3-алкокси, тіоалкіл і аміно-4-аміно-6-(заміщені) піколінати та їхнє застосування як гербіцидів
Номер патенту: 113412
Опубліковано: 25.01.2017
Автори: Ренга Джеймс М., Епп Джефрі Б., Гуентенспбергер Кетрін А., Джамп'єтро Наталі Крістін, Лоу Крістіан Т., Фішер Ліндсі Гейл, Кістер Джеремі, Сіддалл Томас Л., Шміцер Пол Р., Рот Джошуа, Йоркіс Карла Н., Екельбергер Джозеф Д.

Формула / Реферат
1. Сполука формули А:
 ,
,
у якій
Q являє собою С1-С4 алкокси, С1-С4 галоалкокси, SR3 або NR1R2;
Х являє собою Н або галоген;
Υ являє собою F, Сl, С1-С6 алкіл, С1-С6 галоалкіл, С2-С6 алкеніл, C2-C6 галоалкеніл, С3-С7 циклоалкіл, С3-С7 галоциклоалкіл або Аr;
Аr являє собою фенільну групу або піридин, заміщений одним - чотирма замісниками, незалежно вибраними з галогену, нітро, ціано, формілу, С1-С6 алкілу, С3-С7 циклоалкілу, С2-С6 алкенілу, С2-С6 алкінілу, С1-С6 алкокси, С2-С4 алкоксіалкілу, С2-С6 алкілкарбонілу, С1-С6 алкілтіо, С1-С6 алкілсульфінілу, С1-С6 алкілсульфонілу, С2-С4 алкенілокси, С2-С4 алкінілокси, С2-С4 алкенілтіо, С2-С4 алкінілтіо, С1-С6 галоалкілу, С3-С7 галоциклоалкілу, С2-С6 галоалкенілу, С2-С6 галоалкінілу, С1-С6 галоалкокси, С2-С4 галоалкоксіалкілу, С2-С6 галоалкілкарбонілу, С1-С6галоалкілтіо, С1-С6 галоалкілсульфінілу, С1-С6 галоалкілсульфонілу, С3-С6 триалкілсилілу, С2-С4 галоалкенілокси, С2-С4 галоалкінілокси, С2-С4 галоалкенілтіо, С2-С4 галоалкінілтіо, -ОСН2СН2-, -ОСН2СН2СН2- -ОСН2О-, -ОСН2СН2О- -C(O)OR3, -C(O)NR3R4, -CR4NOR3, -NH2, -NR3R4, -NR4OR3, -NR4SO2R3, -NR4C(O)R3, -NR4C(O)OR3, -NR4C(O)NR3R4 або -NCR4NR3R4;
R1 і R2 незалежно являють собою Η, С1-С6 алкіл або С1-С6 ацил;
R3 являє собою С1-С4 алкіл або С1-С4 галоалкіл; і
R4 являє собою Н, С1-С4 алкіл або С1-С4 галоалкіл;
де зазначена сполука, відносно групи карбонової кислоти формули А, являє собою С1-С6 алкіловий складний ефір або бензиловий складний ефір, за умови, що
(а) Q являє собою SR3 або NR1R2; або
(b) Υ являє собою Аr і Аr являє собою пара-заміщений феніл, необов′язково додатково заміщений в інших положеннях замісниками, кожний з яких незалежно являє собою галоген або С1-С6 алкокси.
2. Сполука за п. 1, у якій Q являє собою С1-С4 алкокси або С1-С4 галоалкокси.
3. Сполука за п. 1, у якій Q являє собою SR3 або NR1R2.
4. Сполука за п. 1, у якій Q являє собою С1-С4 алкокси.
5. Сполука за п. 1, у якій Q являє собою метокси.
6. Сполука за п. 1, у якій X являє собою Η або F.
7. Сполука за п. 1, у якій Υ являє собою Аr.
8. Сполука за п. 1, у якій Аr являє собою пара-заміщений феніл, який необов′язково додатково заміщений в інших положеннях.
9. Сполука за п. 8, у якій Аr являє собою пара-заміщений феніл.
