Система управління швидкістю літака
Номер патенту: 117707
Опубліковано: 10.07.2017
Автори: Смирнова Людмила Іванівна, Нгуен Динь Донг, Субота Анатолій Максимович
Формула / Реферат
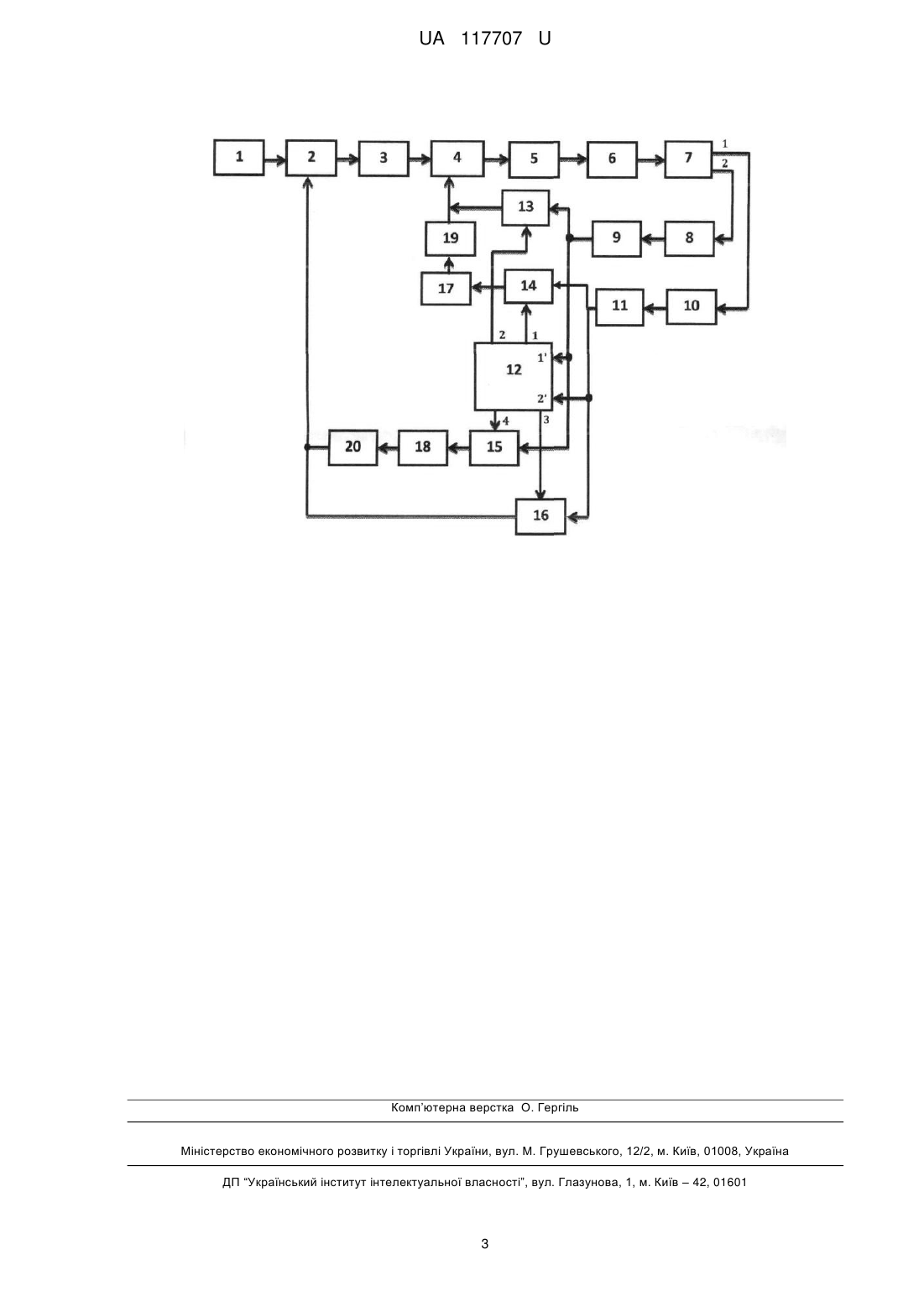
Система управління швидкістю літака, що містить у своєму складі послідовно з'єднані задатчик швидкості, перший суматор, підсилювач датчика швидкості, другий суматор, інтегратор, авіадвигун, акселерометр, блок динаміки літака, яка відрізняється тим, що другий вхід першого суматора через послідовно з'єднані четвертий фільтр і інтегратор з'єднані з входом третього ключа, перший вхід якого з'єднаний з четвертим виходом блока діагностики, а другий вхід з'єднаний з виходом першого фільтра, вхід якого через акселерометр з'єднаний з другим виходом блока динаміки літака, другий вхід першого суматора також з'єднаний з виходом четвертого ключа, перший вхід якого з'єднаний з третім виходом блока діагностики, а другий вхід через послідовно з'єднані другий фільтр і датчик повітряної швидкості з'єднаний з першим виходом блока динаміки літака, виходи першого і другого фільтрів додатково з'єднані відповідно з першим і другим входами блока діагностики, перший вхід другого ключа з'єднаний з першим виходом блока діагностики, другий вхід якого з'єднаний з виходом другого фільтра, а вихід через послідовно з'єднані блок диференціювання і третій фільтр з'єднаний з другим входом другого суматора, який додатково з'єднаний з виходом першого ключа, перший вхід якого з'єднаний з другим входом блока діагностики, а другий вхід з'єднаний з виходом першого фільтра.
Текст
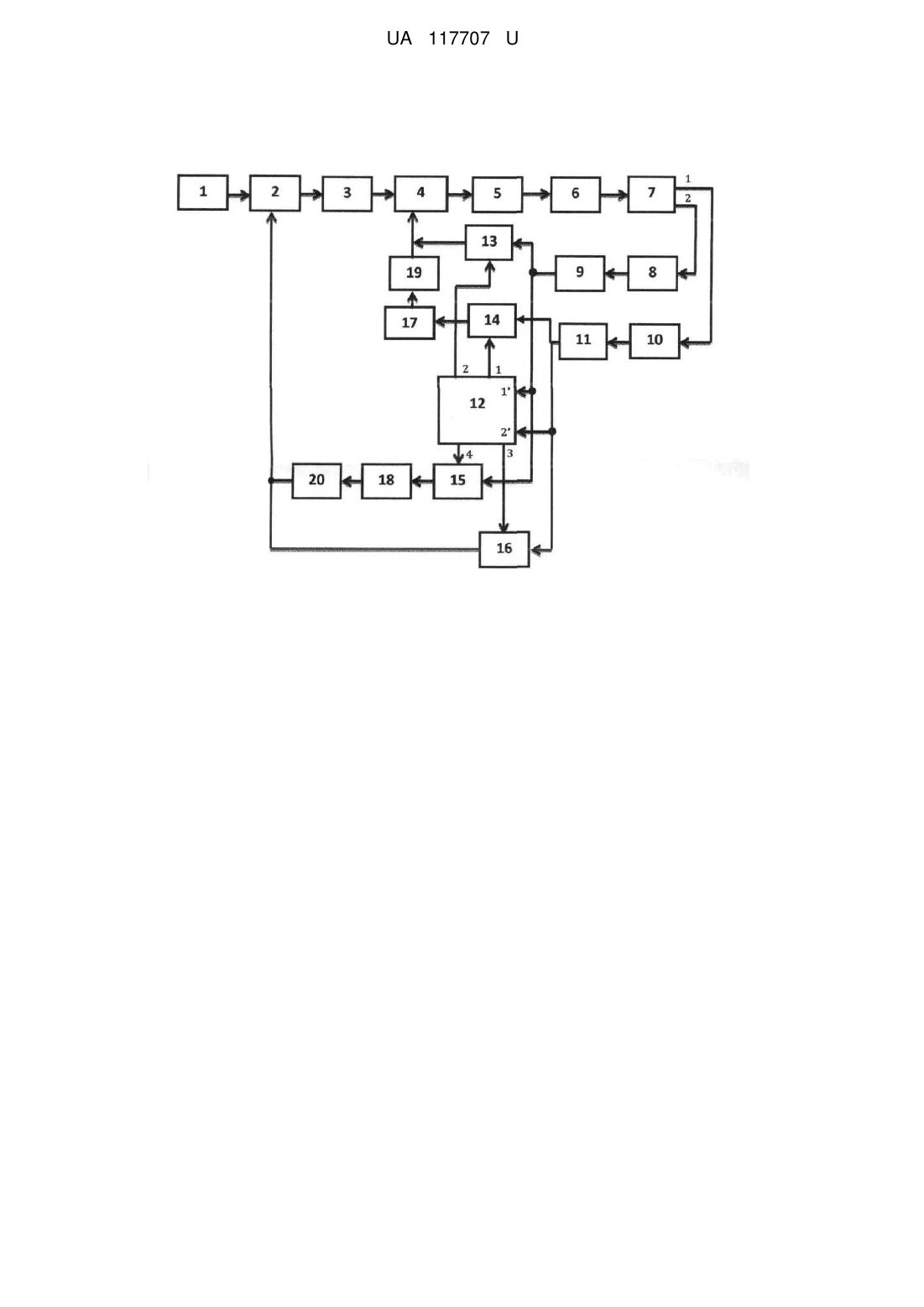
Реферат: Система управління швидкістю літака містить у своєму складі послідовно з'єднані задатчик швидкості, перший суматор, підсилювач датчика швидкості, другий суматор, інтегратор, авіадвигун, акселерометр та блок динаміки літака. Містить перший, другий, третій, четвертий фільтри, перший, другий, третій ключі, блок діагностики та блок диференціювання. UA 117707 U (54) СИСТЕМА УПРАВЛІННЯ ШВИДКІСТЮ ЛІТАКА UA 117707 U UA 117707 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до авіаційної техніки, а саме до систем стабілізації швидкості руху літака. Відома система астатичного регулювання швидкості літака. (Боднер В.