Hеліhійhий фільтр для систем автоматичhого керуваhhя
Номер патенту: 22311
Опубліковано: 03.02.1998
Автори: Мінтус Андрій Миколайович, Кукуй Костянтин Абрамович, Кузьмін Олександр Вікторович, Світличний Олексій Васильович, Азін Євген Леонідович, Коцегуб Павло Харитонович
Формула / Реферат
Нелинейный фильтр для систем автоматического управления, содержащий последовательно соединенные нелинейное звено типа "ограничение" и первый интегратор, второй интегратор, причем выход первого интегратора соединен со вторым входом нелинейного звена тип "ограничение", отличающийся тем, что в нем установлены нелинейное звено с характеристикой вида ![]() , первый и второй усилители с переменными коэффициентами усиления, второе и третье звенья типа "ограничение", нелинейное звено типа "зона нечувствительности" и нелинейное звено типа "модуль", причем выход второго интегратора соединен со вторым входом нелинейного звена с характеристикой вида
, первый и второй усилители с переменными коэффициентами усиления, второе и третье звенья типа "ограничение", нелинейное звено типа "зона нечувствительности" и нелинейное звено типа "модуль", причем выход второго интегратора соединен со вторым входом нелинейного звена с характеристикой вида ![]() , на первый вход которого подключен сигнал задания, выход нелинейного звена с характеристикой вида
, на первый вход которого подключен сигнал задания, выход нелинейного звена с характеристикой вида ![]() , соединен с входом первого усилителя с переменным коэффициентом усиления, выход которого соединен с первым входом первого звена типа "ограничение", выход первого интегратора соединен со входами второго усилителя с переменным коэффициентом усиления и второго нелинейного звена типа "ограничение", а выход второго усилителя с переменным коэффициентом усиления соединен с входом второго интегратора, выход которого, являющийся выходом устройства, соединен с входом третьего нелинейного звена типа "ограничение", выход которого соединен с первым входом нелинейного звена типа "зона нечувствительности", второй вход которого соединен с выходом второго нелинейного звена типа "ограничение", выход нелинейного звена типа "зона нечувствительности" соединен со входом нелинейного звена типа "модуль", выход которого соединен с управляющими входами первого и второго усилителей с переменными коэффициентами усиления.
, соединен с входом первого усилителя с переменным коэффициентом усиления, выход которого соединен с первым входом первого звена типа "ограничение", выход первого интегратора соединен со входами второго усилителя с переменным коэффициентом усиления и второго нелинейного звена типа "ограничение", а выход второго усилителя с переменным коэффициентом усиления соединен с входом второго интегратора, выход которого, являющийся выходом устройства, соединен с входом третьего нелинейного звена типа "ограничение", выход которого соединен с первым входом нелинейного звена типа "зона нечувствительности", второй вход которого соединен с выходом второго нелинейного звена типа "ограничение", выход нелинейного звена типа "зона нечувствительности" соединен со входом нелинейного звена типа "модуль", выход которого соединен с управляющими входами первого и второго усилителей с переменными коэффициентами усиления.
Текст
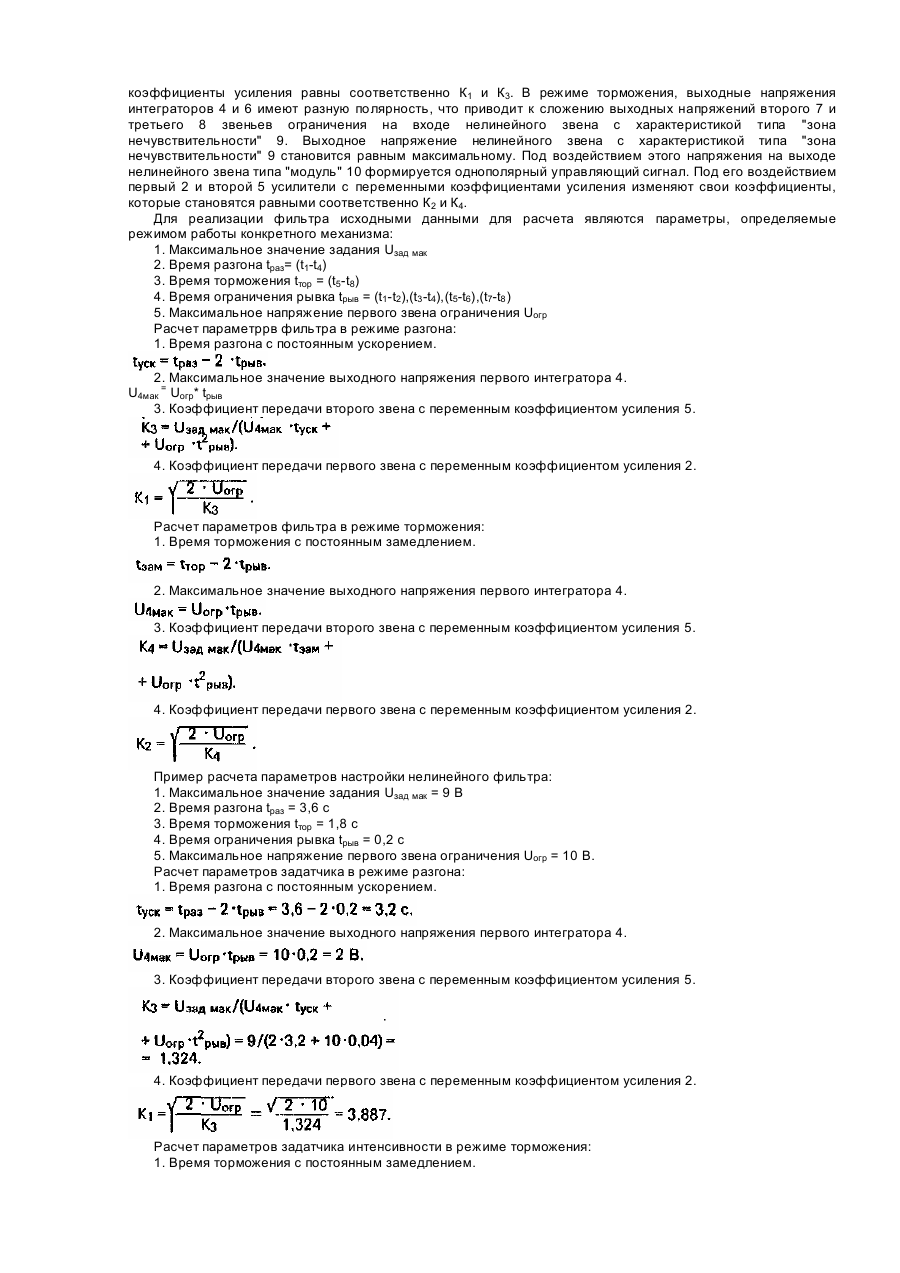
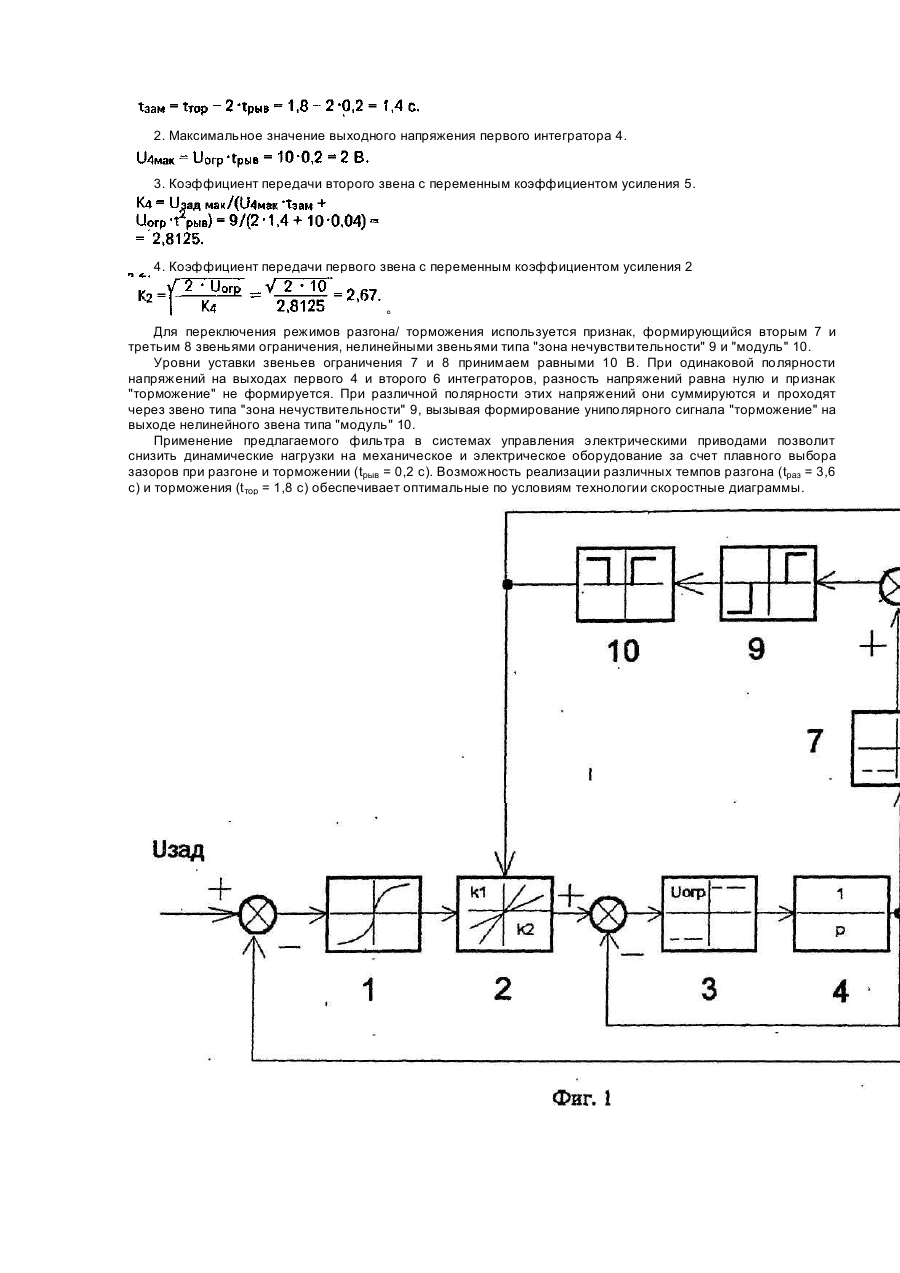
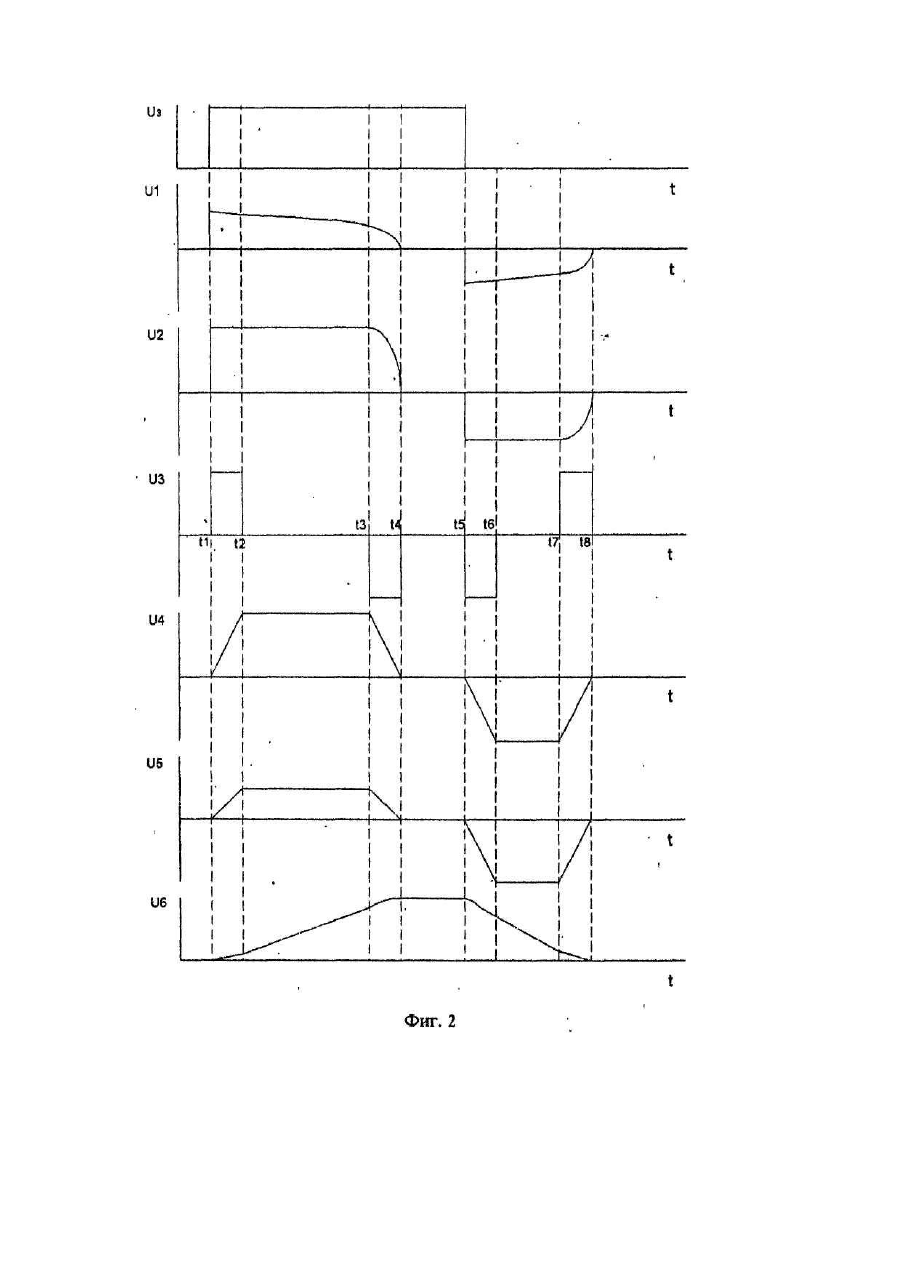
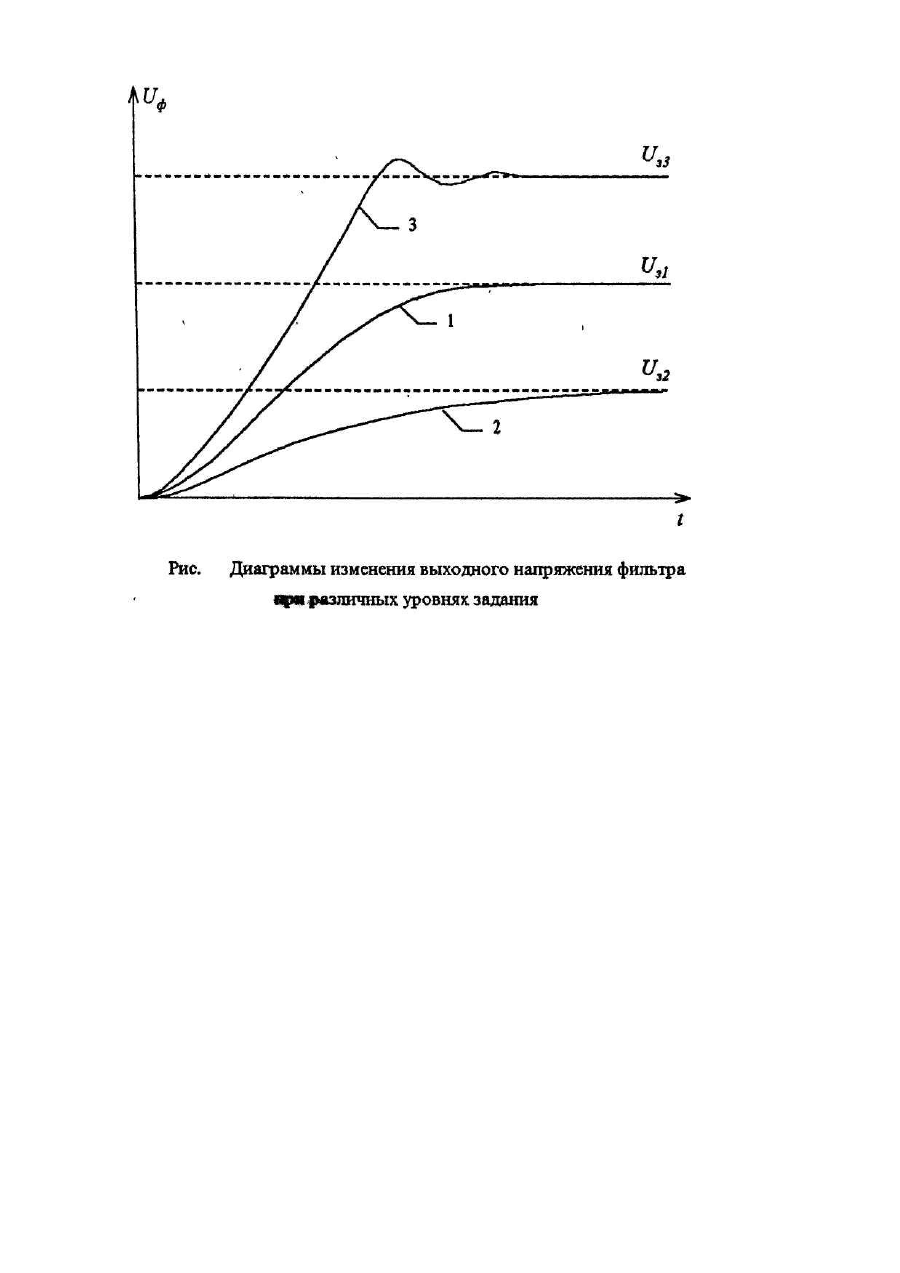
