Спосіб автоматичного керування технологічним об’єктом на основі прогностичних моделей
Номер патенту: 97566
Опубліковано: 25.03.2015
Автори: Кишенько Василь Дмитрович, Ковпак Роман Васильович, Ладанюк Анатолій Петрович

Формула / Реферат
Спосіб автоматичного керування технологічним об'єктом на основі прогностичних моделей, що передбачає визначення сигналу розузгодження, формування керуючої дії згідно з пропорційно-інтегрально-диференціальним законом, визначення прогнозної складової і формування керуючої дії на виконавчий механізм шляхом алгебраїчного додавання управляючої дії від контролера і прогнозної складової на суматорі, який відрізняється тим, що сигнал розузгодження розділяється на трендову, періодичну і випадкову складові, для кожної з якої на основі відповідних математичних моделей формуються окремі складові прогнозу, що надходять на суматор.
Текст
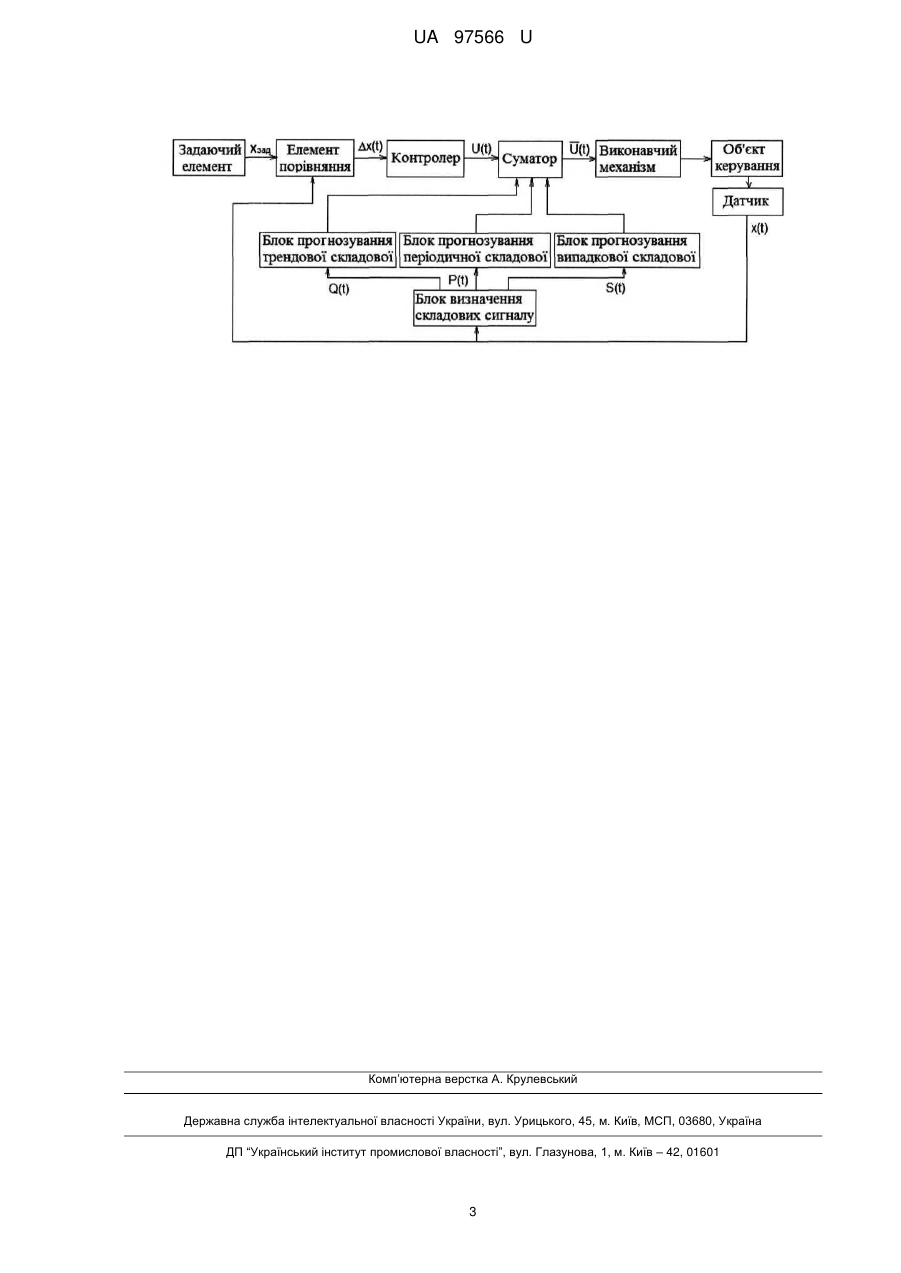
Реферат: Спосіб автоматичного керування технологічним об'єктом на основі прогностичних моделей передбачає визначення сигналу розузгодження, формування керуючої дії згідно з пропорційноінтегрально-диференціальним законом, визначення прогнозної складової і формування керуючої дії на виконавчий механізм шляхом алгебраїчного додавання керуючої дії від контролера і прогнозної складової на суматорі. Сигнал розузгодження розділяється на трендову, періодичну і випадкову складові, для кожної з якої на основі відповідних математичних моделей формуються окремі складові прогнозу, що надходять на суматор. UA 97566 U (12) UA 97566 U UA 97566 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до способів керування нестаціонарним технологічним об'єктом. Як аналог вибраний патент США 7451004 В2, опублікований 11.11.2008 [Onlineadaptivemodelpredicativecontrolinprocesscontrolsystem], в якому формулюється спосіб адаптивного керування на основі прогнозування, згідно з яким в режимі реального часу проводиться ідентифікація прогностичної моделі за інформацією, що надходить від об'єкта керування. Основним недоліком аналога є те, що прогностична модель не враховує різноманітностей поведінки об'єкта, що значно знижує швидкодію прийняття рішень по керуванню. Як найближчий аналог вибраний спосіб формування керуючого впливу для промислового об'єкта керування [Патент Російської федерації RU №2450303 С1 від 10.05.2012], бюлетень № 13, який передбачає визначення сигналу розузгодження, формування керуючої дії згідно з пропорційно-інтегрально-диференціальним законом, яка реалізується виконавчим механізмом промислового об'єкта керування. При цьому в кожний момент вимірювання обчислюють різницю між математичним сподіванням технологічного параметра і його заданим значенням і при умові, якщо ця різниця стане меншою ніж порогове значення закінчують вимірювання і за різницею між сталою часу об'єкта і інтервалом часу вимірювання знаходять діапазон часу прогнозування, а також за поліноміальною залежністю обчислюють прогнозоване значення технологічного параметра, в результаті чого формують управляючу дію на виконавчий механізм шляхом алгебраїчного додавання прогнозованої складової і складової управляючої дії від регулятора. Недоліком такого способу є неврахування складових сигналу технологічного параметра, які по різному діють на об'єкт керування, маючи різний спектр частот дії, різний коефіцієнт впливу на об'єкт, що