Спосіб захисту когерентно-імпульсних радіолокаційних станцій від активних завад
Номер патенту: 103177
Опубліковано: 10.12.2015
Автори: Каспирович Олександр Геннадійович, Денека Анатолій Анатолійович, Залевський Олексій Павлович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Аршинніков Віталій Володимирович, Мейстер Юрій Лазорович
Формула / Реферат
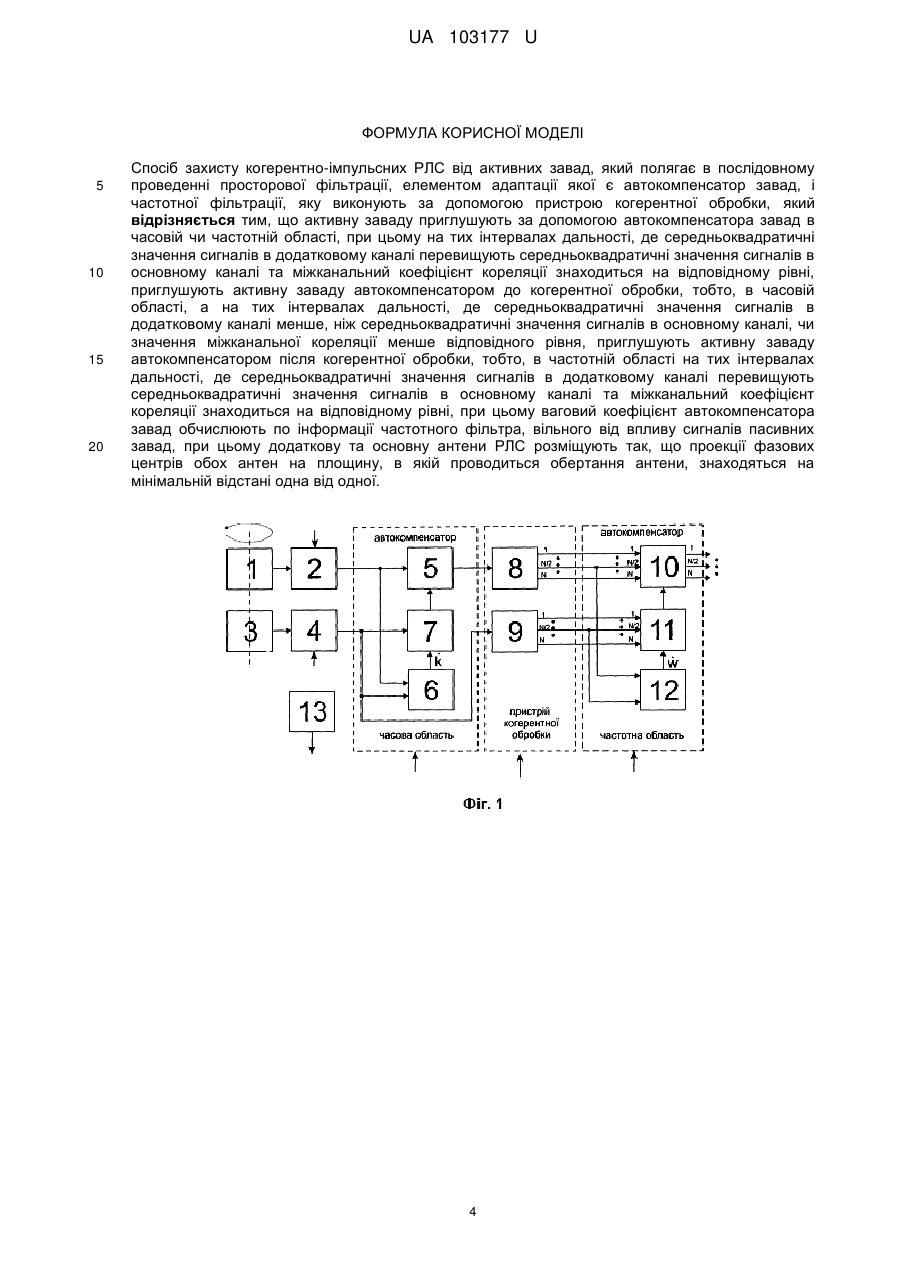
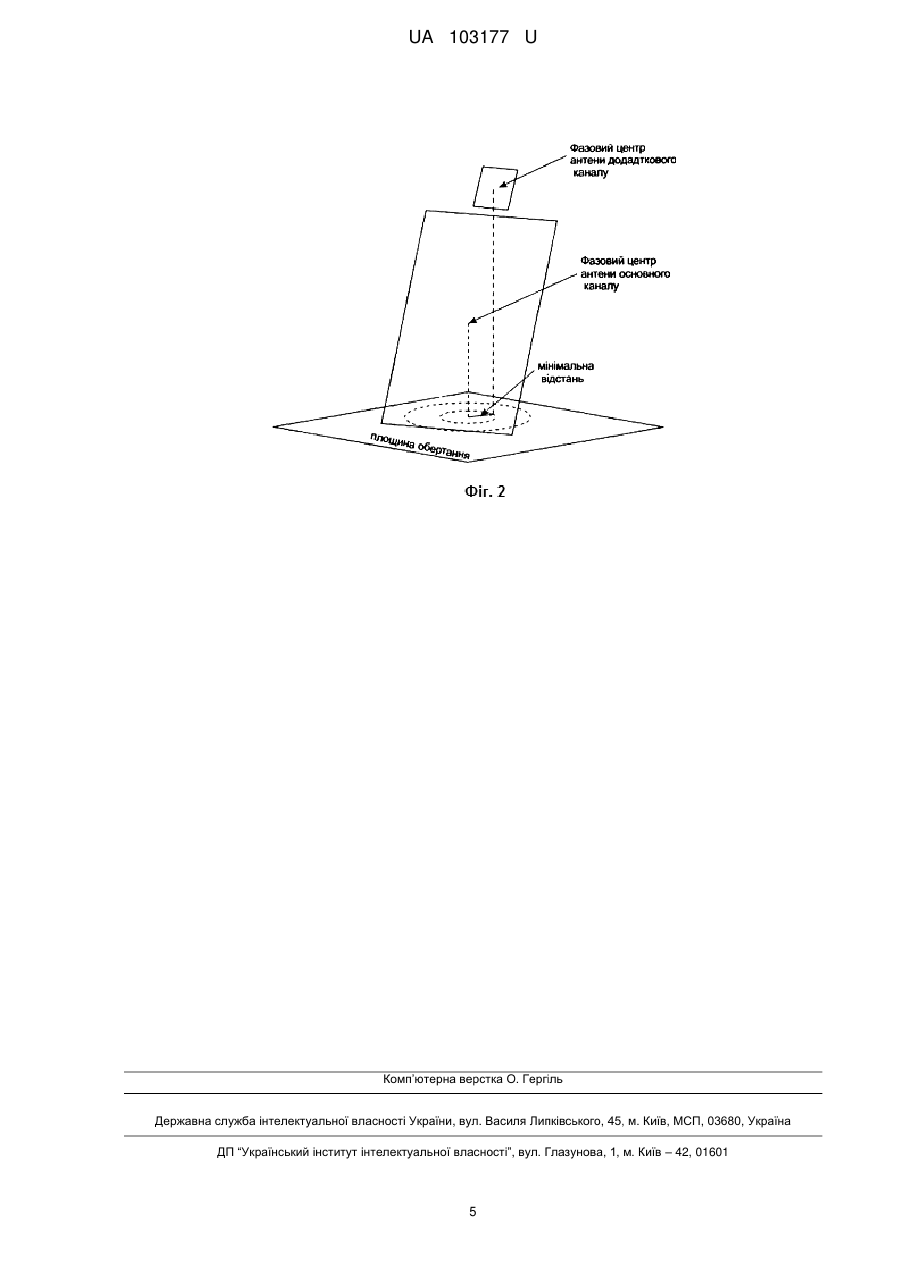
Спосіб захисту когерентно-імпульсних РЛС від активних завад, який полягає в послідовному проведенні просторової фільтрації, елементом адаптації якої є автокомпенсатор завад, і частотної фільтрації, яку виконують за допомогою пристрою когерентної обробки, який відрізняється тим, що активну заваду приглушують за допомогою автокомпенсатора завад в часовій чи частотній області, при цьому на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі перевищують середньоквадратичні значення сигналів в основному каналі та міжканальний коефіцієнт кореляції знаходиться на відповідному рівні, приглушують активну заваду автокомпенсатором до когерентної обробки, тобто, в часовій області, а на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі менше, ніж середньоквадратичні значення сигналів в основному каналі, чи значення міжканальної кореляції менше відповідного рівня, приглушують активну заваду автокомпенсатором після когерентної обробки, тобто, в частотній області на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі перевищують середньоквадратичні значення сигналів в основному каналі та міжканальний коефіцієнт кореляції знаходиться на відповідному рівні, при цьому ваговий коефіцієнт автокомпенсатора завад обчислюють по інформації частотного фільтра, вільного від впливу сигналів пасивних завад, при цьому додаткову та основну антени РЛС розміщують так, що проекції фазових центрів обох антен на площину, в якій проводиться обертання антени, знаходяться на мінімальній відстані одна від одної.