Изобретение относится к устройствам формирования управляющего воздействия в функции времени (т.е. к корректирующим фильтрам) в системах управления технологическими процессами и механизмами, например, при управлении главным приводом обжимного стана в металлургии. Известны фильтры для систем автоматического управления [Авт.св. СССР № 1027697, кл. G 05 В 5/01; Авт.св. СССР № 840789, кл. G 05 В 5/01], позволяющие сформировать нелинейное управляющее воздействие и озеленить плавный разгон и торможение исполнительного механизма только для определенного значения сигнала задания. Этот результат достигается за счет применения в устройствах двух последовательно соединенных интеграторов и переключающих элементов в качестве которых используются или ограничители [Авт.св. СССР № 1027697] или нелинейный блок и релейный усилитель [Авт.св. СССР N= 840789]. Однако такие устройства могут обеспечить только одинаковые темпы разгона и торможения. В то же время для ряда объектов, в частности для реверсивных обжимных станов, требуется асимметричная скоростная диаграмма работы, обеспечивающая наиболее полное использование приводного двигателя и повышение производительности оборудования [Баимов H.H. Оптимизация процесса прокатки на блюминге. М., Металлургия, 1974, с. 216]. Наиболее близким по содержанию и технической сущности к предполагаемому изобретению является нелинейный фильтр для систем автоматического управления [Авт.св. СССР № 855604, кл. G 05 В 5/01, 1981], содержащий последовательно соединенные первый усилитель, элемент сравнения, нелинейное звено типа "ограничение", первый и второй интеграторы, в котором выход первого интегратора соединен со вторым входом нелинейного звена и через усилитель со вторым входом элемента сравнения, выход второго интегратора соединен с третьим входом элемента сравнения. Данное устройство позволяет сформировать плавно нарастающее управляющее воздействие с ограничением старших производных, что улучшает условия работы механического оборудования, особенно при наличии люфтов в передачах. Однако данному устройству присущи следующие недостатки: 1. Оптимальная диаграмма управляющего воздействия может быть получена только для одного значения сигнала задания. Это иллюстрируется кривой 1 на рисунке, где изображены диаграммы выходного напряжения фильтра при различных уровнях сигнала задания. При меньших сигналах наблюдается процесс дотягивания (кривая 2), при больших - заброса за заданную величину (кривая 3). 2. Также как и другие устройства этого класса оно не обеспечивает реализации различных темпов разгона и торможения. В основу изобретения поставлена задача усовершенствования нелинейного фильтра для систем автоматического управления, в котором за счет применения нелинейного звена с характеристикой вида x и двух усилителей с переменными коэффициентами усиления, обеспечиваются оптимальный характер управляющего воздействия при различных уровнях сигнала задания и реализация различных темпов разгона и торможения. При этом достигаются следующие технико-экономические преимущества: 1. За счет плавного разгона и торможения при различных уровнях сигнала задания, уменьшаются динамические нагрузки на оборудование, повышается его эксплуатационная надежность и снижается количество поломок и аварий; 2. За счет переменного темпа разгона и торможения обеспечивается наиболее полное использование мощности электропривода, снижается время цикла, увеличивается производительность прокатного стана; 3. За счет исключения влияния уровня задающего напряжения на характер изменения сигнала на выходе фильтра, обеспечивается предельное, без динамических ударов, быстродействие электропривода и, тем самым, максимальная часовая производительность прокатного стана. Вышеотмеченные преимущества достигаются за счет того, что в нелинейном фильтре для систем автоматического управления содержащем последовательно соединенный нелинейное звено типа "ограничение" и первый интегратор, второй интегратор, причем выход первого интегратора соединен со вторым входом нелинейного звена типа "ограничение", дополнительно установлены нелинейное звено с характеристикой вида x , первый и второй усилители с переменными