Комбінована ґрунтообробна машина
Номер патенту: 106517
Опубліковано: 10.09.2014

Формула / Реферат
1. Комбінована ґрунтообробна машина, яка складається з послідовно встановлених по його довжині шарнірно сполучених секцій рам з робочими органами, з'єднаних механізмом переведення в транспортне положення, наприклад гідроциліндром, яка відрізняється тим, що шарнірне з'єднання секцій рам виконано у вигляді поздовжнього паза в щоках однієї рами і розміщеного в ньому пальця іншої рами, крім того, в робочому положенні секції рам додатково сполучені за допомогою рухомого з'єднання, розміщеного перед шарнірним і виконаного у вигляді відкритого поздовжнього паза в щоках однієї рами і розміщеного в ньому пальця іншої рами, при цьому довжина паза рухомого з'єднання менша за довжину паза шарнірного з'єднання на величину, що перевищує ширину паза рухомого з'єднання.
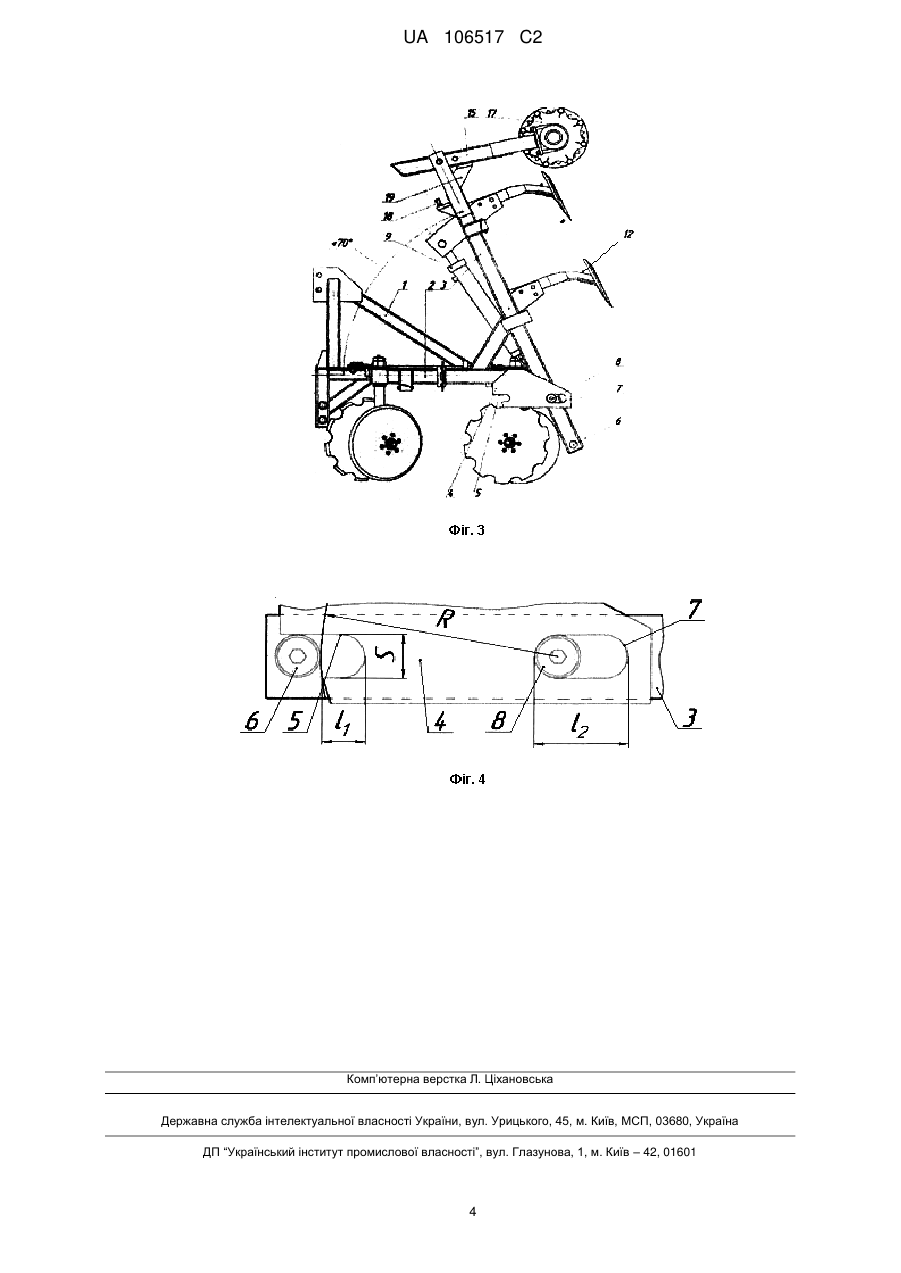
2. Комбінована ґрунтообробна машина за п. 1, яка відрізняється тим, що до рами шарнірно приєднані повідці, на яких встановлений коток, при цьому в транспортному положенні кут між рамами менший за 70°, а повідці котка повернені вниз.
