Пристрій обробки кутомісцевої інформації в фазовій моноімпульсній радіолокаційній станції
Номер патенту: 51770
Опубліковано: 26.07.2010
Автори: Челпанов Артем Володимирович, Рибалка Григорій Валерійович, Кукобко Сергій Вікторович, Коломійцев Олексій Володимирович, Хмелевський Сергій Іванович


Формула / Реферат
Пристрій обробки кутомісцевої інформації в фазовій моноімпульсній радіолокаційній станції, що містить послідовно з'єднані вузол обробки сигналів, блок першого фазометра і вузол оцінки параметрів кутомісцевої траєкторії у складі послідовно з'єднаних блока пам'яті, цифрового корелятора, блока оцінки параметрів кутомісцевої фази і блока фільтрації та перерахунку параметрів, який відрізняється тим, що додатково введені послідовно з'єднані блок аналізу параметрів кутомісцевої траєкторії, блок корекції, блок фільтрації опорних точок фази, блок розрахунку параметрів балістичної траєкторії і блок аналізу достовірності, також вузол оцінки похідних дальності у складі послідовно з'єднаних блока другого фазометра, блока корелятора і блока оцінки похідних дальності, при цьому вихід блока фільтрації та перерахунку параметрів з'єднаний з входом блока аналізу параметрів кутомісцевої траєкторії, з другими входами блока корекції та блока розрахунку параметрів балістичної траєкторії, вхід блока другого фазометра з'єднаний із другим виходом блока аналізу достовірності, входом пристрою є двоканальний вхід вузла обробки сигналів, а виходами пристрою - виходи блока аналізу достовірності та блока оцінки похідних дальності.
Текст
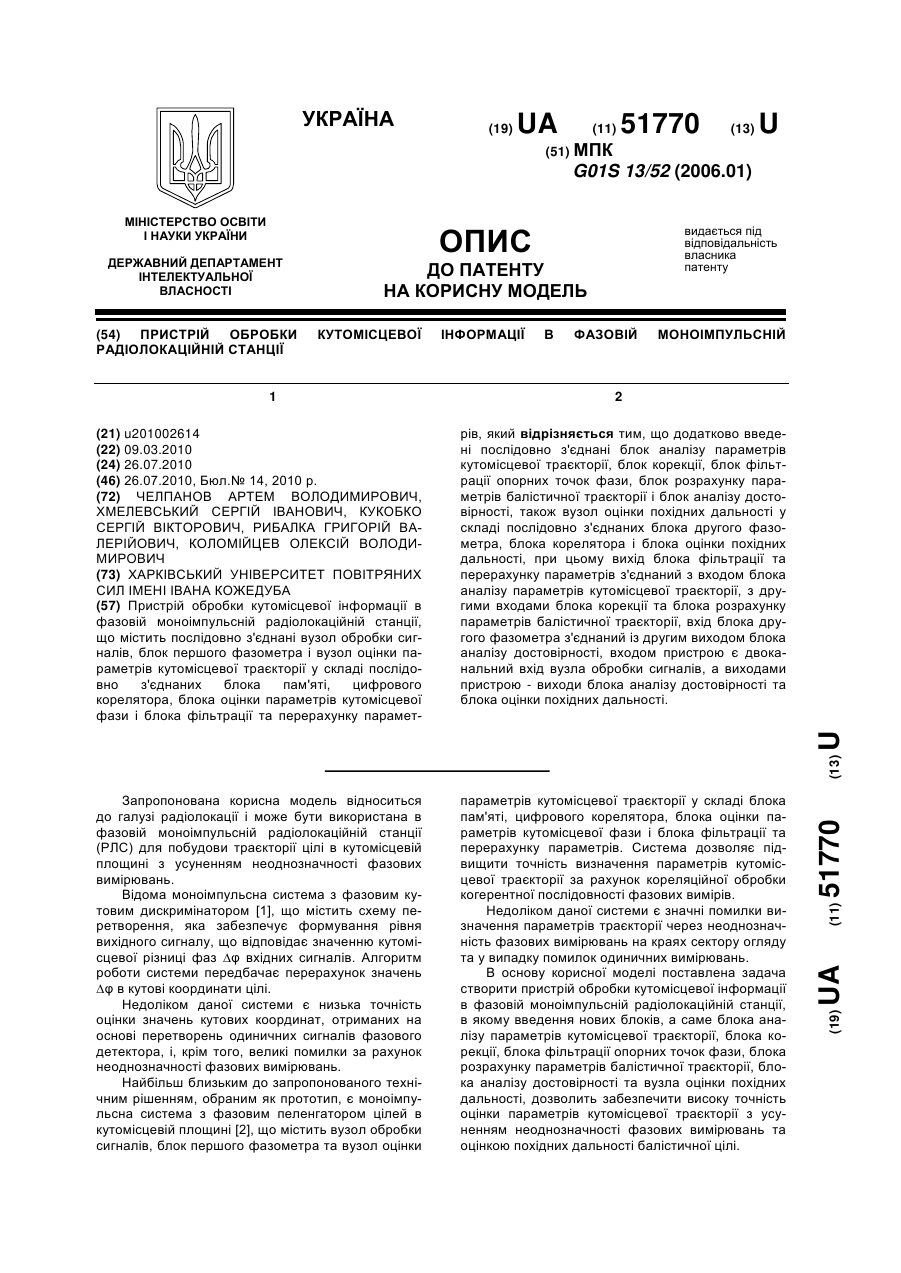
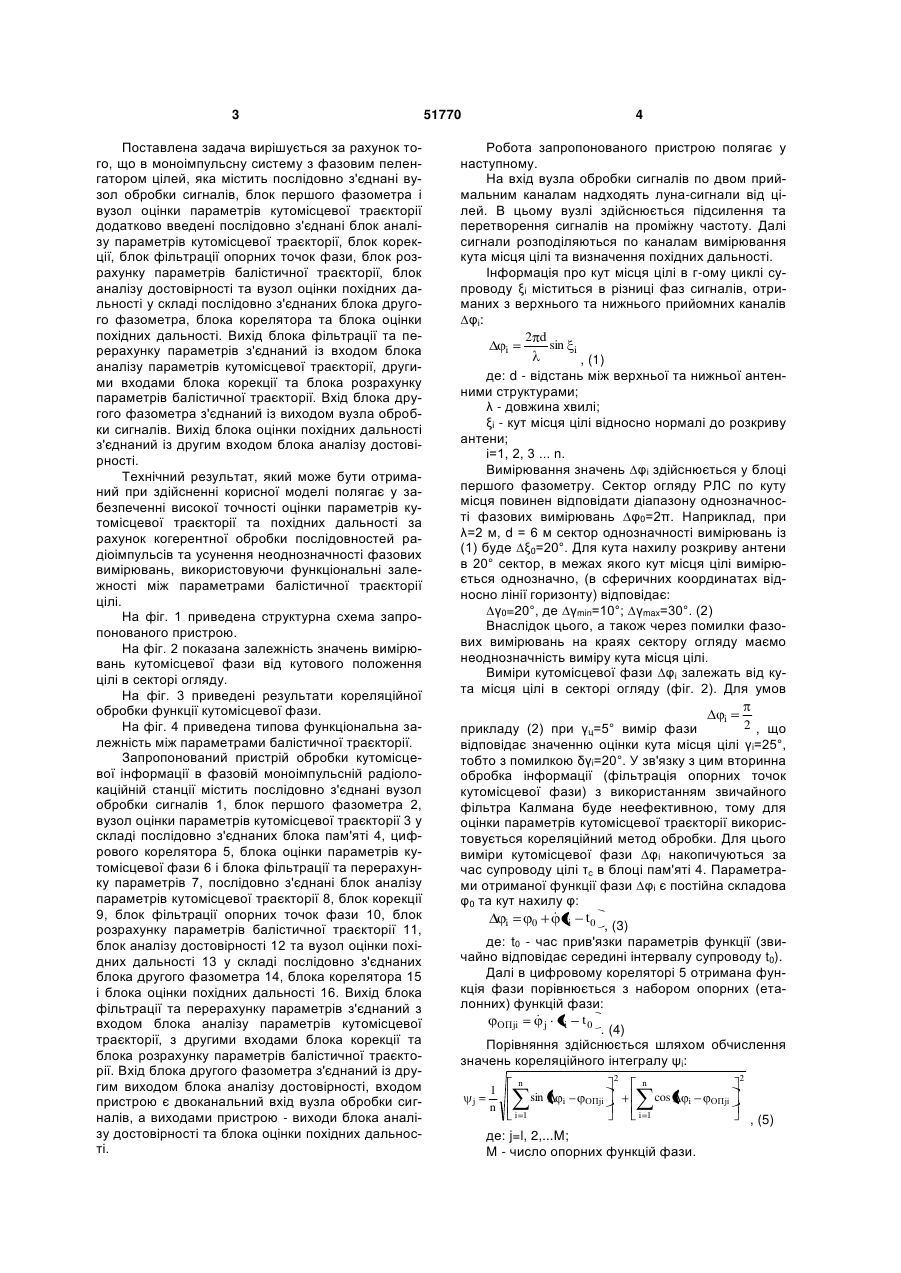
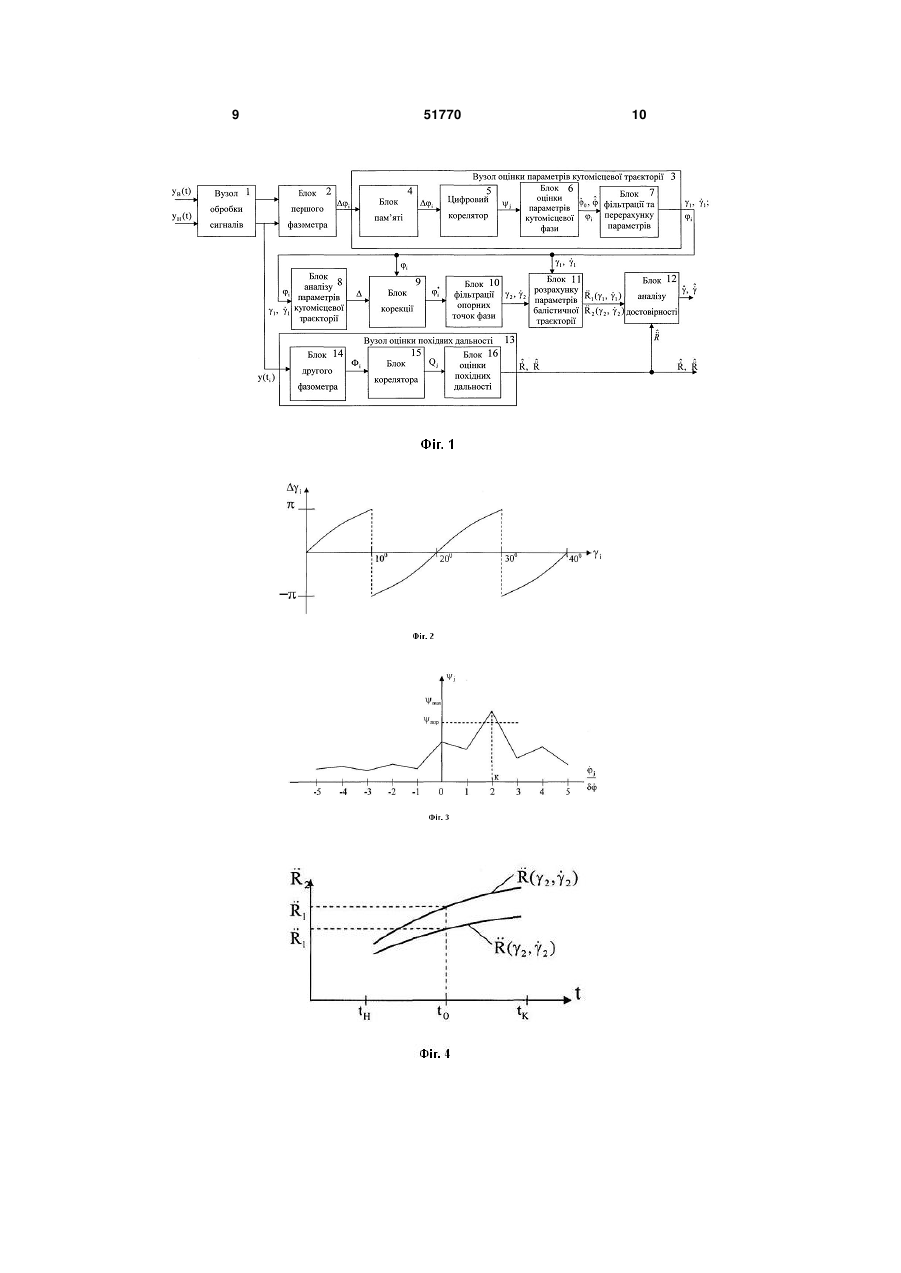
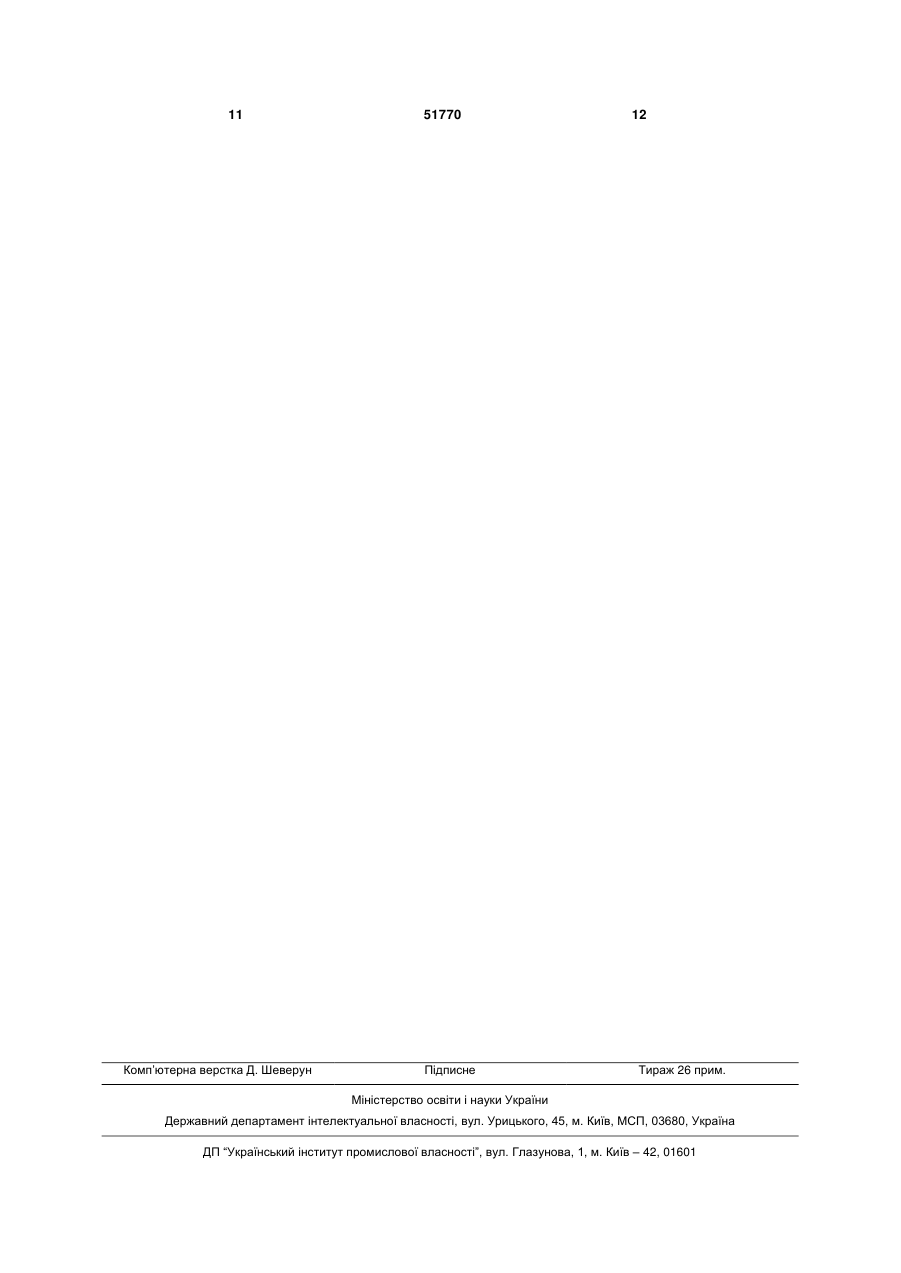
Пристрій обробки кутомісцевої інформації в фазовій моноімпульсній радіолокаційній станції, що містить послідовно з'єднані вузол обробки сигналів, блок першого фазометра і вузол оцінки параметрів кутомісцевої траєкторії у складі послідовно з'єднаних блока пам'яті, цифрового корелятора, блока оцінки параметрів кутомісцевої фази і блока фільтрації та перерахунку парамет 3 Поставлена задача вирішується за рахунок того, що в моноімпульсну систему з фазовим пеленгатором цілей, яка містить послідовно з'єднані вузол обробки сигналів, блок першого фазометра і