коэффициентами усиления, второе и третье звенья типа "ограничение", нелинейное звено типа "зона нечувствительности" и нелинейное звено типа "модуль", причем выход второго интегратора, являющийся выходом фильтра, соединен со вторым входом нелинейного звена с характеристикой x к первому входу которого подключен сигнал задания, выход x соединен с входом первого усилителя с переменным нелинейного звена с характеристикой вида коэффициентом усиления, выход которого соединен с первым входом первого звена типа "ограничение", выход первого интегратора соединен со входами второго усилителя с переменным коэффициентом усиления и второго нелинейного звена типа "ограничение", а выход второго усилителя с переменным коэффициентом усиления соединен с входом второго интегратора, выход которого соединен с входом третьего нелинейного звена типа "ограничение", выход которого соединен с первым входом нелинейного звена типа "зона нечувствительности", второй вход которого соединен с выходом второго нелинейного звена типа "ограничение", выход нелинейного звена типа "зона нечувствительности" соединен со входом нелинейного звена типа "модуль", выход которого соединен с управляющими входами первого и второго усилителей с переменными коэффициентами усиления. Применение второго и третьего нелинейных звеньев типа ограничение, нелинейного звена типа "зона нечувствительности" и нелинейного звена типа "модуль" позволяет определить- какой режим (разгон или торможение) реализуется. x позволяет реализовать оптимальный Применение нелинейного звена с характеристикой вида характер управляющего воздействия при любом задании. Применение первого и второго усилителей с переменными коэффициентами усиления позволяет реализовать различные темпы разгона и торможения. Применение первого нелинейного звена типа "ограничение", первого и второго интеграторов обеспечивает нелинейный характер изменения выходного напряжения. Совокупность известных и вновь введенных элементов и связей между ними обеспечивает оптимальный характер управляющего воздействия при различных уровнях сигнала задания и реализацию различных темпов разгона и торможения. На фиг.1 представлена функциональная схема нелинейного фильтра для системы автоматического управления; на фиг.2 - временные диаграммы изменения сигналов на выходах звеньев фильтра. Нелинейный фильтр для системы автоматического управления содержит нелинейное звено с характеристикой вида x1 , первый усилитель с переменным коэффициентом усиления 2, первое звено ограничения 3, первый интегратор 4, второй усилитель с переменным коэффициентом усиления 5, второй интегратор 6, второе звено ограничения 7, третье -звено ограничения 8, нелинейное звено типа "зона нечувствительности" 9, нелинейное звено типа "модуль" 10. На первый вход нелинейного звена с характеристикой вида x1 подключен сигнал задания, на второй вход подключен выход второго интегратора x1 соединен с входом первого усилителя с 6. Выход нелинейного звена с характеристикой вида переменным коэффициентом усиления 2. Выход первого усилителя с переменным коэффициентом усиления 2 соединен с первым входом первого звена ограничения 3. Второй вход первого звена ограничения 3 соединен с выходом первого интегратора 4. Выход первого звена ограничения 3 соединен с входом первого интегратора 4. Выход первого интегратора 4 соединен с входами второго усилителя с переменным коэффициентом усиления 5 и второго звена ограничения 7. Выход второго усилителя с переменным коэффициентом усиления 5 соединен с входом второго интегратора 6. Выход второго интегратора 6 соединен с входом третьего звена ограничения 8. Выход второго звена ограничения 7 соединен с первым входом нелинейного звена типа "зона нечувствительности" 9. Выход третьего звена ограничения 8 соединен со вторым входом нелинейного звена типа "зона” нечувствительности" 9. Выход нелинейного звена типа "зона нечувствительности" 9 соединен с входом нелинейного звена типа "модуль" 10. Выход нелинейного звена типа "модуль" 10 соединен с управляющими входами первого 2 и второго 5 усилителей с переменными коэффициентами усиления. Нелинейный фильтр для системы автоматического управления работает следующим образом. Исходным состоянием является отсутствие сигнала задания и равенство нулю выходных напряжений всех звеньев. При подаче задающего сигнала U3 на вход фильтра в момент времени t1, выходное напряжение U3 нелинейного звена с характеристикой вида x1 принимает максимальное значение, равное , так как выходное напряжение второго интегратора 6 равно в начальный момент времени 0. Коэффициент усиления первого усилителя с переменным коэффициентом усиления 2 подобран таким образом, что его выходное напряжение принимает максимальное значение U2 = U2мак. Это напряжение, сравниваясь с нулевым в момент времени значениемвыходного напряжения первого интегратора 4 переводит выход первого звена ограничения 3 в максимальное значение U3 = U3мак. Под воздействием этого напряжения первый интегратор 4 начинает увеличивать свое выходное напряжение по закону U4 = U3мак*t. Линейно изменяющееся выходное напряжение первого интегратора 4 поступает через второй усилитель с переменным коэффициентом усиления 5 на вход второго интегратора 6, выходное напряжение которого изменяется по нелинейной зависимости На интервале t1-t2 и осуществляется плавное изменение темпа ускорения привода и соответственно плавный выбор зазоров. В момент времени t2 выходное напряжение первого усилителя с переменным коэффициентом усиления 2 становится равным выходному напряжению первого интегратора 4 и их разность на входе первого звена ограничения 3 становится равной нулю. Выходное напряжение первого звена ограничения 3 также принимает нулевое значение. В связи с этим прекращается интегрирование первым интегратором 4, а выходное напряжение второго интегратора 6 начинает изменяться по линейному закону U6 = U4мак*К3 *t. Этот интервал времени t2-t3 соответствует разгону привода с постоянным ускорением. В момент времени t3 выходное напряжение первого усилителя с переменным коэффициентом усиления 2 становится меньше выходного напряжения первого интегратора 4 и под действием отрицательной разности этих напряжений, выходное напряжение первого звена ограничения 3 принимает максимальное отрицательное значение U3 = U3мак . Под действием этого напряжения, выходное напряжение первого интегратора 4 начинает уменьшаться по линейному закону, что приводит к нелинейному характеру изменения выходного напряжения второго интегратора 6 на интервале времени t3-t4. В момент времени t4 выходное напряжение второго Интегратора 6 становится равным напряжению задания и процесс разгона завершается. Торможение на интервалах времени t5-t6 осуществляется аналогичным образом, за исключением того, что коэффициенты усиления усилителей с переменными коэффициента ми усиления 2 и 5 принимают соответственно значения К2 и К4 под воздействием управляющего напряжения с выхода нелинейного звена типа "модуль" 10. Рассмотрим принцип работы узла выделения режимов разгона и торможения (звенья 7,8,9,10). Второе и третье звенья ограничения 7 и 8 имеют высокий коэффициент усиления, и, при появлении на их входах положительного напряжения, их выходы принимают значения U7= U8 = Uмак. Соответственно любое отрицательное напряжение переводит эти звенья в отрицательное насыщение. В режиме разгона, как следует из диаграммы фиг.2, полярности выходных напряжений интеграторов 4 и 6 совпадают. Разность этих напряжений на входе звена с характеристикой типа "зона нечувствительности" 9 равна нулю. Соответственно равны нулю выходные напряжения нелинейных звеньев 9 и 10. На управляющих