10. Сполука за п. 8, у якій Аr являє собою пара-заміщений феніл, необов′язково додатково заміщений 1-2 замісниками в інших положеннях.
11. Сполука за п. 8, у якій Аr являє собою пара-заміщений феніл, необов′язково додатково заміщений 3-4 замісниками в інших положеннях.
12. Сполука за п. 8, у якій Аr являє собою пара-заміщений феніл, необов′язково додатково заміщений в інших положеннях галогеном або С1-6 алкокси.
13. Сполука за п. 1, у якій:
a) Q являє собою метокси,
b) Х являє собою Н або F,
c) Υ являє собою пара-заміщений феніл, необов’язково додатково заміщений в інших положеннях, і
d) R1 і R2 незалежно являють собою Н.
14. Сполука, вибрана з:
3

4

5

6

7

8

9

14
15
16
17
18
19
20
21
22
23
24
25
26
27
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
66
67
68
69
74
75
76
78
80
86
87
88
89
93
94
 .
.
15. Гербіцидна композиція, що містить гербіцидно-ефективну кількість сполуки за п. 1 і сільськогосподарсько прийнятний допоміжний засіб або носій.
16. Спосіб приглушення росту небажаної рослинності, що включає контактування з рослинністю або місцем її виростання, або внесення до ґрунту, або воду для запобігання появі небажаної рослинності гербіцидно-ефективної кількості сполуки за п. 1.
Текст
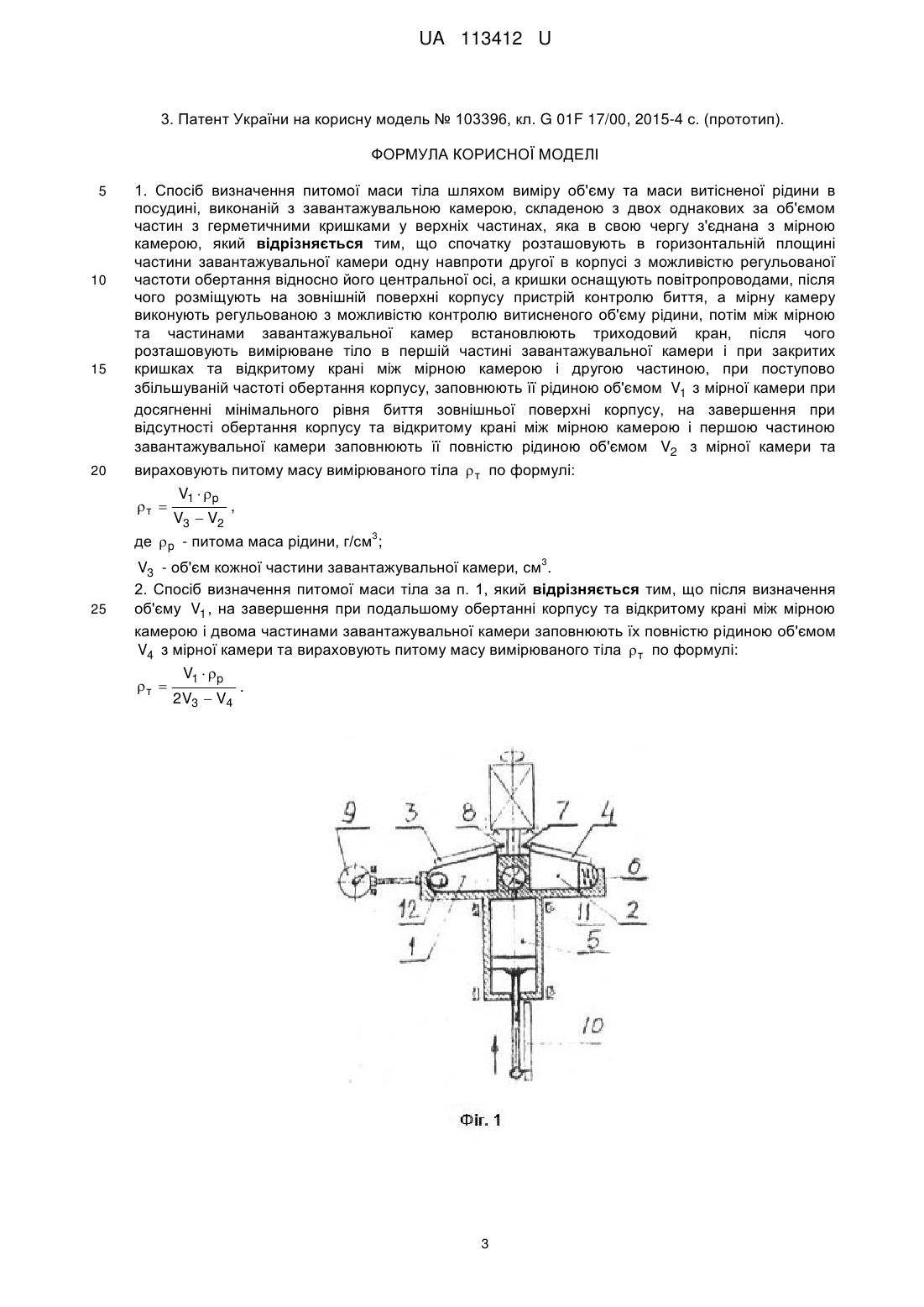
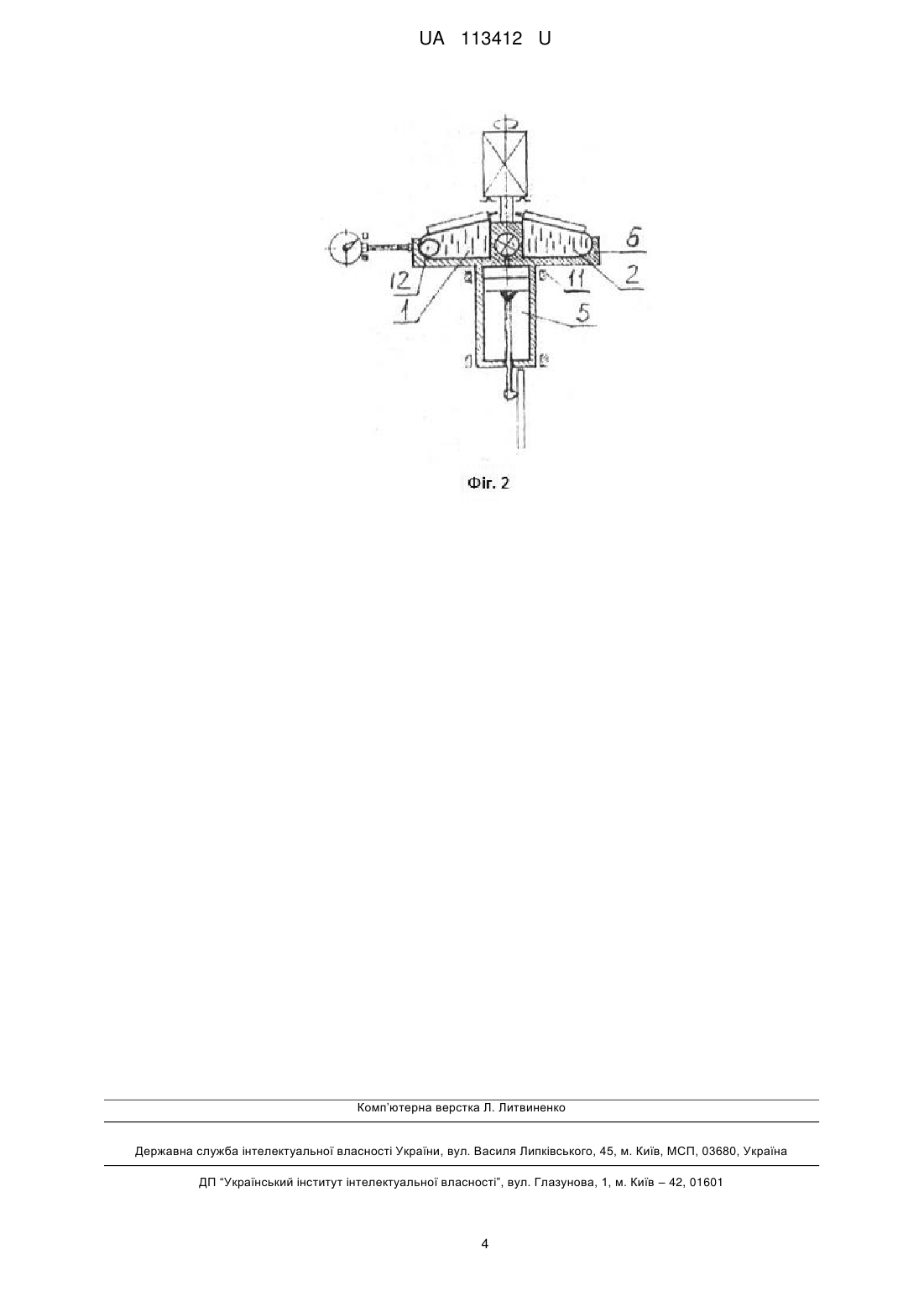
Реферат: Спосіб визначення питомої маси тіла шляхом виміру об'єму та маси витісненої рідини в посудині, виконаній з завантажувальною камерою, складеною з двох однакових за об'ємом частин з герметичними кришками у верхніх частинах, яка в свою чергу з'єднана з мірною камерою, причому спочатку розташовують в горизонтальній площині частини завантажувальної камери одну навпроти другої в корпусі з можливістю регульованої частоти обертання відносно його центральної осі, а кришки оснащують повітропроводами, після чого розміщують на зовнішній поверхні корпусу пристрій контролю биття, а мірну камеру виконують регульованою з можливістю контролю витисненого об'єму рідини, потім між мірною та частинами завантажувальної камер встановлюють триходовий кран, після чого розташовують вимірюване тіло в першій частині завантажувальної камери і при закритих кришках та відкритому крані між мірною камерою і другою частиною, при поступово збільшуваній частоті обертання корпусу, заповнюють її рідиною об'ємом V1 з мірної камери при досягненні мінімального рівня биття зовнішньої поверхні корпусу, на завершення при відсутності обертання корпусу та відкритому крані між мірною камерою і першою частиною завантажувальної камери заповнюють