вузол оцінки параметрів кутомісцевої траєкторії додатково введені послідовно з'єднані блок аналізу параметрів кутомісцевої траєкторії, блок корекції, блок фільтрації опорних точок фази, блок розрахунку параметрів балістичної траєкторії, блок аналізу достовірності та вузол оцінки похідних дальності у складі послідовно з'єднаних блока другого фазометра, блока корелятора та блока оцінки похідних дальності. Вихід блока фільтрації та перерахунку параметрів з'єднаний із входом блока аналізу параметрів кутомісцевої траєкторії, другими входами блока корекції та блока розрахунку параметрів балістичної траєкторії. Вхід блока другого фазометра з'єднаний із виходом вузла обробки сигналів. Вихід блока оцінки похідних дальності з'єднаний із другим входом блока аналізу достовірності. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у забезпеченні високої точності оцінки параметрів кутомісцевої траєкторії та похідних дальності за рахунок когерентної обробки послідовностей радіоімпульсів та усунення неоднозначності фазових вимірювань, використовуючи функціональні залежності між параметрами балістичної траєкторії цілі. На фіг. 1 приведена структурна схема запропонованого пристрою. На фіг. 2 показана залежність значень вимірювань кутомісцевої фази від кутового положення цілі в секторі огляду. На фіг. 3 приведені результати кореляційної обробки функції кутомісцевої фази. На фіг. 4 приведена типова функціональна залежність між параметрами балістичної траєкторії. Запропонований пристрій обробки кутомісцевої інформації в фазовій моноімпульсній радіолокаційній станції містить послідовно з'єднані вузол обробки сигналів 1, блок першого фазометра 2, вузол оцінки параметрів кутомісцевої траєкторії 3 у складі послідовно з'єднаних блока пам'яті 4, цифрового корелятора 5, блока оцінки параметрів кутомісцевої фази 6 і блока фільтрації та перерахунку параметрів 7, послідовно з'єднані блок аналізу параметрів кутомісцевої траєкторії 8, блок корекції 9, блок фільтрації опорних точок фази 10, блок розрахунку параметрів балістичної траєкторії 11, блок аналізу достовірності 12 та вузол оцінки похідних дальності 13 у складі послідовно з'єднаних блока другого фазометра 14, блока корелятора 15 і блока оцінки похідних дальності 16. Вихід блока фільтрації та перерахунку