Регульований механізм приводу ноги крокуючих машин
Номер патенту: 118166
Опубліковано: 25.07.2017
Автори: Амбарцумянц Роберт Вачаганович, Кара Олена Дмитрівна

Формула / Реферат
Регульований механізм приводу ноги крокуючих машин, що містить корпус, ведучий вал, кривошип, шатун, повзун у вигляді циліндричного тіла, додатковий шатун (крокуюча нога), вал, з поздовжньою віссю, паралельною поздовжній осі ведучого вала і рухомо установлений у корпусі П-подібний кронштейн жорстко з'єднаний з валом, який відрізняється тим, що у корпусі жорстко установлені два циліндричних пальця з поздовжніми осями, паралельними осі ведучого вала, на циліндричних пальцях відповідно рухомо установлені два циліндричних стрижня з різьбою і з поздовжніми осями, перпендикулярними поздовжнім осям циліндричних пальців, на циліндричні стрижні посаджені циліндричні пружини тиску, кожна з яких одним торцем упирається на регулюючу гайку, яка угвинчена на відповідний стрижень, а другим торцем циліндричні пружини тиску упираються на циліндричні повзуни, які рухомо установлені на відповідні стрижні, при цьому циліндричні повзуни шарнірно сполучені рукавами важеля, який в свою чергу жорстко установлений на валу.
Текст
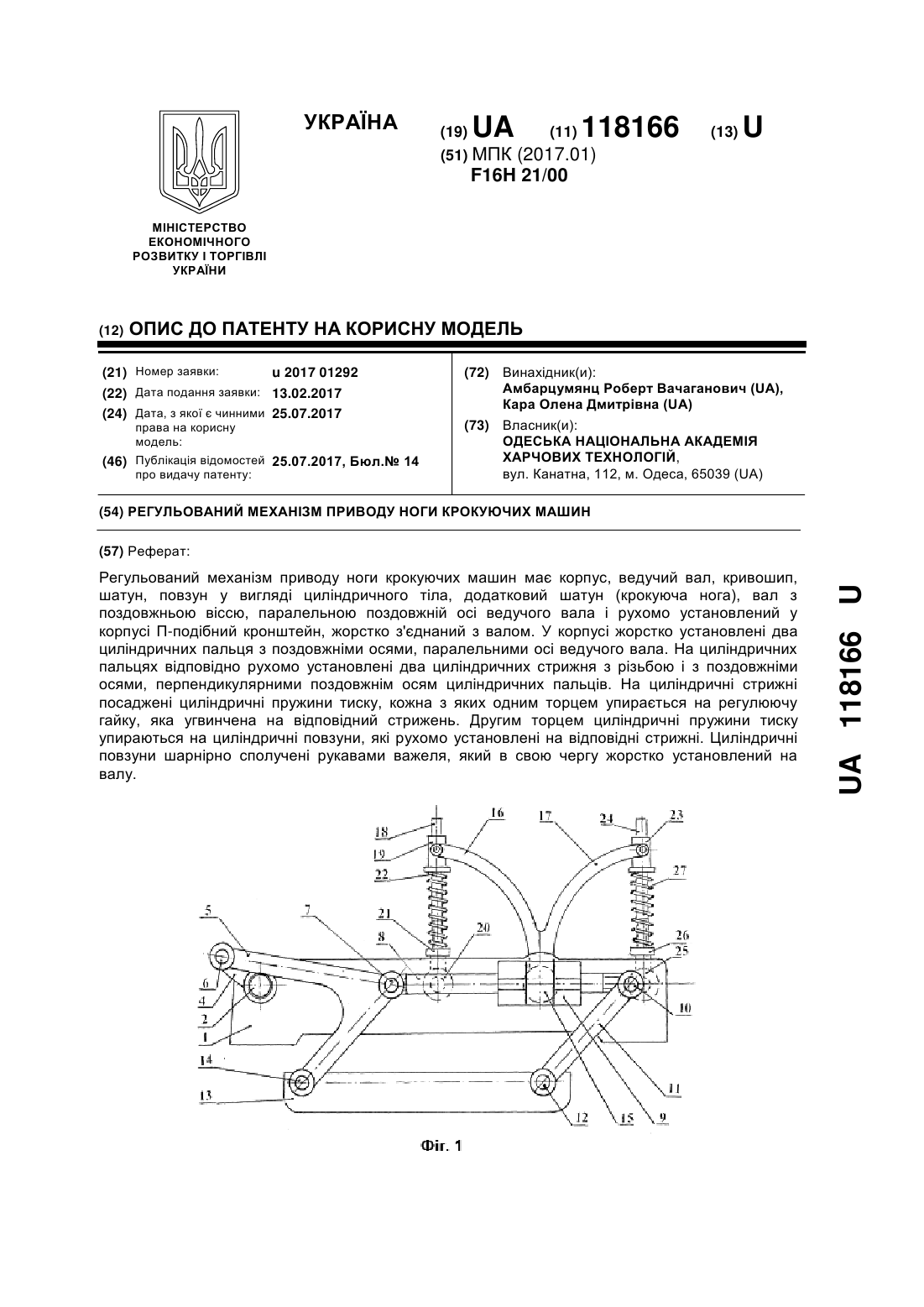
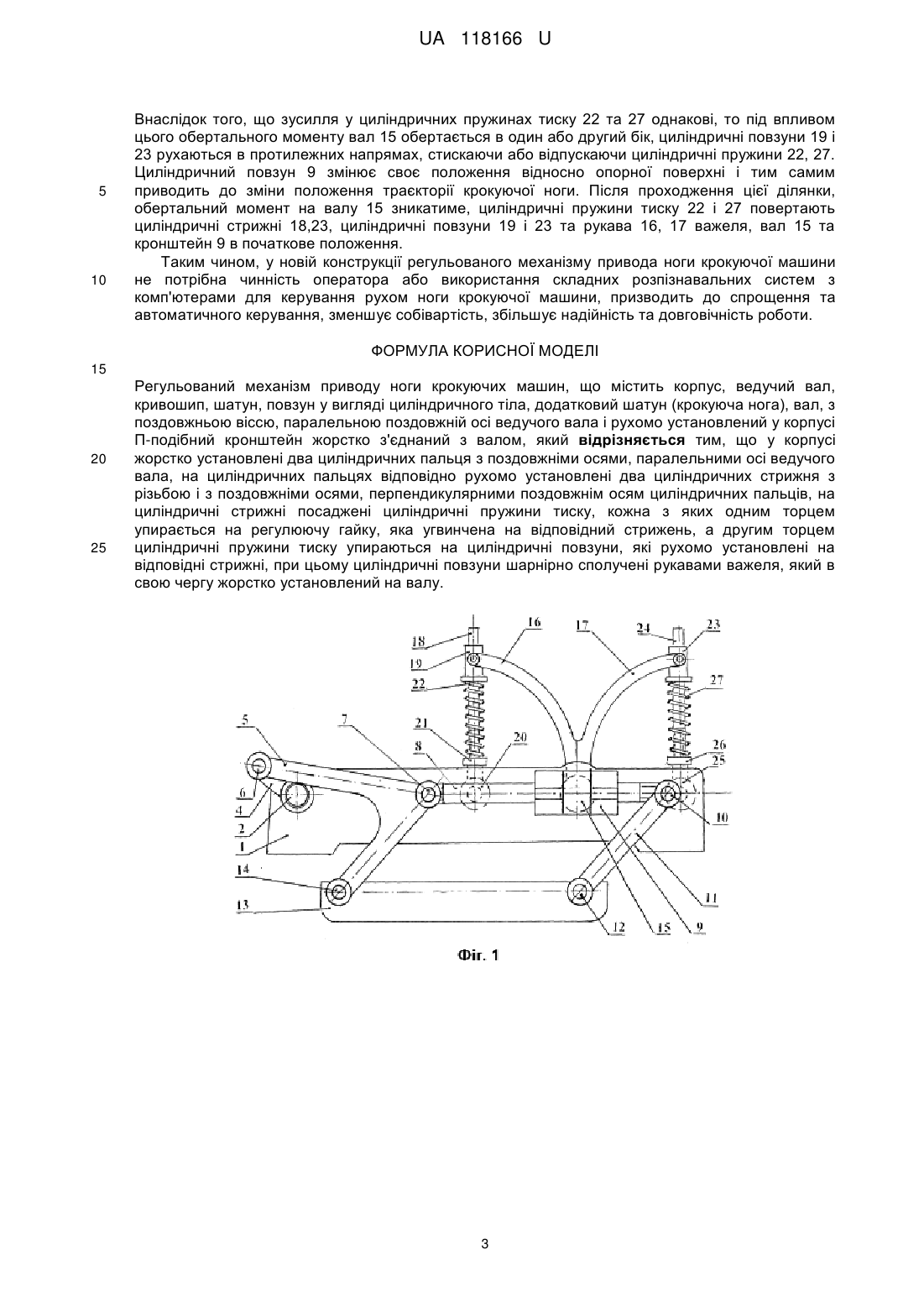
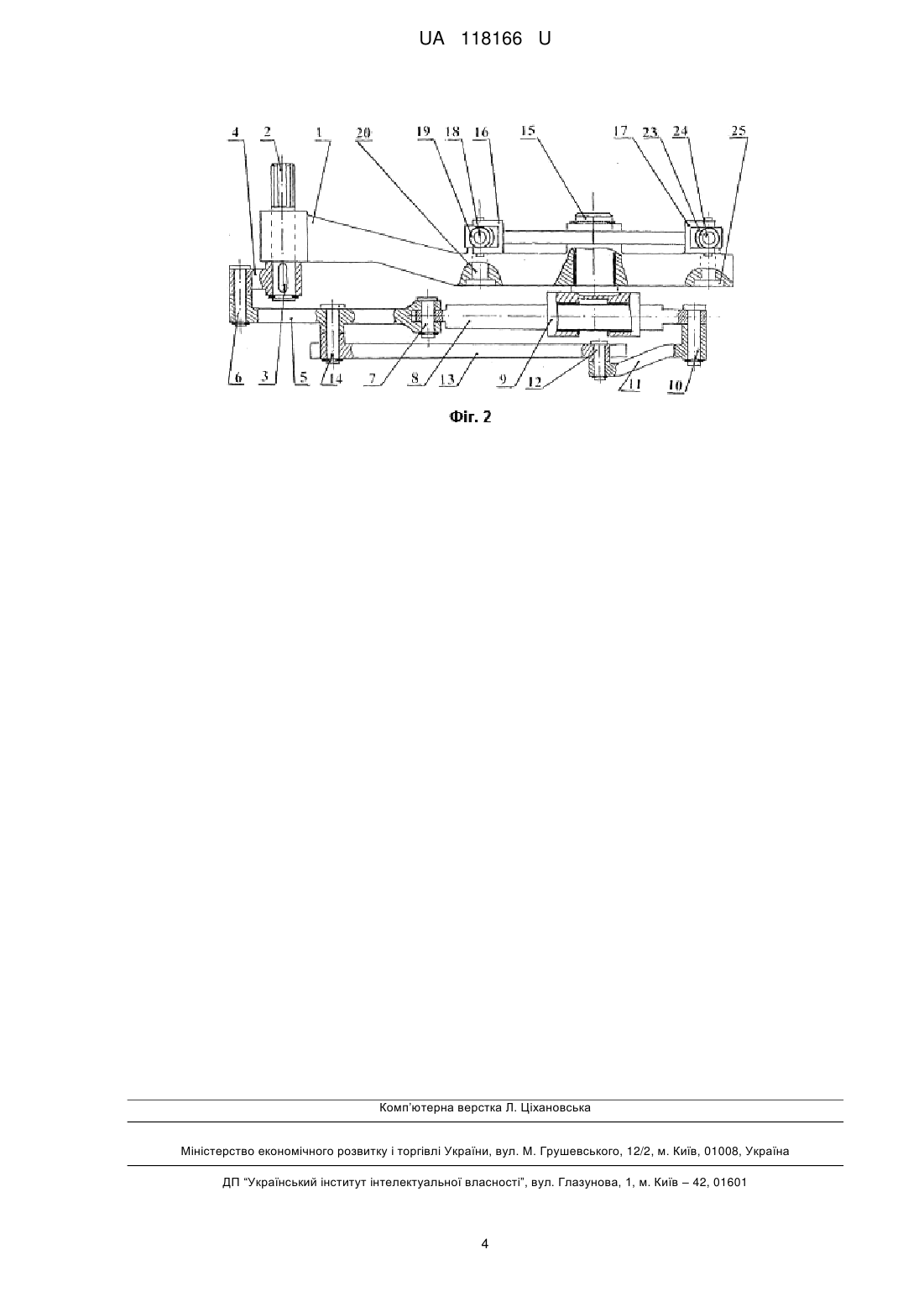
Реферат: UA 118166 U UA 118166 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі машинобудування, а саме до механізмів поступального переміщення об'єкта по шатунних кривих, які використовуються в крокуючих машинах, в захватних пристроях роботів та маніпуляторів, в пристосуваннях для металоріжучих верстатів, машин ливарного виробництва, в машинах і автоматах харчової, легкої промисловості та ін. Відомі важільні і зубчасто-важільні механізми, в яких об'єкт, жорстко сполучений з одним із шатунів механізму, відтворює поступальне переміщення по складній траєкторії (див., наприклад, Амбарцумянц Р.