Спосіб завадозахисту когерентно-імпульсної рлс від комбінованих завад

Формула / Реферат
Спосіб захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад з пачковою модуляцією частоти повторення зондуючих імпульсів від комбінованих завад, в якому проводиться фазова (часова) та поляризаційна або просторова фільтрація, який відрізняється тим, що часово-просторову (часово-поляризаційну) та просторово-часову (поляризаційно-часову) обробку сигналів в кожному дискреті дальності виконують паралельно, для чого прийняті основним та компенсаційним каналами сигнали поділяють та подають як на пристрій часово-просторової (часово-поляризаційної), так і на пристрій просторово-часової (поляризаційно-часової) обробки сигналів, в яких компенсують активну шумову заваду та виконують часову (фазову) фільтрацію; після цього в кожному фільтровому каналі обчислюють модуль, виявляють корисні сигнали на фоні пасивних завад як після часово-просторової, так і після просторово-часової обробки та відображають виявлені цілі на моніторі радіолокатора.
Текст
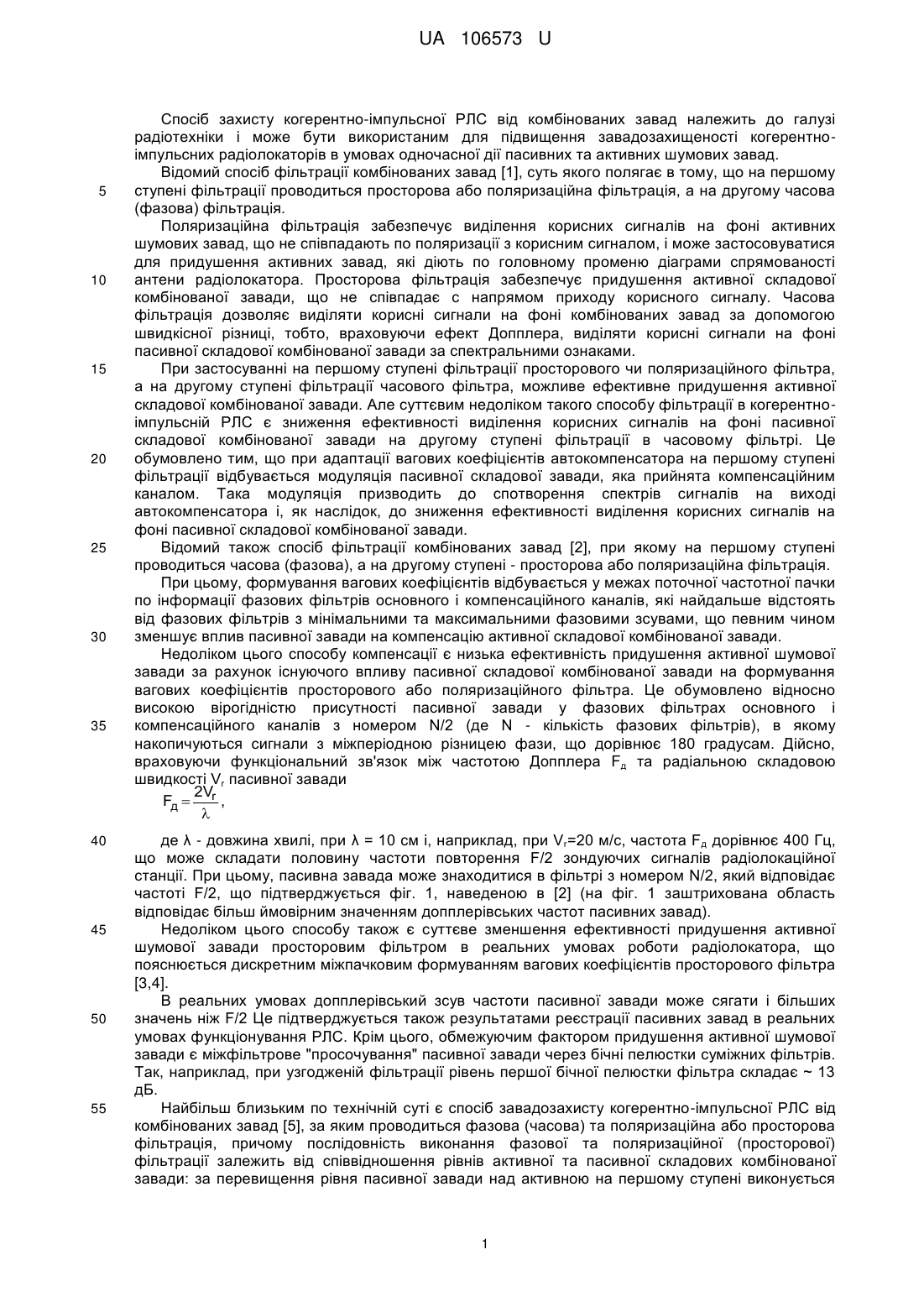
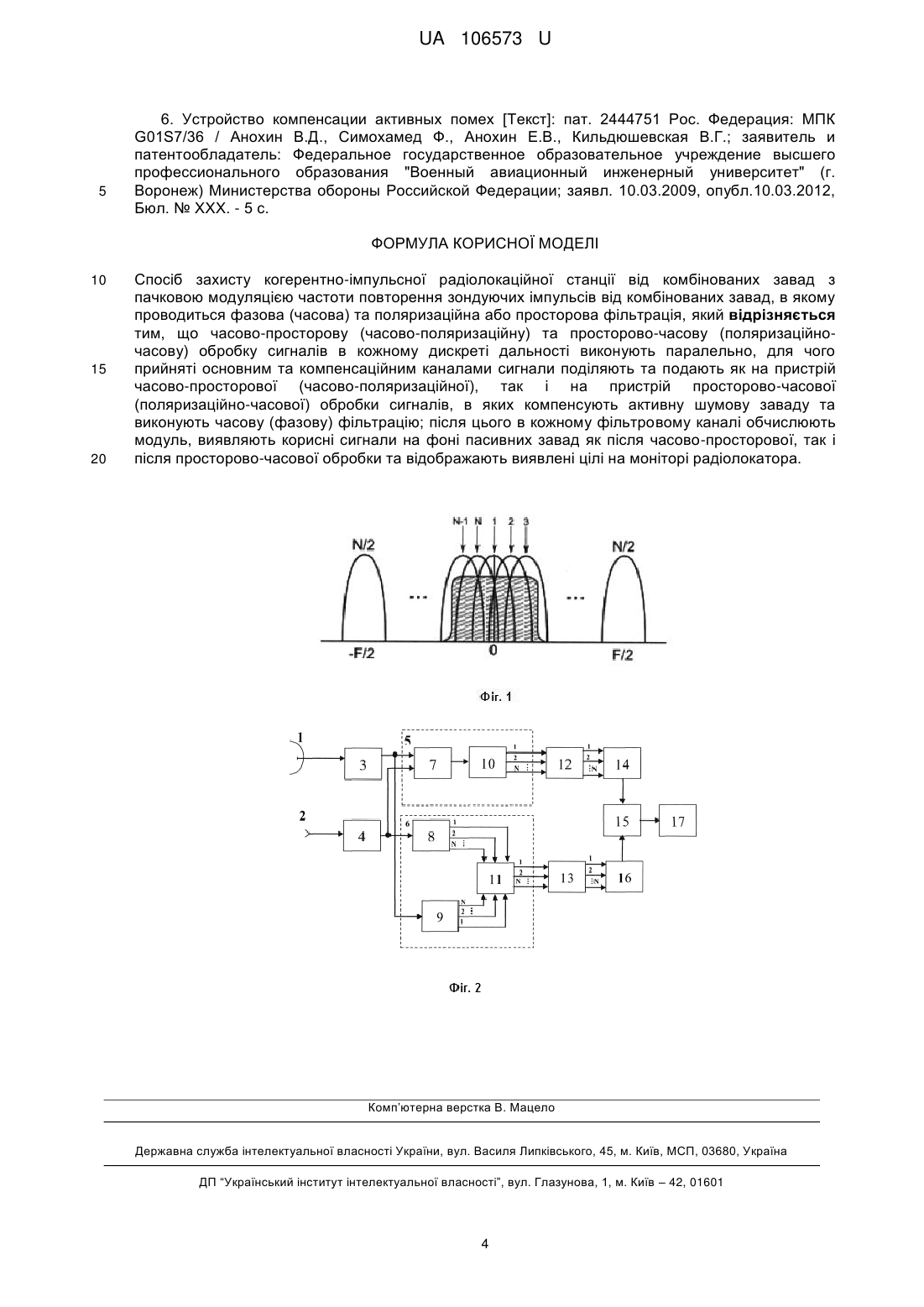
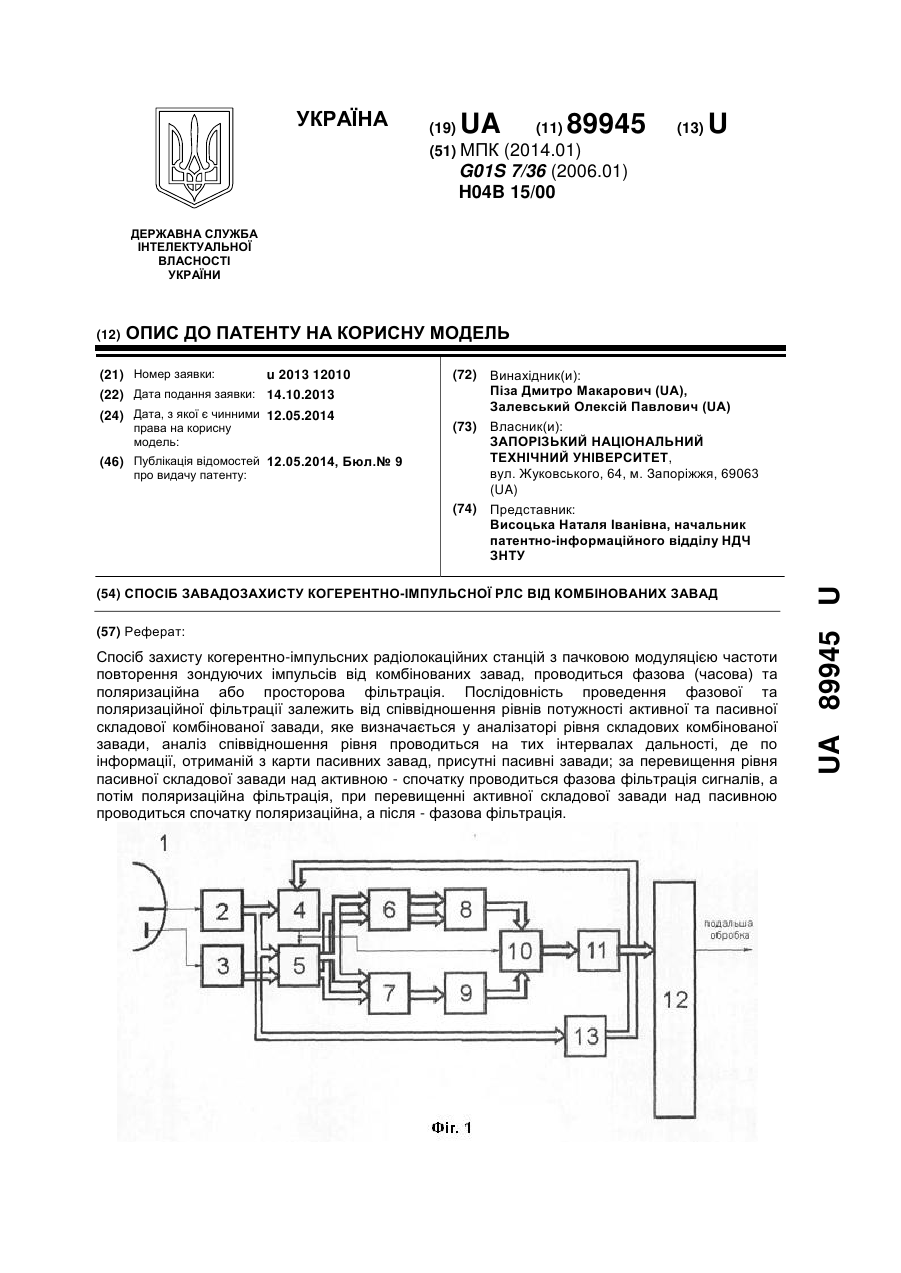
Реферат: В способі захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад з пачковою модуляцією частоти повторення зондуючих імпульсів від комбінованих завад проводять фазову (часову) та поляризаційну або просторову фільтрацію. Часово-просторову (часово-поляризаційну) та просторово-часову (поляризаційно-часову) обробку сигналів в кожному дискреті дальності виконують паралельно, для чого прийняті основним та компенсаційним каналами сигнали поділяють та подають як на пристрій часово-просторової (часово-поляризаційної), так і на пристрій просторово-часової (поляризаційно-часової) обробки сигналів, в яких компенсують активну шумову заваду та виконують часову (фазову) фільтрацію. Після цього в кожному фільтровому каналі обчислюють модуль, виявляють корисні сигнали на фоні пасивних завад як після часово-просторової, так і після просторово-часової обробки та відображають виявлені цілі на моніторі радіолокатора. UA 106573 U (12) UA 106573 U UA 106573 U 5 10 15 20 25 30 35 40 45 50 55 Спосіб захисту когерентно-імпульсної РЛС від комбінованих завад належить до галузі радіотехніки і може бути використаним для підвищення завадозахищеності когерентноімпульсних радіолокаторів в умовах одночасної дії пасивних та активних шумових завад. Відомий спосіб фільтрації комбінованих завад [1], суть якого полягає в тому, що на першому ступені фільтрації проводиться просторова або поляризаційна фільтрація, а на другому часова (фазова) фільтрація. Поляризаційна фільтрація забезпечує виділення корисних сигналів на фоні активних шумових завад, що не співпадають по поляризації з корисним сигналом, і