А. Системы управления летательными аппаратами.: "Машиностроение", 1973, 506 с.; див. стор. 155, рис. 4.14), що у своему складі містить задатчик швидкості, вихід якого з'єднаний з першим входом першого суматора, вихід якого через підсилювач датчика швидкості з'єднаний з першим входом другого суматора, вихід якого через інтегратор з'єднаний з входом авіадвигуна, вихід якого з'єднаний з входом блока динаміки літака, вихід якого з'єднаний з другим входом першого суматора і через акселерометр з'єднаний з другим входом другого суматора. Дана система взята як найближчий аналог. Недоліками цієї системи є недостатня надійність і точність стабілізації швидкості літака при наявності завад у вихідних сигналах датчика повітряної швидкості і акселерометра. Задачею корисної моделі є підвищення надійності і точності стабілізації швидкості літака при наявності завад у вихідних сигналах датчика повітряної швидкості і акселератора. Поставлена задача вирішується тим, що в системі управління швидкістю літака, що має у своєму складі послідовно з'єднані задатчик швидкості, перший суматор, підсилювач датчика швидкості, другий суматор, інтегратор, авіадвигун, акселерометр, блок динаміки літака, згідно з корисною моделлю, другий вхід першого суматора через послідовно з'єднані четвертий фільтр і інтегратор з'єднані з входом третього ключа, перший вхід якого з'єднаний з четвертим виходом блока діагностики, а другий вхід з'єднаний з виходом першого фільтра, вхід якого через акселерометр з'єднаний з другим виходом блока динаміки літака, другий вхід першого суматора також з'єднаний з виходом четвертого ключа, перший вхід якого з'єднаний з третім виходом блока діагностики, а другий вхід через