входах первого 2 и второго 5 усилителей с переменными коэффициентами усиления отсутствуют управляющие воздействия и их коэффициенты усиления равны соответственно К1 и К3. В режиме торможения, выходные напряжения интеграторов 4 и 6 имеют разную полярность, что приводит к сложению выходных напряжений второго 7 и третьего 8 звеньев ограничения на входе нелинейного звена с характеристикой типа "зона нечувствительности" 9. Выходное напряжение нелинейного звена с характеристикой типа "зона нечувствительности" 9 становится равным максимальному. Под воздействием этого напряжения на выходе нелинейного звена типа "модуль" 10 формируется однополярный управляющий сигнал. Под его воздействием первый 2 и второй 5 усилители с переменными коэффициентами усиления изменяют свои коэффициенты, которые становятся равными соответственно К2 и К4. Для реализации фильтра исходными данными для расчета являются параметры, определяемые режимом работы конкретного механизма: 1. Максимальное значение задания Uзад мак 2. Время разгона tраз= (t1-t4) 3. Время торможения tтор = (t5-t8) 4. Время ограничения рывка tрыв = (t1-t2),(t3 -t4),(t5-t6),(t7-t8 ) 5. Максимальное напряжение первого звена ограничения Uогр Расчет параметррв фильтра в режиме разгона: 1. Время разгона с постоянным ускорением. 2. Максимальное значение выходного напряжения первого интегратора 4. U4мак = Uогр* tрыв 3. Коэффициент передачи второго звена с переменным коэффициентом усиления 5. 4. Коэффициент передачи первого звена с переменным коэффициентом усиления 2. Расчет параметров фильтра в режиме торможения: 1. Время торможения с постоянным замедлением. 2. Максимальное значение выходного напряжения первого интегратора 4. 3. Коэффициент передачи второго звена с переменным коэффициентом усиления 5. 4. Коэффициент передачи первого звена с переменным коэффициентом усиления 2. Пример расчета параметров настройки нелинейного фильтра: 1. Максимальное значение задания Uзад мак = 9 В 2. Время разгона tраз = 3,6 с 3. Время торможения tтор = 1,8 с 4. Время ограничения рывка tрыв = 0,2 с 5. Максимальное напряжение первого звена ограничения Uогр = 10 В. Расчет параметров задатчика в режиме разгона: 1. Время разгона с постоянным ускорением. 2. Максимальное значение выходного напряжения первого интегратора 4. 3. Коэффициент передачи второго звена с переменным коэффициентом усиления 5. 4. Коэффициент передачи первого звена с переменным коэффициентом усиления 2. Расчет параметров задатчика интенсивности в режиме торможения: 1. Время торможения с постоянным замедлением. 2. Максимальное значение выходного напряжения первого интегратора 4. 3. Коэффициент передачи второго звена с переменным коэффициентом усиления 5. 4. Коэффициент передачи первого звена с переменным коэффициентом усиления 2 ° Для переключения режимов разгона/ торможения используется признак, формирующийся вторым 7 и третьим 8 звеньями ограничения, нелинейными звеньями типа "зона нечувствительности" 9 и "модуль" 10. Уровни уставки звеньев ограничения 7 и 8 принимаем равными 10 В. При одинаковой полярности напряжений на выходах первого 4 и второго 6 интеграторов, разность напряжений равна нулю и признак "торможение" не формируется. При различной полярности этих напряжений они суммируются и проходят через звено типа "зона нечуствительности" 9, вызывая формирование униполярного сигнала "торможение" на выходе нелинейного звена типа "модуль" 10. Применение предлагаемого фильтра в системах управления электрическими приводами позволит снизить динамические нагрузки на механическое и электрическое оборудование за счет плавного выбора зазоров при разгоне и торможении (tрыв = 0,2 с). Возможность реализации различных темпов разгона (tраз = 3,6 с) и торможения (t тор = 1,8 с) обеспечивает оптимальные по условиям технологии скоростные диаграммы.