її повністю рідиною об'ємом V2 з мірної камери та вираховують питому масу вимірюваного тіла т по формулі: V1 p т , V3 V2 де p - питома маса рідини, г/см ; 3 3 V3 - об'єм кожної частини завантажувальної камери, см . UA 113412 U (12) UA 113412 U UA 113412 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки і може бути використана при визначенні питомої маси тіла в різних умовах дії сили тяжіння. Відомий спосіб [1] вимірювання об'єму рудного матеріалу шляхом використання пристрою складеного з двох частин - робочої камери, яку заповнюють рідиною, та мірної камери, до якої поступає витіснена рудним матеріалом рідина. Недоліком такого способу можна вважати недоцільну складність у використанні роздільного виконання мірної та робочої камери, та необхідність встановлення додаткової трубки зливу витісненої рідини до мірної камери. Відсутність даних про масу матеріалу не дозволяє швидко встановити питому масу матеріалу в різних умовах дії сили тяжіння. Відомий спосіб [2] визначення обсягу живих коренів, що складається з мірної посудини і каліброваної трубки, виконаних у вигляді U-подібної судини, та зливного крана для видалення води і коріння. Обсяг коренів визначається розрахунком, що враховує зміну обсягу рідини в каліброваній трубці і коефіцієнт перерахунку, залежний від співвідношення діаметрів трубки і мірної посудини. Недоліком такого способу є звуження технологічних можливостей при вимірюванні об'єму тіл більшого розміру, а також ускладнення кінцевих розрахунків через необхідність попереднього визначення точного коефіцієнта перерахунку. Окрім того запропонований спосіб також не дозволяє швидко встановити питому масу матеріалу в різних умовах дії сили тяжіння. Найбільш близьким за технічною сутністю і результатом, який досягається в корисній моделі, є спосіб [3] визначення об'єму тіла шляхом виміру об'єму витісненої рідини в посудині, виконаній з завантажувальною та мірною камерами, який виконують в наступній послідовності: - спочатку завантажувальну камеру виконують з двох однакових за обсягом частин, розташованих у вертикальній площині одна над іншою з герметичною кришкою у верхній частині і сполучених з мірною камерою з нульовими позначками та на кінцях; - після чого при відкритій кришці заповнюють рідиною посудину до нижньої нульової позначки на кінці мірної камери; - потім розміщують тіло у верхній частині і закривають кришку; - після чого повертають посудину в вертикальній площині на 180° і фіксують об'єм тіла за нового рівня в мірній камері від нижньої нульової позначки; - потім