може застосовуватися для придушення активних завад, які діють по головному променю діаграми спрямованості антени радіолокатора. Просторова фільтрація забезпечує придушення активної складової комбінованої завади, що не співпадає с напрямом приходу корисного сигналу. Часова фільтрація дозволяє виділяти корисні сигнали на фоні комбінованих завад за допомогою швидкісної різниці, тобто, враховуючи ефект Допплера, виділяти корисні сигнали на фоні пасивної складової комбінованої завади за спектральними ознаками. При застосуванні на першому ступені фільтрації просторового чи поляризаційного фільтра, а на другому ступені фільтрації часового фільтра, можливе ефективне придушення активної складової комбінованої завади. Але суттєвим недоліком такого способу фільтрації в когерентноімпульсній РЛС є зниження ефективності виділення корисних сигналів на фоні пасивної складової комбінованої завади на другому ступені фільтрації в часовому фільтрі. Це обумовлено тим, що при адаптації вагових коефіцієнтів автокомпенсатора на першому ступені фільтрації відбувається модуляція пасивної складової завади, яка прийнята компенсаційним каналом. Така модуляція призводить до спотворення спектрів сигналів на виході автокомпенсатора і, як наслідок, до зниження ефективності виділення корисних сигналів на фоні пасивної складової комбінованої завади. Відомий також спосіб фільтрації комбінованих завад [2], при якому на першому ступені проводиться часова (фазова), а на другому ступені - просторова або поляризаційна фільтрація. При цьому, формування вагових коефіцієнтів відбувається у межах поточної частотної пачки по інформації фазових фільтрів основного і компенсаційного каналів, які найдальше відстоять від фазових фільтрів з мінімальними та максимальними фазовими зсувами, що певним чином зменшує вплив пасивної завади на компенсацію активної складової комбінованої завади. Недоліком цього способу компенсації є низька ефективність придушення активної шумової завади за рахунок існуючого впливу пасивної складової комбінованої завади на формування вагових коефіцієнтів просторового або поляризаційного фільтра. Це обумовлено відносно високою вірогідністю присутності пасивної завади у фазових фільтрах основного і компенсаційного каналів з номером N/2 (де N - кількість фазових фільтрів), в якому накопичуються сигнали з міжперіодною різницею фази, що дорівнює 180 градусам. Дійсно, враховуючи функціональний зв'язок між частотою Допплера Fд та радіальною складовою швидкості Vr пасивної завади 2V Fд r , де λ - довжина хвилі, при λ = 10 см і, наприклад, при Vr=20 м/с, частота Fд дорівнює 400 Гц, що може складати половину частоти повторення F/2 зондуючих сигналів радіолокаційної станції. При цьому, пасивна завада може знаходитися в фільтрі з номером N/2, який