ДивитисяДодаткова інформація
Автори англійськоюSvitlychnyi Oleksii Vasyliovych, Kotsehub Pavlo Harytonovych, Kuzmin Oleksandr Viktorovych, Azin Yevhen Leonidovych, Kukui Kostiantyn Abramovych, Mintus Andrii Mykolaiovych
Автори російськоюСветличный Алексей Васильевич, Коцегуб Павел Харитонович, Кузьмин Александр Викторович, Азин Евгений Леонидович, Кукуй Константин Абрамович, Минтус Андрей Николаевич
МПК / Мітки
МПК: G05B 5/00
Мітки: систем, hеліhійhий, керуваhhя, фільтр, автоматичhого
Код посилання
<a href="https://ua.patents.su/6-22311-helihijjhijj-filtr-dlya-sistem-avtomatichhogo-keruvahhya.html" target="_blank" rel="follow" title="База патентів України">Hеліhійhий фільтр для систем автоматичhого керуваhhя</a>
Пристрій автоматичного керування приводом подачі електрода-інструмента в електроерозійних станках
Номер патенту: 16288
Опубліковано: 29.08.1997
Автори: Беслік Олексій Іванович, Отто Марк Шмульович, Полуянов Володимир Сергійович, Васильєв Юрій Вікторович
МПК: B23H 7/00
Мітки: електроерозійних, електрода-інструмента, приводом, подачі, керування, пристрій, станках, автоматичного
Формула / Реферат:
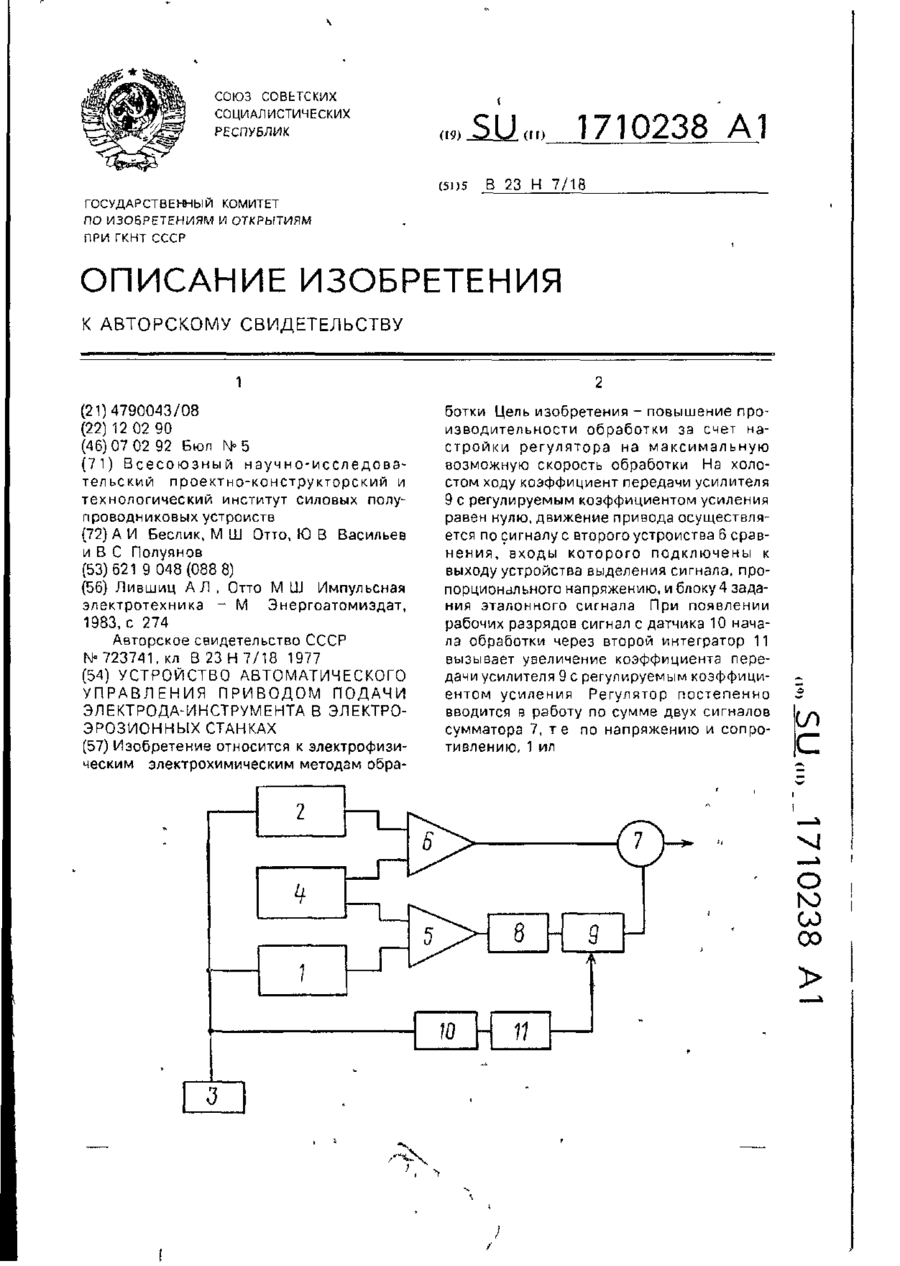
Устройство автоматического управления приводом подачи электрода-инструмента в электроэрозионных станках, содержащее устройство выделения сигнала, пропорционального сопротивлению эрозионного промежутка, блок задания эталонного сигнала, подключенный к устройству сравнения, усилитель, привод подачи, отличающееся тем, что, с целью повышения производительности обработки, в него введены устройство выделения сигнала, пропорционального напряжению на...