Текст
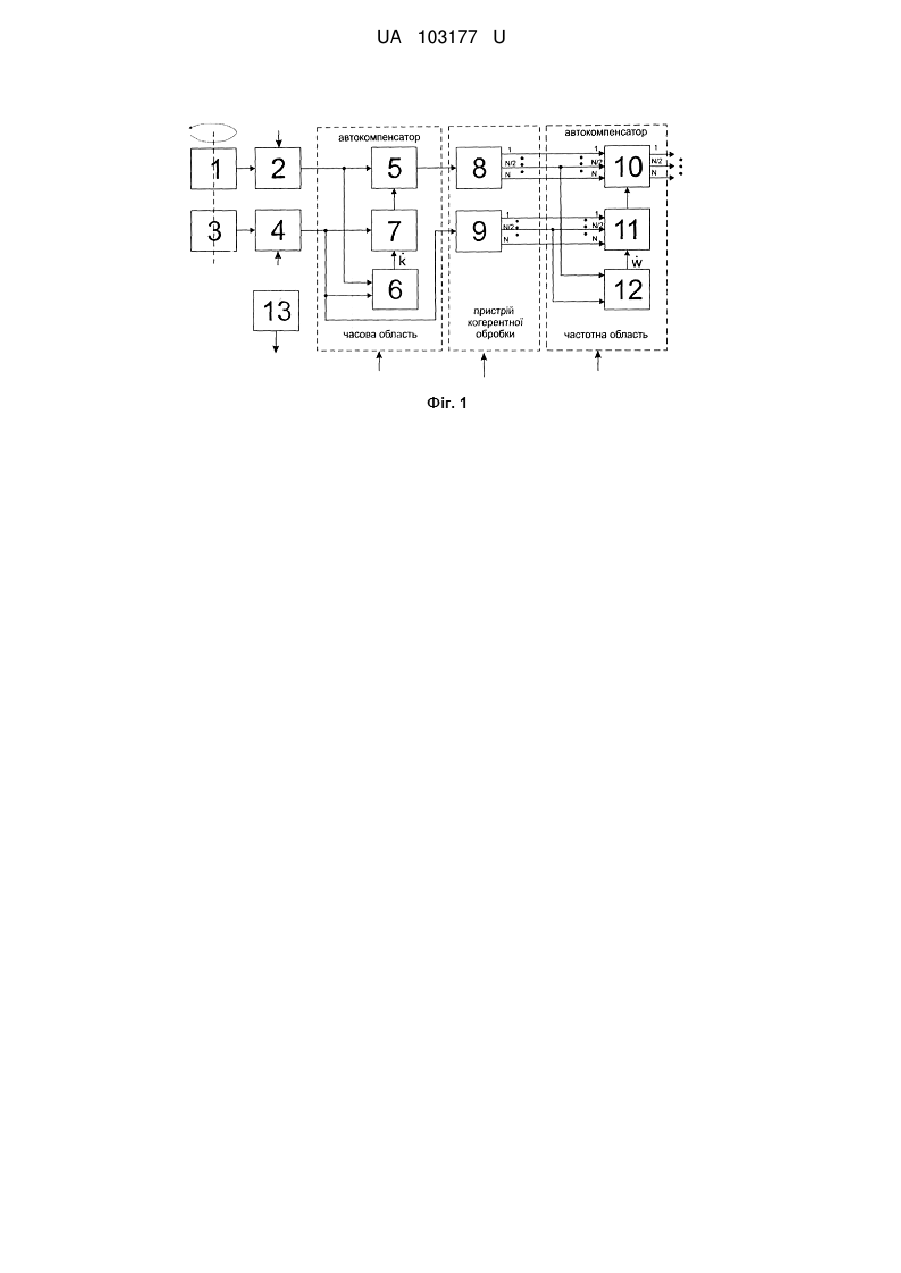
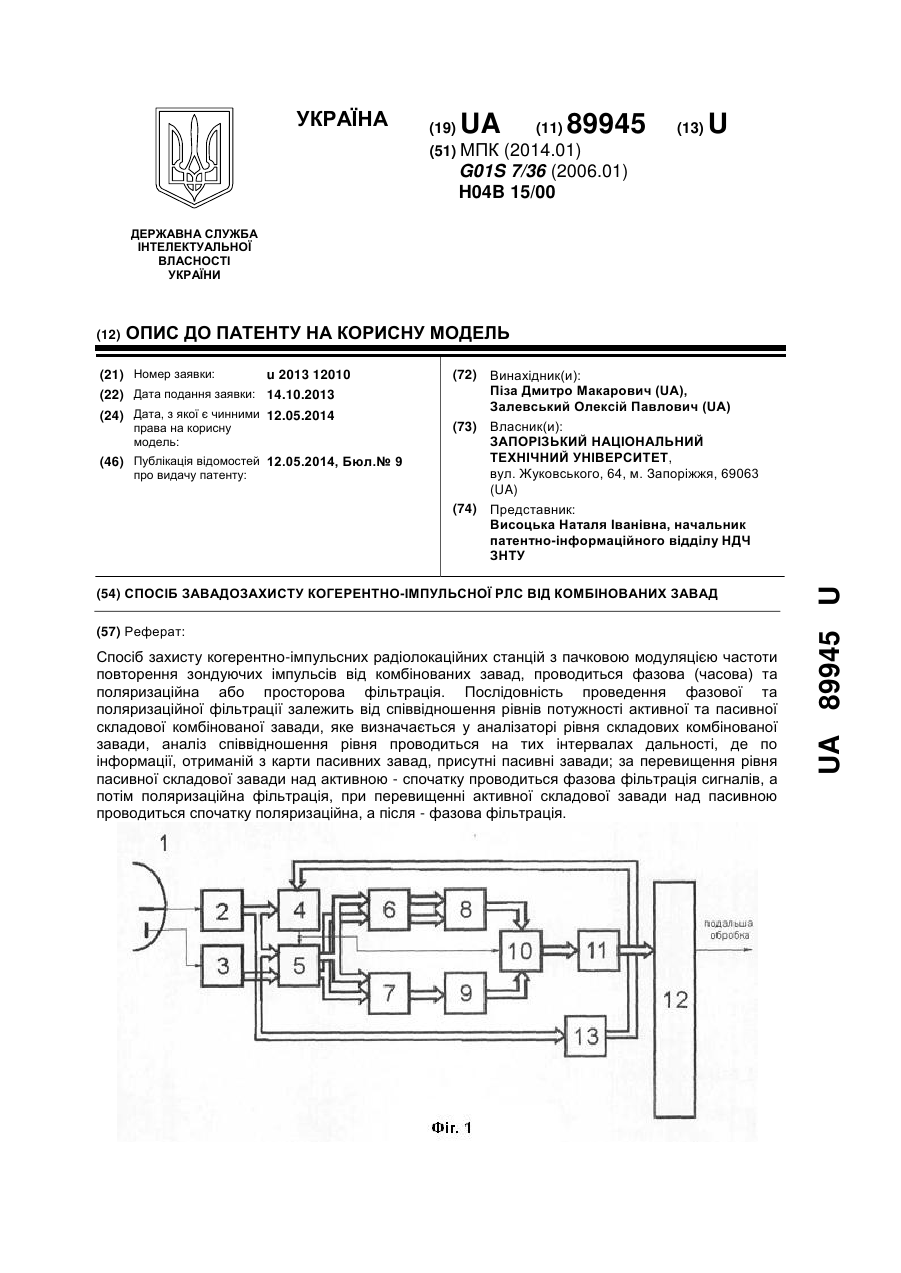
Реферат: Спосіб захисту когерентно-імпульсних РЛС від активних завад полягає в послідовному проведенні просторової фільтрації, елементом адаптації якої є автокомпенсатор завад, і частотної фільтрації, яку виконують за допомогою пристрою когерентної обробки. Активну заваду приглушують за допомогою автокомпенсатора завад в часовій чи частотній області, при цьому на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі перевищують середньоквадратичні значення сигналів в основному каналі та міжканальний коефіцієнт кореляції знаходиться на відповідному рівні, приглушують активну заваду автокомпенсатором до когерентної обробки, тобто, в часовій області, а на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі менше, ніж середньоквадратичні значення сигналів в основному каналі, чи значення міжканальної кореляції менше відповідного рівня, приглушують активну заваду автокомпенсатором після когерентної обробки, тобто, в частотній області на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі перевищують середньоквадратичні значення сигналів в основному каналі та міжканальний коефіцієнт кореляції знаходиться на відповідному рівні, при цьому ваговий коефіцієнт автокомпенсатора завад обчислюють по інформації частотного фільтра, вільного від впливу сигналів пасивних завад, при цьому додаткову та основну антени РЛС розміщують так, що проекції фазових центрів обох антен на площину, в якій проводиться обертання антени, знаходяться на мінімальній відстані одна від одної. UA 103177 U (12) UA 103177 U UA 103177 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до радіолокації і може бути використана для підвищення завадозахищеності когерентно-імпульсних радіолокаторів в умовах одночасної дії пасивних та активних шумових завад. Відомий спосіб компенсації активної складової комбінованої завади в когерентно-імпульсних РЛС, згідно з яким на першому етапі фільтрації проводять часову (частотну), а на другому етапі - просторову (поляризаційну) фільтрацію (патент України на корисну модель № 48705 від 25.03.2010, МПК G01S 7/36, Н04В 15/00, опублікований 25.03.2010, бюл. №6). Особливістю цього способу є те, що формування вагового коефіцієнта відбувається у межах поточного інтервалу когерентного накопичення по інформації фазового (частотного) фільтра, який найдальше відстоїть від фазових (частотних) фільтрів, що можуть містити сигнали пасивних завад, а компенсація активної складової комбінованої завади в межах частотної пачки виконується з використанням адаптивного вагового коефіцієнта, що був сформований в тій же самій частотній пачці. Суттєвим недоліком цього способу є те, що при впливі активної завади на когерентноімпульсну РЛС кругового огляду, обертання антен РЛС призводить до зміни міжканальних амплітудно-фазових співвідношень сигналів завад протягом інтервалу когерентного накопичення. Зміна амплітудно-фазових співвідношень обумовлена інтерференцією сигналів та рознесенням фазових центрів антен основного та додаткового каналів відносно осі обертання. Зміна амплітудно-фазових співвідношень на інтервалі когерентного накопичення не дозволяє розрахувати оптимальний ваговий коефіцієнт для повного приглушення активної завади в просторовому фільтрі за інформацією часового (частотного) фільтра. Найбільш близьким по суті до способу, що заявляється, є спосіб, суть якого полягає в тому, що на першому ступені фільтрації проводиться просторова фільтрація, а на другому ступені часова (частотна) фільтрація. При цьому використання просторової фільтрації на першому ступені фільтрації забезпечує приглушення завадових сигналів (активної складової комбінованої завади), що не співпадають з напрямком приходу корисного сигналу. Часова (частотна) фільтрація дозволяє виділяти корисні сигнали на фоні комбінованих завад за допомогою різниці частот, тобто виділяти корисні сигнали на фоні пасивної складової комбінованої завади (В.