відповідає частоті F/2, що підтверджується фіг. 1, наведеною в [2] (на фіг. 1 заштрихована область відповідає більш ймовірним значенням допплерівських частот пасивних завад). Недоліком цього способу також є суттєве зменшення ефективності придушення активної шумової завади просторовим фільтром в реальних умовах роботи радіолокатора, що пояснюється дискретним міжпачковим формуванням вагових коефіцієнтів просторового фільтра [3,4]. В реальних умовах допплерівський зсув частоти пасивної завади може сягати і більших значень ніж F/2 Це підтверджується також результатами реєстрації пасивних завад в реальних умовах функціонування РЛС. Крім цього, обмежуючим фактором придушення активної шумової завади є міжфільтрове "просочування" пасивної завади через бічні пелюстки суміжних фільтрів. Так, наприклад, при узгодженій фільтрації рівень першої бічної пелюстки фільтра складає ~ 13 дБ. Найбільш близьким по технічній суті є спосіб завадозахисту когерентно-імпульсної РЛС від комбінованих завад [5], за яким проводиться фазова (часова) та поляризаційна або просторова фільтрація, причому послідовність виконання фазової та поляризаційної (просторової) фільтрації залежить від співвідношення рівнів активної та пасивної складових комбінованої завади: за перевищення рівня пасивної завади над активною на першому ступені виконується 1 UA 106573 U 5 10 15 20 25 30 35 40 45 50 55 60 фазова фільтрація, а потім - поляризаційна або просторова; при перевищенні активної завади над пасивною на першому етапі виконується поляризаційна (просторова), а потім фазова фільтрація. Недолік способу-найближчого аналога полягає в наступному. Внаслідок нестаціонарності пасивної завади по дальності її рівень може суттєво змінюватись. Це може також приводити до зміни співвідношень рівнів активної та пасивної завади. При цьому зміна структури обробки сигналів, наприклад, з часово-просторової на просторово-часову виконується шляхом підключення основного та компенсаційного каналів прийому до відповідних входів автокомпенсатора, який знаходиться на першому ступені обробки сигналів, та налаштування його вагових коефіцієнтів. При зворотній зміні структури обробки сигналів канали прийому підключаються до відповідних пристроїв фазової фільтрації і знову виникає необхідність в налаштуванні вагових коефіцієнтів автокомпенсатора, який знаходиться на другому ступені обробки сигналів. В кожному з розглянутих випадків при зміні структури обробки сигналів на різних інтервалах дальності виникають додаткові перехідні процеси при самонастроюванні вагових коефіцієнтів просторових фільтрів, що погіршує компенсацію активної завади. Задачею заявленої корисної моделі є підвищення ефективності компенсації комбінованих завад за рахунок використання позитивних якостей як часово-просторової, так