Текст
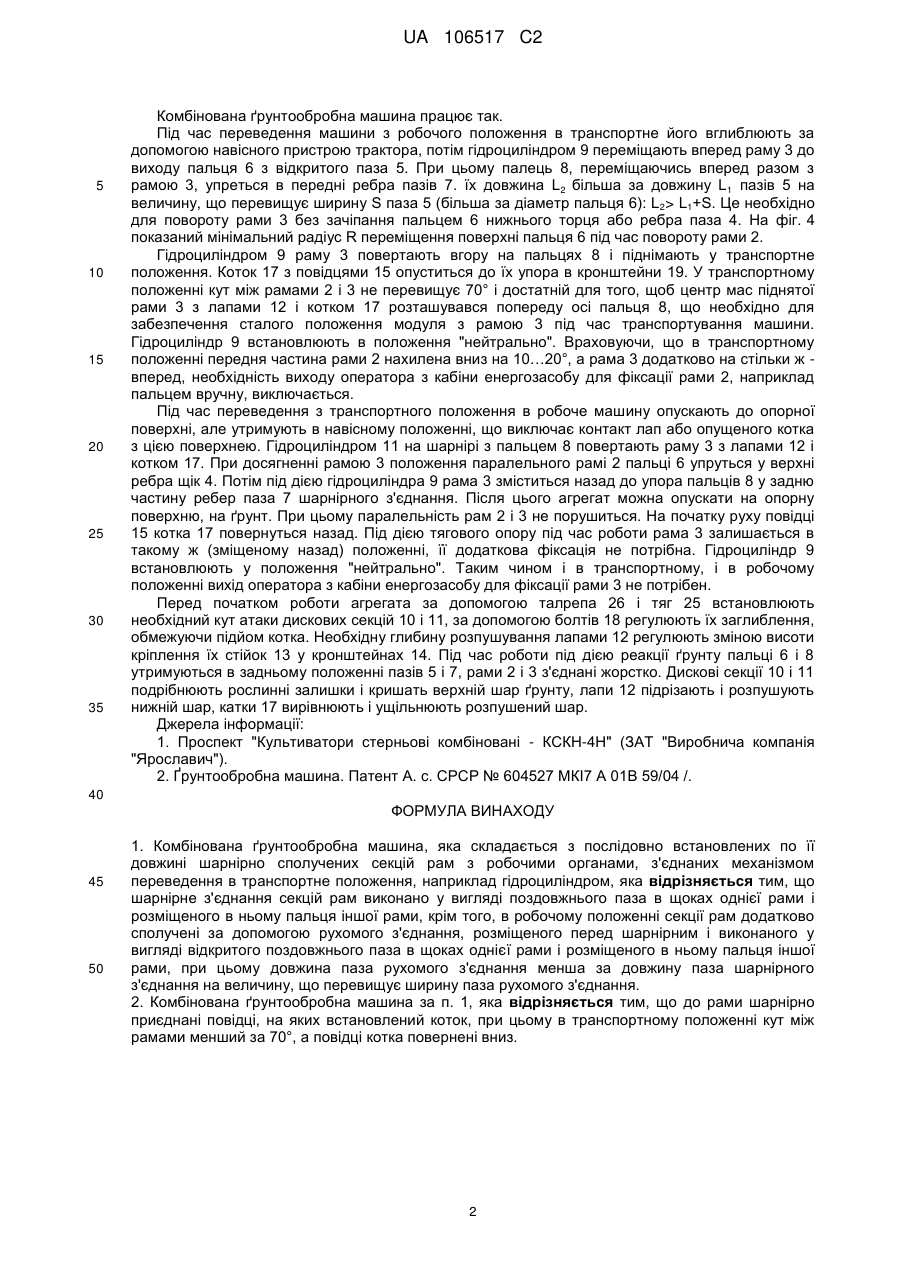
Реферат: Заявлена комбінована ґрунтообробна машина складається з послідовно встановлених по її довжині шарнірно сполучених секцій рам з робочими органами, з'єднаних механізмом переведення в транспортне положення, наприклад гідроциліндром. Шарнірне з'єднання секцій рам виконано у вигляді поздовжнього паза в щоках однієї рами і розміщеного в ньому пальця іншої рами. В робочому положенні секції рам додатково сполучені за допомогою рухомого з'єднання, розміщеного перед шарнірним і виконаного у вигляді відкритого поздовжнього паза в щоках однієї рами і розміщеного в ньому пальця іншої рами. Довжина паза рухомого з'єднання менша за довжину паза шарнірного з'єднання на величину, що перевищує ширину паза рухомого з'єднання. UA 106517 C2 (12) UA 106517 C2 UA 106517 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі сільського господарства, зокрема до комбінованих ґрунтообробних машин. Відомі ґрунтообробні машини з багаторядним розташуванням робочих органів [1] - проспект "Культиватори стерньові комбіновані - КСКН-4Н" (ЗАТ "Виробнича компанія « Ярославич"). Для зменшення їх транспортного габариту по довжині задню секцію рами з робочими органами повертають відносно горизонтальної поперечної осі, піднімають і розміщують над передньою секцією. Недолік відомої конструкції полягає в тому, що під час її переведення з транспортного положення в робоче необхідна її жорстка фіксація пальцями і для цього треба вийти з кабіни, а при переведенні машини в транспортне положення потрібно необхідно вийти з кабіни для роз'єднання секцій рами щоб витягнути пальці. Це знижує коефіцієнт використання змінного часу. Найближчою за технічною суттю до заявленої є вибрана як прототип ґрунтообробна машина [2] - АС СРСР № 604527 МКІ7 А 01В 59/04, яка включає трисекційну по довжині раму і закріплені на ній робочі органи. Для поліпшення поздовжньої стійкості та зменшення габариту по висоті рама виконана у вигляді секцій, шарнірно з'єднаних між собою і додатково сполучених за допомогою гідроциліндрів, що забезпечують підйом і переведення секцій в транспортне положення. Недоліком відомої конструкції є те, що кожному шарнірному з'єднанню потрібен гідроциліндр, а робоче положення секцій також вимагає їх жорсткої фіксації вручну, що пов'язано з виходом тракториста з кабіни трактора. Технічною задачею винаходу є спрощення переведення в транспортне та робоче положення ґрунтообробної машини з багаторядним розташуванням робочих органів, закріплених на декількох послідовно встановлених секціях рам, виключення фіксації рам вручну, пов'язаної з виходом тракториста з кабіни. Технічна задача вирішується тим, що в комбінованій ґрунтообробній машині, що складається з послідовно