Модуль лінійного переміщення
Номер патенту: 68238
Опубліковано: 26.03.2012
Автори: Степаненко Олександр Олександрович, Кузнєцов Юрій Миколайович

Формула / Реферат
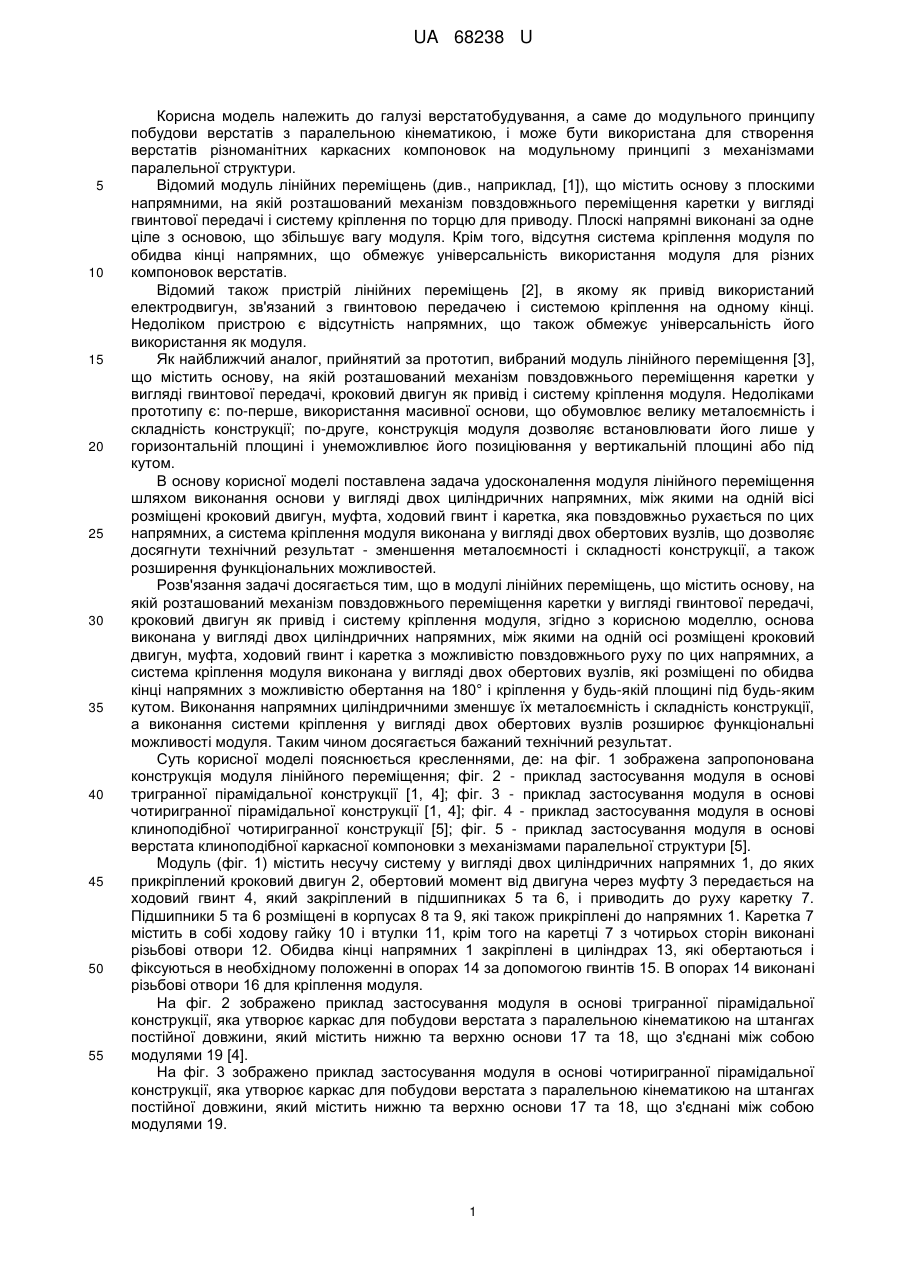
Модуль лінійного переміщення, що містить основу, на якій розташований механізм повздовжнього переміщення каретки у вигляді гвинтової передачі, кроковий двигун як привід і систему кріплення модуля, який відрізняється тим, що основа виконана у вигляді двох циліндричних напрямних, між якими на одній осі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних, а система кріплення модуля виконана у вигляді двох обертових вузлів, які розміщені по обидва кінці напрямних з можливістю обертання на кут 180° і кріплення у будь-якій площині під будь-яким кутом.