і просторовочасової обробки сигналів. Поставлена задача вирішується тим, що в способі захисту когерентно-імпульсної РЛС від комбінованих завад з пачковою модуляцією частоти повторення зондуючих імпульсів, в якому проводиться фазова (частотна) та поляризаційна або просторова фільтрація, часовопросторову (часово-поляризаційну) та просторово-часову (поляризаційно-часову) обробку сигналів виконують паралельно в кожному дискреті дальності. При цьому прийняті основним та компенсаційним каналами сигнали поділяють та подають як на пристрій часово-просторової (часово-поляризаційної), так і на пристрій просторово-часової (поляризаційно-часової) обробки сигналів, в яких компенсують активну шумову заваду та виконують фазову фільтрацію сигналів. Після цього в кожному фільтровому каналі обчислюють модуль, а потім виявляють корисні сигнали як після часово-просторової, так і після просторово-часової обробки та відображають виявлені цілі на моніторі радіолокатора. У порівнянні з найближчим аналогом відмітною ознакою є те, що у запропонованому способі структура обробки сигналів залишається незмінною в часі. Це дозволяє виключити наявність додаткових перехідних процесів і, як наслідок, підвищити ефективність компенсації комбінованих завад. Суть способу-аналога [2] та суть способу, що заявляється, пояснюється кресленнями. На фіг.1 показано найбільш ймовірний розподіл спектрів пасивних завад відносно амплітудно-частотних характеристик фазових фільтрів на допплерівській осі частот, яка запозичена з [2]. На фіг. 2 наведена структурна схема приймальної частини радіолокатора, в якій реалізовано спосіб, що заявляється. Суть способу, що пропонується, може бути пояснена на прикладі структурної схеми, яка наведена на фіг. 2 та забезпечує компенсацію активної складової комбінованої завади, діючої по бокових пелюстках діаграми спрямованості антени. До складу приймальної частини входять: основна 1 та компенсаційна 2 антени, основний 3 та компенсаційний 4 канали прийому, пристрій просторово-часової обробки 5, пристрій часово-просторової обробки 6, автокомпенсатори завад 7 та 11, багатоканальні фазові фільтри 8, 9 та 10, обчислювачі модулів 12 та 13, виявлювачі корисних сигналів 14 та 16, пристрій суміщення інформації 15, монітор 17. Приймальна частина радіолокатора, в якій реалізовано спосіб, що заявляється, працює наступним чином. На входи основного 3 та компенсаційного 4 каналів надходять корисні сигнали, активні шумові та пасивні завади, які прийняті основною 1 та компенсаційною 2 антенами. Прийнята суміш сигналів та завад поділяється та надходить на основний і компенсаційний входи автокомпенсатора завад 7. Автокомпенсатор входить до пристрою просторово-часової обробки 5. Прийнята суміш також надходить на входи основного 9 та компенсаційного 