В. Зубчато-рычажный механизм для воспроизведения плоскопараллельного движения объекта. Сб. Теория механизмов и машин. - Харьков, 1978. - № 26.). Проте, у цих механізмах поступальне переміщення об'єкта здійснюється лише на деякій ділянці кута повороту вихідної ланки. Крім цього, у цих переміщеннях об'єкта поступально по шатунній кривій абсолютно точно не можливо не тільки за повний оберт вхідної ланки, але і на деякій ділянці його кута повороту. Відома конструкція шестиланкового важільного механізму (див., наприклад, патент України на корисну модель № 32393. Бюл. № 9, 2006 p.), яка забезпечує переміщення об'єкта по шатунній кривій за повний оберт ведучої ланки. Проте, якщо ці механізми використовуються як приводи ноги крокуючих машин, то як і у першому прикладі, так і у другому, траєкторія крокуючої ноги не змінює свого положення, відносно опорної поверхні. Це дуже важко при русі машини по нерівній поверхні, нахил в одну або другу сторону. Найближчим технічним рішенням до корисної моделі, що заявляється, є механізм приводу ноги крокуючих машин (див. патент України на корисну модель № 98978. Бюл. № 9, 12.05. 2015 р.). Механізм приводу ноги крокуючих машин містить корпус, ведучий вал, кривошип, шатун, повзун, у вигляді циліндричного тіла, додатковий шатун. Повзун установлений на П-подібний кронштейн, жорстко закріплений на одному кінці вала, який рухомо установлений в корпусі, а на другому кінці вала жорстко закріплене черв'ячне колесо, яке зачеплене з черв'яком, установленим рухомо в корпусі і сполучений з керуючим електродвигуном через муфту. Механізм приводу ноги крокуючих машин працює в двох режимах: режим роботи, режим регулювання. Режим роботи. Обертальний рух ведучого вала через шатун передається циліндричному повзуну. Від шатуна і циліндричного повзуна рух передається додатковому шатуну, який і є крокуючою ногою. Режим регулювання. Режим регулювання починається, коли виникають на дорозі перешкоди (підйом, ухил або нерівності). Від оператора, який керує