параметрів з'єднаний з входом блока аналізу параметрів кутомісцевої траєкторії, з другими входами блока корекції та блока розрахунку параметрів балістичної траєкторії. Вхід блока другого фазометра з'єднаний із другим виходом блока аналізу достовірності, входом пристрою є двоканальний вхід вузла обробки сигналів, а виходами пристрою - виходи блока аналізу достовірності та блока оцінки похідних дальності. 51770 4 Робота запропонованого пристрою полягає у наступному. На вхід вузла обробки сигналів по двом приймальним каналам надходять луна-сигнали від цілей. В цьому вузлі здійснюється підсилення та перетворення сигналів на проміжну частоту. Далі сигнали розподіляються по каналам вимірювання кута місця цілі та визначення похідних дальності. Інформація про кут місця цілі в г-ому циклі супроводу ξі міститься в різниці фаз сигналів, отриманих з верхнього та нижнього прийомних каналів ∆φі: 2 d sin i i , (1) де: d - відстань між верхньої та нижньої антенними структурами; λ - довжина хвилі; ξі - кут місця цілі відносно нормалі до розкриву антени; і=1, 2, 3 ... n. Вимірювання значень ∆φі здійснюється у блоці першого фазометру. Сектор огляду РЛС по куту місця повинен відповідати діапазону однозначності фазових вимірювань ∆φ0=2π. Наприклад, при λ=2 м, d = 6 м сектор однозначності вимірювань із (1) буде ∆ξ0=20°. Для кута нахилу розкриву антени в 20° сектор, в межах якого кут місця цілі вимірюється однозначно, (в сферичних координатах відносно лінії горизонту) відповідає: ∆γ0=20°, де ∆γmin=10°; ∆γmax=30°. (2) Внаслідок цього, а також через помилки фазових вимірювань на краях сектору огляду маємо неоднозначність виміру кута місця цілі. Виміри кутомісцевої фази ∆φі залежать від кута місця цілі в секторі огляду (фіг. 2). Для умов i 2 , що прикладу (2) при γц=5° вимір фази відповідає значенню оцінки кута місця цілі γi=25°, тобто з помилкою δγi=20°. У зв'язку з цим вторинна обробка інформації (фільтрація опорних точок кутомісцевої фази) з використанням звичайного фільтра Калмана буде неефективною, тому для оцінки параметрів кутомісцевої траєкторії використовується кореляційний метод обробки. Для цього виміри кутомісцевої фази ∆φі накопичуються за час супроводу цілі τс в блоці пам'яті 4. Параметрами отриманої функції фази ∆φі є постійна