Г. Григорьев "Комбинированная обработка сигналов в системах радиосвязи". -М: Эко-Трендз, 2002 г., 262 с.). Недоліком цього способу є зменшення ефективності приглушення активних і виділення корисних сигналів на фоні пасивних завад, що обумовлено спотворенням спектрів прийнятих корисних сигналів та завад під час роботи просторового (поляризаційного) фільтра. Зменшення ефективності приглушення активної завади обумовлене потраплянням сигналів пасивних завад в ланцюги формування вагового коефіцієнта просторового фільтра. В основу способу, що пропонується, поставлено задачу підвищення ефективності захисту когерентно-імпульсних РЛС від впливу активної завади, яка діє по бокових пелюстках діаграми спрямованості основної антени РЛС, та від впливу пасивної завади. Запропонований спосіб забезпечує високу ефективність приглушення активних шумових завад та виділення корисних сигналів на фоні пасивних завад. Вирішення цієї задачі досягається тим, що у способі захисту когерентно-імпульсних РЛС від активних завад, який полягає в послідовному проведенні просторової фільтрації, елементом адаптації якої є автокомпенсатор завад, і частотної фільтрації, яку виконують за допомогою пристрою когерентної обробки, активну заваду приглушують за допомогою автокомпенсатора завад в часовій чи частотній області, при цьому на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі перевищують середньоквадратичні значення сигналів в основному каналі та міжканальний коефіцієнт кореляції знаходиться на відповідному рівні, приглушують активну заваду автокомпенсатором до когерентної обробки, тобто, в часовій області, а на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі менше, ніж середньоквадратичні значення сигналів в основному каналі, чи значення міжканальної кореляції менше відповідного рівня, приглушують активну заваду автокомпенсатором після когерентної обробки, тобто, в частотній області на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі перевищують середньоквадратичні значення сигналів в основному каналі та міжканальний коефіцієнт кореляції знаходиться на відповідному рівні, при цьому ваговий коефіцієнт автокомпенсатора завад обчислюють по інформації частотного фільтра, вільного від впливу сигналів пасивних завад, при цьому додаткову та основну антени РЛС розміщують так, що проекції фазових центрів обох антен на площину, в якій проводиться обертання антени, знаходяться на мінімальній відстані одна від одної. 1 UA 103177 U 5 10 15 20 25 30 35 40 45 50 55 60 Причинно-наслідковий зв'язок між сукупністю ознак корисної моделі і технічним результатом полягає в наступному. Завдяки тому, що активну заваду приглушують за допомогою автокомпенсатора завад в часовій чи частотній області, при цьому на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі перевищують середньоквадратичні значення сигналів в основному каналі та міжканальний коефіцієнт кореляції знаходиться на відповідному рівні, приглушують активну заваду автокомпенсатором до когерентної обробки, тобто, в часовій області, а на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі менше, ніж середньоквадратичні значення сигналів в основному каналі, чи значення міжканальної кореляції менше відповідного рівня, приглушують активну заваду автокомпенсатором після когерентної обробки, тобто, в частотній області на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі перевищують середньоквадратичні значення сигналів в основному каналі та міжканальний коефіцієнт