послідовно з'єднані другий фільтр і датчик повітряної швидкості з'єднаний з першим виходом блока динаміки літака, виходи першого і другого фільтрів додатково з'єднані відповідно з першим і другим входами блока діагностики, перший вхід другого ключа з'єднаний з першим виходом блока діагностики, другий вхід якого з'єднаний з виходом другого фільтра, а вихід через послідовно з'єднані блок диференціювання і третій фільтр з'єднаний з другим входом другого суматора, який додатково з'єднаний з виходом першого ключа, перший вхід якого з'єднаний з другим входом блока діагностики, а другий вхід з'єднаний з виходом першого фільтра. Суть корисної моделі пояснюється кресленням, де зображено функціональну схему запропонованої системи управління швидкістю літака. Система управління швидкістю літака містить: задатчик швидкості 1; вихід якого з'єднаний з першим входом першого суматора 2. Другий вхід першого суматора 2, з'єднаний з виходом четвертого фільтра 20 і входом четвертого ключа 16. Вхід четвертого фільтра 20 через інтегратор 18 з'єднаний з виходом третього ключа 15, перший вхід якого з'єднаний з четвертим блоком діагностики 12, а другий вхід з'єднаний з виходом першого фільтра 9, вхід якого через акселерометр 8 з'єднаний з другим виходом блока динаміки літака 7. Перший вхід четвертого ключа 16 з'єднаний з третім виходом блока діагностики 12, а другий вхід з'єднаний з виходом другого фільтра 11, вхід якого через датчик повітряної швидкості 10 з'єднаний з першим виходом блока динаміки літака 7. Вихід першого фільтра 9 додатково з'єднаний з першим входом блока діагностики 12 і другим входом першого ключа 13, перший вхід якого з'єднаний з другим виходом блока діагностики 12. Вихід першого ключа 13 з'єднаний з другим входом другого суматора 4, який додатково через послідовно з'єднані третій фільтр 19 і блок диференціювання 17 з'єднаний з виходом другого ключа 14. Перший вхід другого ключа з'єднаний з першим виходом блока діагностики 12, а його