Навігаційний пристрій для вибору виду вектора управління рухом
Номер патенту: 111646
Опубліковано: 25.11.2016
Автори: Голіков Володимир Володимирович, Мальцев Станіслав Едуардович

Формула / Реферат
Навігаційний пристрій для вибору виду вектора управління рухом, що містить систему первинної обробки, яка включає сполучені між собою блок координат шляхових точок, блок розрахунку кутів повороту, блок розрахунку координат траєкторних точок, зв'язану з системою вторинної обробки, що містить електронну обчислювальну машину (ЕОМ), зв'язану з індикатором, що має дисплей, блок органів керування, який відрізняється тим, що система первинної обробки додатково включає блок постійних і змінних даних про характеристики судна, блок розрахунку маневрових характеристик, пов'язаний з блоком розрахунку матриць траєкторних точок (далі - ТТ) поворотів, матриць ТТ лінійних ділянок шляху і блоком формування сумарної планової матриці ТТ, блоки даних про характеристики параметрів зовнішніх впливів, а саме - блок розрахунку вектора вітрового дрейфу прямолінійних відрізків шляху, блок розрахунку векторів зсуву від хвилювання, блоком розрахунку векторів зсуву припливною-відливною та вітровою течією, які зв'язані між собою і з системою вторинної обробки через блок перерахунку обсервованих координат на центр ваги, блок вибору геометричного вектора по умовах плавання, сполучений через блок вибору експлуатаційної швидкості та трипозиційний перемикач з системою вторинної обробки, система вторинної обробки містить блок зв'язаного вектора, блок аналізатора зовнішніх впливів по умовах плавання, пов'язаний із системою первинної обробки через ЕОМ і блок зв'язаного вектора, блок коригування швидкості руху зв'язаний з блоком датчиків координат, а індикатор додатково містить блок переключення векторів та блок виконання письмового числення.
Текст
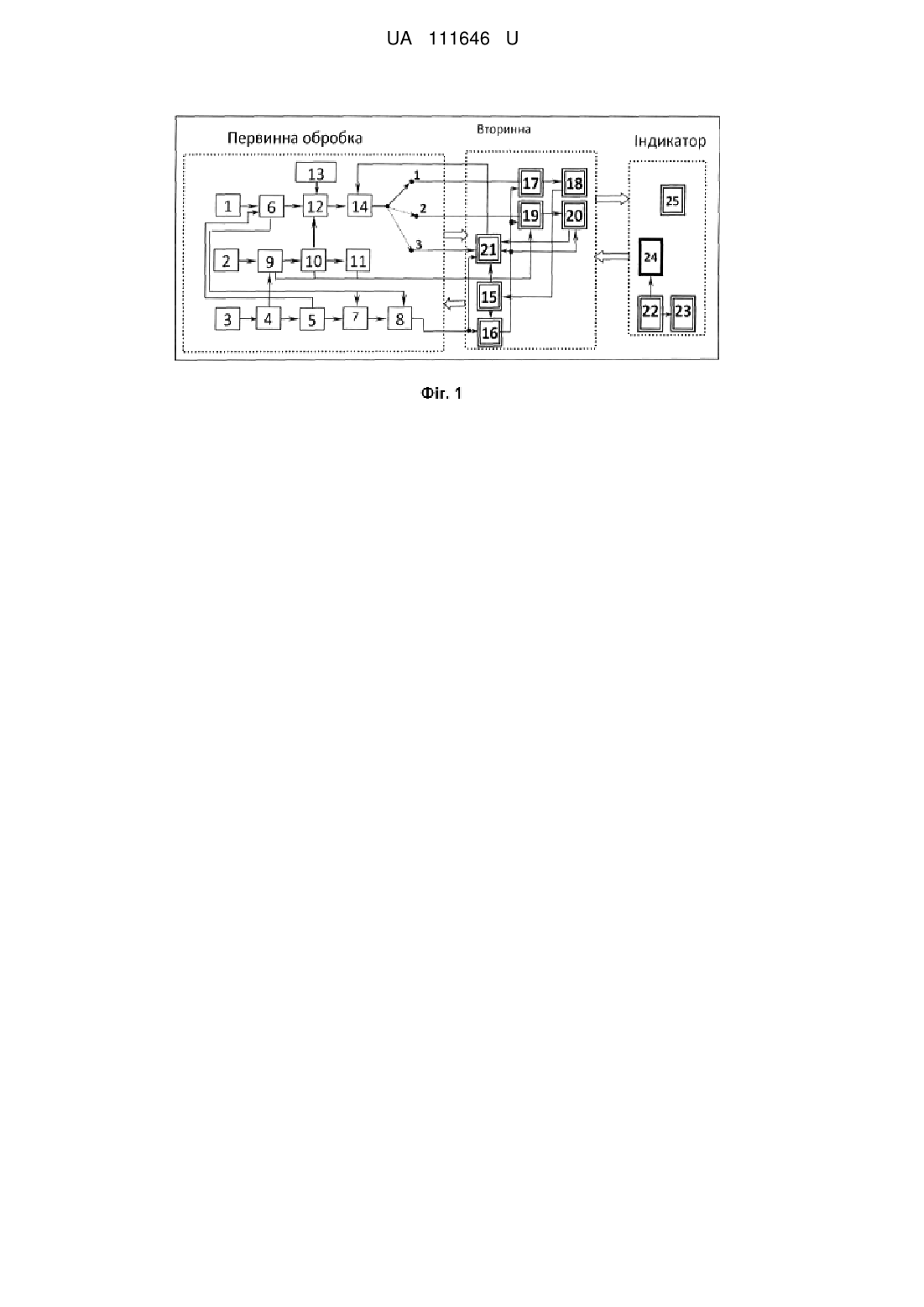
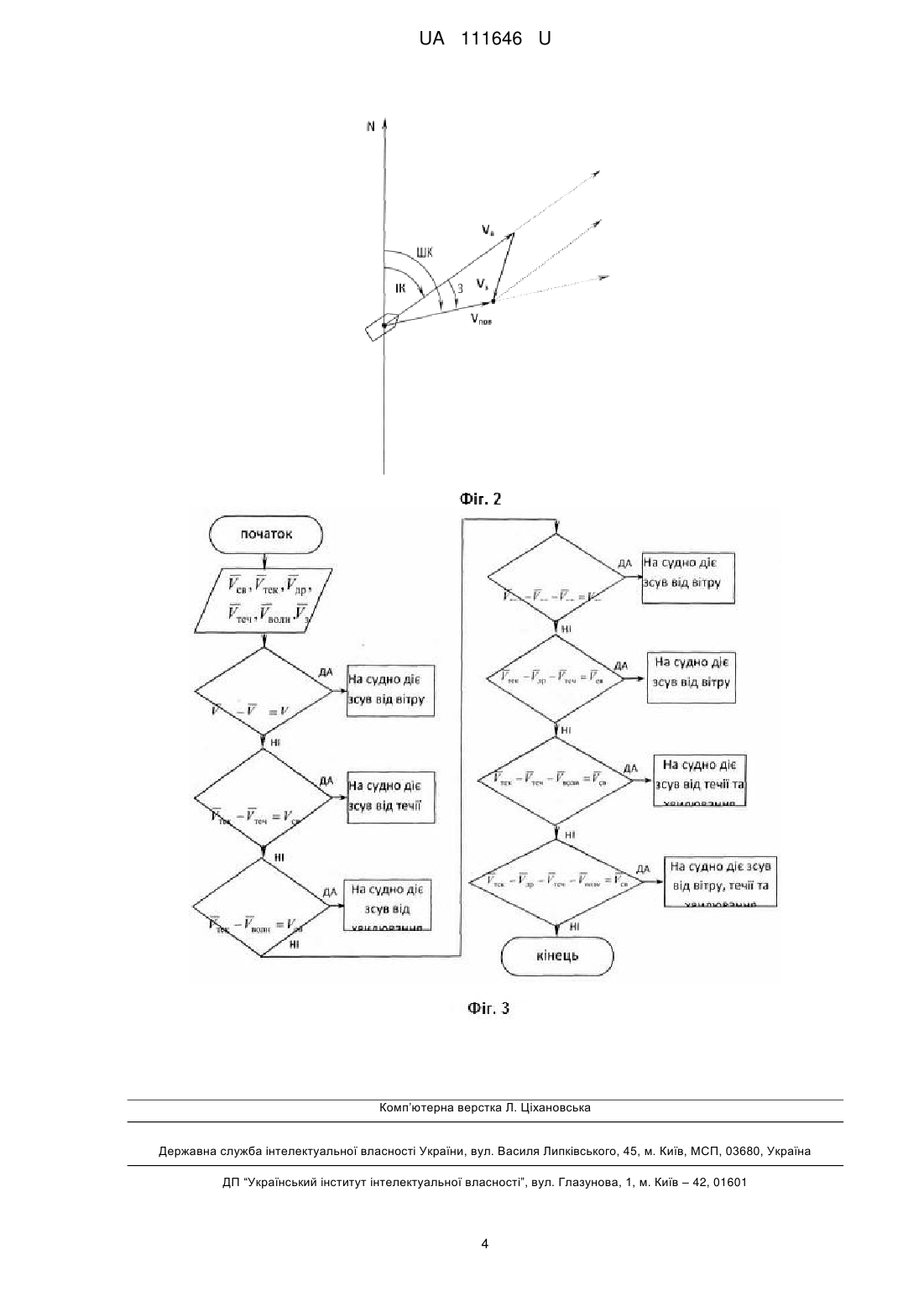
Реферат: Навігаційний пристрій для вибору виду вектора управління рухом містить систему первинної обробки, зв'язану з системою вторинної обробки, зв'язаною з індикатором. Система первинної обробки містить сполучені між собою блок координат шляхових точок, блок розрахунку кутів повороту, блок розрахунку координат траєкторних точок, блок постійних і змінних даних про характеристики судна, блок розрахунку