кореляції знаходиться на відповідному рівні, при цьому ваговий коефіцієнт автокомпенсатора завад обчислюють по інформації частотного фільтра, вільного від впливу сигналів пасивних завад, при цьому додаткову та основну антени РЛС розміщують так, що проекції фазових центрів обох антен на площину, в якій проводиться обертання антени, знаходяться на мінімальній відстані одна від одної, спосіб, що заявляється, підвищує ефективність захисту когерентно-імпульсних РЛС від впливу активної завади, яка діє по бокових пелюстках діаграми спрямованості основної антени РЛС, та від впливу пасивної завади, забезпечує високу ефективність приглушення активних шумових завад та виділення корисних сигналів на фоні пасивних завад. Особливістю способу є те, що запропоноване взаємне розміщення основної та додаткової антен дозволяє зменшити міжканальні фазові розбіжності, що виникають на інтервалі когерентного накопичення при обертанні антен. Приглушення активних завад проводять автокомпенсаторами в часовій чи частотній області (після когерентної обробки), в залежності від співвідношення рівня сигналів в додатковому і основному приймальних каналах та ступеня їх міжканальної кореляції, що дозволяє ефективно приглушувати активні та виділяти корисні сигнали на фоні пасивних завад. У порівнянні з прототипом відмінною ознакою є те, що у запропонованому способі використовуються умови розміщення основної та додаткової антени відносно осі обертання та використання автокомпенсатора в часовій чи в частотній області, в залежності від співвідношення рівня сигналів в додатковому і основному приймальних каналах та ступеня їх міжканальної кореляції. Використання такого способу дозволяє забезпечити високу ефективність компенсації активної завади та ефективне виявлення корисних сигналів на фоні пасивної складової. У технічному рішенні, що заявляється, нові технічні ознаки при взаємодії з відомими дають новий технічний результат, що дозволяє вирішити поставлене завдання. Суть способу, що заявляться, пояснюється кресленнями, де на фіг. 1 зображено структурну схему РЛС, в якій використано пропонований спосіб, а на фіг. 2 - розміщення антен основного та додаткового каналів. В процесі сканування антеною 1 приймаються зондуючі сигнали, що були відбиті від цілей, заважаючих об'єктів, та шумові завади. Сигнали, прийняті антеною основного каналу 1, надходять на вхід основного приймального каналу 2, а сигнали, що були прийняті антеною додаткового каналу 3, надходять на вхід додаткового (компенсаційного) приймального каналу 4. Антени основного та додаткового каналів розміщено таким чином, що проекції фазових центрів антен на площину обертання знаходяться на мінімальній відстані одна від одної, як показано на фіг. 2. Таке розміщення антен обумовлене тим, що необхідно забезпечити мінімальні міжканальні фазові розбіжності на інтервалі когерентного накопичення для ефективного приглушення активних завад. Основний та додатковий приймальні канали 2 та 4 мають однакову структуру. З виходу основного приймального каналу 2 отримані дані кожного дискрету дальності передаються на один із входів суматора 5 і одночасно на один із входів обчислювача вагових коефіцієнтів 6. На другий вхід обчислювача вагових коефіцієнтів 6 надходять дані кожного дискрету дальності з виходу приймача додаткового приймального каналу 4. Пристрій обчислення вагових коефіцієнтів 6 обчислює середньоквадратичні значення даних додаткового і основного каналів, міжканальний коефіцієнт кореляції та ваговий коефіцієнт для компенсації активної завади на декількох інтервалах дальності. На тих інтервалах дальності, де розраховані середньоквадратичні значення додаткового каналу перевищують середньоквадратичні значення основного