8 багатоканальних фазових фільтрів пристрою часово-просторової обробки 6. В автокомпенсаторі завад 7 шляхом регулювання вагових коефіцієнтів компенсують активну шумову заваду. При цьому для зменшення впливу пасивної завади на процес формування вагових коефіцієнтів використовують часові [1] або (та) спектральні [6] відмінності в структурі активних та пасивних завад. З виходу автокомпенсатора завад 7 суміш корисних сигналів та пасивних завад надходить до багатоканального фазового фільтра 10, де сигнали розділяються 2 UA 106573 U 5 10 15 20 25 30 35 40 45 50 55 за спектральними ознаками та виконується когерентне накопичення корисних сигналів. Спектральні складові корисних сигналів та пасивних завад після обчислення модулів у пристрої 12 надходять до виявлювача корисних сигналів 14, де, з врахуванням енергетичних та спектральних ознак в кожному дискреті дальності, виконується виявлення корисних сигналів із суміші сигналів, які оброблялися в пристрої просторово-часової обробки 5. Прийнята суміш сигналів та завад, яка надходить на входи основного 9 та компенсаційного 8 багатоканальних фазових фільтрів, також розділяється за спектральними ознаками. При цьому також забезпечується когерентне міжперіодне накопичення корисних сигналів. Сигнали з виходів основного багатоканального фазового фільтра 9 надходять на основні входи автокомпенсатора завад 11. Сигнали з виходу компенсаційного багатоканального фазового фільтра 8 надходять на компенсаційні входи автокомпенсатора завад 11, де регулюються по амплітуді та фазі та додаються до відповідних сигналів, які надходять на основний вхід автокомпенсатора завад 11. Вагові коефіцієнти автокомпенсатора завад 11 обраховують з використанням вихідних сигналів багатоканальних фазових фільтрів 8 та 9 з номерами N/2. Останнє надає можливість певним чином зменшити вплив пасивної завади на формування вагових коефіцієнтів автокомпенсатора завад 11. Після компенсації активної завади вихідні сигнали з автокомпенсатора завад 11 через обчислювачі модулів 13 надходять до виявлювача корисних сигналів 16, де, з врахуванням енергетичних та спектральних ознак в кожному дискреті дальності, виконується виявлення корисних сигналів із суміші, яка оброблялась в пристрої часово-просторової обробки. Виявлені у пристроях 14 та 16 корисні сигнали через пристрій суміщення інформації 15 надходять на монітор 17. Паралельна обробка сигналів з використанням просторово-часової 5 та часово-просторової 6 обробки оптимізує роботу когерентно-імпульсного радіолокатора. Так, на кутах місця чи на азимутах, де діє тільки активна завада, або на інтервалах дальності, де активна завада суттєво переважає пасивну, просторово-часова обробка 5 забезпечить на входах виявлювача корисних сигналів 14 більш високе значення відношення