маневрових характеристик, зв'язаний з блоком розрахунку матриць траєкторних точок (далі - ТТ) поворотів, матриць ТТ лінійних ділянок шляху і блоком формування сумарної планової матриці ТТ, блоки даних про характеристики параметрів зовнішніх впливів, а саме - блок розрахунку вектора вітрового дрейфу прямолінійних відрізків шляху, блок розрахунку векторів зсуву від хвилювання, блоком розрахунку векторів зсуву припливною-відливною та вітровою течією, які зв'язані між собою і з системою вторинної обробки через блок перерахунку обсервованих координат на центр ваги, блок вибору геометричного вектора по умовах плавання, сполучений через блок вибору експлуатаційної швидкості та трипозиційний перемикач з системою вторинної обробки. Система вторинної обробки містить блок зв'язаного вектора, блок аналізатора зовнішніх впливів по умовах плавання, зв'язаний із системою первинної обробки через електронну обчислювальну машину (ЕОМ) і блок зв'язаного вектора, блок коригування швидкості руху, зв'язаний з блоком датчиків координат. Індикатор має дисплей, блок органів керування та додатково містить блок переключення векторів та блок виконання письмового числення. UA 111646 U (12) UA 111646 U UA 111646 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до засобів автоматизованого планування і управління рухом судна і використовується як засіб автоматичного контролю переміщення судна по водному шляху оптимальним способом. Найбільш близьким по технічній суті є пристрій для попередження посадки судна на мілину (KM України № 57713, МПК G08G3/00, опубл. 10.03.2011, бюл. № 5), що містить блок координат шляхових точок, блок розрахунку кута повороту, блок вибору кута перекладки руля, блок розрахунку координат шляхових точок, які входять в систему первинної обробки, зв'язану з системою вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення траєкторії судна, блок органів керування. Система первинної обробки інформації містить блок розрахунку координат траєкторії руху між шляховими точками суден на підставі інформації, яка надходить з блока визначення шляхових точок і параметрів повороткості, який підключено до системи вторинної обробки і індикації координат шляху судна. Недоліками даного пристрою є неможливість за допомогою даного пристрою виконання розрахунку матриці траєкторних точок (ТТ) прямолінійних