другий вхід з'єднаний з виходом другого фільтра 11. Перший вхід другого суматора 4 з'єднаний з виходом підсилювача датчика швидкості 3, а його вихід через послідовно з'єднані інтегратор 5, авіадвигун 6 з'єднаний з входом блока динаміки літака 7. Система управління швидкістю літака працює наступним чином. Стабілізація швидкості літака відповідає закону p K V K Vdt (1) де K і K - коефіцієнти пропорційності; V і V - відповідно швидкість і лінійне прискорення літака; 55 p - кут відхилення сектора газу. В реальних умовах вихідні сигнали акселерометра 8 і датчика повітряної швидкості 10 схильні до завад, що відображається на точності витримування заданої задатчиком швидкості 1 літака V . Тому вихідні сигнали акселерометра 8 і датчика повітряної швидкості 10 підлягають фільтрації за допомогою відповідних фільтрів 9 і 11, що значно відображається на точності 1 UA 117707 U роботи системи. При нормальному функціонуванні акселерометра 8 і датчика повітряної швидкості 10 блок діагностики 12 на виходах 2 і 3 виробляє сигнали відкриття четвертого ключа 16 і першого ключа 13. При цьому на другі входи першого 2 і другого суматора 4 з виходу відповідних фільтрів (другого 11 і першого 9) поступають сигнали пропорціональні швидкості V 5 10 15 20 25 і прискоренню V , що необхідно для формування закону управління сектором газу p . При відмові, наприклад, акселерометра 8, сигнал, пропорційний V формується за рахунок використання вихідного сигналу датчика повітряної швидкості 10 шляхом його диференціювання в блоці диференціювання 17. При цьому блок діагностики 12 виробляє сигнали управління на виході 1, що забезпечує відкриття другого ключа 14 і проходження сигналу, що виробляється на виході другого фільтра 11, який пропорціональний вихідному сигналу датчика повітряної швидкості 10. Таким чином, відмова функціонування акселерометра 8 не приводить до невиконання умов закону (1). Аналогічно, при відмові датчика повітряної швидкості 10, сигнал, пропорційний