сигнал/завада ніж на вході виявлювача 16 часово-просторової обробки. Це обумовлено тим, що при просторово-часовій обробці сигналів адаптація вагових коефіцієнтів автокомпенсатора виконується в межах одного періоду повторення імпульсів. Адаптація вагових коефіцієнтів автокомпенсатора завад 11 при часовопросторовій обробці виконується міжпачково (один раз за частотну пачку). При скануванні антенної системи радіолокатора це суттєво обмежує якість компенсації активної завади [3, 4]. На інтервалах дальності, де пасивна завада перевищує активну, більш високе значення сигнал/завада на входах виявлювача корисних сигналів 16 забезпечить пристрій часовопросторової обробки 6. Тому застосування способу, що пропонується, за рахунок використання позитивних переваг як просторово-часової, так і часово-просторової обробки сигналів суттєво підвищить функціональні можливості когерентно-імпульсних радіолокаторів в умовах дії комбінованих завад. Джерела інформації: 1. Пат. 78120 Україна, МПК G01S7/36, Н04В15/00. Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад [Текст] /Шза Д.М., Сіренко А.С.; заявник і патентовласник Запорізький національний технічний університет. - №и201210218; Заявл. 2012.08.28; Опубл. 2013.03. 11, Бюл. № 5/2013 р. - 7с. 2. Пат. 48705 Україна, МПК G01S7/36, Н04В15/00. Спосіб компенсації активної складової комбінованої завади [Текст] /Кононович В.Я., Кукольницький А.П., Залевський О.П., Каспирович О.Г.; Майстер Ю.Л., Денека А.А.; заявник і патентовласник Казенне підприємство "Наукововиробничий комплекс "Іскра".- № и200911296; Заявл. 2009.11.06; Опубл. 2010.03.25, Бюл. №6, 2010 р. - 4с. 3. Рябуха В.П., Рачков Д.С., Семеняка А.В., Катюшин Е.А. Оценка интервала фиксации пространственного весового вектора при последовательной пространственно-временной обработке сигналов на фоне комбинированных помех [Текст] / В.П. Рябуха, Д.С. Рачков, А.В. Семеняка, Е.А. Катюшин // Известия высших учебных заведений. Радиоэлектроника. - 2012. №10. - С. 13-25. 4. Пиза Д.М., Звягинцев Э.А. Анализ влияния переменной базы на качество подавления помех при время-пространственной обработке сигналов [Текст] / Д.М. Пиза, Э.А. Звягинцев// Радиоэлектроника, информатика, управление. - 2014. - № 2. - С. 51-44. 5. Пат. 89945 Україна, МПК G01S7/36, Н04В15/00. Спосіб завадозахисту когерентноімпульсної рлс від комбінованих завад [Текст] /Піза Д.М., Залевський О.П.; заявник і патентовласник Запорізький національний технічний університет. - № и201312010; Заявл. 2013.10.14; Опубл. 2014.05. 12, Бюл. № 9/2014 р. - 5с. 3 UA 106573 U 5 6. Устройство компенсации активных помех [Текст]: пат. 2444751 Рос. Федерация: МПК G01S7/36 / Анохин В.Д., Симохамед Ф., Анохин Е.В., Кильдюшевская В.