каналу, та міжканальний коефіцієнт кореляції знаходиться на відповідному рівні, обчислюють ваговий коефіцієнт k по інформації основного та додаткового каналів, а 2 UA 103177 U 5 отримані значення вагових коефіцієнтів застосовують для відповідних відрізків дальності поточного періоду повторення, де були виконані ці умови. Ці інтервали дальності відповідають тим інтервалам дальності, на яких відсутні потужні пасивні завади. В іншому випадку, на тих інтервалах дальності, де присутні потужні пасивні завади, тобто середньоквадратичні значення в додатковому каналі не перевищують середньоквадратичні значення в основному каналі, чи міжканальний коефіцієнт кореляції менше порогового рівня, 10 15 20 25 30 35 40 45 50 55 значення розрахованого вагового коефіцієнта k прирівнюють до нульового значення (k 0) , при цьому в суматорі 5 компенсація активної завади не проводиться. Це обумовлено тим, що наявність потужних пасивних завад на інтервалах адаптації вагового коефіцієнта k в автокомпенсаторі призводить до спотворення його значення, що, в свою чергу, веде до зменшення ефективності приглушення активної завади в суматорі 5. Крім того, при компенсації активної завади в суматорі 5 спектри потужних пасивних завад будуть спотворюватись, що призводить до зменшення ефективності виділення корисних сигналів на фоні пасивних завад в наступних пристроях. Обчислення вагового коефіцієнта k в пристрої обчислення вагових коефіцієнтів 6 проводять в кожному періоді повторення по інформації поточного періоду. Отримане значення вагового коефіцієнта k надходить на один із входів помножувача 7, на другий вхід якого надходять дані дискретів дальності поточного періоду повторення з виходу додаткового приймального каналу 4. В суматорі 5 проводиться додавання даних основного каналу до даних додаткового каналу, які були зважені ваговим коефіцієнтом k . При ваговому коефіцієнті k який не дорівнює нулю, відбувається компенсація активної завади, за умови k 0 компенсація не відбувається. Звиходу суматора 5 інформація кожного дискрета дальності надходить до пристрою когерентної обробки основного каналу 8. З виходу додаткового приймального каналу 4 інформація про всі дискрети дальності надходить до пристрою когерентної обробки 9. В пристроях 8 та 9 проводять когерентну обробку інформації, що дає можливість накопичувати пасивні завади та корисні сигнали у відповідних частотних (фазових) фільтрах. Когерентну обробку можливо виконувати за алгоритмом дискретного перетворення Фур'є. Виходи N частотних фільтрів пристрою когерентної обробки основного каналу 8 підключені до відповідних N входів суматора 10. Виходи N частотних фільтрів пристрою когерентної обробки додаткового каналу 9 підключені до N відповідних входів помножувача 11, а вихід N/2 фільтра додатково підключений до пристрою обчислення вагових коефіцієнтів 12. Пристрій обчислення вагових коефіцієнтів 12 проводить обчислення середньоквадратичних значень по інформації N/2 частотного фільтра (що не містить сигналів пасивних завад) додаткового і основного каналів та міжканальний коефіцієнт кореляції на тих же інтервалах дальності, що і пристрій 6, але по інформації фільтра, що не містить сигналів пасивних завад. На тих інтервалах дальності, де середньоквадратичне значення в додатковому каналі перевищує значення в основному, обчислюють коефіцієнт міжканальної кореляції, і, якщо значення цього коефіцієнта перевищує відповідне значення порогу, обчислюють ваговий коефіцієнт w . Інтервали, де середньоквадратичні значення в додатковому каналі перевищують значення в основному та коефіцієнт міжканальної кореляції перевищує значення порогу, відповідають тим інтервалам, на яких містяться потужні пасивні завади та на яких не було