Спосіб виявлення аномальних вимірювань апаратури супутникової навігації на борту космічного апарата
Номер патенту: 109958
Опубліковано: 26.09.2016
Автори: Кухарський Ігор Андрійович, Ракушев Михайло Юрійович

Формула / Реферат
1. Спосіб виявлення аномальних вимірювань апаратури супутникової навігації на борту космічного апарата, що включає виявлення на борту космічного апарата аномальних вимірювань, отриманих від апаратури супутникової навігації, на основі перевірки знаходження відхилення навігаційного вимірювання від опорної траєкторії космічного апарата, у допустимій області відхилень навігаційних вимірювань, який відрізняється тим, що на наземних технічних вимірювальних засобах визначають та передають на борт космічного апарата початкові умови руху космічного апарата з характеристиками їх похибок.
2. Спосіб за п. 1, який відрізняється тим, що на борту космічного апарата проводять прогнозування його руху для визначення опорної траєкторії та її похибок за стохастичною динамічною моделлю руху космічного апарата, яка враховує випадкові флуктуації густини атмосфери та похибки початкових умов руху.
3. Спосіб за п. 1, який відрізняється тим, що область допустимих відхилень визначають зі штатної точності роботи апаратури супутникової навігації та прогнозованих похибок траєкторії.
Текст
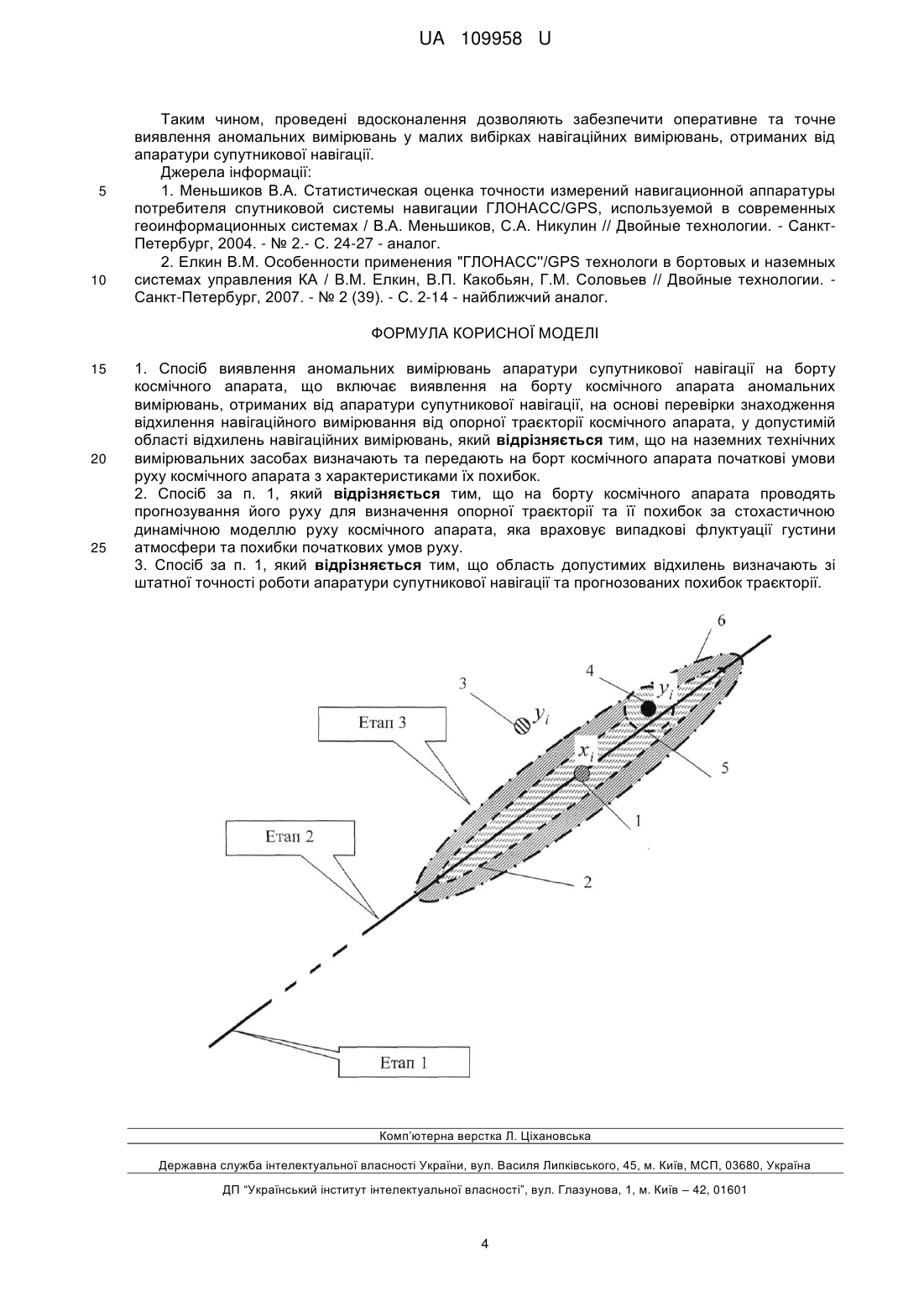
Реферат: Спосіб виявлення аномальних вимірювань апаратури супутникової навігації на борту космічного апарата, згідно з яким здійснюється виявлення на борту космічного апарата аномальних вимірювань, отриманих від апаратури супутникової навігації, на основі перевірки знаходження відхилення навігаційного вимірювання від опорної траєкторії космічного апарата, у допустимій області відхилень навігаційних вимірювань, який відрізняється тим, що на наземних технічних вимірювальних засобах визначають та передають на борт космічного апарата початкові умови руху космічного апарата з характеристиками їх похибок. Також на борту космічного апарата проводять прогнозування його руху для визначення опорної траєкторії та її похибок за стохастичною динамічною моделлю руху космічного апарата яка враховує випадкові флуктуації густини атмосфери та похибки початкових умов руху, а область допустимих відхилень визначають зі штатної точності роботи апаратури супутникової навігації та прогнозованих похибок траєкторії. UA 109958 U (54) СПОСІБ ВИЯВЛЕННЯ АНОМАЛЬНИХ ВИМІРЮВАНЬ АПАРАТУРИ СУПУТНИКОВОЇ НАВІГАЦІЇ НА БОРТУ КОСМІЧНОГО АПАРАТА UA 109958 U UA 109958 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до космічної галузі й може застосовуватися для вирішення на борту космічного апарата (КА) задач використання апаратури супутникової навігації при реалізації координатних методів управління КА. Відомий спосіб виявлення аномальних вимірювань апаратури супутникової навігації на борту КА [1]. Як і в запропонованому способі, у відомому способі здійснюють виявлення аномальних вимірювань, отриманих від апаратури супутникової навігації, на основі перевірки знаходження відхилення навігаційного вимірювання від опорної траєкторії КА, у допустимій області відхилень навігаційних вимірювань. Але на відміну від запропонованого способу, у відомому способі, по-перше, за "опорну траєкторію КА" прийнято траєкторію, яка визначена шляхом згладжування отриманих навігаційних вимірювань системою ортогональних поліномів Чебишева, та, по-друге, допустима область відхилень навігаційних вимірювань визначається тільки з штатної точності роботи апаратури супутникової навігації. Це призводить до необхідності попереднього накопичення на борту КА, для подальшої