встановлених по її довжині шарнірно сполучених секцій рам з робочими органами, з'єднаних механізмом переведення в транспортне положення, наприклад гідроциліндром, згідно з винаходом, шарнірне з'єднання секцій рам виконано у вигляді поздовжнього паза в щоках однієї рами і розміщеного в ньому пальця іншої рами, крім того, в робочому положенні секції рам додатково сполучені за допомогою рухомого з'єднання, розміщеного перед шарнірним і виконаного у вигляді відкритого поздовжнього паза в щоках однієї рами і розміщеного в ньому пальця іншої рами, при цьому довжина паза рухомого з'єднання менша за довжину паза шарнірного з'єднання на величину, що перевищує ширину паза рухомого з'єднання. Крім того, в транспортному положенні кут між рамами становить менше 70°, при цьому повідці котка повернені вниз. Комбінована ґрунтообробна машина показана на фіг. 1 - у робочому положенні, вигляд збоку; фіг. 2 - у робочому положенні, вигляд зверху; фіг. 3 - у транспортному положенні, вигляд збоку; фіг. 4 - положення пальців у пазах перед поворотом вгору другої секції рами. Комбінована ґрунтообробна машина містить навісний пристрій 1, секції рам (модулі) 2 і 3, пов'язані за допомогою рухомого і шарнірного з'єднань, виконаних у вигляді закріплених на рамі 2 щік 4 з відкритими пазами 5, в яких встановлені пальці 6 із закритими пазами 7 з пальцями 8. Пальці 6 і 8 закріплені на рамі 3. На них встановлені кільця, що контактують з ребрами пазів 5 і 7. Діаметр кілець трохи менший за ширину пазів, у яких вони переміщаються. Кільця утримуються шайбами і болтами, вкрученими в торці пальців. Секції рам 2 і 3 додатково з'єднані гідроциліндром 9 з нагнітальною і зливною магістралями (не показані). На рамі 2 встановлені два ряди дводискових секцій правих 10 і лівих 11, а на рамі 3 - два ряди лап 12 зі стійками 13, закріпленими в кронштейнах 14. До рами 3 шарнірно приєднані повідці 15, на яких встановлені підшипникові вузли 16 котка 17, виконаного у вигляді трубчастого барабана. Верхні торці повідків15 під час роботи впираються в регулювальні болти 18, встановлені в кронштейнах рами 3. Під час роботи вони обмежують підйом катка 17 і заглиблення агрегата. Кронштейни 19 на рамі З обмежують опускання вниз повідків 15 з катком 17 в транспортному положенні машини. Дводискові секції 10 і 11 містять поворотну стійку 20 з підшипниковим вузлом. На його валу 21 закріплені диски 22 і 23. Стійка 21 забезпечена повідцем 24, шарнірно зв'язаним з тягою 25 регулювання кута атаки ряду дискових секцій 10 і 11. Тяга 25 з'єднана із закріпленим на рамі 2 талрепом 26, за допомогою якого вона переміщається і повертає стійки 20 з дисками 22 і 23, змінює кут атаки секцій 10 і 11. Верхня частина стійок 13 лап 12 містить ряд ярусно розташованих отворів (зенківок) для регулювання заглиблення лап відносно дискових секцій. 