і криволінійних відрізків і аналізу навігаційних умов руху, що не дає змоги використовувати пристрій як систему підтримки прийняття рішень по маневруванню, що призводить до значної затримки у виборі оптимальної структури системи управління рухом, адекватної навігаційним умовам. В основу корисної моделі поставлено задачу створення навігаційного пристрою шляхом удосконалення системи первинної обробки, системи вторинної обробки та індикатора, і за рахунок інформаційного забезпечення маневрування при переміщенні по водному шляху та визначенню характеру зовнішніх впливів забезпечити своєчасне виявлення появи зовнішніх впливів і вибору оптимального вектора управління, що відповідає існуючим навігаційним умовам плавання. Поставлена задача вирішується тим, що у відомому пристрої для попередження посадки судна на мілину, що містить систему первинної обробки, яка включає сполучені між собою блок координат шляхових точок, блок розрахунку кутів повороту, блок розрахунку координат шляхових точок, зв'язану з системою вторинної обробки, що містить електронну обчислювальну машину (далі - ЕОМ), зв'язану з індикатором, що має дисплей, блок органів керування, згідно з корисною моделлю, система первинної обробки додатково включає блок постійних і змінних даних про характеристики судна, блок розрахунку маневрових характеристик, зв'язаний з блоком розрахунку матриць траєкторних точок (далі - ТТ) повороту, матриць ТТ лінійних ділянок шляху і блоком формування сумарної планової матриці ТТ, блоки даних про характеристики параметрів зовнішніх впливів, а саме - блок розрахунку вектора вітрового дрейфу прямолінійних відрізків шляху, блок розрахунку векторів зсуву від хвилювання, блоком розрахунку векторів зсуву припливною-відливною та вітровою течією, які зв'язані між собою і з системою вторинної обробки через блок перерахунку обсервованих координат на центр ваги, блок вибору геометричного вектора по умовах плавання, сполучений через блок вибору експлуатаційної швидкості та трипозиційний перемикач з системою вторинної обробки, система вторинної обробки містить блок зв'язаного вектора, блок аналізатора зовнішніх впливів по умовах плавання, зв'язаний із системою первинної обробки через ЕОМ і блок зв'язаного вектора, блок коригування швидкості руху, зв'язаний з блоком датчиків координат, а індикатор додатково