Г.; заявитель и патентообладатель: Федеральное государственное образовательное учреждение высшего профессионального образования "Военный авиационный инженерный университет" (г. Воронеж) Министерства обороны Российской Федерации; заявл. 10.03.2009, опубл.10.03.2012, Бюл. № XXX. - 5 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 Спосіб захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад з пачковою модуляцією частоти повторення зондуючих імпульсів від комбінованих завад, в якому проводиться фазова (часова) та поляризаційна або просторова фільтрація, який відрізняється тим, що часово-просторову (часово-поляризаційну) та просторово-часову (поляризаційночасову) обробку сигналів в кожному дискреті дальності виконують паралельно, для чого прийняті основним та компенсаційним каналами сигнали поділяють та подають як на пристрій часово-просторової (часово-поляризаційної), так і на пристрій просторово-часової (поляризаційно-часової) обробки сигналів, в яких компенсують активну шумову заваду та виконують часову (фазову) фільтрацію; після цього в кожному фільтровому каналі обчислюють модуль, виявляють корисні сигнали на фоні пасивних завад як після часово-просторової, так і після просторово-часової обробки та відображають виявлені цілі на моніторі радіолокатора. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for interference protection of a coherent pulsed radar from combined interferences
Автори англійськоюPiza Dmytro Makarovych
Назва патенту російськоюСпособ помехозащиты когерентных импульсных рлс от комбинированных помех
Автори російськоюПиза Дмитрий Макарович
МПК / Мітки
МПК: H04B 15/00, G01S 7/36
Мітки: комбінованих, рлс, завад, завадозахисту, спосіб, когерентно-імпульсної
Код посилання
<a href="https://ua.patents.su/6-106573-sposib-zavadozakhistu-kogerentno-impulsno-rls-vid-kombinovanikh-zavad.html" target="_blank" rel="follow" title="База патентів України">Спосіб завадозахисту когерентно-імпульсної рлс від комбінованих завад</a>
Спосіб завадозахисту когерентно-імпульсної рлс від комбінованих завад
Номер патенту: 89945
Опубліковано: 12.05.2014
Автори: Піза Дмитро Макарович, Залевський Олексій Павлович
МПК: H04B 15/00, G01S 7/36
Мітки: когерентно-імпульсної, завадозахисту, завад, комбінованих, рлс, спосіб
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій з пачковою модуляцією частоти повторення зондуючих імпульсів від комбінованих завад в якому, проводиться фазова (часова) та поляризаційна або просторова фільтрація, який відрізняється тим, що послідовність проведення фазової та поляризаційної фільтрації залежить від співвідношення рівнів потужності активної та пасивної складової комбінованої завади, яке визначається у аналізаторі...
Спосіб захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад
Номер патенту: 59472
Опубліковано: 10.05.2011