1 UA 106517 C2 5 10 15 20 25 30 35 Комбінована ґрунтообробна машина працює так. Під час переведення машини з робочого положення в транспортне його вглиблюють за допомогою навісного пристрою трактора, потім гідроциліндром 9 переміщають вперед раму 3 до виходу пальця 6 з відкритого паза 5. При цьому палець 8, переміщаючись вперед разом з рамою 3, упреться в передні ребра пазів 7. їх довжина L2 більша за довжину L1 пазів 5 на величину, що перевищує ширину S паза 5 (більша за діаметр пальця 6): L2> L1+S. Це необхідно для повороту рами 3 без зачіпання пальцем 6 нижнього торця або ребра паза 4. На фіг. 4 показаний мінімальний радіус R переміщення поверхні пальця 6 під час повороту рами 2. Гідроциліндром 9 раму 3 повертають вгору на пальцях 8 і піднімають у транспортне положення. Коток 17 з повідцями 15 опуститься до їх упора в кронштейни 19. У транспортному положенні кут між рамами 2 і 3 не перевищує 70° і достатній для того, щоб центр мас піднятої рами 3 з лапами 12 і котком 17 розташувався попереду осі пальця 8, що необхідно для забезпечення сталого положення модуля з рамою 3 під час транспортування машини. Гідроциліндр 9 встановлюють в положення "нейтрально". Враховуючи, що в транспортному положенні передня частина рами 2 нахилена вниз на 10…20°, а рама 3 додатково на стільки ж вперед, необхідність виходу оператора з кабіни енергозасобу для фіксації рами 2, наприклад пальцем вручну, виключається. Під час переведення з транспортного положення в робоче машину опускають до опорної поверхні, але утримують в навісному положенні, що виключає контакт лап або опущеного котка з цією поверхнею. Гідроциліндром 11 на шарнірі з пальцем 8 повертають раму 3 з лапами 12 і котком 17. При досягненні рамою 3 положення паралельного рамі 2 пальці 6 упруться у верхні ребра щік 4. Потім під дією гідроциліндра 9 рама 3 зміститься назад до упора пальців 8 у задню частину ребер паза 7 шарнірного з'єднання. Після цього агрегат можна опускати на опорну поверхню, на ґрунт. При цьому паралельність рам 2 і 3 не порушиться. На початку руху повідці 15 котка 17 повернуться назад. Під дією тягового опору під час роботи рама 3 залишається в такому ж (зміщеному назад) положенні, її додаткова фіксація не потрібна. Гідроциліндр 9 встановлюють у положення "нейтрально". Таким чином і в транспортному, і в робочому положенні вихід оператора з кабіни енергозасобу для фіксації рами 3 не потрібен. Перед початком роботи агрегата за допомогою талрепа 26 і тяг 25 встановлюють необхідний кут атаки дискових секцій 10 і 11, за допомогою болтів 18 регулюють їх заглиблення, обмежуючи підйом котка. Необхідну глибину розпушування лапами 12 регулюють зміною