Спосіб керування механізмом переміщення прольотного крана
Номер патенту: 111103
Опубліковано: 25.10.2016
Автори: Крушельницький Віктор Васильович, Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович

Формула / Реферат
Спосіб керування механізмом переміщення прольотного крана, відповідно до якого, вимірюють довжину підвісу канату і визначають час перехідного процесу пуску, який відрізняється тим, що визначається маса вантажу та до усталеної (номінальної) швидкості прольотний кран розганяється по визначеному закону зміни швидкості:
ẋ0=(30k((L/g)+((m+m1)/с))υном(k3(8T3+2tT2(-12+k2T2)+4t3(-4+
+k2T2)+3t2·(8T-2k2T3))+4k(k2t(3t2-4tT)+k2(t3-2t2T+T3)cos(kT)+2T·
·((12k-k3T2)·cos(kt)+12(-k·cos(kt)+k·cos(k(t-T)))-k(12kt+k3T2(-t+
+T))·sin(kt)+k·((-12+k2T2)cos(k(t-T))-3kT(-2t+T)(k·cos(kt)+k·
·cos(k(t-T)))-k(-12t+12T+k2tT2)sin(k(t-T))+6kT(sin(kt)+
+sin(k(t-T)))))+(6k2(4t-2T)+2k4t2·(t-T)+2k4t(t-T)2)T·sin(kT)))/
/(T(-2880-240k2T2-24k4T4+k6T6+24(120-50k2T2+k4T4)соs(kT)+
+kT(2880-240/k2T2+k4T4)·sin(kT)))+(60k3Lm1υном(k(-48t+24T+
+12k2tT2-6k2T3)+24kt·cos(kT)+24k(t-T)·cos(kT)+T(k(-12+
+k2T2)cos(kt)+k(-12+k2T(-6t+5T))cos(kt)+k(12-k2T2)cos(k(t-T))+
+k(12+k2T(-6t+T))cos(k(t-T))-6k2T sin(kt)-k2(t-T)(-12+k2T2)·
·sin(kt)-6k2T sin(k(t-T))-k2t(12-k2T2) sin(k(t-T)))+k2(12t-6T)·
·Tsin(kT)))/(cgT(-2880-240k2T2-24k4T4+k6T6+24(120-50k2T2+k4T4)·
·соs(kT)+ kT(2880-240k2T2+k4T4)sin(kT)))+(υном(-2880kT+
+k7t4(4t-6T)T2-240k3T3+4k7t3T2(2t2-6tT+5T2)-4k5t2(8t3-18t2T+
+30tT2-20T3)-8k5t(2t4-6t3T+15t2T2-20tT3+15T4)+8k(360T-90k2tT2-
-30k2T2(3t+2T)+k4(6t5-15t4T+15t2T3))cos(kT)+120T(k(-12+k2T2)·
·cos(kt)+k(36+k2T(-6t+T))cos(kt)-k(-12+k2T2)cos(k(t-T))+
+k(-36+k2T(-6t+5T))cos(k(t-T))-6k2Tsin(kt)-k2(t(-12+k2T2)-
-T(12+k2T2))sin(kt)-6k2Tsin(k(t-T))+k2(-12t+24T+ k2tT2)·
·sin(k(t-T)))+T(k6t4·(4t-6T)+60k4t2(t-3T)+60k4t2(t+T)+
+120k4t(t-3T)(t+T)+120k2(12t+18T)+4k6t3(2t2-6tT+5T2))sin(kT)))/
/(2kT(-2880-240k2T2-24k4T4+k6T6+24(l20-50k2T2+k4T4)cos(kT)+
+kT(2880-240k2T2+k4T4)sin(kT))),
де T - тривалість перехідного процесу пуску електропривода механізму переміщення мостового крана;
vном - номінальна швидкість прольотного крана;
L - довжина канату, на якому підвішений вантаж;
g - прискорення вільного падіння;
t - час;
![]() - частота власних коливань вантажу відносно кранової балки;
- частота власних коливань вантажу відносно кранової балки;
![]() - приведена маса візка з прогоном крана;
- приведена маса візка з прогоном крана;
![]() - приведена маса вантажу;
- приведена маса вантажу;
![]() - приведена жорсткість металоконструкції прогону крана у горизонтальному напрямку.
- приведена жорсткість металоконструкції прогону крана у горизонтальному напрямку.