приводить до зниження точності керування. В основу корисної моделі поставлена задача підвищення точності регулювання технологічного параметра. Технічним результатом запропонованого способу є розширення функціональних можливостей системи керування за рахунок точнішого прогнозування поведінки об'єкта з урахуванням особливостей цієї поведінки. Поставлена задача вирішується за допомогою формування керуючої дії згідно з пропорційно-інтегрально-диференціальним законом, визначення прогнозної складової і формування керуючої дії на виконавчий механізм шляхом алгебраїчного додавання керуючої дії від контролера і прогнозної складової на суматорі, згідно з корисною моделлю, сигнал розузгодження розділяється на трендову, періодичну і випадкову складові, для кожної з якої на основі відповідних математичних моделей формуються окремі складові прогнозу, що надходять на суматор. Причинно-наслідковий зв'язок між запропонованими технічними ознаками та очікуваним результатом полягає в використанні контролера, в якому реалізований пропорційноінтегрально-диференціальний закон керування, на вхід якого в кожний момент часу подається сигнал розузгодження між вимірюваним і заданим значеннями технологічного параметра, а на виході контролера отримують керуючу дію, яка подається на виконавчий механізм об'єкта керування. Крім того, прогнозують поведінку об'єкта, розділяючи значення технологічного параметрах (t) на трендову, періодичну та випадкову складові: x(t)=Q(t)+P(t)+S(t), де Q(t) - тренд - стійкі систематичні змінювання; P(t) - періодична складова - коливання відносно тренду; S(t) - нерегулярна складова - випадковий шум. Для виділення трендової складової використовується поліноміальна модель: 2 3 Q(t) = a0 + a1t + a2t + a3t , де а0, a1, a2, a3 - коефіцієнти, t - час. Періодична складова представлена рядом Фур'є: t 55 n ak cos 2fk kt bk sin 2fkkt , k 1 де n - кількість частот, включених в модель; ak, bk - коефіцієнти розкладання; fk - частота. Прогнозування випадкової складової здійснюється на основі статистичної характеристики як математичного сподівання M[X(t)] і коваріаційної функції rX(Ө): t 0 t r t 0 t , 1 UA 97566 U 5 10 15 20 25 30 35 40 де - прогнозоване значення; rX(Ө) - коефіцієнт кореляції. Корисна модель пояснюється кресленням де показана функціональна схема системи автоматичного керування технологічним об'єктом з урахуванням прогнозної складової. На кресленні представлені блоки: - Задавальний елемент - для введення заданого значення технологічного параметра; - Елемент порівняння - для порівняння заданого і дійсного значення технологічного параметра і формування сигналу розузгодження; - Контролер - для формування керуючого сигналу; - Суматор - для алгебраїчного підсумовування складових прогнозної складової і сигналу керуючого впливу; - Виконавчий механізм - для формування керуючого впливу на технологічний об'єкт; - Об'єкт керування - технологічний об'єкт; - Датчик - для вимірювання значення контрольованого параметра; - Блок визначення складових сигналу - для декомпозиції значення параметра на складові: трендову, періодичну і випадкову; - Блок прогнозування трендової складової - для формування прогнозованого значення трендової складової; - Блок прогнозування періодичної складової - для формування прогнозованого значення періодичної складової; - Блок прогнозування випадкової складової - для