знову повертають посудину на 180°; - насамкінець після відкриття кришки витягують тіло з верхньої частини. У разі необхідності визначення допустимого відхилення об'єму тіла від еталонного дії виконують в наступній послідовності: - спочатку нижню частину також оснащують герметичною кришкою, а посередині мірної камери роблять нульову відмітку; - після чого при відкритій кришці верхньої частини розташовують в останній тіло з еталонним об'ємом; - потім при закритій кришці верхньої частини повертають посудину в вертикальній площині на 180° та при відкритій кришці верхньої частини посудину заповнюють рідиною до нульової відмітки; - після чого розміщують у верхній частині вимірюване тіло і закривають кришку; - на завершення повертають посудину в вертикальній площині на 180° і по відхиленню рівня рідини від нульової позначки судять про відхилення вимірюваного об'єму тіла від еталонного. Недоліком такого способу є звуження технологічних можливостей при необхідності визначення питомої маси тіла в різних умовах дії сили тяжіння. Задача корисної моделі полягає в розширенні його технологічних можливостей. Поставлена задача вирішується тим, що спосіб визначення питомої маси тіла здійснюється шляхом виміру об'єму та маси витісненої рідини в посудині, виконаній з завантажувальною камерою, складеною з двох однакових за об'ємом частин з герметичними кришками у верхніх частинах, яка в свою чергу з'єднана з мірною камерою та відрізняється тим, що, спочатку розташовують в горизонтальній площині частини завантажувальної камери одну навпроти другої в корпусі з можливістю регульованої частоти обертання відносно його центральної осі, а кришки оснащують повітропроводами після чого розміщують на зовнішній поверхні корпусу пристрій контролю биття, а мірну камеру виконують регульованою з можливістю контролю витисненого об'єму рідини, потім між мірною та частинами завантажувальної камер встановлюють триходовий кран, після чого розташовують вимірюване тіло в першій частині завантажувальної камери і при закритих кришках та відкритому крані між мірною камерою і другою частиною, при поступово збільшуваній частоті обертання корпусу, заповнюють її рідиною об'ємом V1 з мірної камери при досягненні мінімального рівня биття зовнішньої поверхні корпусу, на завершення при відсутності обертання корпусу та відкритому крані між 1 UA 113412 U мірною камерою і першою частиною завантажувальної камери заповнюють її повністю рідиною об'ємом V2 з мірної камери та вираховують питому масу вимірюваного тіла т по формулі: т