Текст
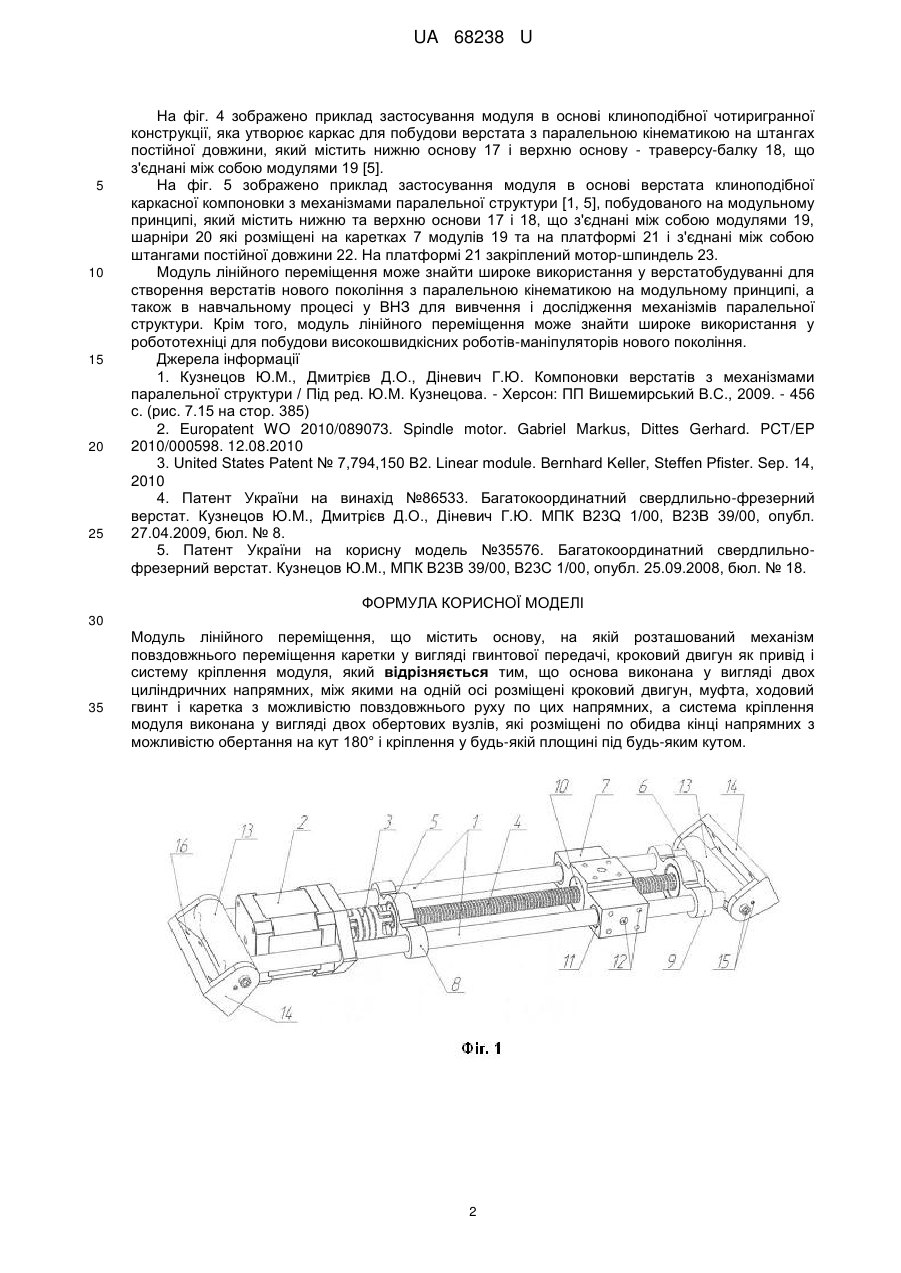
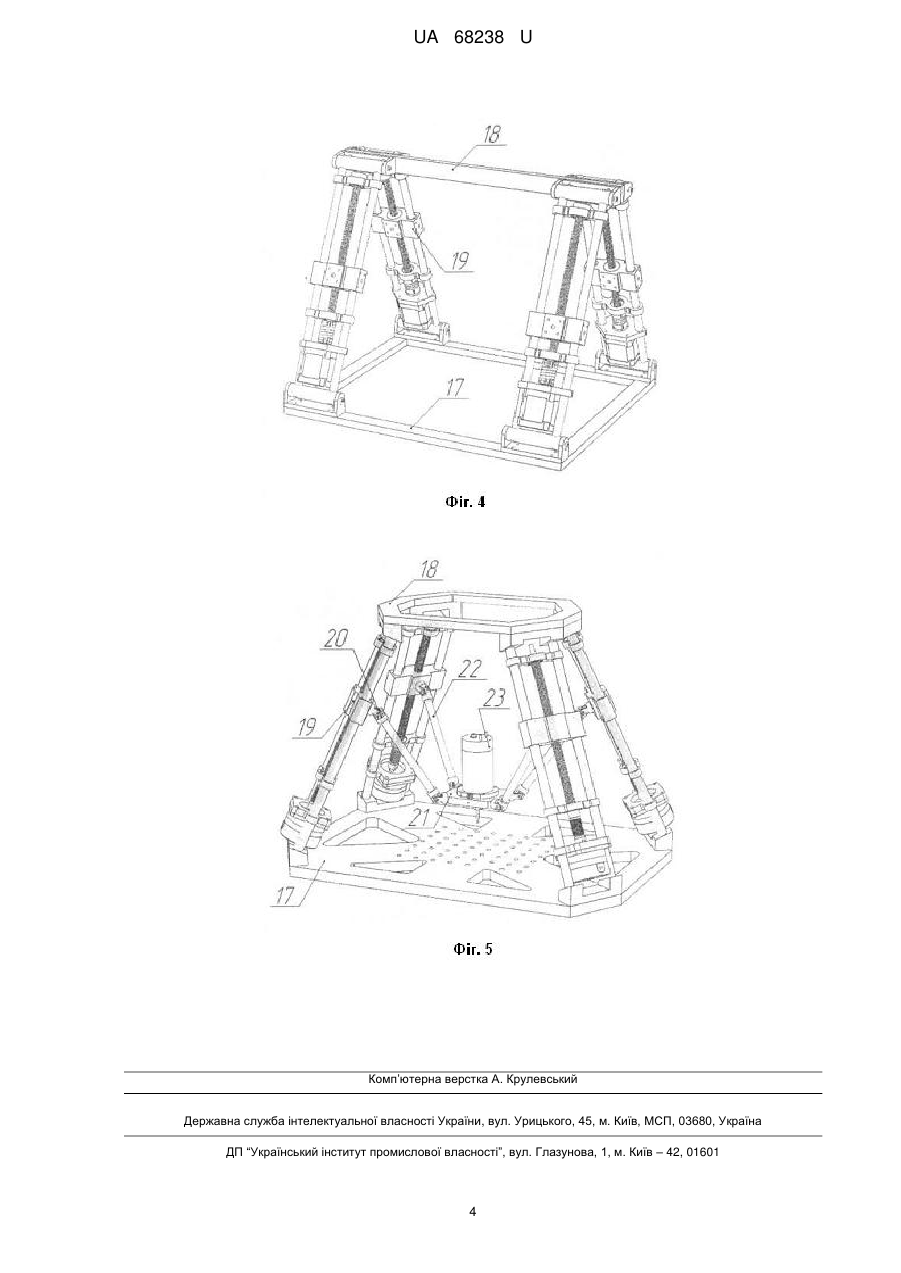
Реферат: Модуль лінійного переміщення містить основу, на якій розташований механізм повздовжнього переміщення каретки у вигляді гвинтової передачі, кроковий двигун як привід і систему кріплення модуля. Основа виконана у вигляді двох циліндричних напрямних, між якими на одній вісі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних. Система кріплення модуля виконана у вигляді двох обертових вузлів, які розміщені по обидва кінці напрямних з можливістю обертання на кут 180° і кріплення у будьякій площині під будь-яким кутом. UA 68238 U (12) UA 68238 U UA 68238 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі верстатобудування, а саме до модульного принципу побудови верстатів з паралельною кінематикою, і може бути використана для створення верстатів різноманітних каркасних компоновок на модульному принципі з механізмами паралельної структури. Відомий модуль лінійних переміщень (див., наприклад, [1]), що містить основу з плоскими напрямними, на якій розташований механізм повздовжнього переміщення каретки у вигляді гвинтової передачі і систему кріплення по торцю для приводу. Плоскі напрямні виконані за одне ціле з основою, що збільшує вагу модуля. Крім того, відсутня система кріплення модуля по обидва кінці напрямних, що обмежує універсальність використання модуля для різних компоновок верстатів. Відомий також пристрій лінійних переміщень [2], в якому як привід використаний електродвигун, зв'язаний з гвинтовою передачею і системою кріплення на одному кінці. Недоліком пристрою є відсутність напрямних, що також обмежує універсальність його використання як модуля. Як найближчий аналог, прийнятий за прототип, вибраний модуль лінійного переміщення [3], що містить основу, на якій розташований механізм повздовжнього переміщення каретки у вигляді гвинтової передачі, кроковий двигун як привід і систему кріплення модуля. Недоліками прототипу є: по-перше, використання масивної основи, що обумовлює велику металоємність і складність конструкції; по-друге, конструкція модуля дозволяє встановлювати його лише у