формування прогнозованого значення випадкової складової. На кресленні використовуються такі позначення сигналів: Хзад - задане значення технологічного параметра; Δx(t) - сигнал розузгодження; U(t) - керуючий сигнал від ШД-регулятора; U( t ) - сигнал, еквівалентний керуючому впливу з урахуванням складових прогнозування; х(t) - фактичне значення технологічного параметра; Q(t) - сигнал трендової складової вимірюваного параметра; P(t) - сигнал періодичної складової вимірюваного параметра; S(t) - сигнал випадкової складової вимірюваного параметра. Спосіб реалізується наступним чином: в кожний момент часу датчиком вимірюється значення технологічного параметра, далі цей сигнал піддається декомпозиції на складові (трендову, періодичну і випадкову). Відповідно до значень складових формується прогноз за кожною з них про перебіг процесу, на основі якого вносять коригуючу дію, на керування шляхом алгебраїчного додавання сигналів прогнозу із сигналом керування від контролера. Скоригована згідно з прогнозом керуюча дія U( t ) завдяки виконавчому механізму реалізується на об'єкті керування. Технічним результатом запропонованого способу є розширення функціональних можливостей системи керування за рахунок точнішого прогнозування поведінки об'єкта з урахуванням особливостей цієї поведінки. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Спосіб автоматичного керування технологічним об'єктом на основі прогностичних моделей, що передбачає визначення сигналу розузгодження, формування керуючої дії згідно з пропорційноінтегрально-диференціальним законом, визначення прогнозної складової і формування керуючої дії на виконавчий механізм шляхом алгебраїчного додавання управляючої дії від контролера і прогнозної складової на суматорі, який відрізняється тим, що сигнал розузгодження розділяється на трендову, періодичну і випадкову складові, для кожної з якої на основі відповідних математичних моделей формуються окремі складові прогнозу, що надходять на суматор. 2 UA 97566 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюLadaniuk Anatolii Petrovych
Автори російськоюЛаданюк Анатолий Петрович
МПК / Мітки
МПК: G05B 13/04
Мітки: керування, технологічним, об'єктом, автоматичного, моделей, прогностичних, спосіб, основі
Код посилання
<a href="https://ua.patents.su/5-97566-sposib-avtomatichnogo-keruvannya-tekhnologichnim-obehktom-na-osnovi-prognostichnikh-modelejj.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування технологічним об’єктом на основі прогностичних моделей</a>
Система керування технологічним об’єктом з використанням багатопараметричного регулятора на основі нечіткої логіки
Номер патенту: 58947
Опубліковано: 26.04.2011
Автори: Ладанюк Анатолій Петрович, Кроніковський Дмитро Олегович
МПК: G05B 13/02, G05B 11/01
Мітки: багатопараметричного, основі, система, логіки, регулятора, об'єктом, керування, технологічним, нечіткої, використанням
Формула / Реферат:
Система керування технологічним об'єктом з використанням багатопараметричного регулятора на основі нечіткої логіки, що містить об'єкт керування, датчики, регулюючі органи, виконавчі механізми, пропорційно-інтегрально-диференційний регулятор, яка відрізняється тим, що пропорційно-інтегрально-диференційний регулятор додатково містить похідні другого та третього порядку, а система додатково містить блок нечіткої логіки, який в свою чергу...