містить блок переключення векторів та блок виконання письмового числення. Причинно-наслідковий зв'язок між сукупністю ознак заявленого пристрою і технічним результатом, що досягається, полягає у наступному. Запропонований навігаційний пристрій забезпечує зниження ризику виникнення аварійних пригод за рахунок підвищеної точності планування ТТ, а саме шляхом високоточного розрахунку вільного вектора і як результат отримання оптимального плану руху у вигляді матриці переходу. Застосування блоків даних про характеристики параметрів зовнішніх впливів, а саме - блока розрахунку вектора вітрового дрейфу прямолінійних відрізків шляху, блока розрахунку векторів зсуву від хвилювання, блока розрахунку векторів зсуву припливною-відливною та вітровою течією, забезпечує можливість розрахунку вільного, пов'язаного або ковзного векторів по умовах плавання та аналіз характеру зовнішнього впливу на відхилення від заданого шляху. Введення блока постійних і змінних даних про характеристики судна забезпечує розрахунок маневрених характеристик і режим руху судна. Блок розрахунку матриць ТТ повороту, матриць ТТ лінійних ділянок шляху і блок формування сумарної планової матриці ТТ забезпечує отримання високоточних координат заданого гарантовано безпечного шляху. 1 UA 111646 U 5 10 15 20 25 30 35 40 45 50 55 Блок перерахунку обсервованих координат на центр ваги забезпечує отримання високоточних координат точки центра ваги судна, що підвищує точність оцінки відхилення судна від планових ТТ. Блок вибору геометричного вектора по умовах плавання забезпечує отримання величини сумарного відхилення від планових ТТ. Блок аналізатора зовнішніх впливів забезпечує почергове віднімання векторів зовнішніх впливів від результуючого і порівняння його з вільним вектором та визначення характеру впливу. Блок зв'язаного вектора забезпечує визначення сумарного зміщення судна відносно планової траєкторії. Блок коригування швидкості руху забезпечує вибір швидкості руху для забезпечення переміщення по заданих ТТ. Блок датчиків координат забезпечує високоточні координати приймальної антени супутника. Блок переключення векторів забезпечує вибір способу управління, адекватного умовам плавання. Блок виконання письмового числення забезпечує визначення координат по параметрах курсу і швидкості. Суть корисної моделі пояснюється