V1 p , V3 V2 3 де p - питома маса рідини, г/см ; (1) 3 5 10 15 20 25 30 35 40 45 50 V3 - об'єм кожної частини завантажувальної камери, см . У разі необхідності визначення питомої маси в умовах відсутності дії сили тяжіння, наприклад в космічному просторі, спосіб визначення питомої маси тіла відрізняється тим, що після визначення об'єму V1 , на завершення при подальшому обертанні корпусу та відкритому крані між мірною камерою і двома частинами завантажувальної камери заповнюють їх повністю рідиною об'ємом V4 з мірної камери та вираховують питому масу вимірюваного тіла т по формулі: V1 p . (2) т 2V3 V4 На фіг. 1 - зображений у розрізі зовнішній вигляд пристрою на етапі поступово збільшуваній частоті обертання корпусу, та заповненні другої частини завантажувальної камери рідиною об'ємом V1 з мірної камери при досягненні мінімального рівня биття зовнішньої поверхні корпусу; на фіг. 2 - зовнішній вигляд пристрою у розрізі на завершальному етапі при визначенні питомої маси в умовах відсутність дії сили тяжіння. Реалізація запропонованого способу визначення питомої маси тіла шляхом виміру об'єму та маси витісненої рідини в посудині, виконаній з завантажувальною камерою, складеною з двох однакових за об'ємом частин 1 та 2 з герметичними кришками 3 та 4 у верхніх частинах, яка в свою чергу з'єднана з мірною камерою 5 включає наступну послідовність: - спочатку розташовують в горизонтальній площині частини 1 та 2 завантажувальної камери одну навпроти другої в корпусі 6 з можливістю регульованої частоти обертання відносно його центральної осі (наприклад за допомогою двигуна - показаний умовно), а кришки оснащують повітропроводами 7 та 8; - після чого розміщують на зовнішній поверхні корпусу 5 пристрій контролю биття 9, наприклад індикатор годинникового типу, а мірну камеру виконують регульованою з можливістю контролю витисненого об'єму рідини наприклад за допомогою мірного пристрою 10; - потім між мірною 5 та частинами 1 та 2 завантажувальної камер встановлюють триходовий кран 11; - після чого розташовують вимірюване тіло 12 в першій частині завантажувальної камери 1 і при закритих кришках 3 та 4 та відкритому крані 11 між мірною камерою 5 і другою частиною 2, при поступово збільшуваній частоті обертання корпусу 6, заповнюють її рідиною об'ємом V1 з мірної камери 5 при досягненні мінімального рівня биття, за показниками індикатору 9, зовнішньої поверхні корпусу 6 (Фіг. 1); - на завершення при відсутності обертання корпусу 6 та відкритому крані 11 між мірною камерою 5 і першою частиною 1 