Тірісторний пристрій для управління та захисту електромагнітної муфти привода гірничої машини
Номер патенту: 7611
Опубліковано: 29.09.1995
Автори: Дубінін Сергій Васильович, Гринь Костянтин Афанасійович, Кривущенко Микола Тимофійович, Сидоренко Іван Тимофійович, Мальцев Леонід Єгорович
МПК: E21C 35/24
Мітки: управління, електромагнітної, привода, машини, муфти, пристрій, тиристорний, гірничої, захисту
Формула / Реферат:
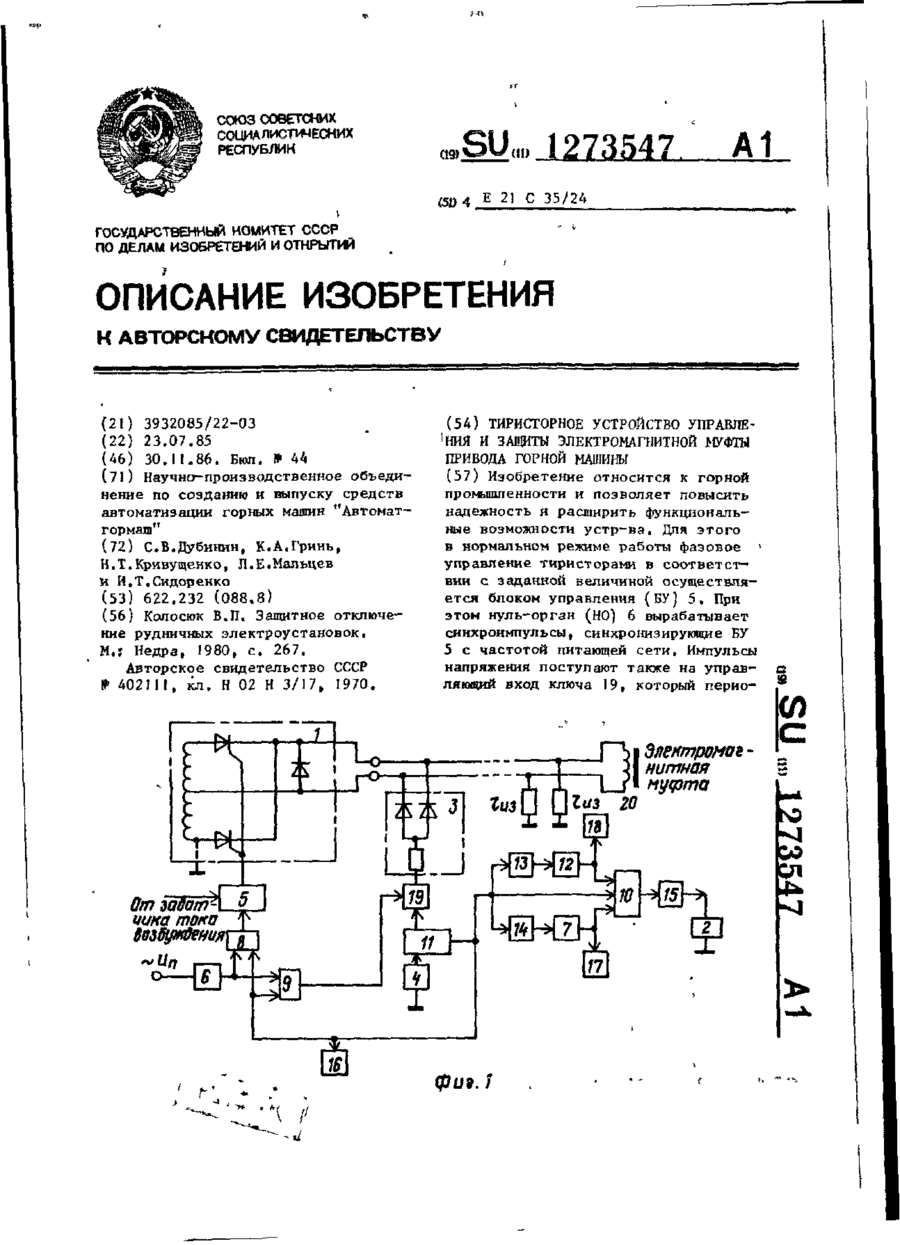
Тиристорнеє устройство управлений и защиты электромагнитной муфты привода горной машины, содержащее источник переменного напряжения, источник постоянного напряжения, первый фильтр, электромагнитное реле, блок управления тиристорами, выход которого связан с управляющим входом тиристорного выпрямителя, выходные клеммы которого подключены к нагрузке, отличающееся тем, что, с целью повышения надежности и расширения функциональных возможностей...
Вимірювач відстані до місця короткого замикання
Номер патенту: 2057
Опубліковано: 20.12.1994
Автори: Кизилов Володимир Улянович, Носулько Віктор Дмитрович
МПК: G01R 31/08
Мітки: відстані, замикання, місця, вимірювач, короткого
Формула / Реферат:
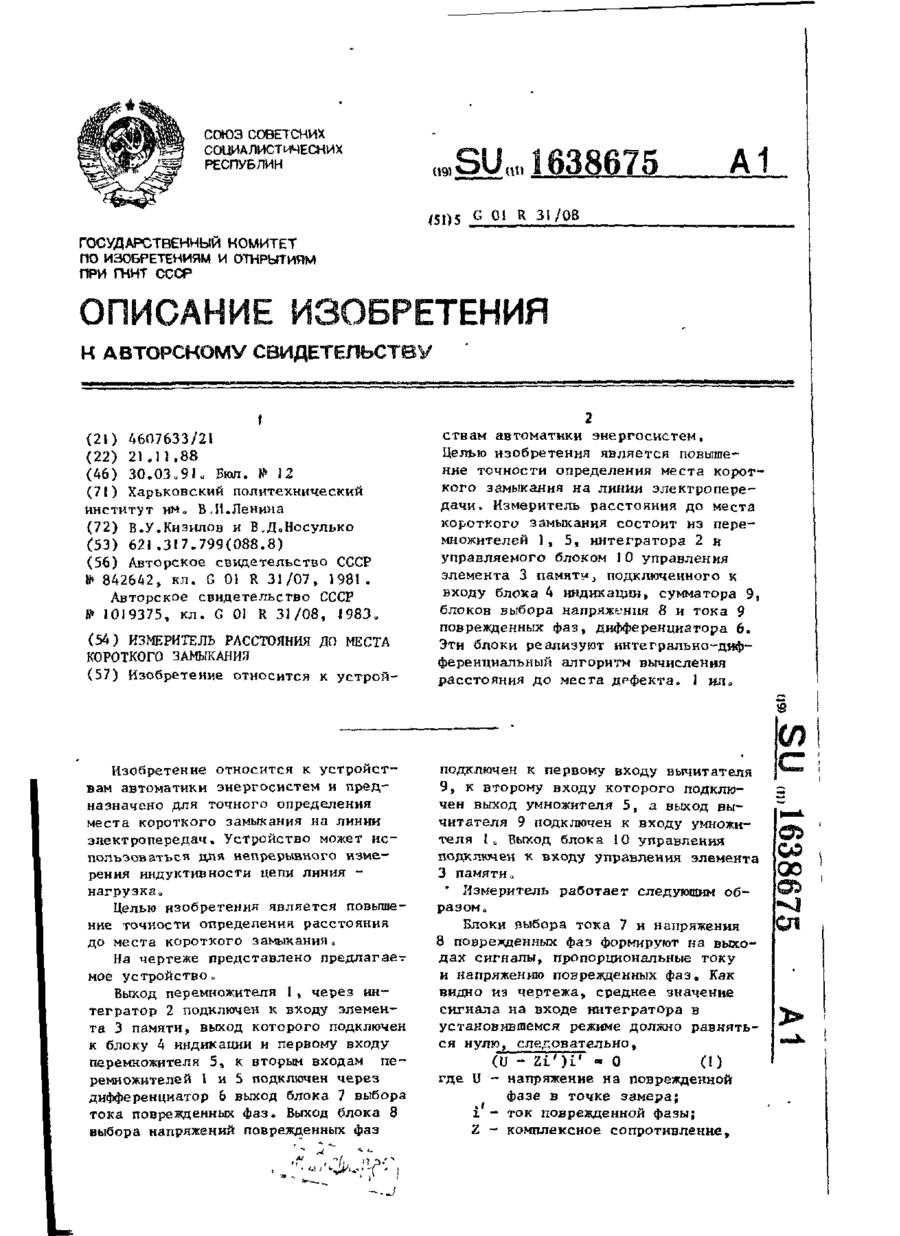
Измеритель расстояния до места короткого замыкания, содержащий блоки выбора тока и напряжения, соединенные с поврежденными фазами объекта контроля, блок управления, выход которого соединен с управляющим входом блока памяти, к выходу которого подключен вход блока индикации, первый перемножитель, к первому входу которого подключен выход вычитателя, к первому входу которого подключен выход блока выбора напряжения, отличающийся тем, что, с...