Текст
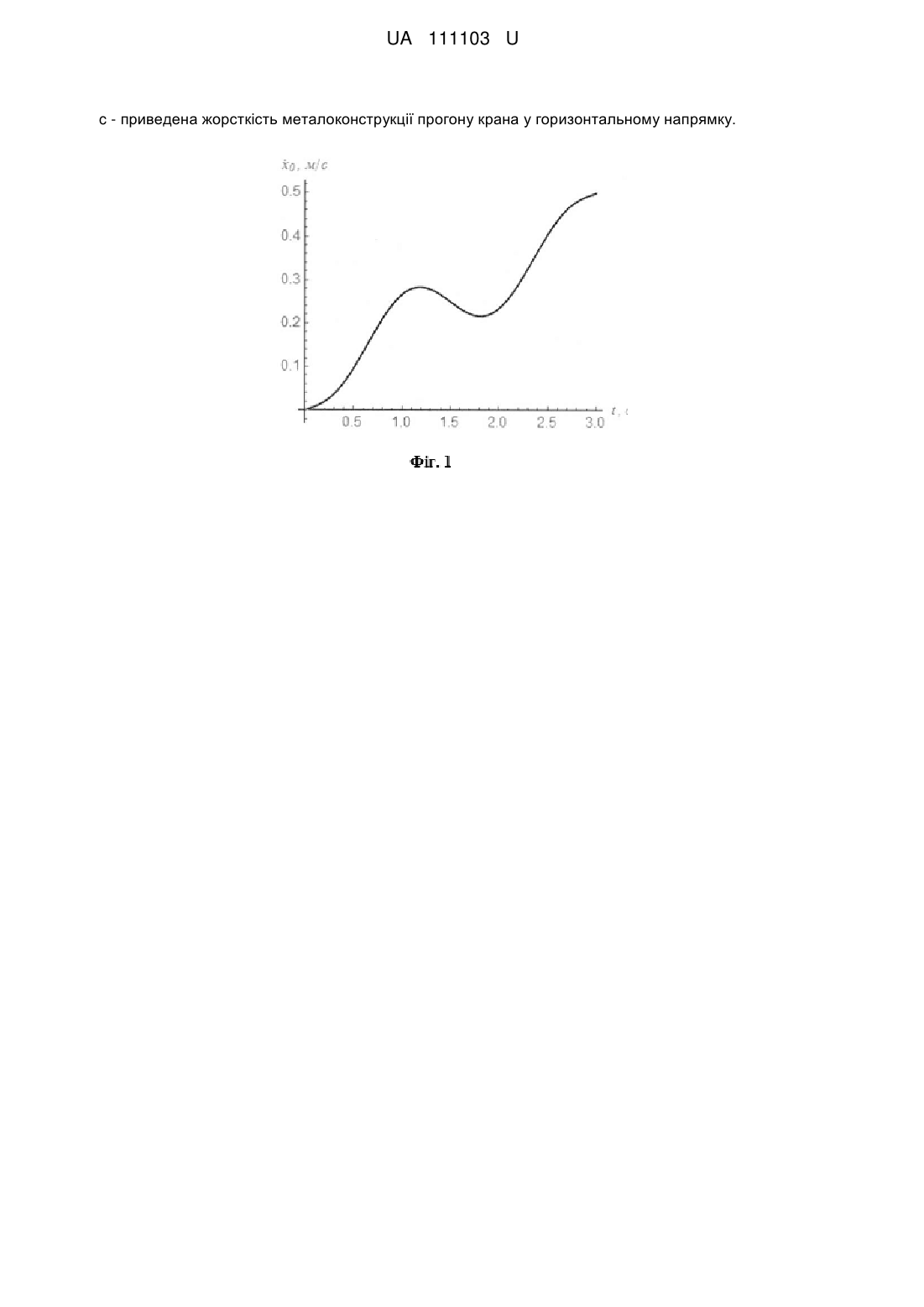
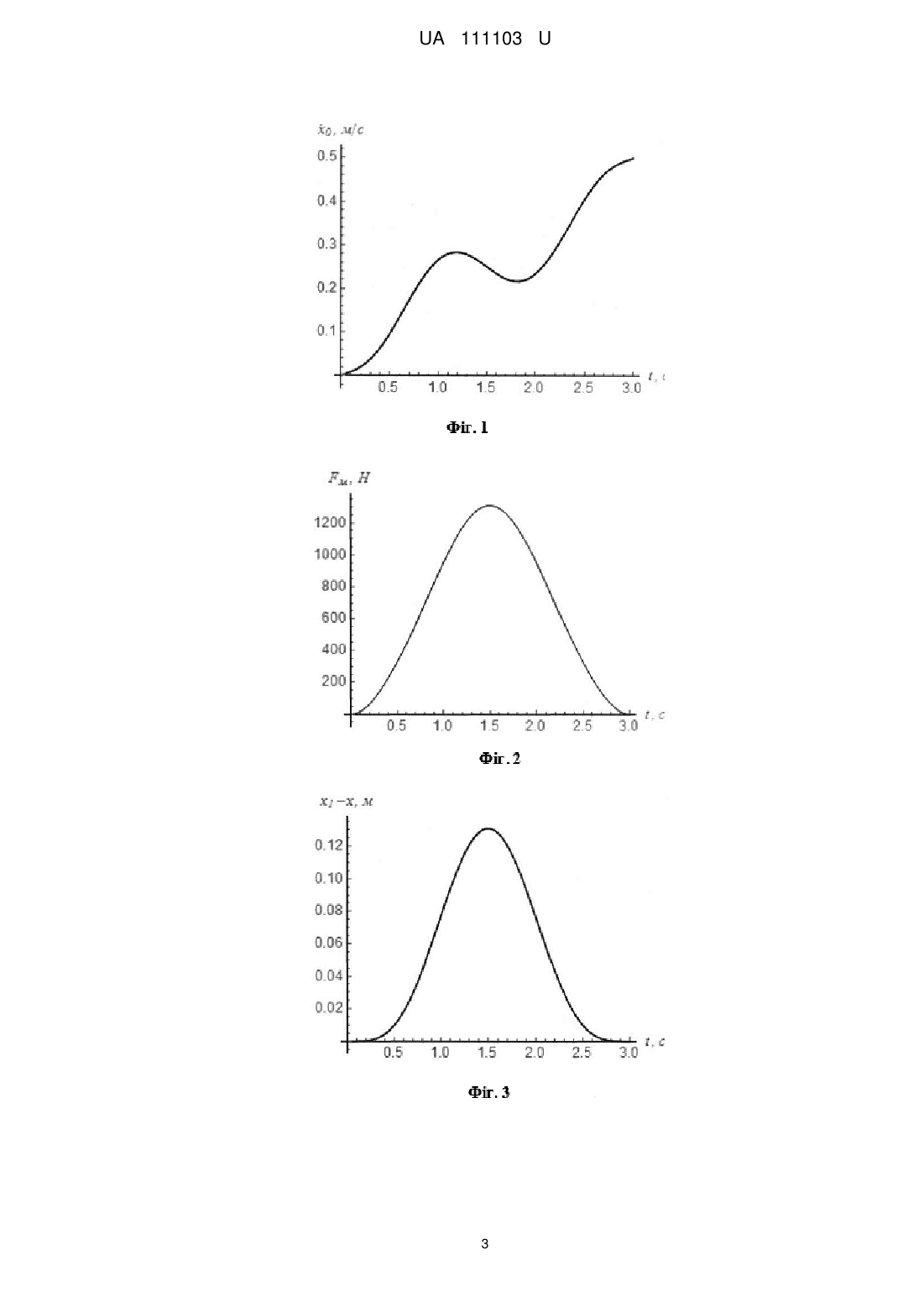
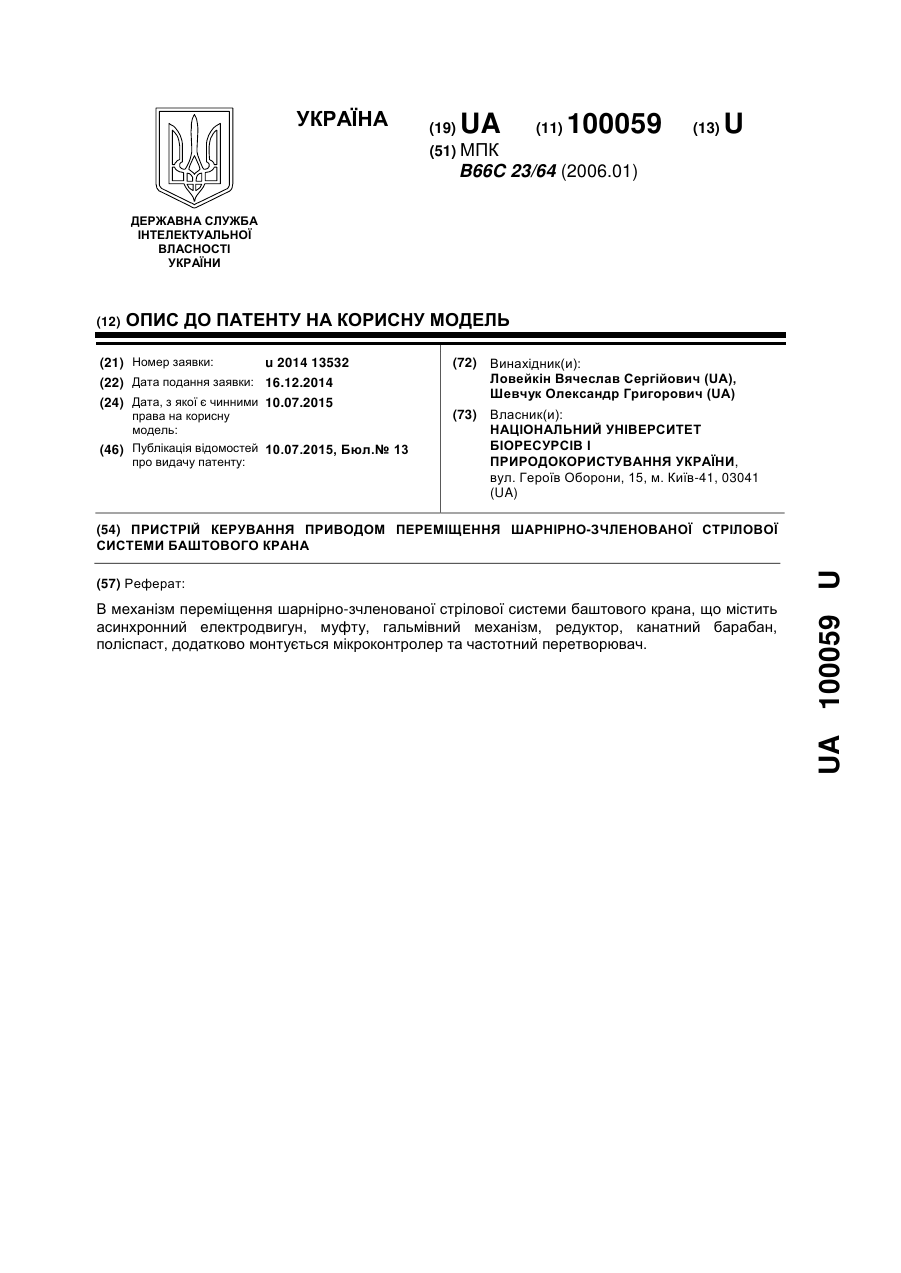
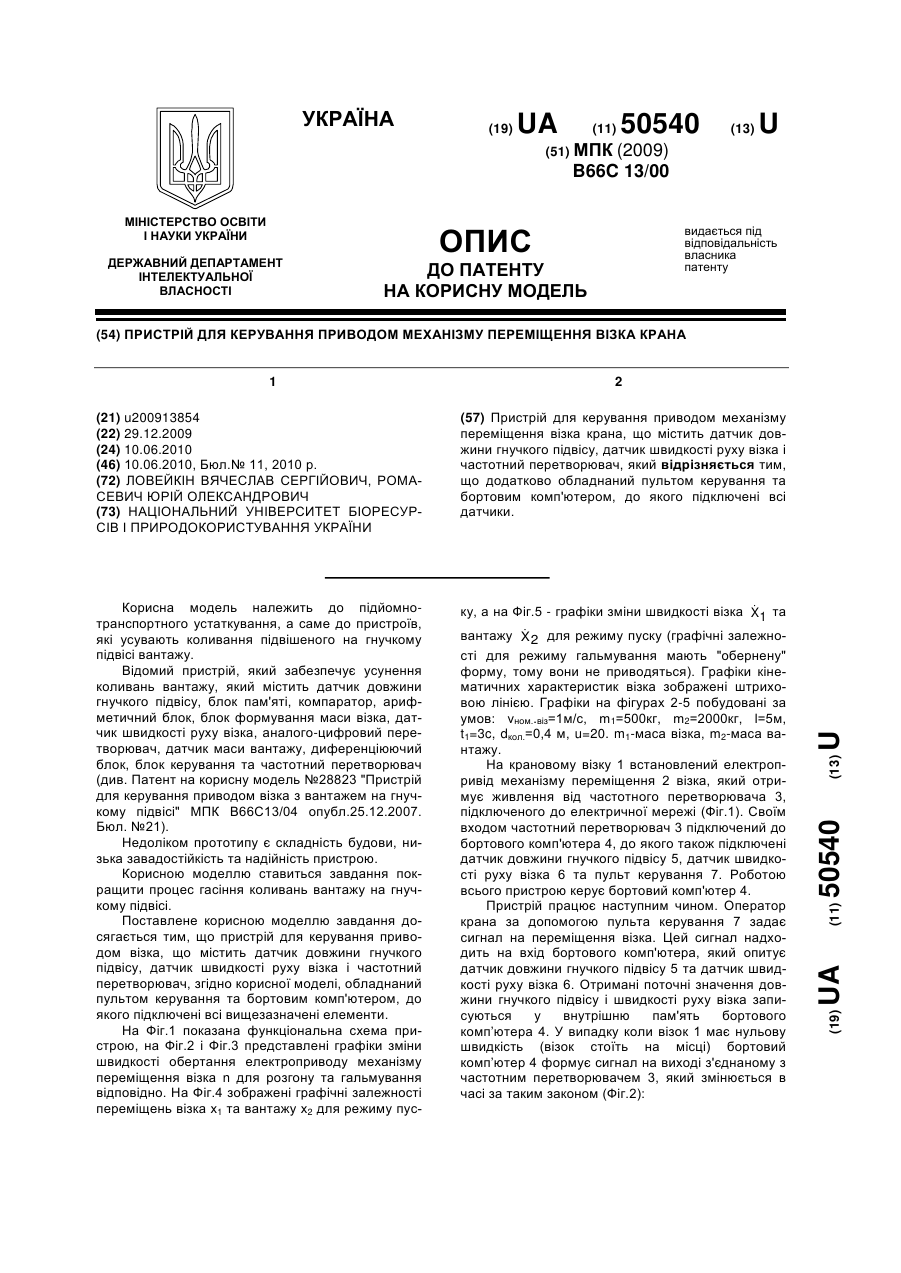
Реферат: Спосіб керування механізмом переміщення прольотного крана, відповідно до якого, вимірюють довжину підвісу канату і визначають час перехідного процесу пуску. Крім цього визначається маса вантажу та до усталеної (номінальної) швидкості прольотний кран розганяється по визначеному закону зміни швидкості: 3 3 2 2 2 3 2 2 2 2 3 2 2 x 0 =(30k((L/g)+((m+m1)/с))υном(k (8T +2tT (-12+k T )+4t (-4+k T )+3t ·(8T-2k T ))+4k(k t(3t 2 3 2 3 3 2 3 2 -4tT)+k (t -2t T+T )cos(kT)+2T·((12k-k T )·cos(kt)+12(-k·cos(kt)+k·cos(k(t-T)))-k(12kt+k T (-t+ 2 2 2 2 +T))·sin(kt)+k·((-12+k T )cos(k(t-T))-3kT(-2t+T)(k·cos(kt)+k·cos(k(t-T)))-k(-12t+12T+k tT )sin(k(t2 4 2 4 2 -T))+6kT(sin(kt)+sin(k(t-T)))))+(6k (4t-2T)+2k t ·(t-T)+2k t(t-T) )T·sin(kT)))/ 2 2 4 4 6 6 2 2 4 4 2 2 4 4 /(T(-2880-240k T -24k T +k T +24(120-50k T +k T )соs(kT)+kT(2880-240/k T +k T )·sin(kT)))+ 3 2 2 2 3 +(60k Lm1υном(k(-48t+24T+12k tT -6k T )+24kt·cos(kT)+24k(t-T)·cos(kT)+T(k(-12+ 2 2 2 2 2 2 2 +k T )cos(kt)+k(-12+k T(-6t+5T))cos(kt)+k(12-k T )cos(k(t-T))+k(12+k T(-6t+T))cos(k(t-T))-6k T 2 2 2 2 2 2 2 2 sin(kt)-k (t-T)(-12+k T )·sin(kt)-6k T sin(k(t-T))-k t(12-k T ) sin(k(t-T)))+k (12t-6T)· 2 2 4 4 6 6 2 2 4 4 ·Tsin(kT)))/(cgT(-2880-240k T -24k T +k T +24(120-50k T +k T )·соs(kT)+kT(28802 2 4 4 7 4 2 3 3 7 3 2 2 2 5 2 3 2 -240k T +k T )sin(kT)))+(υном(-2880kT+k t (4t-6T)T -240k T +4k t T (2t -6tT+5T )-4k t (8t -18t T+ 2 3 5 4 3 2 2 3 4 2 2 2 2 4 5 +30tT -20T )-8k t(2t -6t T+15t T -20tT +15T )+8k(360T-90k tT -30k T (3t+2T)+k (6t 4 2 3 2 2 2 2 2 -15t T+15t T ))cos(kT)+120T(k(-12+k T )·cos(kt)+k(36+k T(-6t+T))cos(kt)-k(-12+k T )cos(k(t-T))+ 2 2 2 2 2 2 2 2 +k(-36+k T(-6t+5T))cos(k(t-T))-6k Tsin(kt)-k (t(-12+k T )-T(12+k T ))sin(kt)-6k Tsin(k(t-T))+ 2 2 2 6 4 4 2 4 2 +k (-12t+24T+k tT )·sin(k(t-T)))+T(k t ·(4t-6T)+60k t (t-3T)+60k t (t+T)+ 4 2 6 3 2 2 2 2 4 4 +120k t(t-3T)(t+T)+120k (12t+18T)+4k t (2t -6tT+5T ))sin(kT)))/(2kT(-2880-240k T -24k T + 6 6 2 2 4 4 2 2 4 4 +k T +24(120-50k T +k T )cos(kT)+kT(2880-240k T +k T )sin(kT))), де T - тривалість перехідного процесу пуску електропривода механізму переміщення мостового крана; vном - номінальна швидкість прольотного крана; L - довжина канату, на якому підвішений вантаж; g - прискорення вільного падіння; t - час; m m1 g k - частота власних коливань вантажу відносно кранової балки; m1 L m1 - приведена маса візка з прогоном крана; m - приведена маса вантажу; UA 111103 U (54) СПОСІБ КЕРУВАННЯ МЕХАНІЗМОМ ПЕРЕМІЩЕННЯ ПРОЛЬОТНОГО КРАНА UA 111103 U c - приведена жорсткість металоконструкції прогону крана у горизонтальному напрямку. UA 111103 U 5 10 15 20 25 30 35 Корисна модель належить до галузі машинобудування, а саме - способів керування приводами підйомно-транспортних механізмів. Відомий аналог керування механізмом переміщення візка (Патент № 87236, опубл. 25.06.2009 р. бюл. № 12), який включає розгін візка по визначеному закону зміни швидкості. Недоліком аналога є те, що при розгоні та гальмуванні крана у його металоконструкції виникають значні динамічні навантаження, які знижують довговічність крана. Корисною моделлю поставлена задача зменшити динамічні навантаження на металоконструкцію крана під час перехідних режимів пуску механізму переміщення крана. Поставлена корисною моделлю задача вирішується тим, що у способі керування механізмом переміщення прольотного крана, відповідно до якого, вимірюють довжину підвісу канату і визначають час перехідного процесу пуску, згідно з корисною моделлю, визначається маса вантажу та до усталеної (номінальної) швидкості прольотний кран розганяється по визначеному закону зміни швидкості: 3 3 2 2 2 3 2 2 2 2 3 2 2 x 0 =(30k((L/g)+((m+m1)/с))υном(k (8T +2tT (-12+k T )+4t (-4+k T )+3t ·(8T-2k T ))+4k(k t(3t -tT)+ 2 3 2 3 3 2 3 2 +k (t -2t T+T )cos(kT)+2T·((12k-k T )·cos(kt)+12(-k·cos(kt)+k·cos(k(t-T)))-k(12kt+k T (-t+ 2 2 +T))·sin(kt)+k·((-12+k T )cos(k(t-T))-3kT(-2t+T)(k·cos(kt)+k·cos(k(t-T)))-k(-12t+12T+ 