висоти кріплення їх стійок 13 у кронштейнах 14. Під час роботи під дією реакції ґрунту пальці 6 і 8 утримуються в задньому положенні пазів 5 і 7, рами 2 і 3 з'єднані жорстко. Дискові секції 10 і 11 подрібнюють рослинні залишки і кришать верхній шар ґрунту, лапи 12 підрізають і розпушують нижній шар, катки 17 вирівнюють і ущільнюють розпушений шар. Джерела інформації: 1. Проспект "Культиватори стерньові комбіновані - КСКН-4Н" (ЗАТ "Виробнича компанія "Ярославич"). 2. Ґрунтообробна машина. Патент А. с. СРСР № 604527 МКІ7 А 01В 59/04 /. 40 ФОРМУЛА ВИНАХОДУ 45 50 1. Комбінована ґрунтообробна машина, яка складається з послідовно встановлених по її довжині шарнірно сполучених секцій рам з робочими органами, з'єднаних механізмом переведення в транспортне положення, наприклад гідроциліндром, яка відрізняється тим, що шарнірне з'єднання секцій рам виконано у вигляді поздовжнього паза в щоках однієї рами і розміщеного в ньому пальця іншої рами, крім того, в робочому положенні секції рам додатково сполучені за допомогою рухомого з'єднання, розміщеного перед шарнірним і виконаного у вигляді відкритого поздовжнього паза в щоках однієї рами і розміщеного в ньому пальця іншої рами, при цьому довжина паза рухомого з'єднання менша за довжину паза шарнірного з'єднання на величину, що перевищує ширину паза рухомого з'єднання. 2. Комбінована ґрунтообробна машина за п. 1, яка відрізняється тим, що до рами шарнірно приєднані повідці, на яких встановлений коток, при цьому в транспортному положенні кут між рамами менший за 70°, а повідці котка повернені вниз. 2 UA 106517 C2 3 UA 106517 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюKRAVCHUK VOLODYMYR IVANOVYCH
Автори російськоюЖУК АЛЕКСЕЙ ФЕОДОСИЕВИЧ, КРАВЧУК ВЛАДИМИР ИВАНОВИЧ
МПК / Мітки
МПК: A01B 49/00, A01B 59/04
Мітки: ґрунтообробна, машина, комбінована
Код посилання
<a href="https://ua.patents.su/6-106517-kombinovana-runtoobrobna-mashina.html" target="_blank" rel="follow" title="База патентів України">Комбінована ґрунтообробна машина</a>
Комбінована ґрунтообробна машина

Номер патенту: 50794
Опубліковано: 25.06.2010
Автори: Стрельчук Олександр Якович, Нісмейко Сергій Сергійович, Бончик Віталій Семенович, Арсенюк Олександр Вікторович
МПК: A01B 49/00
Мітки: машина, ґрунтообробна, комбінована
Формула / Реферат:
1. Комбінована ґрунтообробна машина, що містить раму, на якій розміщені опорні колеса, плоскорізальні лапи, вертикальні ротори, карданна передача, конічний редуктор, яка відрізняється тим, що плоскорізальні лапи розміщені спереду по осьовій лінії між двома вертикальними роторами, причому ширина захвату двох вертикальних роторів і плоскорізальної лапи співпадають.2. Комбінована ґрунтообробна машина за п. 1, яка відрізняється тим,...