швидкості V , формується за рахунок використання вихідного сигналу акселерометра 8. При цьому блок діагностики після установлення відмови датчика повітряної швидкості 10, виробляє сигнали управління на виході 4, що забезпечує проходження сигналу V з виходу першого фільтра 9 через відкритий третій ключ, інтегратор 18, фільтр 20 до другого входу першого суматора 2. Це знову забезпечує виконання закону (1). Завдяки цьому для реалізації заданого закону управління відмова датчика повітряної швидкості або акселерометра не позначиться на якості функціонування системи управління швидкістю літака, а наявність фільтрів значно підвищить точність вихідних параметрів датчиків ( V і V , де V - швидкість, V - прискорення літака). Таким чином, корисна модель повністю відповідає поставленим задачам - підвищення точності і надійності функціонування системи управління швидкості літака. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Система управління швидкістю літака, що містить у своєму складі послідовно з'єднані задатчик швидкості, перший суматор, підсилювач датчика швидкості, другий суматор, інтегратор, авіадвигун, акселерометр, блок динаміки літака, яка відрізняється тим, що другий вхід першого суматора через послідовно з'єднані четвертий фільтр і інтегратор з'єднані з входом третього ключа, перший вхід якого з'єднаний з четвертим виходом блока діагностики, а другий вхід з'єднаний з виходом першого фільтра, вхід якого через акселерометр з'єднаний з другим виходом блока динаміки літака, другий вхід першого суматора також з'єднаний з виходом четвертого ключа, перший вхід якого з'єднаний з третім виходом блока діагностики, а другий вхід через послідовно з'єднані другий фільтр і датчик повітряної швидкості з'єднаний з першим виходом блока динаміки літака, виходи першого і другого фільтрів додатково з'єднані відповідно з першим і другим входами блока діагностики, перший вхід другого ключа з'єднаний з першим виходом блока діагностики, другий вхід якого