складова φ0 та кут нахилу φ: i 0 t i t 0 , (3) де: t0 - час прив'язки параметрів функції (звичайно відповідає середині інтервалу супроводу t0). Далі в цифровому кореляторі 5 отримана функція фази порівнюється з набором опорних (еталонних) функцій фази: j ti t0 ОПji . (4) Порівняння здійснюється шляхом обчислення значень кореляційного інтегралу ψi: j 1 n 2 n sin i 1 i 2 n cos ОПji i i 1 де: j=l, 2,...M; M - число опорних функцій фази. ОПji , (5) 5 51770 Параметр опорної функції фази в діапазоні: 2 2 ... c c , де: τc=tn-t1; τc - час супроводу цілі. j Дискретність зміни параметру n змінюється M ; M=2n; c T , де Т - період надходження опорних точок фази ∆φі. В блоці 6 визначаються оцінки параметрів куˆ ˆ томісцевої фази 0 та шляхом аналізу отриманих значень кореляційного інтегралу ψj. ˆ За оцінку приймається параметр к тієї (ктої) опорної функції фази φОПкі, при порівнянні з якою отримується максимальне значення кореляк max j ˆ j к. ційного інтегралу: , тобто ˆ0 Значення оцінки визначається як постійна складова функції фази ∆φі: n sin arctg ˆ к ti t0 cos ˆ0 i i ˆ к ti t0 к ti t0 i 1 n i 1 ОПкі , (6) де: . Далі коректуються значення параметрів опорних точок кутомісцевої фази (усунення можливих стрибків фази на 2π) на основі отриманої функції ˆ i ˆ 0 ˆ ti t0 фази : φі=∆φі+mi∙2π, (7) ˆi 1 mi E 2 2 де: ; Е[.] - ціла частина числа [.]. В блоці 7 отримані значення кутомісцевої фази φі перераховуються з використанням юстировочних коефіцієнтів в значення вимірів кута місця в сферичній системі координат γі: i i arcsin 0 i 2 d ; sin arcsin cos i i , (8) де: γ0 - кут нахилу розкриву антени РЛС (константа); i - азимут цілі відносно нормалі до розкриву антени. Отримані значення γі фільтруються із визначенням параметрів траєкторії кута місця цілі γі та i : 1 t 1 1 t i t 0 . (9) 6 В блоках 8, 9, 10, враховуючи можливість неоднозначності фазових вимірювань, формується додаткова кутомісцева траєкторія, параметри якої відрізняються від (9) на відстань відповідно інтервалу неоднозначності. Для цього в блоці 8 визначаються кути входу γн та виходу γк цілі на інтервалі супроводу (відповідно моментам часу t1 та tn): н 1 1 t i t 0 ; к 1 1 t n t 0 . В блоці 9 фазові вимірювання φі коректуються в припущенні їх неоднозначності: * i i , (10) де: ∆= 