Універсальна ґрунтообробна машина

Номер патенту: 82453
Опубліковано: 12.08.2013
Автори: ЖУК АЛЕКСЄЙ ФЄОДОСІЄВІЧ, Кравчук Володимир Іванович
МПК: A01B 49/00
Мітки: універсальна, ґрунтообробна, машина
Формула / Реферат:
1. Універсальна ґрунтообробна машина, яка містить шарнірно сполучені рамку з котком і раму з приєднувальним пристроєм, поздовжніми і поперечними балками і робочими органами, яка відрізняється тим, що рама виконана у вигляді секції з дисковими робочими органами і закріпленими на її поздовжніх балках щоками з співвісними отворами і встановленими в них пальцями, на яких з можливістю заміни закріплені поздовжні балки легкознімної секції рами з...
Ґрунтообробна машина з ножами, що входять в ґрунт періодично
Номер патенту: 59323
Опубліковано: 10.05.2011
Автори: Божидарник Віктор Володимирович, Кужель Емма Вікторівна
МПК: A01B 33/00
Мітки: ґрунтообробна, ґрунт, ножами, машина, періодичної, входять
Формула / Реферат:
1. Ґрунтообробна машина з ножами, що входять в ґрунт періодично, яка містить редуктор, на кінцях веденого вала якого жорстко закріплені фігурні елементи, що змонтовані з можливістю спільного обертання з веденим валом та контакту з верхніми кінцями підпружинених штоків, а на нижніх кінцях підпружинених штоків встановлений кріпильний елемент з ножами-зубами, при цьому ножі встановлені з можливістю хитального руху відповідно до стиску-розтягу...
Ґрунтообробна машина
Номер патенту: 17163
Опубліковано: 15.09.2006
Автори: Нікітіна Олена Станіславівна, Бакум Микола Васильович, Бобрусь Іван Степанович, Нікітін Станіслав Петрович
МПК: A01B 7/00
Мітки: машина, ґрунтообробна
Формула / Реферат:
Грунтообробна машина, яка включає раму, шарнірно встановлені на ній стовби, на яких закріплені під кутом до напрямку руху (кут атаки) дискові робочі органи та механізми зміни глибини обробітку і з'єднання з енергомодулем, яка відрізняється тим, що стовби на рамі встановлені з можливістю коливання навколо своєї осі із змінною частотою та амплітудою, з можливістю при зменшенні кута атаки одного дискового робочого органу кут атаки сусідніх з ним...
Комбінована грунтообробна посівна машина

Номер патенту: 25070
Опубліковано: 25.07.2007
Автори: Лящук Микола Федорович, Васківнюк Юрій Миколайович, Романенко Михайло Пилипович, Зирянов Володимир Олексійович, Білоткач Михайло Петрович
МПК: A01C 7/20, A01B 49/06
Мітки: комбінована, посівна, грунтообробна, машина
Формула / Реферат:
Комбінована ґрунтообробна посівна машина, що містить раму, причіпний пристрій, опорно-привідні колеса, ґрунтообробні посівні робочі органи з гряділями, бункер, елеватор і розподільник висівного матеріалу та проводи туконасіння, яка відрізняється тим, що додатково має зачіпний пристрій у вигляді трикутника, який постійно закріплений на рамі, а причіпний пристрій є знімним і виконаний у вигляді трибрусової сниці та з'єднаний з рамою пальцями з...
Попередній патент: Композитний матеріал із побутових відходів і спосіб його виготовлення
Наступний патент: Сегнетоелектричний матеріал
Випадковий патент: Спосіб отримання поліпептидів