кресленнями. На фіг. 1 зображена блок-схема пристрою; на фіг. 2 - графічна схема складання векторів; на фіг. 3 – блок-схема аналізатора зовнішніх впливів і визначення їх характеру. Навігаційний пристрій для вибору виду вектора управління рухом включає систему первинної обробки, що містить блок постійних і змінних даних про судно 1, базу довголітніх даних 2, блок вводу координат шляхових точок 3, який зв'язаний з блоком розрахунку істинних курсів і плавання по них від попередньої до наступної шляхової точки (далі - ШТ) 4, блок розрахунку кутів повороту 5 із попередньої точки в наступну шляхову і вибору кута перекладки руля, які зв'язані з блоком розрахунку маневрових характеристик 6, який зв'язаний з блоком постійних і змінних даних про судно 1 та блоками розрахунку матриць траєкторних точок (далі ТТ) повороту 7 і блоком розрахунку лінійних матриць ТТ та сумарної планової матриці ТТ переходу 8, блок розрахунку вектора вітрового дрейфу прямолінійних відрізків шляху 9, блок розрахунку векторів зсуву хвилюванням 10, блок розрахунку векторів зсуву припливноювідливною та вітровою течією 11, блок вибору експлуатаційної швидкості 12, зв'язаний з блоком вибору геометричного вектора по умовах плавання 13 та з трипозиційним перемикачем 14, що зв'язаний з системою вторинної обробки, яка містить блок датчиків координат (чи визначення місця високоточним способом) 15, зв'язаний з блоком перерахунку координат приймальної антени на центр ваги 16, зв'язаний через блок розрахунку істинного курсу в наступну шляхову точку 17 з блоком коригування швидкості руху 18, блок зв'язаного вектора 19, зв'язаний з блоком аналізатора зовнішніх впливів 20 та системою первинної обробки, ЕОМ 21, зв'язаний з системою вторинної обробки індикатор містить блок органів керування 22, зв'язаний з блоком переключання векторів 23 та блоком письмового числення 24, який на екрані індикатора 25 відображає рух судна. Навігаційний пристрій для вибору виду вектора управління рухом працює наступним чином. Після вводу в блок 3 координат шляхових точок в блоці 4 розраховують істині курси і плавання по них, в подальшому в блоці 5 розраховують кути повороту із попередньої в наступну і вибір кутів перекладки руля для розрахунку матриць ТТ повороту в блоці 7, ТТ розрахунку лінійних матриць і формування планової матриці переходу в блоці 8. Після