Система керування технологічним об`єктом
Номер патенту: 51692
Опубліковано: 26.07.2010
Автори: Храмцов Анатолій Дмитрович, Бабічева Ольга Федорівна, Лукашова Наталя Павлівна, Єсаулов Сергій Михайлович, Браславець Оксана Сергіївна
МПК: G05B 13/00
Мітки: керування, об'єктом, система, технологічним
Формула / Реферат:
Система керування технологічним об'єктом, що містить послідовно з'єднані вимірник розузгодження, перший регулятор, суматор, об'єкт керування, вихід якого підключений до першого входу вимірника розузгодження, до другого входу якого підключено задатчик, до виходу вимірника розузгодження підключені також послідовно з'єднані перший блок порівняння і другий регулятор, вихід якого з'єднаний з другим входом суматора, до виходу якого підключені...
Спосіб автоматичного керування на основі зворотного зв’язку по відхиленню величини та фазового запізнення вихідного сигналу об’єкта керування
Номер патенту: 103548
Опубліковано: 25.10.2013
Автор: Агамалов Олег Миколайович
МПК: G05B 11/01, G05B 13/02
Мітки: сигналу, зв'язку, керування, автоматичного, зворотного, спосіб, вихідного, величини, запізнення, відхиленню, об'єкта, фазового, основі
Формула / Реферат:
Спосіб автоматичного керування (САУ) на основі зворотного зв'язку по відхиленню величини та фазового запізнення вихідного сигналу об'єкта керування, в якому зворотній зв'язок по відхиленню величини та фазового запізнення вихідного сигналу об'єкта керування використовують для формування сигналу керування об’єктом керування, в якому використовують різницю величин між заданим значенням r та вихідним значенням сигналу об'єкта керування у, який...
Спосіб керування технологічним процесом
Номер патенту: 64469
Опубліковано: 10.11.2011
Автори: Лебедєв Лев Миколайович, Дубовик Володимир Григорович, Шелест Ігор Володимирович
МПК: B02C 25/00
Мітки: спосіб, керування, процесом, технологічним
Формула / Реферат:
Спосіб управління технологічним процесом, що містить формування тривимірних часових рядів сигналів технологічної інформації, використання їх перетинів для вибору рівня регульованої змінної технологічного процесу, який відрізняється тим, що формують багатошарове інформаційне поле сигналу технологічної інформації з шарів характеристичних ознак і кортежів їх похідних за ортогональними осями і діагоналями, роблять перетини багатошарового...
Спосіб керування технологічним процесом
Номер патенту: 62760
Опубліковано: 12.09.2011
Автори: Дубовик Володимир Григорович, Онисимчук Микола Олександрович, Лебедєв Лев Миколайович
МПК: B02C 25/00
Мітки: керування, процесом, спосіб, технологічним
Формула / Реферат:
Спосіб керування технологічним процесом, що включає формування тривимірного часового ряду сигналу технологічної інформації, використання значень з його перетину для вибору рівня регульованої змінної технологічного процесу, який відрізняється тим, що прогнозують наступні значення тривимірних часових рядів характеристичних ознак сигналу технологічної інформації, на входи штучної нейронної мережі подають прогнозні значення з n-перетинів...
Попередній патент: Суміш для дитячого харчування
Наступний патент: Сік овочево-фруктовий
Випадковий патент: Комплекс системи керування і захисту реактора