2π, коли [(γн < γmin + δ) (γк < γmin + δ)] (γ1 γmax - δ) (γк > γmax - δ)] (γ1 > γ0); 1 огл 0 2 ; δ - перекриття сектору однозначності ∆у0 сектором огляду ∆γогл на краях зони. В блоці 10 отримані опорні точки * i перера * i ховуються (8) в сферичні координати і фільтруються з визначенням параметрів кутомісцевої траєкторії γ2, 2 : 2 t 2 2 t i t 0 . (12) В блоках 11 і 12 аналізується достовірність траєкторії (9) та (12). Критерієм достовірності є ступінь співпадання значень радіального приско R2 R рення 1 і , які витікають із функціональних залежностей для параметрів балістичної траєктоˆ R рії (13) та точної оцінки 1 , отриманої у вузлі оцінки похідних дальності 13 [3]: R R 2 2 cos 2 R sin r3 , (13) де: R, , γ - відповідно дальність, азимут і кут місця цілі; , - похідні координат; μ - гравітаційна постійна; μ = 3,986∙105 км3/с2; ρ - радіус Землі, р = 6371 км; 2 r R2 R sin r - радіус-вектор цілі; . З використанням (13) в блоці 11 визначаються R R значення 1 і 2 , які відповідають параметрам 1 , 1 , і 2 , 2 . R1 1, 1 В блоці 12 отримані значення і R2 2, 2 порівнюються із величиною точної оцінˆ ки R : ˆ ˆ R2 R2 R R1 R1 R ; . Параметри , , які відповідають мінімальному розходженню прискорення, вважаються як більш достовірні і видаються на вихід пристрою ( 1 , 1 чи 2 , 2 ). 7 51770 Вузол оцінки похідних дальності 13 формує ˆ точні значення оцінки прискорення R . Для цього на інтервалі супроводження цілі призначається режим обробки когерентної послідовності h радіоімпульсів. В блоці другого фазометра 14 визначаються значення функції фази Фi яку можливо уявити як поліном 2-го ступеня: 1 Фi Ф 0 Ф t i t 0 Ф ti t0 2 2 . (15) Ф0 Ф Параметри функції фази , і Ф визначаються параметрами відповідно дальності R0, радіальної швидкості R та прискорення R траєкторії цілі: 4 1 Фi 2 ft зі R0 R ti t0 R ti t0 2 2 де: tзі - часова затримка луна-сигналів цілі в ітому такті; i = l, 2, 3...h. Обробка функції фази Фі із визначенням оцінок ˆ ˆ похідних дальності R і R здійснюється кореляційним методом. Для цього в блоці корелятора 15 обчислюється значення кореляційного інтегралу Qj як результат порівняння функції фази Фі із набором S опорних (еталонних) функцій фази ФОПji: j 1 h де: 2 h sin Ф i Ф ОПji i 1 2 h cos Ф i Ф опji i 1 Ф ОПji Фj 4 Фj 2 Rj Rj Ф j ti