машиною, імпульс регулювання передається до регулюючого електродвигуна. Обертальний рух електродвигуна через черв'ячну передачу передається валу, від нього П-подібному кронштейну, що приводить до зміни положення траєкторії поступального переміщення крокуючої ноги відносно опорної поверхні. Конструкція даного механізму привода ноги крокуючих машин вибрана прототипом. Прототип і корисна модель, що заявляється, мають такі спільні ознаки: - корпус; - ведучий вал; - кривошип; - шатун; - повзун у вигляді циліндричного тіла; - додатковий шатун (крокуюча нога); - вал, рухомо встановлений у корпусі; - П-подібний кронштейн, жорстко закріплений з валом. Конструкція описаного механізму приводу ноги крокуючих машин має ряд недоліків, які з'являються під час регулювання. 1. Оператор не може достовірно визначити кут нахилу або підйому для визначення кількості імпульсів до керуючого електродвигуна, що може викликати великі похибки положення ноги відповідно опорної поверхні. Можна стверджувати, що оператор неспроможний своєчасно керувати роботою керуючого електродвигуна. 2. Для збільшення точності керування рухом крокуючої ноги відносно опорної поверхні треба використовувати систему комп'ютерів для розпізнавання своєчасних перешкод на дорозі та визначення кількості імпульсів для керування роботи черв'ячної передачі. Використання комп'ютерної системи розпізнавання образів, для управління керуючим електродвигуном, у декілька разів збільшує собівартість механізму привода ноги крокуючих машин і зменшує надійність та довговічність роботи. В основу корисної моделі поставлено задачу створити конструкцію механізму привода крокуючих машин для автоматичного регулювання положення траєкторії ноги відносно опорної 1 UA 118166 U 5 10 15 20 25 30 35 40 45 50 55 60 поверхні без яких-небудь додаткових передач керуючих електродвигунів та комп'ютерних систем розпізнавання образів. Поставлена задача вирішується тим, що в конструкції регульованого механізму привода ноги