горизонтальній площині і унеможливлює його позиціювання у вертикальній площині або під кутом. В основу корисної моделі поставлена задача удосконалення модуля лінійного переміщення шляхом виконання основи у вигляді двох циліндричних напрямних, між якими на одній вісі розміщені кроковий двигун, муфта, ходовий гвинт і каретка, яка повздовжньо рухається по цих напрямних, а система кріплення модуля виконана у вигляді двох обертових вузлів, що дозволяє досягнути технічний результат - зменшення металоємності і складності конструкції, а також розширення функціональних можливостей. Розв'язання задачі досягається тим, що в модулі лінійних переміщень, що містить основу, на якій розташований механізм повздовжнього переміщення каретки у вигляді гвинтової передачі, кроковий двигун як привід і систему кріплення модуля, згідно з корисною моделлю, основа виконана у вигляді двох циліндричних напрямних, між якими на одній осі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних, а система кріплення модуля виконана у вигляді двох обертових вузлів, які розміщені по обидва кінці напрямних з можливістю обертання на 180° і кріплення у будь-якій площині під будь-яким кутом. Виконання напрямних циліндричними зменшує їх металоємність і складність конструкції, а виконання системи кріплення у вигляді двох обертових вузлів розширює функціональні можливості модуля. Таким чином досягається бажаний технічний результат. Суть корисної моделі пояснюється кресленнями, де: на фіг. 1 зображена запропонована конструкція модуля лінійного переміщення; фіг. 2 - приклад застосування модуля в основі тригранної пірамідальної конструкції [1, 4]; фіг. 3 - приклад застосування модуля в основі чотиригранної пірамідальної конструкції [1, 4]; фіг. 4 - приклад застосування модуля в основі клиноподібної чотиригранної конструкції [5]; фіг. 5 - приклад застосування модуля в основі верстата клиноподібної каркасної компоновки з механізмами паралельної структури [5]. Модуль (фіг. 1) містить несучу систему у вигляді двох циліндричних напрямних 1, до яких прикріплений кроковий двигун 2, обертовий момент від двигуна через муфту 3 передається на ходовий