зкомпенсовано активну заваду в суматорі 5, і де необхідно проводити компенсацію завади. На тих інтервалах дальності, де середньоквадратичне значення в додатковому каналі не перевищує значення в основному каналі, чи коефіцієнт кореляції менше порогового значення, ваговий коефіцієнт w прирівнюється до нуля ( w 0) та не проводиться компенсація. Ці інтервали відповідають тим інтервалам, де активна завада була зкомпенсована в суматорі 5, чи азимутальним кутам, на яких напрям приймання активної завади співпадає з напрямом головного променя діаграми спрямованості основної антени. Значення вагового коефіцієнта w з виходу пристрою обчислення вагових коефіцієнтів 12 надходить на другий вхід помножувача 11. Помножувач 11 проводить множення вагового коефіцієнта w на відповідні значення кожного дискрета дальності кожного частотного фільтра додаткового каналу відповідного інтервалу дальності, а отримана інформація з виходу помножувача 11 надходить на другий вхід суматора 10. В суматорі 10 проводиться компенсація залишків активної завади в кожному частотному фільтрі на відповідних інтервалах шляхом додавання інформації відповідних частотних фільтрів додаткового каналу, які були зважені ваговим коефіцієнтом w , до інформації основного каналу. З виходу суматора 10 інформація надходить на подальшу обробку. Пристрій синхронізації 13 забезпечує синхронність роботи всіх пристроїв. 3 UA 103177 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 Спосіб захисту когерентно-імпульсних РЛС від активних завад, який полягає в послідовному проведенні просторової фільтрації, елементом адаптації якої є автокомпенсатор завад, і частотної фільтрації, яку виконують за допомогою пристрою когерентної обробки, який відрізняється тим, що активну заваду приглушують за допомогою автокомпенсатора завад в часовій чи частотній області, при цьому на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі перевищують середньоквадратичні значення сигналів в основному каналі та міжканальний коефіцієнт кореляції знаходиться на відповідному рівні, приглушують активну заваду автокомпенсатором до когерентної обробки, тобто, в часовій області, а на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі менше, ніж середньоквадратичні значення сигналів в основному каналі, чи значення міжканальної кореляції менше відповідного рівня, приглушують активну заваду автокомпенсатором після когерентної обробки, тобто, в частотній області на тих інтервалах дальності, де середньоквадратичні значення сигналів в додатковому каналі перевищують середньоквадратичні значення сигналів в основному каналі та міжканальний коефіцієнт кореляції знаходиться на відповідному рівні, при цьому ваговий коефіцієнт автокомпенсатора завад обчислюють по інформації частотного фільтра, вільного від впливу сигналів пасивних завад, при цьому додаткову та основну антени РЛС розміщують так, що проекції фазових центрів обох антен на площину, в якій проводиться обертання антени, знаходяться на мінімальній відстані одна від одної. 4 UA 103177 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for protecting coherent pulse radar from active interference
Автори англійськоюArshynnikov Vitalii Volodymyrovych, Deneka Anatolii Anatoliyovych, Zalevskyi Oleksii Pavlovych, Kaspyrovych Oleksandr Gennadiyovych, Kononovych Viktor Yakovych, Meister Iurii Lazorovych
Назва патенту російськоюСпособ защиты когерентно-импульсныхрадиолокационных станций от активныхпомех
Автори російськоюАршинников Виталий Владимирович, Денека Анатолий Анатолиевич, Залевський Алексей Павлович, Каспирович Александр Геннадиевич, Кононович Виктор Яковлевич, Мейстер Юрий Лазорович
МПК / Мітки
МПК: H04B 15/00, G01S 7/36