обробки, великої вибірки вимірювань від апаратури супутникової навігації та проведення виявлення аномальних вимірювань з деякою часовою затримкою. Таким чином, суттєвим недоліками відомого способу є низька точність - неможливість виявлення аномальних вимірювань у малих вибірках вимірювань апаратури супутникової навігації, та низька оперативність - наявність значних часових затримок при виявленні аномальних вимірювань у накопичених вибірках. Найбільш близьким аналогом є спосіб виявлення аномальних вимірювань апаратури супутникової навігації на борту КА [2], у якому здійснюють виявлення аномальних вимірювань, отриманих від апаратури супутникової навігації, на основі перевірки знаходження навігаційного вимірювання у допустимій області відхилень навігаційних вимірювань відносно опорної траєкторії. За "опорну траєкторію" прийняте апріорне значення інтегралу енергії КА без урахування в повному обсязі всіх членів розкладу геопотенціалу в ряд за сферичними функціями. Це призводить, по-перше, до розширення області допустимих відхилень навігаційних вимірювань, та, по-друге, до неможливості врахування у повному обсязі особливостей змін траєкторії КА за рахунок впливу варіацій густини атмосфери. Таким чином, суттєвими недоліками найближчого аналога є низька точність - неможливість виявлення усіх можливих аномальних вимірювань апаратури супутникової навігації. В основу корисної моделі поставлено задачу шляхом зміни завдання опорної траєкторії КА за інформацією від наземних вимірювальних засобів, вдосконалення визначення області допустимих відхилень навігаційних вимірювань із врахуванням похибок прогнозування руху КА, які розраховані за стохастичною динамічною моделлю руху за початковими умовами які додаткового визначення на наземних технічних вимірювальних засобах, забезпечити оперативне та точне виявлення аномальних вимірювань у малих вибірках навігаційних вимірювань, отриманих від апаратури супутникової навігації. Поставлена задача вирішується тим, що у способі виявлення аномальних вимірювань апаратури супутникової навігації на борту КА, згідно з яким, здійснюється виявлення аномальних вимірювань, отриманих від апаратури супутникової навігації, на основі перевірки знаходження відхилення навігаційного вимірювання від опорної траєкторії КА у допустимій області відхилень навігаційних вимірювань, згідно з корисною моделлю, на наземних технічних вимірювальних засобах визначають та передають на борт КА початкові умови руху КА з характеристиками їх похибок, далі на борту КА проводять прогнозування його руху для визначення опорної траєкторії та її похибок за стохастичною динамічною моделлю руху КА, яка враховує випадкові флуктуації густини атмосфери та похибки початкових умов руху, наприкінці область допустимих відхилень визначають з штатної точності роботи апаратури супутникової навігації та прогнозованих похибок траєкторії. Порівняльний аналіз запропонованої корисної моделі з найближчим аналогом, дозволяє зробити висновок, що спосіб виявлення аномальних вимірювань апаратури супутникової навігації на борту КА, який запропоновано, відрізняється від найближчого аналога тим, що, поперше, на наземних технічних вимірювальних засобах визначають та передають на борт КА початкові умови руху КА з характеристиками їх похибок, по-друге, опорна траєкторія визначається за інформацією від наземних вимірювальних засобів та, по-третє, область допустимих відхилень визначають з штатної точності роботи апаратури супутникової навігації та похибок прогнозування руху КА, які розраховані за стохастичною динамічною моделлю руху, що враховує випадкові флуктуації