t0 1 Ф j ti 2 ; t0 8 Позитивний ефект, який дає використання запропонованого пристрою, полягає у тому, що когерентне накопичення за час супроводження цілі і обробка n опорних точок кутомісцевої фази забезпечує збільшення точності побудови параметрів кутомісцевої траєкторії. Середньоквадратична помилка (СКП) визначення цих параметрів складає [3, 4]: 3 2 d n ; ; ; j=1, 2.....s. ˆ ˆ За оцінку похідних дальності R і R приймаються параметри тієї (к-тої) опорної функції фази, при рівнянні з якою отримано максимальне значення кореляційного інтегралу Qmax: Q k max Q i ˆ ˆ R Rк R Rк j , тобто , . У блоці 12 отримане значення оцінки ЇІ використовується для вибору найбільш достовірних параметрів кутомісцевої траєкторії цілі. При технічній реалізації пропонованого пристрою доцільно використовувати типові вузли і блоки радіоелектронної апаратури, зокрема, інтегральні мікросхеми та мікропроцесори [2, 5]. Послідовність включення в роботу окремих блоків пристрою і порядок їх взаємодії визначається сіткою керуючих імпульсів синхронізатора РЛС (вузол синхронізації на схемі пристрою не показаний). dT n , де: , - СКП відповідно одиничних вимірювань фази та її похідної; Т - період надходження вимірювань. Наприклад, СКП оцінки параметра у зменшується в n разів. За рахунок усунення можливої неоднозначності фазових вимірювань значно зменшується ймовірність помилки, яка відповідає діапазону однозначності ∆γ0. Точність формування СКП оцінки радіального ˆ прискорення R , яка використовується для перевірки достовірності вимірювань кута місця складає [4]: 1,7 R 2 m 2 Tп , де: m - кількість сигналів в когерентній послідовності; Тп - період повторення зондуючих імпульсів. При m = 32, Тп = 40∙10-3с, λ = 2 м СКП оцінки 2 ; прискорення ˆ R 2 м с2 ˆ тобто отримана оцінка R є достатньо точною для перевірки і усунення неоднозначності оцінки кутомісцевих параметрів траєкторії цілі. ДЖЕРЕЛА ІНФОРМАЦІЇ: 1. Леонов А.И. Моноимпульсная радиолокация /А.И. Леонов, К.И. Фомичѐв. - М.: Радио и связь, 1984. - С. 13. 2. Пат. 62390А, Україна, МПК G01S 13/52. Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині /В.В. Челпанов, І.П. Вершинін, І.М. Дорошко; Заявник та патентовласник Харківський військовий університет - № 2003032243; заявл. 14.03.03; опубл. 15.12.03. Бюл. № 23. 