Мітки: когерентно-імпульсних, активних, завад, спосіб, захисту, радіолокаційних, станцій
Код посилання
<a href="https://ua.patents.su/7-103177-sposib-zakhistu-kogerentno-impulsnikh-radiolokacijjnikh-stancijj-vid-aktivnikh-zavad.html" target="_blank" rel="follow" title="База патентів України">Спосіб захисту когерентно-імпульсних радіолокаційних станцій від активних завад</a>
Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад
Номер патенту: 78120
Опубліковано: 11.03.2013
Автори: Піза Дмитро Макарович, Сіренко Андрій Сергійович
МПК: H04B 15/00, G01S 7/36
Мітки: станцій, захисту, когерентно-імпульсних, завад, радіолокаційних, комбінованих, спосіб
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій (РЛС) від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагового коефіцієнту поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигналі на тлі пасивних завад та...
Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурою
Номер патенту: 78101
Опубліковано: 11.03.2013
Автори: Харланов Олексій Володимирович, Поповнін Юрій Михайлович
МПК: G01S 7/36
Мітки: система, завад, корабельних, структурою, просторово-поляризаційною, радіолокаційних, адаптивна, повітряних, повільною, цілей, активних, захисту, станцій, шумових, виявлення
Формула / Реферат:
Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурую, яка складається: з цифрової антенної решітки (1) з біортогональними елементами, складові яких настроєні на прийом вертикально (2) й горизонтально (3) поляризованих електромагнітних хвиль відповідно; двох просторових адаптивних фільтрів (11), які пов'язані зі складовими антенних...
Спосіб захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад
Номер патенту: 59472
Опубліковано: 10.05.2011
Автори: Піза Дмитро Макарович, Рудик Олександр Володимирович, Залевський Олексій Павлович
МПК: H04B 15/00, G01S 7/36
Мітки: когерентно-імпульсної, радіолокаційної, захисту, станції, комбінованих, спосіб, завад
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагових коефіцієнтів поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та...
Пристрій для захисту від активних завад
Номер патенту: 19475
Опубліковано: 15.12.2006
Автори: ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Громаковський Володимир Васильович, Піза Дмитро Макарович
МПК: G01S 1/00
Мітки: пристрій, активних, захисту, завад
Формула / Реферат:
Пристрій для захисту від активних завад, що містить гостронаправлену антену, допоміжну ненаправлену антену, основний і компенсаційний канали прийому, блок автокомпенсатора, перший вхід якого з'єднаний з виходом приймача основного каналу прийому, другий вхід автокомпенсатора з'єднаний через підсилювальний блок з виходом приймача компенсаційного каналу прийому, який відрізняється тим, що в каналах прийому введені блок нормування вхідного...
Спосіб завадозахисту когерентно-імпульсної рлс від комбінованих завад
Номер патенту: 89945
Опубліковано: 12.05.2014
Автори: Залевський Олексій Павлович, Піза Дмитро Макарович
МПК: H04B 15/00, G01S 7/36
Мітки: завад, рлс, спосіб, когерентно-імпульсної, завадозахисту, комбінованих
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій з пачковою модуляцією частоти повторення зондуючих імпульсів від комбінованих завад в якому, проводиться фазова (часова) та поляризаційна або просторова фільтрація, який відрізняється тим, що послідовність проведення фазової та поляризаційної фільтрації залежить від співвідношення рівнів потужності активної та пасивної складової комбінованої завади, яке визначається у аналізаторі...
Попередній патент: Спосіб оцінки ефективності лікування хворих з гастроентерологічними захворюваннями
Наступний патент: Спосіб пневмопресингового лікування порушення функцій органів черевної порожнини
Випадковий патент: Ригель