2 2 2 4 2 4 2 +k tT )sin(k(t-T))+6kT(sin(kt)+sin(k(t-T)))))+(6k (4t-2T)+2k t ·(t-T)+2k t(t-T) )T·sin(kT)))/ 2 2 4 4 6 6 2 2 4 4 2 2 /(T(-2880-240k T -24k T +k T +24(120-50k T +k T )соs(kT)+kT(2880-240/k T + 4 4 3 2 2 2 3 +k T )·sin(kT)))+(60k Lm1υном(k(-48t+24T+12k tT -6k T )+24kt·cos(kT)+24k(t-T)·cos(kT)+T(k(-12+ 2 2 2 2 2 2 +k T )cos(kt)+k(-12+k T(-6t+5T))cos(kt)+k(12-k T )cos(k(t-T))+k(12+k T(-6t+T))cos(k(t-T))2 2 2 2 2 2 2 2 -6k T sin(kt)-k (t-T)(-12+k T )·sin(kt)-6k T sin(k(t-T))-k t(12-k T ) sin(k(t-T)))+ 2 2 2 4 4 6 6 2 2 4 4 +k (12t-6T)·Tsin(kT)))/(cgT(-2880-240k T -24k T +k T +24(120-50k T +k T )·соs(kT)+ 2 2 4 4 7 4 2 3 3 7 3 2 2 2 +kT(2880-240k T +k T )sin(kT)))+(υном(-2880kT+k t (4t-6T)T -240k T +4k t T (2t -6tT+5T )5 2 3 2 2 3 5 4 3 2 2 3 4 2 2 -4k t (8t -18t T+30tT -20T )-8k t(2t -6t T+15t T -20tT +15T )+8k(360T-90k tT 2 2 4 5 4 2 3 2 2 2 -30k T (3t+2T)+k (6t -15t T+15t T ))cos(kT)+120T(k(-12+k T )·cos(kt)+k(36+k T(-6t+T))cos(kt)2 2 2 2 2 2 2 -k(-12+k T )cos(k(t-T))+k(-36+k T(-6t+5T))cos(k(t-T))-6k Tsin(kt)-k (t(-12+k T )2 2 2 2 2 2 6 4 -T(12+k T ))sin(kt)-6k Tsin(k(t-T))+k (-12t+24T+k tT )·sin(k(t-T)))+T(k t ·(4t-6T)+ 4 2 4 2 4 2 6 3 2 2 +60k t (t-3T)+60k t (t+T)+120k t(t-3T)(t+T)+120k (12t+18T)+4k t (2t -6tT+5T ))sin(kT)))/ 2 2 4 4 6 6 2 2 4 4 2 2 4 4 /(2kT(-2880-240k T -24k T +k T +24(120-50k T +k T )cos(kT)+kT(2880-240k T +k T )sin(kT))), де T - тривалість перехідного процесу пуску електропривода механізму переміщення мостового крана; vном - номінальна швидкість прольотного крана; L - довжина канату, на якому підвішений вантаж; g - прискорення вільного падіння; t - час; m m1 g - частота власних коливань вантажу відносно кранової балки; m1 L m1 - приведена маса візка з прогоном крана; m - приведена маса вантажу; c - приведена жорсткість металоконструкції прогону крана у горизонтальному напрямку. Приклад здійснення способу. Перехідні процеси пуску механізму переміщення крана відбувається за певним законом, для знаходження якого використано інтегральний критерій (для оптимізації перехідного процесу пуску), він являє собою середньоквадратичне значення інтенсивності зміни функції зусилля, що діє на металоконструкцію прогону крана: k 40 1 45 1 t1 2 IF F2dt min , (1) T 0 де t - час, T - тривалість перехідного процесу пуску електропривода механізму переміщення мостового крана, F - зусилля, що діє на кранову балку під час розгону крана. Крапка над символом означає диференціювання за часом. Підінтегральний вираз критерію (1) знаходиться за виразом: VI 50 VI L F m1 x (m1 m) x , g де x - узагальнена координата переміщення вантажу. В результаті тривалість перехідних процесів руху прогону крана зростає незначно, а динамічні навантаження, що діють на металоконструкцію прогону крана мінімізуються. Для 1 UA 111103 U 5 10 процесу гальмування зміна швидкості приводу відбувається за законом, який є симетричним до процесу розгону. Суть корисної моделі пояснюється графіками: на фіг. 1 - представлено зміни швидкості кінцевих балок ẋ0 при розгоні, на фіг. 2 - зміни середньоквадратичного значення зусилля FM, що діє на металоконструкцію прогону крана, на фіг. 3 - відхилення вантажу від вертикалі під час процесу пуску (всі представлені графіки побудовані за умов: номінальна швидкість 0,5 м/с, довжина гнучкого підвісу - 3 м, час перехідного процесу - 3 с, маса вантажу - 3200 кг, маса 2 кінцевих балок - 670 кг, прискорення вільного падіння - 9,8 м/с ). Технічне рішення корисної моделі являє собою оптимальний режим руху, що зводить до мінімуму динамічні навантаження, які діють на металоконструкцію прогону крана, та збільшують його довговічність. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб керування механізмом переміщення прольотного крана, відповідно до якого, вимірюють довжину підвісу канату і визначають час перехідного процесу пуску, який відрізняється тим, що визначається маса вантажу та до усталеної (номінальної) швидкості прольотний кран розганяється по визначеному закону зміни швидкості: 3 3 2 2 2 3 2 2 2 2 3 2 2 x 0 =(30k((L/g)+((m+m1)/с))υном(k (8T +2tT (-12+k T )+4t (-4+k T )+3t ·(8T-2k T ))+4k(k t(3t 2 3 2 3 3 2 3 2 -4tT)+k (t -2t T+T )cos(kT)+2T·((12k-k T )·cos(kt)+12(-k·cos(kt)+k·cos(k(t-T)))-k(12kt+k T (-t+ 2 2 2 2 +T))·sin(kt)+k·((-12+k T )cos(k(t-T))-3kT(-2t+T)(k·cos(kt)+k·cos(k(t-T)))-k(-12t+12T+k tT )sin(k(t2 4 2 4 2 -T))+6kT(sin(kt)+sin(k(t-T)))))+(6k (4t-2T)+2k t ·(t-T)+2k t(t-T) )T·sin(kT)))/ 2 2 4 4 6 6 2 2 4 4 2 2 4 4 /(T(-2880-240k T -24k T +k T +24(120-50k T +k T )соs(kT)+kT(2880-240/k T +k T )·sin(kT)))+ 3 2 2 2 3 +(60k Lm1υном(k(-48t+24T+12k tT -6k T )+24kt·cos(kT)+24k(t-T)·cos(kT)+T(k(-12+ 2 2 2 2 2 2 2 +k T )cos(kt)+k(-12+k T(-6t+5T))cos(kt)+k(12-k T )cos(k(t-T))+k(12+k T(-6t+T))cos(k(t-T))-6k T 2 2 2 2 2 2 2 2 sin(kt)-k (t-T)(-12+k T )·sin(kt)-6k T sin(k(t-T))-k t(12-k T ) sin(k(t-T)))+k (12t-6T)· 2 2 4 4 6 6 2 2 4 4 ·Tsin(kT)))/(cgT(-2880-240k T -24k T +k T +24(120-50k T +k T )·соs(kT)+kT(28802 2 4 4 7 4 2 3 3 7 3 2 2 2 5 2 3 2 -240k T +k T )sin(kT)))+(υном(-2880kT+k t (4t-6T)T -240k T +4k t T (2t -6tT+5T )-4k t (8t -18t T+ 2 3 5 4 3 2 2 3 4 2 2 2 2 4 5 +30tT -20T )-8k t(2t -6t T+15t T -20tT +15T )+8k(360T-90k tT -30k T (3t+2T)+k (6t 4 2 3 2 2 2 2 2 -15t T+15t T ))cos(kT)+120T(k(-12+k T )·cos(kt)+k(36+k T(-6t+T))cos(kt)-k(-12+k T )cos(k(t-T))+ 2 2 2 2 2 2 2 2 +k(-36+k T(-6t+5T))cos(k(t-T))-6k Tsin(kt)-k (t(-12+k T )-T(12+k T ))sin(kt)-6k Tsin(k(t-T))+ 2 2 2 6 4 4 2 4 2 +k (-12t+24T+k tT )·sin(k(t-T)))+T(k t ·(4t-6T)+60k t (t-3T)+60k t (t+T)+ 4 2 6 3 2 2 2 2 4 4 +120k t(t-3T)(t+T)+120k (12t+18T)+4k t (2t -6tT+5T ))sin(kT)))/(2kT(-2880-240k T -24k T + 6 6 2 2 4 4 2 2 4 4 +k T +24(120-50k T +k T )cos(kT)+kT(2880-240k T +k T )sin(kT))), де T - тривалість перехідного процесу пуску електропривода механізму переміщення мостового крана; vном - номінальна швидкість прольотного крана; L - довжина канату, на якому підвішений вантаж; g - прискорення вільного падіння; t - час; k m m1 g - частота власних коливань вантажу відносно кранової балки; m1 L m1 - приведена маса візка з прогоном крана; m - приведена маса вантажу; c - приведена жорсткість металоконструкції прогону крана у горизонтальному напрямку. 2 UA 111103 U 3 UA 111103 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B66C 13/18