3. Саврасов Ю.С. Алгоритмы и программы в радиолокации /Ю.С. Саврасов - М.: Радио и связь, 1985. - 216 с. 4. Обработка сигналов в многоканальных РЛС /под ред. А.П. Лукошкина. - М.: Радио и связь, 1983. - 323 с. 5. Цифровые и аналоговые интегральные микросхемы. Справочник. /под ред. С.В. Якубовского. - М.: Радио и связь, 1980. - 412 с. 9 51770 10 11 Комп’ютерна верстка Д. Шеверун 51770 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for processing information on angle of elevation at phase mono-pulse radar station
Автори англійськоюChelpanov Artem Volodymyrovych, Khmelevskyi Serhii Ivanovych, Kukobko Serhii Viktorovych, Rybalka Hryhorii Valeriiovych, Kolomiitsev Oleksii Volodymyrovych
Назва патенту російськоюУстройство обработки информации угол-места в фазовой моноимпульсной радиолокационной станции
Автори російськоюЧелпанов Артем Владимирович, Хмелевский Сергей Иванович, Кукобко Сергей Викторович, Рибалка Григорий Валерьевич, Коломийцев Алексей Владимирович
МПК / Мітки
МПК: G01S 13/52
Мітки: пристрій, моноімпульсний, фазовий, радіолокаційний, кутомісцевої, інформації, станції, обробки
Код посилання
<a href="https://ua.patents.su/6-51770-pristrijj-obrobki-kutomiscevo-informaci-v-fazovijj-monoimpulsnijj-radiolokacijjnijj-stanci.html" target="_blank" rel="follow" title="База патентів України">Пристрій обробки кутомісцевої інформації в фазовій моноімпульсній радіолокаційній станції</a>
Пристрій одноканального автопідстроювання частоти гетеродина в імпульсній радіолокаційній станції
Номер патенту: 14308
Опубліковано: 25.04.1997
Автори: Павлов Юрій Єфімович, Жарій Ігор Олександрович, Косінський Олексій Сергійович
МПК: H03L 7/00, H03L 7/08, G01S 13/34, G01S 13/00
Мітки: імпульсний, частоти, одноканального, гетеродина, радіолокаційний, пристрій, автопідстроювання, станції
Формула / Реферат:
Устройство для одноканальной автоподстройки частоты гетеродина в импульсной радиолокационной станции по авт. св. № 541258, отличающееся тем, что, с целью повышения точности слежения за несущей частотой зондирующего сигнала и увеличения динамического диапазона принимаемых сигналов, в него введен формирователь селекторных импульсов, вход и первый и второй выходы которого соединены соответственно с дополнительным выходом передающего...