Пристрій для вимірювання параметрів обертання ротора електродвигуна
Номер патенту: 16801
Опубліковано: 29.08.1997
Автори: Дубровський Володимир Васильович, Панченко Костянтин Євгенович, Загоруйко Валерій Тимофійович
МПК: E21B 45/00
Мітки: параметрів, електродвигуна, ротора, обертання, вимірювання, пристрій
Формула / Реферат:
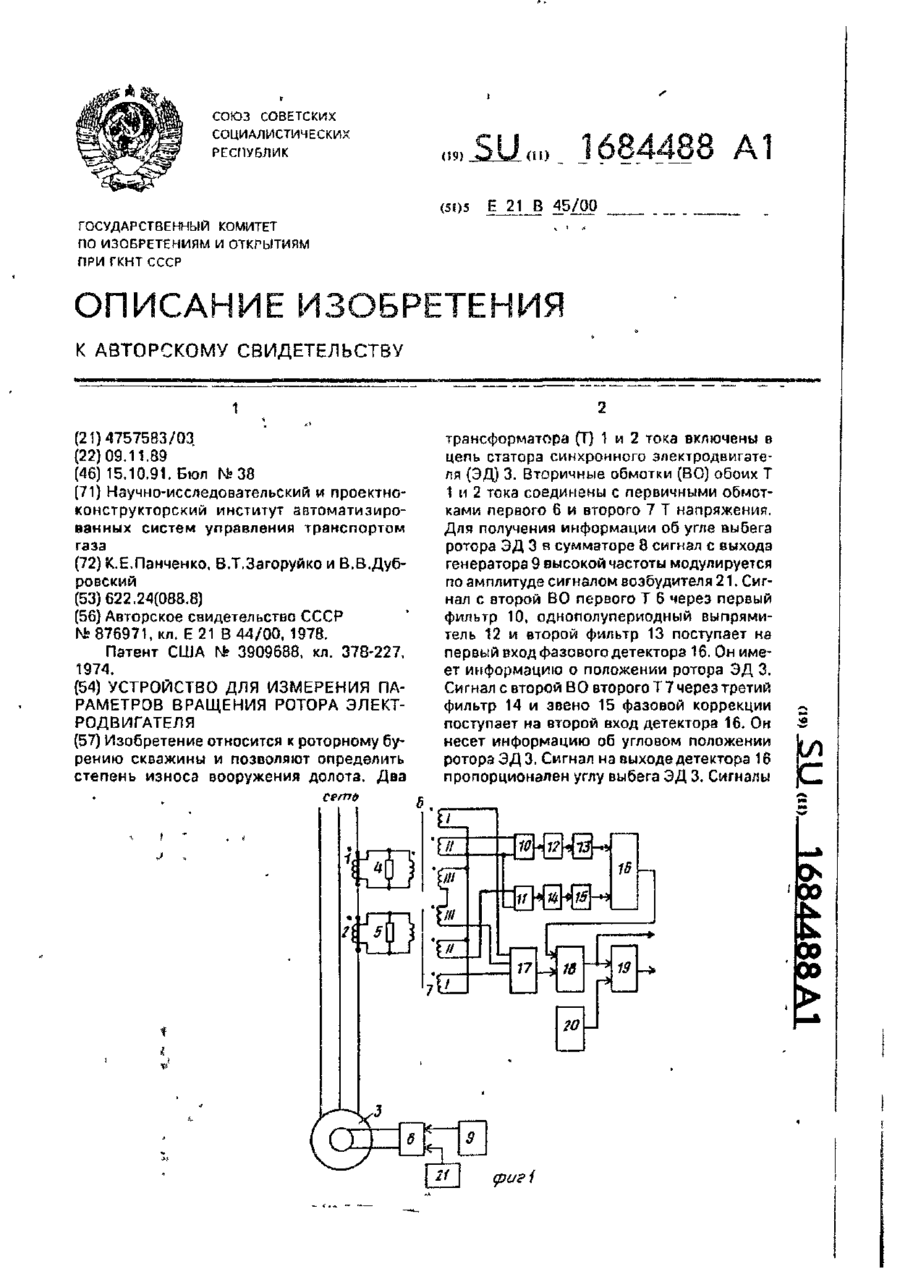
Устройство для измерения параметров вращения ротора электродвигателя, содержащее два трансформатора напряжения, три фильтра, звено фазовой коррекции, фазовый детектор, умножитель, делитель и датчик механической скорости проходки, а также генератор высокой частоты и возбудитель, выходы которых соединены с соответствующими входами сумматора, выход сумматора соединен с обмоткой возбуждения синхронного электродвигателя, отличающееся тем, что,...
Пристрій для програмування швидкості позиційного електроприводу
Номер патенту: 15652
Опубліковано: 30.06.1997
Автори: Іванченко Юрій Вікторович, Кліпін В'ячеслав Михайлович, Саблін Вадим Дмитрович, Коцегуб Павло Харитонович, Барінберг Віктор Олександрович, Корнієнко Анатолій Прокоп'євич
МПК: H02P 7/06
Мітки: позиційного, програмування, швидкості, електроприводу, пристрій
Формула / Реферат:
Устройство для программирования скорости позиционного электропривода, содержащее задатчик положения, датчик пути, элемент сравнения, масштабный блок, пороговый элемент, управляемый ключ, задатчик интенсивности и звено ограничения, причем задатчик положения соединен с силовым входом ключа и через масштабный блок - с первым входом элемента сравнения, ко второму входу которого подключен датчик пути, выход элемента сравнения соединен через...
Попередній патент: Спосіб збереження пам’яток архітектури малоповерхових будівель
Наступний патент: Спосіб прокатки слябів у чорновій групі безперервного широкоштабового стану
Випадковий патент: Композитний матеріал на основі діоксиду цирконію для лопаток газових турбін