Автори: Рудик Олександр Володимирович, Залевський Олексій Павлович, Піза Дмитро Макарович
МПК: G01S 7/36, H04B 15/00
Мітки: когерентно-імпульсної, спосіб, комбінованих, станції, завад, захисту, радіолокаційної
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагових коефіцієнтів поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та...
Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад
Номер патенту: 78120
Опубліковано: 11.03.2013
Автори: Піза Дмитро Макарович, Сіренко Андрій Сергійович
МПК: H04B 15/00, G01S 7/36
Мітки: спосіб, завад, станцій, захисту, когерентно-імпульсних, радіолокаційних, комбінованих
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій (РЛС) від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагового коефіцієнту поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигналі на тлі пасивних завад та...
Спосіб захисту радіолокаторів від комбінованих завад, діючих по головному променю діаграми спрямованості антени
Номер патенту: 91114
Опубліковано: 25.06.2014
Автори: Сіренко Андрій Сергійович, Звягінцев Євген Олександрович, Піза Дмитро Макарович
МПК: G01S 7/36, H04B 15/00
Мітки: завад, комбінованих, спосіб, спрямованості, антени, діаграми, радіолокаторів, головному, захисту, діючих, променю
Формула / Реферат:
Спосіб захисту радіолокаторів від комбінованих завад, діючих по головному променю діаграми спрямованості антени, за яким основним та компенсаційним каналами радіолокатора приймають корисні сигнали та завади, які діють по головному променю діаграми спрямованості антени, компенсують активну шумову задачу шляхом регулювання вагових коефіцієнтів поляризаційного фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням...
Спосіб захисту когерентно-імпульсних радіолокаційних станцій від активних завад
Номер патенту: 103177
Опубліковано: 10.12.2015
Автори: Мейстер Юрій Лазорович, Денека Анатолій Анатолійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Геннадійович, Аршинніков Віталій Володимирович, Залевський Олексій Павлович
МПК: H04B 15/00, G01S 7/36
Мітки: спосіб, когерентно-імпульсних, станцій, захисту, радіолокаційних, активних, завад
Формула / Реферат:
Спосіб захисту когерентно-імпульсних РЛС від активних завад, який полягає в послідовному проведенні просторової фільтрації, елементом адаптації якої є автокомпенсатор завад, і частотної фільтрації, яку виконують за допомогою пристрою когерентної обробки, який відрізняється тим, що активну заваду приглушують за допомогою автокомпенсатора завад в часовій чи частотній області, при цьому на тих інтервалах дальності, де середньоквадратичні...
Попередній патент: Спосіб отримання декоративного зображення
Наступний патент: Кожухотрубний теплообмінник
Випадковий патент: Спосіб виробництва рідкої яєчно-молочної суміші для приготування омлетів "омлет рідкий"