Мітки: крана, переміщення, керування, механізмом, прольотного, спосіб
Код посилання
<a href="https://ua.patents.su/6-111103-sposib-keruvannya-mekhanizmom-peremishhennya-prolotnogo-krana.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування механізмом переміщення прольотного крана</a>
Пристрій для керування механізмом підйому вантажу прольотного крана

Номер патенту: 85764
Опубліковано: 25.11.2013
Автори: Ромасевич Юрій Олександрович, Годун Василь Анатолійович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/22
Мітки: прольотного, крана, механізмом, пристрій, підйому, керування, вантажу
Формула / Реферат:
Пристрій для керування механізмом підйому вантажу прольотного крана, що містить датчик стану каната, задатчик, мікроконтроллер, на входи якого підключені задатчик та датчик стану каната, який відрізняється тим, що додатково обладнаний перетворювачем частоти, який інформаційним каналом підключений до мікроконтроллера і живить асинхронний короткозамкнений двигун механізму підйому вантажу.
Пристрій керування приводом переміщення шарнірно-зчленованої стрілової системи баштового крана
Номер патенту: 100059
Опубліковано: 10.07.2015
Автори: Шевчук Олександр Григорович, Ловейкін Вячеслав Сергійович
МПК: B66C 23/64
Мітки: стрілової, приводом, керування, баштового, пристрій, шарнірно-зчленованої, системі, переміщення, крана
Формула / Реферат:
Пристрій керування приводом переміщення шарнірно-зчленованої стрілової баштового крана, що містить асинхронний електродвигун, муфту, гальмівний механізм, редуктор, канатний барабан, поліспаст, який відрізняється тим, що додатково монтується мікроконтролер та частотний перетворювач.
Пристрій для керування приводом механізму переміщення візка крана
Номер патенту: 50540
Опубліковано: 10.06.2010
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/00
Мітки: візка, переміщення, керування, пристрій, крана, механізму, приводом