Система керування функціональними режимами радіолокаційної станції
Номер патенту: 30978
Опубліковано: 25.03.2008
Автори: Вовк Олександр Іванович, Челпанов Артем Володимирович, Шматков Сергій Ігорович, Карлов Володимир Дмитрович
МПК: G01S 13/52
Мітки: радіолокаційної, система, керування, режимами, станції, функціональними
Формула / Реферат:
Система керування функціональними режимами радіолокаційної станції (РЛС), що містить вузол обробки інформації, вузол керування ресурсами РЛС та вузол керування режимом супроводу у складі послідовно включених блока класифікації, блока розподілу заявок на супровід цілей і блока оцінки потрібної енергії, яка відрізняється тим, що додатково введені: послідовно з'єднані блок оцінки інтенсивності потоку цілей і блок групування цілей, послідовно...
Пристрій критерійної обробки радіолокаційної інформації
Номер патенту: 37866
Опубліковано: 15.05.2003
Автори: Немчин Олександр Федорович, Мокеєв Юрій Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мирошниченко Михайло Іванович, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, МАЙ ІГОР ДМИТРОВИЧ, Падалко Віктор Григорович
МПК: G01S 13/00, G01S 13/526, G01S 7/40
Мітки: радіолокаційної, критерійної, інформації, обробки, пристрій
Формула / Реферат:
Пристрій критерійної обробки радіолокаційної інформації, який містить m блоків пам'яті та вирішувальний блок, який відрізняється тим, що він містить блок синхронізації з чотирма виходами, блок обнулення, вхід якого з'єднаний з першим виходом блока синхронізації, блок обробки, ланцюжок з m послідовно з'єднаних блоків пам'яті з об'єднаними між собою тактовими входами, підключеними до четвертого виходу блока синхронізації, вирішувальний блок...
Пристрій обробки сигналів радіолокаційної інформації
Номер патенту: 37865
Опубліковано: 15.05.2003
Автори: КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, Мирошниченко Михайло Іванович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Геннадійович, Падалко Віктор Григорович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, МАЙ ІГОР ДМИТРОВИЧ, Немчин Олександр Федорович
МПК: G01S 13/42, G01S 13/526, G01S 13/00
Мітки: інформації, сигналів, обробки, радіолокаційної, пристрій
Формула / Реферат:
1. Пристрій обробки сигналів радіолокаційної інформації, який містить блок накопичення та вирішувавльний блок, який відрізняється тим, що пристрій містить синхронізатор з чотирма виходами, блок обнулення, вхід якого з'єднаний з першим виходом синхронізатора, інформаційний вхід блока накопичення є входом пристрою, вхід обнулення з'єднаний з виходом блока обнулення, а тактовий вхід з'єднаний з другим виходом синхронізатора, блок обробки,...
Пристрій обробки радіолокаційної інформації
Номер патенту: 37867
Опубліковано: 15.05.2003
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович, Мокеєв Юрій Генадійович, Лаврентьєв Володимир Миколайович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Геннадійович, Мирошниченко Михайло Іванович, Падалко Віктор Григорович
МПК: G01S 13/526, G01S 13/00, G01S 7/40
Мітки: радіолокаційної, обробки, пристрій, інформації
Формула / Реферат:
1. Пристрій обробки радіолокаційної інформації, який містить q доплерівських фільтрових каналів з об'єднаними входами, що є входом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтрового каналу, лінію затримки з відводами, послідовно з’єднані схему порівняння і регістр затримки, порогову схему, вентильну схему, а також q-входову схему АБО і бінарний накопичувач, вихід якого є виходом пристрою,...
Попередній патент: Дренажно-розподільний пристрій
Наступний патент: Спосіб діагностики раку молочної залози
Випадковий патент: Спосіб лапароскопічної санації черевної порожнини