завантажувальної камери заповнюють її повністю рідиною об'ємом V2 з мірної камери та вираховують питому масу вимірюваного тіла т по формулі (1). Якщо потрібно визначити питому масу тіла в умовах відсутності дії сили тяжіння, наприклад в космічному просторі, спосіб визначення питомої маси тіла 12 відрізняється тим, що після визначення об'єму V1 , на завершальному етапі та при подальшому обертанні корпусу 6 а також відкритому крані 11 між мірною камерою 5 і двома частинами 1 і 2 завантажувальної камери заповнюють їх повністю рідиною об'ємом V4 з мірної камери (Фіг. 2) та вираховують питому масу вимірюваного тіла т по формулі (2). Запропонований спосіб має перевагу в порівнянні з відомим, тому що розширює технологічні можливості і шляхом послідовних дій дозволяє визначити масу та об'єм вимірюваного тіла як при дії земного тяжіння, так і при його відсутності. Задача корисної моделі полягає в розширенні його технологічних можливостей. Джерела інформації: 1. М.Н. Альбов "Опробирование при разведке и добыче металлических руд и россыпей", М., 1943 г., 134 с., (с. 10-11). 2. Патент СРСР № 1817833, G 01 F 17/00, 1991-3 с. 3. Патент СРСР № 1817833, G 01 F 17/00, 1991-3 с. 2 UA 113412 U 3. Патент України на корисну модель № 103396, кл. G 01F 17/00, 2015-4 с. (прототип). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 1. Спосіб визначення питомої маси тіла шляхом виміру об'єму та маси витісненої рідини в посудині, виконаній з завантажувальною камерою, складеною з двох однакових за об'ємом частин з герметичними кришками у верхніх частинах, яка в свою чергу з'єднана з мірною камерою, який відрізняється тим, що спочатку розташовують в горизонтальній площині частини завантажувальної камери одну навпроти другої в корпусі з можливістю регульованої частоти обертання відносно його центральної осі, а кришки оснащують повітропроводами, після чого розміщують на зовнішній поверхні корпусу пристрій контролю биття, а мірну камеру виконують регульованою з можливістю контролю витисненого об'єму рідини, потім між мірною та частинами завантажувальної камер встановлюють триходовий кран, після чого розташовують вимірюване тіло в першій частині завантажувальної камери і при закритих кришках та відкритому крані між мірною камерою і другою частиною, при поступово збільшуваній частоті обертання корпусу, заповнюють її рідиною об'ємом V1 з мірної камери при досягненні мінімального рівня биття зовнішньої поверхні корпусу, на завершення при відсутності обертання корпусу та відкритому крані між мірною камерою і першою частиною завантажувальної камери заповнюють її повністю рідиною об'ємом V2 з мірної камери та вираховують питому масу вимірюваного тіла т по формулі: V1 p т , V3 V2 де p - питома маса рідини, г/см ; 3 3 25 V3 - об'єм кожної частини завантажувальної камери, см . 