густини атмосфери та імовірнісні характеристики початкових умов руху. 1 UA 109958 U При реалізації координатних методів управління КА на борту КА використовують апаратуру супутникової навігації, від якої отримують навігаційні вимірювання у Гринвіцькій прямокутній системі координат (ГСК) у вигляді (1) yi , t i , 5 10 де yi, ti, - навігаційне вимірювання (вектор, що складається з трьох координат та трьох складових швидкості у ГСК) та момент часу (часова відмітка), на який проведене вимірювання. Відповідно до штатної точності роботи бортової апаратури супутникової навігації похибки навігаційних вимірювань мають наступні середньоквадратичні відхилення (СКВ): СКВ координат - до 30 м; СКВ складових швидкості - до 0,5 м/с. З урахуванням цього кореляційна матриця штатних (не аномальних) похибок вимірювань бортової апаратури супутникової навігації у ГСК (Kу), має вигляд: K y diag (900 м 2 ; 900 м 2 ; 0,25 15 20 25 м2 c2 ; 0,25 м2 c2 ; 0,25 м2 c2 ), де Kу - квадратна діагональна матриця. При використанні на борту КА апаратури супутникової навігації необхідно враховувати негативний вплив наступних факторів: прийом сигналів космічних навігаційних систем, що відбиті (віддзеркалені) від земної (морської) поверхні чи від панелей сонячних батарей або інших елементів конструкції КА; навмисний впив на навігаційне поле космічних навігаційних систем; збої у роботі апаратури супутникової навігації. За рахунок впливу зазначених факторів, похибки деяких вимірювань апаратурою супутникової навігації не вкладаються у штатну точність (2). Такі похибки є аномальними, і тому їх потрібно виявляти та відбраковувати (відкидати). Для виявлення та відбракування аномальних вимірювань задають опорну траєкторія КА у вигляді стохастичної динамічної моделі руху КА y i , t i , , t t 0 , x( t 0 ) x 0 ,K x0 , ( t ) 0,N ( t )( t ) , 30 35 (2) (3) де x x(t) - випадкові прогнозовані параметри (траєкторія) руху КА; x 0 , K x0 - початкові умови руху КА та кореляційна матриця початкових умов руху КА; (t ) білий шум із заданими характеристиками (нульовим математичним сподіванням та кореляційною функцією N ( t )( )) ; N ( t ) - інтенсивність білого шуму; () - дельта функція Дірака; f ( x, t ) - функція, яка враховує сили, що діють на КА; q( x, t) - функція, яка враховує варіації густити атмосфери. Початкові умови руху КА х0 та характеристики їх похибок - кореляційна матриця похибок початкових умов руху КА Kх0, визначають на наземних вимірювальних засобах на основі проведення вимірювання поточних навігаційних параметрів КА. Розрахунок статистичних характеристик моделі (3) проводять на основі методу лінеаризації відносно середнього руху та методу кореляційних перетворень. Такий підхід забезпечує задовільну точність при допустимій обчислювальній складності та має вигляд: 40 dx dt f ( x, t ), x( t 0 ) x 0 , t t 0 ; T dK x f ( x, t ) K K f ( x, t ) q( x, t )N ( t )qT ( x, t ),K ( t ) K , x x x 0 x0 dt x x 45 (4) де x x(t) , K x K x (t ) - прогнозоване положення КА та. Кореляційна матриця похибок прогнозованого положення КА. Для опорної траєкторії КА та похибок навігаційних вимірювань КА виконують наступні характерні особливості: опорну траєкторію КА, яку визначають за інформацією від наземних вимірювальних засобів (кресл., позиція 1), має похибки прогнозування вздовж орбіти, значно більші за інші напрямки 2 UA 109958 U 5 10 15 20 25 30 (область похибок прогнозованого положення КА є "витягнутою" вздовж орбіти, що характеризується значною різницею у значеннях відповідних елементів кореляційної матриці похибок прогнозування руху КА) (кресл., позиція 2); похибки вимірювання апаратури