того, як сформована планова траєкторія, виконується розрахунок векторів V др дрейфу від вітру для текучого відрізка руху в блоці 9, векторів V в олн дрейфу від хвилі для текучого відрізка руху в блоці 10, векторів V теч дрейфу від течії для текучого відрізка руху в блоці 11, з подальшим вибором експлуатаційної швидкості переходу в блоці 12 і відповідного району плавання в блоці 13 і визначення положення трипозиційного перемикача в блоці 14 по району плавання положення: "1" - відкрите море, "2" - плавання в стисних умовах, "3" - на каналах та фарватерах. При надходженні даних до системи вторинної обробки в блок датчика координат 15 та блок перерахунку координат на центр ваги судна 16 визначають відхилення від планових координат, і при відхиленні більше, чим припустиме, розраховують істинний курс в наступну шляхову точку в блоці 17 та коригують швидкість руху в блоці 18. В подальшому виконують геометричне визначення зв'язаного вектора в блоці 19 (фіг. 3) та аналізують зовнішні впливи і визначають їх характер в блоці 20 (фіг. 2). Далі проводять індикацію для прийняття рішення по вибору вектора управління через ЕОМ 21 на блок трипозиційного перемикача 14. 2 UA 111646 U 5 При положенні перемикача 14 в положенні "3" блок переключення векторів 22 розраховує високоточне бокове відхилення і коректуру кута перекладки руля для утримання ЦВ на планових ТТ. В блоці органів керування 23 проводять коригування руху судна, включаючи контроль письмового числення 24. Після цього сигнал надходить на дисплей 25 індикатора і на ньому отримують графічну схему руху і другу інформацію по управлінню. Застосування даного пристрою дозволить судноводію оперативно управляти рухом судна, шляхом контролю за зовнішніми впливами і дасть можливість скоригувати рух, коли виникають аварійні ситуації, та забезпечити уникнення надмірного наближення до небезпеки. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 Навігаційний пристрій для вибору виду вектора управління рухом, що містить систему первинної обробки, яка включає сполучені між собою блок координат шляхових точок, блок розрахунку кутів повороту, блок розрахунку координат траєкторних точок, зв'язану з системою вторинної обробки, що містить електронну обчислювальну машину (ЕОМ), зв'язану з індикатором, що має дисплей, блок органів керування, який відрізняється