2. Спосіб визначення питомої маси тіла за п. 1, який відрізняється тим, що після визначення об'єму V1 , на завершення при подальшому обертанні корпусу та відкритому крані між мірною камерою і двома частинами завантажувальної камери заповнюють їх повністю рідиною об'ємом V4 з мірної камери та вираховують питому масу вимірюваного тіла т по формулі: т V1 p 2V3 V4 . 3 UA 113412 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійською3-alkoxy, thioalkyl and amino-4-amino-6-(substituted)picolinates and their use as herbicides
Автори англійськоюEpp, Jeffrey, B., Lowe, Christian, T., Renga, James, M., Schmitzer, Paul, R., Eckelbarger, Joseph, D., Guenthenspberger, Katherine, A., Siddall, Thomas, L., Yerkes, Carla, N., Fischer, Lindsey, Gayle, Giampietro, Natalie, Christine, Kister, Jeremy, Roth, Joshua
Автори російськоюЭпп Джефри Б., Лоу Кристиан Т., Ренга Джэймс М., Шмицер Пол Р., Экельбергер Джозеф Д., Гуентенспбергер Кетрин А., Сиддалл Томас Л., Йоркис Карла Н., Фишер Линдси Гэйл, Джампьетро Натали Кристин, Кистер Джереми, Рот Джошуа
МПК / Мітки
МПК: C07F 7/08, A01N 55/00, A01N 43/40, C07D 213/73, A01N 55/10, C07D 405/04, C07D 213/79, C07D 213/65
Мітки: 3-алкокси, їхнє, застосування, аміно-4-аміно-6-(заміщені, піколінати, тіоалкіл, гербіцидів
Код посилання
<a href="https://ua.patents.su/6-113412-3-alkoksi-tioalkil-i-amino-4-amino-6-zamishheni-pikolinati-ta-khneh-zastosuvannya-yak-gerbicidiv.html" target="_blank" rel="follow" title="База патентів України">3-алкокси, тіоалкіл і аміно-4-аміно-6-(заміщені) піколінати та їхнє застосування як гербіцидів</a>
Заміщені похідні оксіндолу та їхнє застосування для лікування захворювань, залежних від вазопресину
Номер патенту: 106200
Опубліковано: 11.08.2014
Автори: УНГЕР Ліліане, Оост Торстен, Нетц Астрід, ЛУБІШ Вільфрід, Брайє Вілфрід, Вернет Вольфганг, Хорнбергер Вільфрід
МПК: A61K 31/4439, A61K 31/496, A61P 25/00, C07D 401/14
Мітки: заміщені, їхнє, залежних, оксиндолу, похідні, вазопресину, лікування, застосування, захворювань
Формула / Реферат:
1. Сполука формули І, (I) де X1 означає -О-, -О-С(=О)-, -NR11-, -NR11-CH2- або -NR11-C(=O)-; X2 означає простий зв'язок, CO або СН2; X3 означає N або СН; X4 означає N або СН; А означає фенілен або 6-членний гетероарилен з 1 атомом азоту як...