супутникової навігації, як аномальні (кресл., позиція 3), так і штатні (кресл., позиція 4), в усіх напрямках мають однакові статистичні характеристики (область похибок навігаційних вимірювань є "сферою", що характеризується однаковими значеннями відповідних елементів кореляційної матриці похибок навігаційних вимірювань, яка є діагональною) (кресл., позиція 5); вимірювання апаратурою супутникової навігації та наземними вимірювальними засобами є незалежними (кореляційна матриця відхилення навігаційних вимірювань від опорної траєкторії визначається як сума кореляційних матриць похибок вимірювань та опорної траєкторії відповідно) (кресл., позиція 6); закон розподілу похибок вимірювання апаратури супутникової навігації та наземними вимірювальними засобами можна прийняти нормальним (визначення аномальних навігаційних вимірювань можна проводити на основі узагальненого правила "3σ" щодо перевірки потрапляння випадкового вимірювання у шестивимірний еліпсоїд розсіювання). З урахуванням наведених особливостей, виявлення аномальних вимірювань проводять наступним чином: 1. На наземних вимірювальних засобах на основі проведення вимірювання поточних навігаційних параметрів КА визначають початкові умови руху КА (х 0) та характеристики їх похибок - кореляційна матриця початкових умов руху КА (Kх0). Визначені значення х0 та Kх0 передають на борт КА (кресл., етап 1); 2. Розраховують опорну траєкторію КА - проводиться рішення системи (4) для значення часу, на який проведене вимірювання апаратурою супутникової навігації t i, та визначають траєкторію КА x i x(t i ) і кореляційна матриця похибок прогнозування руху КА K xi K x (t i ) (кресл., етап 2); 3. Перевіряють виконання умови щодо знаходження відхилення навігаційного вимірювання (1) від опорної траєкторії КА у допустимій області відхилень, яка задається характеристиками похибок штатної роботи апаратури супутникової навігації (2) та характеристиками похибок визначення опорної траєкторії КА (кресл., етап 3) (yi xi )T (K y K xi )1(yi xi ) 9 , 35 40 45 50 55 (5) де x i x(t i ) , K xi K x (t i ) - математичне сподівання та кореляційна матриця похибок прогнозування траєкторії КА (4), yi, Ki - вимірювання (1) та кореляційна матриця (2) похибок вимірювання апаратури супутникової навігації. 4. Якщо умова (5) не виконується, тоді навігаційне вимірювання (1) є аномальним і відбраковується (відкидається), якщо (5) виконується - вимірювання можна використовувати на борту КА при реалізації координатних методів управління КА. Експериментальне підтвердження. Для перевірки було проведено моделювання процесу виявлення аномальних вимірювань у малих вибірках, отриманих від апаратури супутникової навігації, запропонованим способом і у найближчому аналогу на часовому інтервалі до 1 доби. Параметри орбіти КА: висота 680 км, ексцентриситет 0,01, балістичний коефіцієнт 0,06. В моделі руху КА задано поле 44 гармонік розкладу геопотенціалу Землі у ряд за сферичними функціями та враховані сили аеродинамічного опору атмосфери відповідно до ГОСТ-25645.101-83. Типові характеристики похибок початкових умов руху КА (характеристики діагональних елементів кореляційної матриці -8 -4 Kх0): СКВ координат - 10 м; СКВ складових швидкості - 10 м/с. На основі найближчого аналога та за запропонованим способом виявлено усі аномальні вимірювання апаратури супутникової навігації, якщо відхилення навігаційного вимірювання від опорної траєкторіє є значним. Проте, при виявлення аномальних вимірювань, якщо їх відхилення є незначними (знаходяться біля границі допустимої області відхилень), найближчий аналог дозволяє виявити лише 40-50 % аномальних вимірювань, а запропонований спосіб - 80-90 %. Зазначене характеризує більшу точність і достовірність запропонованого способу. Аналіз наведених результатів показує, що запропонований спосіб дозволяє оперативно і точно виявляти аномальні вимірювання у вимірюваннях апаратурою супутникової навігації. 