з'єднаний з виходом другого фільтра, а вихід через послідовно з'єднані блок диференціювання і третій фільтр з'єднаний з другим входом другого суматора, який додатково з'єднаний з виходом першого ключа, перший вхід якого з'єднаний з другим входом блока діагностики, а другий вхід з'єднаний з виходом першого фільтра. 2 UA 117707 U Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 13/00
Мітки: швидкістю, система, управління, літака
Код посилання
<a href="https://ua.patents.su/5-117707-sistema-upravlinnya-shvidkistyu-litaka.html" target="_blank" rel="follow" title="База патентів України">Система управління швидкістю літака</a>
Система стабілізації швидкості літака
Номер патенту: 106163
Опубліковано: 25.04.2016
Автори: Барашева Світлана Іванівна, Симонов Володимир Федорович
МПК: B64C 19/00, G01S 13/02, G01P 3/44
Мітки: швидкості, система, літака, стабілізації
Формула / Реферат:
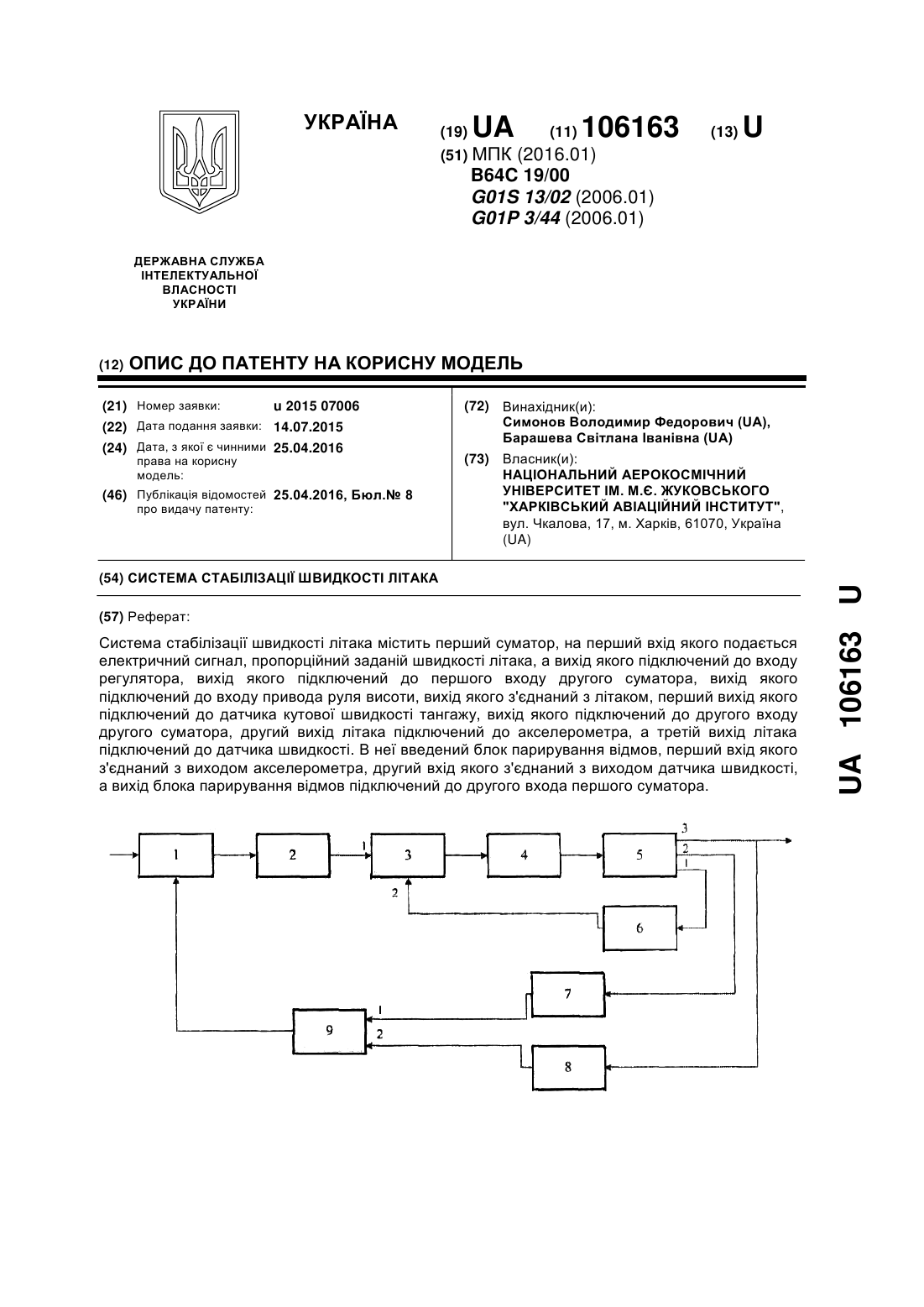
Система стабілізації швидкості літака, що містить перший суматор, на перший вхід якого подається електричний сигнал, пропорційний заданій швидкості літака, а вихід якого підключений до входу регулятора, вихід якого підключений до першого входу другого суматора, вихід якого підключений до входу привода руля висоти, вихід якого з'єднаний з літаком, перший вихід якого підключений до датчика кутової швидкості тангажу, вихід якого підключений до...
Адаптивна система управління швидкістю обертання турбіни
Номер патенту: 78888
Опубліковано: 10.04.2013
Автори: Гусєва Альона Олегівна, Симонов Володимир Федорович
МПК: F03B 15/00
Мітки: швидкістю, обертання, турбіни, адаптивна, управління, система
Формула / Реферат:
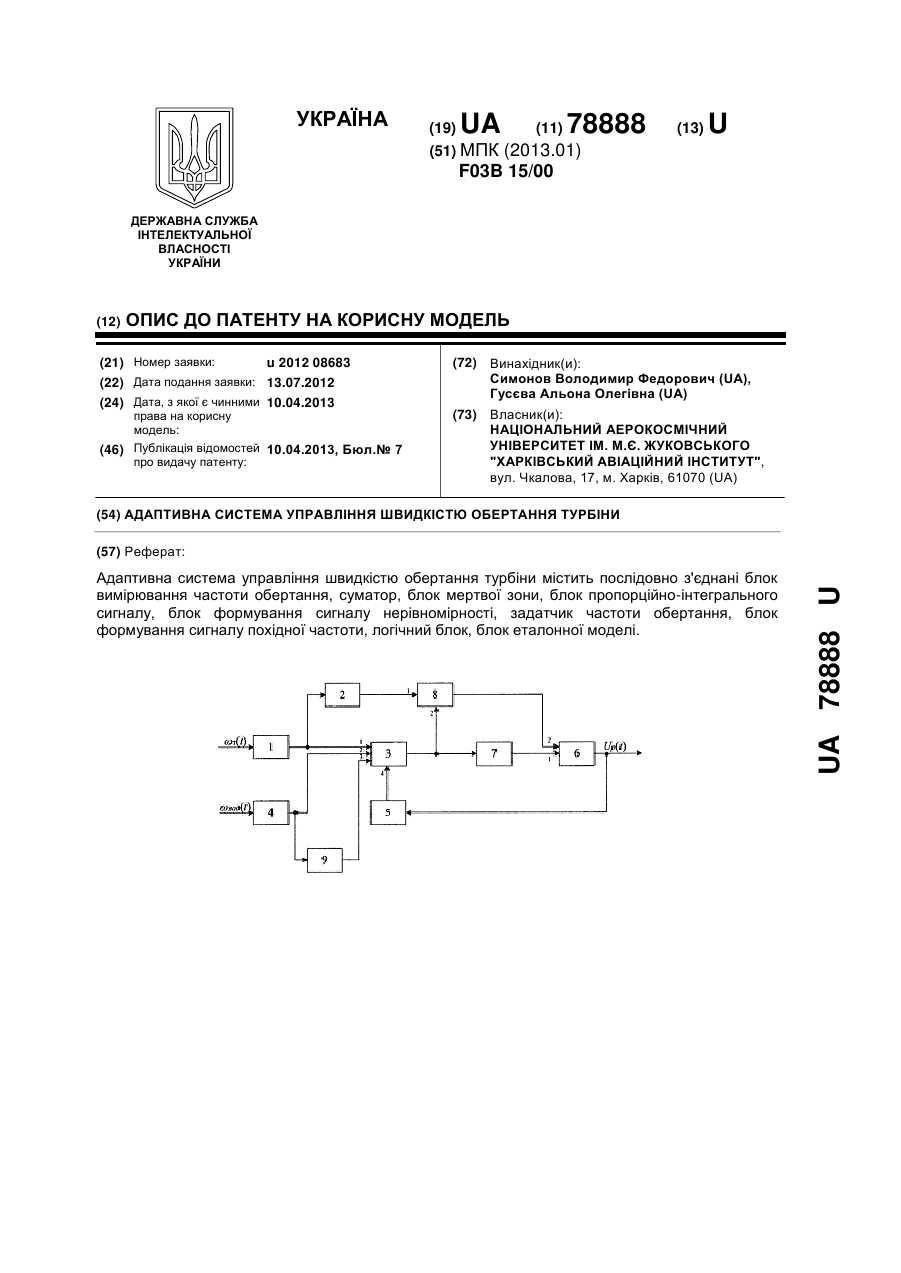
Адаптивна система управління швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, блок формування сигналу нерівномірності, вихід якого з'єднаний з четвертим входом суматора, а також задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом...
Адаптивна система управління швидкістю обертання радіолокаційної антени