крокуючих машин, який містить корпус, ведучий вал, кривошип, шатун, повзун у вигляді циліндричного тіла, додатковий шатун (крокуюча нога), вал, рухомо установлений у корпусі з поздовжньою віссю, паралельною поздовжній осі ведучого вала, П-подібний кронштейн жорстко з'єднаний з валом, згідно з корисною моделлю, у корпусі жорстко установлені два циліндричних пальця з поздовжніми осями, паралельними осі вала, на пальцях відповідно рухомо установлені два циліндричних стрижня з різьбою і з поздовжніми осями, перпендикулярними поздовжнім осям циліндричних пальців, на циліндричні стрижні посаджені циліндричні пружини тиску, кожна з яких одним торцем упирається на регулюючу гайку, яка угвинчена на відповідний стрижень, а другим торцем циліндричні пружини тиску упираються на циліндричні повзуни, які рухомо установлені на відповідні стрижні, при цьому циліндричні повзуни шарнірно сполучені рукавами важеля, який в свою чергу жорстко установлений на валу. Регульований механізм приводу ноги крокуючих машин зображений на кресленні, де: фіг. 1 - фронтальний вигляд; фіг. 2 - горизонтальній вигляд з місцевими перерізами. Регульований механізм приводу ноги крокуючих машин складається з корпусу 1, в якому установлено ведучий вал 2. На ведучому валу 2 за допомогою шпонки 3 установлений кривошип 4. Кривошип 4 шарнірно сполучений з шатуном 5 через циліндричний палець 6. Шатун 5 у свою чергу за допомогою циліндричного пальця 7 шарнірно з'єднаний одним кінцем з циліндричним повзуном 8. Циліндричний повзун 8 рухомо встановлений у П-подібний кронштейн 9. Другим кінцем циліндричний повзун 8, через циліндричний палець 10, шарнірно з'єднаний з важелем 11. Важіль 11 за допомогою циліндричного пальця 12 шарнірно сполучений з додатковим шатуном 13. Додатковий шатун 13 другим кінцем, через циліндричний палець 14, шарнірно сполучений з шатуном 5. П-подібний кронштейн 9 у свою чергу жорстко з'єднаний з валом 15. Вал 15 з поздовжньою віссю, паралельною поздовжній осі