Заміщені похідні піразолілпіразолу та їх застосування як гербіцидів
Номер патенту: 57741
Опубліковано: 15.07.2003
Автори: Хартфіль Уве, Ганцер Міхаель, Бонер Юрген, Франке Хельга
МПК: A01N 43/56, C07D 405/14, C07D 231/52, C07D 409/14, C07D 493/04, A01N 43/90
Мітки: застосування, гербіцидів, піразолілпіразолу, похідні, заміщені
Формула / Реферат:
1. Заміщені піразолілпіразоли загальної формули (І),(I)в якійR1 означає С1-С4-алкіл,R2 означає С1-С4-алкіл, С1-С4-алкілтіогрупу, С1-С4-алкілсульфініл, С1-С4-алкілсульфоніл, С1-С4-алкоксигрупу; С1-С4-алкіл, С1-С4-алкілтіогрупа, С1-С4-алкілсульфоніл або С1-С4-алкоксигрупа, заміщені одним або кількома атомами галогену,R1 та R2 разом утворюють групу -(СH2)m-,R3 означає водень або галоген,R4...
Складні арилалкілові ефіри 4-аміно-6-(заміщений феніл)піколінатів і їх застосування як гербіцидів

Номер патенту: 108922
Опубліковано: 25.06.2015
Автори: Епп Джеффрі Б., Еккельбарджер Джозеф Д., Сіддалл Томас Л., Шмітцер Пол Р., Лоу Крістіан Т., Гюнтенспбергер Катеріне А., Йєркс Карла Н.
МПК: C07D 213/79, A01P 13/00, A01N 43/90
Мітки: феніл)піколінатів, ефіри, 4-аміно-6-(заміщений, арилалкілові, застосування, складні, гербіцидів
Формула / Реферат:
1. Сполука формули IB:, IBдеX являє собою Н або F;Y являє собою галоген, С1-С8-алкіл, С3-С6-циклоалкіл або феніл, заміщений 1-4 замісниками, незалежно вибраними з галогену, С1-С3-алкілу, С3-С6-циклоалкілу, С1-С3-алкокси, С1-С3-галогеналкілу, С1-С3-галогеналкокси, ціано, нітро, NR1R2, або де два суміжні замісники, взяті разом, являють собою...
Заміщені 1-(3-піридиніл)піразол-4-ілоцтові кислоти та їх застосування як гербіцидів і регуляторів росту рослин
Номер патенту: 96314
Опубліковано: 25.10.2011
Автори: Розінгер Крістофер Хью, Хілльс Мартін Джеффрі, Фойхт Дітер, Орт Освальд, Кене Хайнц, Якобі Харальд
МПК: C07D 401/04, C07D 231/12, A01N 43/56, A01P 13/02, A01P 21/00
Мітки: рослин, гербіцидів, кислоти, заміщені, росту, регуляторів, 1-(3-піридиніл)піразол-4-ілоцтові, застосування
Формула / Реферат:
1. Застосування заміщених 1-(3-піридиніл)піразол-4-ілоцтових кислот формули (І) або їх солей, (I)в якійR1 означає водень або здатний до гідролізу залишок,R2 означає водень, галоген або (С1-С6)-алкіл, який є незаміщеним або заміщеним одним або кількома залишками з групи, що включає галоген, (С1-С4)-алкокси, (С1-С4)-алкілтіо та...
Заміщені піколінові кислоти і піримідин-4-карбонові кислоти, спосіб їх одержання, а також їх застосування як гербіцидів і регуляторів росту рослин
Номер патенту: 111084
Опубліковано: 25.03.2016
Автори: Розінгер Крістофер Хью, Хайнеманн Інес, Гатцвайлер Ельмар, Брюн'єс Марко, Хойзер-Ханн Ізольде, Дьоллєр Уве, Хоффман Міхаель Герхард, Дітріх Ханс-Йорг
МПК: C07D 403/04, C07D 409/04, C07D 405/04, C07D 401/04, C07D 417/04, A01N 43/40, C07D 413/04
Мітки: росту, гербіцидів, застосування, рослин, піколінові, регуляторів, також, кислоти, спосіб, заміщені, одержання, піримідин-4-карбонові
Формула / Реферат:
1. Сполуки формули (І), їх N-оксиди або їх солі, (І)деА означає залишок групи, що складається з А1-А20: , ,
Попередній патент: Спосіб неруйнівного контролю стільникових панелей
Наступний патент: Пептид mphosph1 та вакцина, що його містить
Випадковий патент: Кліщовий захват