тим, що система первинної обробки додатково включає блок постійних і змінних даних про характеристики судна, блок розрахунку маневрових характеристик, пов'язаний з блоком розрахунку матриць траєкторних точок (далі - ТТ) поворотів, матриць ТТ лінійних ділянок шляху і блоком формування сумарної планової матриці ТТ, блоки даних про характеристики параметрів зовнішніх впливів, а саме - блок розрахунку вектора вітрового дрейфу прямолінійних відрізків шляху, блок розрахунку векторів зсуву від хвилювання, блоком розрахунку векторів зсуву припливною-відливною та вітровою течією, які зв'язані між собою і з системою вторинної обробки через блок перерахунку обсервованих координат на центр ваги, блок вибору геометричного вектора по умовах плавання, сполучений через блок вибору експлуатаційної швидкості та трипозиційний перемикач з системою вторинної обробки, система вторинної обробки містить блок зв'язаного вектора, блок аналізатора зовнішніх впливів по умовах плавання, пов'язаний із системою первинної обробки через ЕОМ і блок зв'язаного вектора, блок коригування швидкості руху зв'язаний з блоком датчиків координат, а індикатор додатково містить блок переключення векторів та блок виконання письмового числення. 3 UA 111646 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 3/00
Мітки: пристрій, рухом, виду, вектора, вибору, навігаційний, управління
Код посилання
<a href="https://ua.patents.su/6-111646-navigacijjnijj-pristrijj-dlya-viboru-vidu-vektora-upravlinnya-rukhom.html" target="_blank" rel="follow" title="База патентів України">Навігаційний пристрій для вибору виду вектора управління рухом</a>
Пристрій для інформаційного забезпечення процесу управління судном
Номер патенту: 97227
Опубліковано: 10.03.2015
Автори: Бень Андрій Павлович, Товстокорий Олег Миколаєвич, Мальцев Станіслав Едуардович
МПК: G08G 3/00
Мітки: процесу, судном, забезпечення, управління, інформаційного, пристрій
Формула / Реферат:
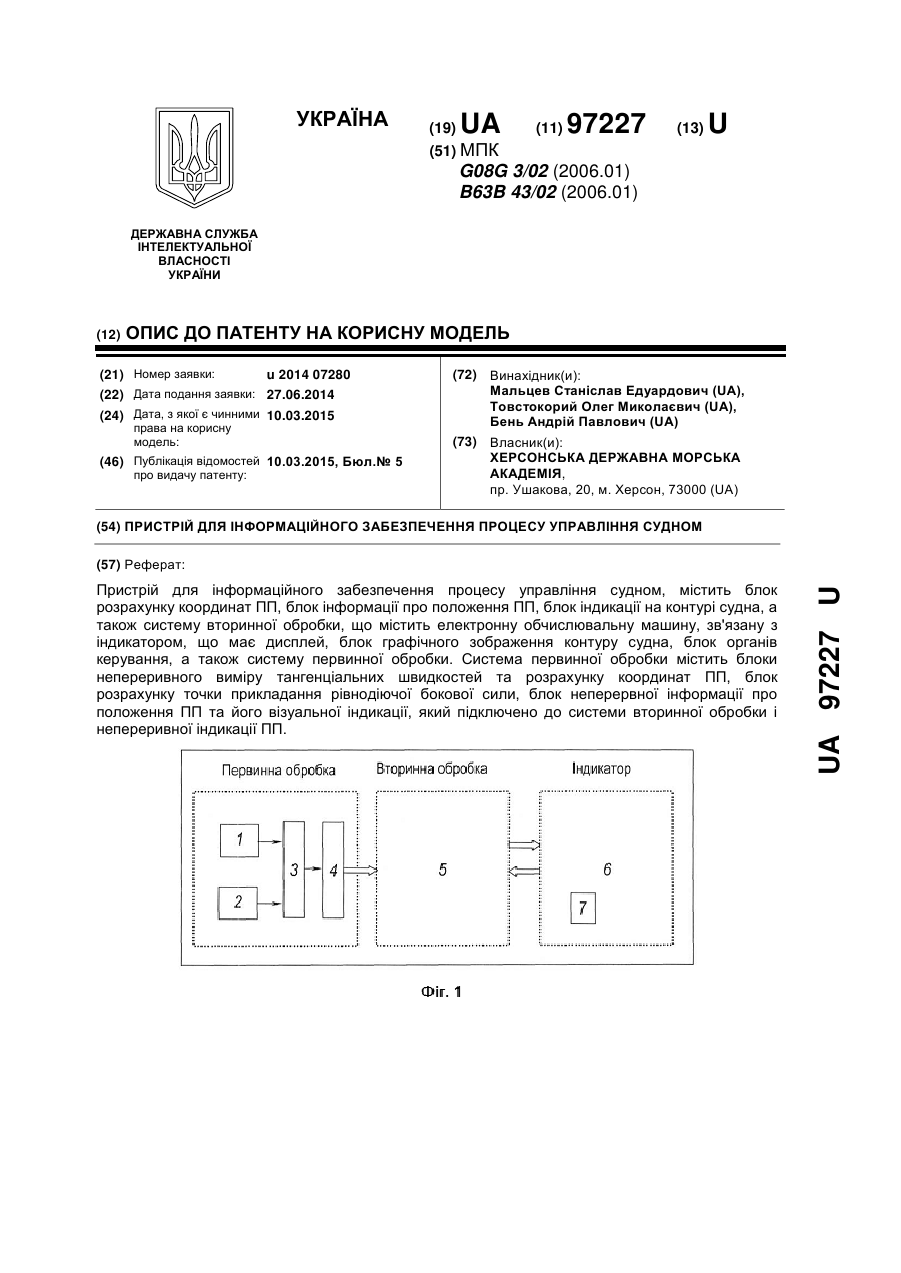
Пристрій для інформаційного забезпечення процесу управління судном, що містить блок розрахунку координат ПП, блок інформації про положення ПП, блок індикації на контурі судна, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення контуру судна, блок органів керування, а також систему первинної обробки, яка відрізняється тим, що система первинної...