ведучого вала 2, рухомо установлений у корпусі 1. З протилежного боку П-подібного кронштейна 9 на валу 15 жорстко закріплено важіль з рукавами 16, 17. Рукав 16 шарнірно сполучений з циліндричним повзуном 19, який рухомо встановлений на циліндричному стрижні 18. Циліндричний стрижень 18 рухомо встановлений на циліндричному пальці 20, який жорстко встановлений у корпусі 1 таким чином, що його поздовжня вісь паралельна поздовжній осі ведучого вала 2. У циліндричному стрижні 18 нарізана різьба та угвинчена гайка 21. На гайку 21 упирається одним торцем циліндрична пружина тиску 22, а другим торцем - на циліндричний повзун 19. В сою чергу рукава 17 шарнірно сполучений з циліндричним повзуном 23, який рухомо встановлений на циліндричний стрижень 24. Циліндричний стрижень 24 шарнірно сполучений з циліндричним пальцем 25. Циліндричний палець 25 з поздовжньою віссю, паралельній поздовжній осі вала 15, жорстко встановлений у корпусі 1. На циліндричному стрижні 24 угвинчена гайка 26. На гайку 26 одним торцем упирається циліндрична пружина тиску 27, яка другим торцем упирається на торець циліндричного повзуна 23. Регульований механізм приводу ноги крокуючої машини працює в двох режимах: - режим роботи; - режим автоматичного регулювання. 1. Режим роботи. Обертальний рух від зовнішнього джерела (на кресленні не зображено) передається ведучому валу 2 і від нього через шпонку 3 обертання передається кривошипу 4. Від кривошипа 4 через шатун 5 рух передається циліндричному повзуну 8. Від циліндричного повзуна 8 через важіль 11 і від шатуна 5 через циліндричний палець 14, рух передається додатковому шатуну 13. П-подібний кронштейн 9, вал 15, циліндричні стрижні 18, 24 нерухомі. Центральна вісь циліндричного пальця 12 рухається за такою ж кривою, що і поздовжня вісь циліндричного пальця 14, оскільки прямі лінії, з'єднуючі геометричні центри циліндричних пальців 7, 14, 12 та 10, утворюють контур шарнірного паралелограма. Отже усі точки додаткового шатуна 13, який є крокуючою ногою, рухаються по траєкторії, ідентичній траєкторії циліндричних пальців 14 і 12. 