Номер патенту: 103634
Опубліковано: 25.12.2015
Автори: Білоконська Юлія Валентинівна, Симонов Володимир Федорович
МПК: H01Q 3/00, G01S 13/02
Мітки: радіолокаційної, адаптивна, швидкістю, управління, система, антени, обертання
Формула / Реферат:
Адаптивна система управління швидкістю обертання радіолокаційної антени, що містить задатчик кута повороту антени, підключений до входу, механічно пов'язаного з виконавчим механізмом датчика кута повороту антени, вихід якого через фазовий детектор підключений до першого входу порогового блока, другий вхід якого з'єднаний з виходом задатчика величини сектора огляду, а вихід з'єднаний з першим входом суматора, другий вхід якого підключений до...
Відмовостійка система керування швидкістю обертання турбіни

Номер патенту: 76051
Опубліковано: 25.12.2012
Автори: Гармаш Денис Вікторович, Симонов Володимир Федорович
МПК: F03B 15/00
Мітки: швидкістю, обертання, керування, відмовостійка, система, турбіни
Формула / Реферат:
Відмовостійка система керування швидкістю обертання турбіни, що містить послідовно з'єднані блок вимірювання частоти обертання, суматор, блок мертвої зони, блок пропорційно-інтегрального сигналу, перший блок формування сигналу нерівномірності та задатчик частоти обертання, вихід якого з'єднаний з другим входом суматора, блок формування сигналу похідної частоти, вхід якого з'єднаний з виходом блока вимірювання частоти обертання, а вихід...
Система управління кутом тангажа літального апарата
Номер патенту: 98659
Опубліковано: 12.05.2015
Автори: Симонов Володимир Федорович, Карпова Тетяна Володимирівна
МПК: G05D 1/08, B64C 13/18
Мітки: літального, кутом, апарата, управління, тангажа, система
Формула / Реферат:
Система управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика...
Попередній патент: Система управління зенітною ракетою
Наступний патент: Спосіб лікування гонартрозу
Випадковий патент: Пристрій для транспортування і очистки коренебульбоплодів