Пристрій для попередження посадки судна на мілину
Номер патенту: 57713
Опубліковано: 10.03.2011
Автори: Мальцев Анатолій Сідорович, Соколенко Василь Інокентійович, Ворохобін Ігор Ігорович
МПК: G08G 3/00
Мітки: мілину, судна, пристрій, попередження, посадки
Формула / Реферат:
Пристрій для попередження посадки судна на мілину, що містить блок координат шляхових точок, блок розрахунку кута повороту, блок вибору кута перекладки руля, блок розрахунку координат шляхових точок, включаючи криволінійну траєкторію при повороті, а також систему вторинної обробки, яка містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення траєкторії судна, блок органів керування, який...
Пристрій для інформаційного забезпечення лоцманської проводки морського судна
Номер патенту: 78679
Опубліковано: 25.03.2013
Автори: Мальцев Анатолій Сідорович, Голіков Володимир Володимирович, Соколенко Василь Іннокентійович, Ворохобін Ігор Ігорович
МПК: B63B 49/00, G08G 3/00
Мітки: судна, проводки, інформаційного, забезпечення, пристрій, лоцманської, морського
Формула / Реферат:
Пристрій для інформаційного забезпечення лоцманської проводки морського судна, що містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, зв'язані з блоком перерахунку координат на центр ваги, зв'язаний з блоком розрахунку характеристик повороткості, який в свою чергу зв'язаний з блоком розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій, система...
Спосіб управління рухом сідлового автопоїзда й пристрій для його здійснення
Номер патенту: 46239
Опубліковано: 15.05.2002
Автори: Агафонов Юрій Миколайович, П'янков Анатолій Андрійович, Піскачов Олександр Іванович
МПК: B62D 13/00, B62D 53/00
Мітки: рухом, здійснення, спосіб, пристрій, сідлового, автопоїзда, управління
Формула / Реферат:
1. Спосіб управління курсовим рухом сідлового автопоїзда, здебільшого з неповоротними відносно рами колесами напівпричепа, при якому вимірюють поточне значення кута складання тягача з напівпричепом і завертають колеса тягача, які управляються, на кут у залежності від зміни величин параметрів, які вимірюються, який відрізняється тим, що задають кут необхідного напрямку руху автопоїзда заднім ходом, вимірюють поточне значення різниці між...
Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення
Номер патенту: 89389
Опубліковано: 25.04.2014
Автори: Сафін Ігор Вікторович, Голіков Володимир Володимирович, Мальцев Анатолій Сідорович, Мамонтов Володимир Володимирович
МПК: G08G 3/00
Мітки: надмірного, судном, управління, пристрій, наближення, інформаційного, процесу, забезпечення, небезпечного
Формула / Реферат:
Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення, що включає систему первинної обробки, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок органів керування, який відрізняється тим, що система первинної обробки містить блок даних про координати суден, що спостерігаються, блок розрахунку відстані від власного судна...
Попередній патент: Спосіб дезінфекції об’єктів тваринництва при туберкульозі
Наступний патент: Спосіб моделювання йододефіцитних станів з додаванням струмогенних продуктів
Випадковий патент: Спосіб одержання біопалива