2. Режим автоматичного регулювання. До початку роботи за допомогою гайок 21 і 26 створюється початкове зусилля у циліндричних пружинах тиску 22 і 27, а також створюється динамічно зрівноважений стан системи П-подібного кронштейна 9, вала 15, циліндричних стрижнів 18, 24. Якщо горизонтальна дорога переходить на підйом або ухил, або перешкоди невеликої височини, тоді додатковий шатун 13 частиною наступатиме на перешкоду. Через те, щододатковий шатун 13 рухається поступально, то за рахунок ваги корпуса 1 виникає обертальний момент відносно осі вала 15. 2 UA 118166 U 5 10 Внаслідок того, що зусилля у циліндричних пружинах тиску 22 та 27 однакові, то під впливом цього обертального моменту вал 15 обертається в один або другий бік, циліндричні повзуни 19 і 23 рухаються в протилежних напрямах, стискаючи або відпускаючи циліндричні пружини 22, 27. Циліндричний повзун 9 змінює своє положення відносно опорної поверхні і тим самим приводить до зміни положення траєкторії крокуючої ноги. Після проходження цієї ділянки, обертальний момент на валу 15 зникатиме, циліндричні пружини тиску 22 і 27 повертають циліндричні стрижні 18,23, циліндричні повзуни 19 і 23 та рукава 16, 17 важеля, вал 15 та кронштейн 9 в початкове положення. Таким чином, у новій конструкції регульованого механізму привода ноги крокуючої машини не потрібна чинність оператора або використання складних розпізнавальних систем з комп'ютерами для керування рухом ноги крокуючої машини, призводить до спрощення та автоматичного керування, зменшує собівартість, збільшує надійність та довговічність роботи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Регульований механізм приводу ноги крокуючих машин, що містить корпус, ведучий вал, кривошип, шатун, повзун у вигляді циліндричного тіла, додатковий шатун (крокуюча нога), вал, з поздовжньою віссю, паралельною поздовжній осі