Формула / Реферат:
Пристрій для керування приводом механізму переміщення візка крана, що містить датчик довжини гнучкого підвісу, датчик швидкості руху візка і частотний перетворювач, який відрізняється тим, що додатково обладнаний пультом керування та бортовим комп'ютером, до якого підключені всі датчики.
Спосіб керування механізмом переміщення кранового візка
Номер патенту: 87236
Опубліковано: 25.06.2009
Автори: Ромасевич Юрій Олександрович, Ловейкін Андрій В'ячеславович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/22, B66C 13/04
Мітки: керування, механізмом, кранового, спосіб, візка, переміщення
Формула / Реферат:
Спосіб керування механізмом переміщення кранового візка, що включає вимірювання довжини каната, на якому підвішений вантаж, визначення часу розгону кранового візка або його гальмування, здійснення розгону кранового візка до встановленої номінальної швидкості та його гальмування, який відрізняється тим, що згаданий розгін здійснюють по визначеному закону зміни швидкості:
Спосіб керування електродвигуном механізму підйому вантажу мостового крана
Номер патенту: 85763
Опубліковано: 25.11.2013
Автори: Ромасевич Юрій Олександрович, Годун Василь Анатолійович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/22
Мітки: підйому, мостового, механізму, керування, електродвигуном, крана, вантажу, спосіб
Формула / Реферат:
Спосіб керування електродвигуном механізму підйому вантажу мостового крана, при якому рух механізму підйому вантажу виконують за неперервною функцією від аргументу часу з усуненням коливань вантажу у кінці перехідного процесу, який відрізняється тим, що рух електродвигуна механізму підйому вантажу розділений на три етапи: на першому - електродвигун розганяють і він певний час обертається на посадочній швидкості; на другому - виконують розгін...
Попередній патент: Спосіб вирощування щеплених саджанців винограду
Наступний патент: Механізм зміни вильоту баштового крана
Випадковий патент: Пристрій для вимірювання маси рідких продуктів в закритих посудинах