3 UA 109958 U 5 10 Таким чином, проведені вдосконалення дозволяють забезпечити оперативне та точне виявлення аномальних вимірювань у малих вибірках навігаційних вимірювань, отриманих від апаратури супутникової навігації. Джерела інформації: 1. Меньшиков В.А. Статистическая оценка точности измерений навигационной аппаратуры потребителя спутниковой системы навигации ГЛОНАСС/GPS, используемой в современных геоинформационных системах / В.А. Меньшиков, С.А. Никулин // Двойные технологии. - СанктПетербург, 2004. - № 2.- С. 24-27 - аналог. 2. Елкин В.М. Особенности применения "ГЛОНАСС''/GPS технологи в бортовых и наземных системах управления КА / В.М. Елкин, В.П. Какобьян, Г.М. Соловьев // Двойные технологии. Санкт-Петербург, 2007. - № 2 (39). - С. 2-14 - найближчий аналог. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 1. Спосіб виявлення аномальних вимірювань апаратури супутникової навігації на борту космічного апарата, що включає виявлення на борту космічного апарата аномальних вимірювань, отриманих від апаратури супутникової навігації, на основі перевірки знаходження відхилення навігаційного вимірювання від опорної траєкторії космічного апарата, у допустимій області відхилень навігаційних вимірювань, який відрізняється тим, що на наземних технічних вимірювальних засобах визначають та передають на борт космічного апарата початкові умови руху космічного апарата з характеристиками їх похибок. 2. Спосіб за п. 1, який відрізняється тим, що на борту космічного апарата проводять прогнозування його руху для визначення опорної траєкторії та її похибок за стохастичною динамічною моделлю руху космічного апарата, яка враховує випадкові флуктуації густини атмосфери та похибки початкових умов руху. 3. Спосіб за п. 1, який відрізняється тим, що область допустимих відхилень визначають зі штатної точності роботи апаратури супутникової навігації та прогнозованих похибок траєкторії. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 11/00
Мітки: борту, виявлення, космічного, аномальних, апарата, апаратури, супутникової, навігації, спосіб, вимірювань
Код посилання
<a href="https://ua.patents.su/6-109958-sposib-viyavlennya-anomalnikh-vimiryuvan-aparaturi-suputnikovo-navigaci-na-bortu-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб виявлення аномальних вимірювань апаратури супутникової навігації на борту космічного апарата</a>
Спосіб аеродинамічного корегування польотом вільнопадаючого контейнера з використанням сигналів супутникової навігації
Номер патенту: 60401
Опубліковано: 25.06.2011
Автори: Коврижкін Ігор Олегович, Мельникович Володимир Борисович, Лагута Андрій Геннадійович, Горін Іван Ярославович, Коврижкін Олег Георгійович
МПК: B64D 1/00
Мітки: польотом, супутникової, спосіб, навігації, сигналів, корегування, використанням, контейнера, вільнопадаючого, аеродинамічного
Формула / Реферат:
Спосіб корегування траєкторії вільнопадаючого контейнера з використанням сигналів супутникової навігації, що включає задання координат точки доставки контейнера, скидання контейнера з літального апарата, визначення поточних координат контейнера за допомогою системи супутникової навігації, який відрізняється тим, що задання координат точки доставки контейнера, зокрема, географічної широти jтд, географічної довготи λтд та висоти Нтд...
Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра
Номер патенту: 67704
Опубліковано: 12.03.2012
Автори: Коврижкін Олег Георгійович, Коврижкін Ігор Олегович, Горін Іван Ярославович, Мельникович Володимир Борисович, Лагута Андрій Геннадійович
МПК: G01C 21/08
Мітки: кутової, сигналів, магнітометра, навігації, спосіб, орієнтації, літального, використанням, супутникової, визначення, апарата
Формула / Реферат:
Спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігації та магнітометра, у якому вимірювання сигналів напруженості магнітного поля Землі здійснюють з використанням трьох магнітометрів, орієнтованих за трьома взаємно перпендикулярними осями зв'язаної з літальним апаратом системи координат, який відрізняється тим, що сигнал курсу
Спосіб підвищення точності визначення параметрів руху космічного апарата
Номер патенту: 56376
Опубліковано: 10.01.2011
Автори: Парфенюк Василь Григорович, Ожінський Віктор Васильович, Топольницький Павло Петрович, Загорулько Олександр Миколайович
МПК: G05B 17/00
Мітки: апарата, параметрів, руху, точності, визначення, спосіб, космічного, підвищення
Формула / Реферат:
Спосіб підвищення точності визначення параметрів руху космічного апарата, який відрізняється тим, що в апаратурі супутникової навігації дані із навігаційного обчислювача надходять до блока робастної обробки, який проводить їх згладжування з використанням завадостійких (робастних) статистичних процедур та видає уточнені параметри руху космічного апарата.
Спосіб регулювання перешкодозахищеності вимірів параметрів руху космічного апарата
Номер патенту: 72509
Опубліковано: 27.08.2012
Автори: Фриз Сергій Петрович, Парфенюк Василь Григорович, Ожінський Віктор Васильович, Топольницький Павло Петрович
МПК: G05B 17/00
Мітки: спосіб, перешкодозахищеності, космічного, руху, параметрів, апарата, вимірів, регулювання
Формула / Реферат:
Спосіб регулювання перешкодозахищеності вимірів параметрів руху космічного апарата, який полягає в тому, що в апаратурі супутникової навігації до блока робастної обробки надходять виміри параметрів руху та від бортового комплексу управління визначені за станом магнітосфери Землі і космічної плазми значення коефіцієнта перешкодозахищеності, корельованого з рівнем перешкод, блок робастної обробки проводить згладжування параметрів руху,...
Спосіб перевірки вірогідності вимірювання параметрів руху космічного апарата
Номер патенту: 61315
Опубліковано: 11.07.2011
Автори: Фриз Сергій Петрович, Парфенюк Василь Григорович, Ожінський Віктор Васильович, Петрожалко Володимир Володимирович
МПК: G05B 17/00
Мітки: спосіб, руху, космічного, параметрів, перевірки, вимірювання, апарата, вірогідності
Формула / Реферат:
Спосіб перевірки вірогідності вимірювання параметрів руху космічного апарата, який полягає в тому, що в обчислювальній машині бортового комплексу керування дані з апаратури супутникової навігації (координати та швидкості) переводяться у Кеплерові елементи орбіти та порівнюються із прогнозованими...
Попередній патент: Спосіб прогнозування несприятливого перебігу гострого необструктивного пієлонефриту у жінок репродуктивного віку
Наступний патент: Упаковка для термічно оброблюваних м’ясопродуктів зі здатністю легкого відкривання
Випадковий патент: Спосіб отримання коагулянта із шламів водоочистки