ведучого вала і рухомо установлений у корпусі П-подібний кронштейн жорстко з'єднаний з валом, який відрізняється тим, що у корпусі жорстко установлені два циліндричних пальця з поздовжніми осями, паралельними осі ведучого вала, на циліндричних пальцях відповідно рухомо установлені два циліндричних стрижня з різьбою і з поздовжніми осями, перпендикулярними поздовжнім осям циліндричних пальців, на циліндричні стрижні посаджені циліндричні пружини тиску, кожна з яких одним торцем упирається на регулюючу гайку, яка угвинчена на відповідний стрижень, а другим торцем циліндричні пружини тиску упираються на циліндричні повзуни, які рухомо установлені на відповідні стрижні, при цьому циліндричні повзуни шарнірно сполучені рукавами важеля, який в свою чергу жорстко установлений на валу. 3 UA 118166 U Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюAmbartsumiants Robert Vachahanovych
Автори російськоюАмбарцумянц Роберт Вачаганович
МПК / Мітки
МПК: F16H 21/00
Мітки: регульованій, механізм, крокуючих, приводу, ноги, машин
Код посилання
<a href="https://ua.patents.su/6-118166-regulovanijj-mekhanizm-privodu-nogi-krokuyuchikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Регульований механізм приводу ноги крокуючих машин</a>
Механізм приводу ноги крокуючих машин
Номер патенту: 98978
Опубліковано: 12.05.2015
Автори: Амбарцумянц Роберт Вачаганович, Арабаджи Олена Дмитрівна
МПК: F16H 21/00
Мітки: крокуючих, ноги, приводу, машин, механізм
Формула / Реферат:
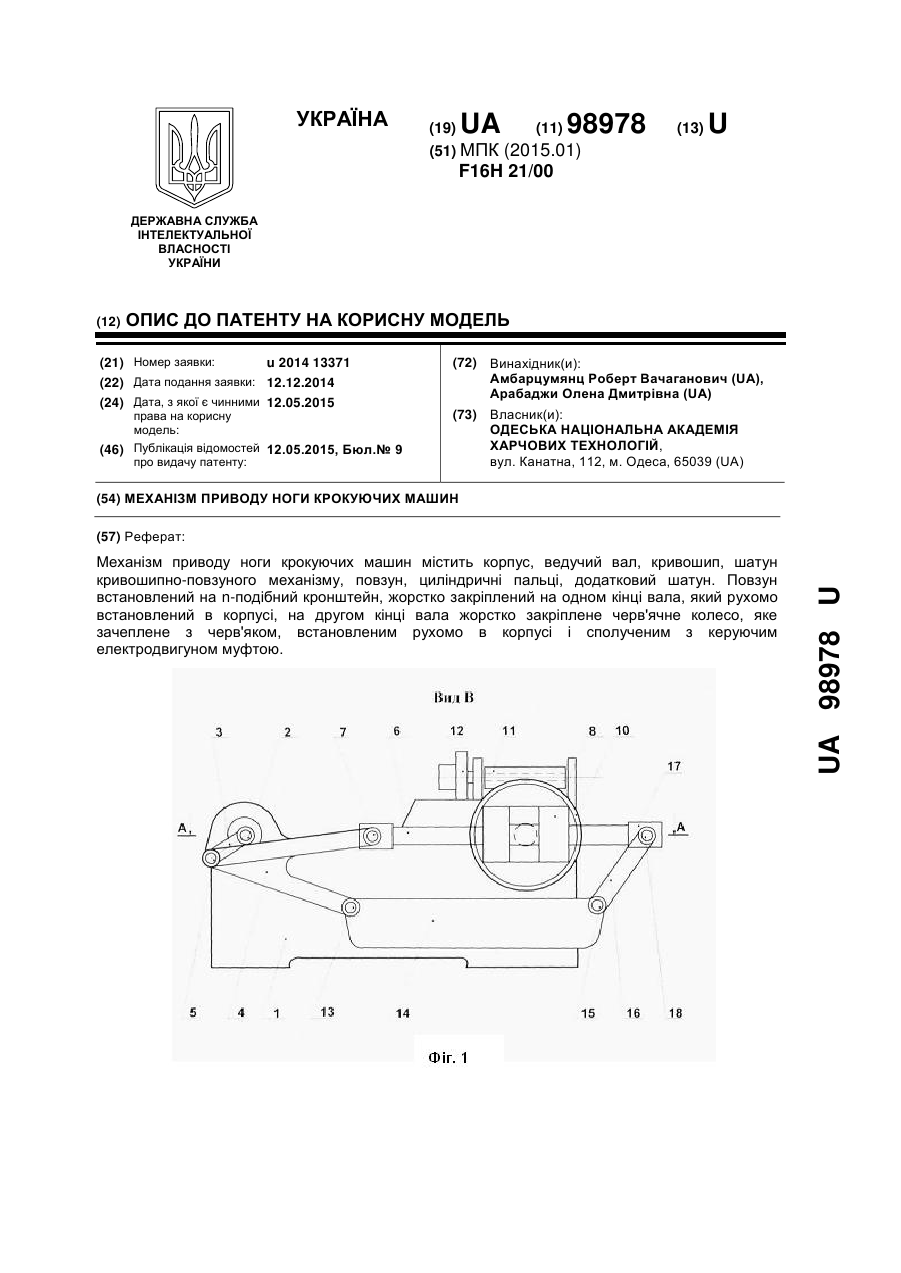
Механізм приводу ноги крокуючих машин, що містить корпус, ведучий вал, кривошип, шатун кривошипно-повзуного механізму, повзун, циліндричні пальці, додатковий шатун, який відрізняється тим, що повзун встановлений на n-подібний кронштейн, жорстко закріплений на одном кінці вала, який рухомо встановлений в корпусі, на другом кінці вала жорстко закріплене черв'ячне колесо, яке зачеплене з черв'яком, встановленим рухомо в корпусі і сполученим з...
Регульований зубчасто-важільний механізм

Номер патенту: 31037
Опубліковано: 25.03.2008
Автори: Амбарцумянц Роберт Вачаганович, Тутаєв Сергій Валерійович
МПК: F16H 29/00
Мітки: зубчасто-важільний, механізм, регульованій
Формула / Реферат:
Регульований зубчасто-важільний механізм, що містить ведучий та ведений вали, сателіти, центральне колесо, водило, шатуни, кривошипи, вихідну ланку, який відрізняється тим, що вихідна ланка складається з циліндричних стрижнів і фланця, що має циліндричні пази і співвісний з ведучим валом отвір, у якому встановлений шток, на одному кінці якого рухомо встановлена втулка, до якої одним кінцем шарнірно кріпляться важелі однакової довжини, інший...
Регульований шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта
Номер патенту: 87316
Опубліковано: 10.02.2014
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович, Арабаджи Олена Дмитрівна
МПК: F16H 21/00
Мітки: об'єкта, переміщення, шарнірно-важільний, шестиланковий, механізм, поступального, регульованій
Формула / Реферат:
Шестиланковий важільний механізм поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, шатун кривошипно-повзунного механізму, повзун, додатковий шатун, циліндричні пальці, який відрізняється тим, що на циліндричному пальці шарнірного з'єднання шатуна кривошипно-повзунного механізму і повзуна рухливо і співісно з пальцем встановлено черв'ячне колесо, зачеплене з черв'яком, рухливо встановленим на підставі, жорстко...
Механізм приводу ножів триножових різальних машин
Номер патенту: 63711
Опубліковано: 15.01.2004
Автори: Хведчин Юрій Йосипович, Пасіка Вячеслав Романович, Полюдов Олександр Миколайович
МПК: F16H 21/00, B26D 1/00
Мітки: приводу, механізм, машин, різальних, ножів, триножових
Формула / Реферат:
Механізм приводу ножів триножової різальної машини, що включає кривошип, шатун і повзун, що з’єднані між собою, який відрізняється тим, що додатково містить нерухомий кулачок, а кривошип виконаний у вигляді привідного повзуна з кулісою, на одному кінці якої розміщений ролик, при цьому куліса з’єднана з нерухомим кулачком через ролик, що обкочує його, а другий кінець куліси приєднаний до шатуна.
Механізм приводу робочих органів сільськогосподарських машин
Номер патенту: 77806
Опубліковано: 15.01.2007
Автори: Павлик Володимир Іванович, Кумпан Віктор Карпович, Яблуновський Василь Сергійович, Пейчев Савва Васильович
МПК: A01D 34/00, A01B 71/00
Мітки: механізм, робочих, сільськогосподарських, приводу, органів, машин
Формула / Реферат:
Механізм приводу робочих органів сільськогосподарських машин, який містить ексцентрик та вал, з’єднані між собою хомутом, які мають в місцях з’єднання лиски, хомут стягує вал і ексцентрик, а внутрішня поверхня хомута у поперечному перерізі виконана у вигляді паза, який відрізняється тим, що радіуси вала, ексцентрика та поверхонь, якими закінчується паз, рівні між собою та є рівними по значенню половині розміру ширини паза, а розміри
Попередній патент: Фундамент під опори ліній електропередач
Наступний патент: Пристрій синхронного гамма-гамма-каротажу з електронним інклінометром
Випадковий патент: Агрегат борін