гвинт 4, який закріплений в підшипниках 5 та 6, і приводить до руху каретку 7. Підшипники 5 та 6 розміщені в корпусах 8 та 9, які також прикріплені до напрямних 1. Каретка 7 містить в собі ходову гайку 10 і втулки 11, крім того на каретці 7 з чотирьох сторін виконані різьбові отвори 12. Обидва кінці напрямних 1 закріплені в циліндрах 13, які обертаються і фіксуються в необхідному положенні в опорах 14 за допомогою гвинтів 15. В опорах 14 виконані різьбові отвори 16 для кріплення модуля. На фіг. 2 зображено приклад застосування модуля в основі тригранної пірамідальної конструкції, яка утворює каркас для побудови верстата з паралельною кінематикою на штангах постійної довжини, який містить нижню та верхню основи 17 та 18, що з'єднані між собою модулями 19 [4]. На фіг. 3 зображено приклад застосування модуля в основі чотиригранної пірамідальної конструкції, яка утворює каркас для побудови верстата з паралельною кінематикою на штангах постійної довжини, який містить нижню та верхню основи 17 та 18, що з'єднані між собою модулями 19. 1 UA 68238 U 5 10 15 20 25 На фіг. 4 зображено приклад застосування модуля в основі клиноподібної чотиригранної конструкції, яка утворює каркас для побудови верстата з паралельною кінематикою на штангах постійної довжини, який містить нижню основу 17 і верхню основу - траверсу-балку 18, що з'єднані між собою модулями 19 [5]. На фіг. 5 зображено приклад застосування модуля в основі верстата клиноподібної каркасної компоновки з механізмами паралельної структури [1, 5], побудованого на модульному принципі, який містить нижню та верхню основи 17 і 18, що з'єднані між собою модулями 19, шарніри 20 які розміщені на каретках 7 модулів 19 та на платформі 21 і з'єднані між собою штангами постійної довжини 22. На платформі 21 закріплений мотор-шпиндель 23. Модуль лінійного переміщення може знайти широке використання у верстатобудуванні для створення верстатів нового покоління з паралельною кінематикою на модульному принципі, а також в навчальному процесі у ВНЗ для вивчення і дослідження механізмів паралельної структури. Крім того, модуль лінійного переміщення може знайти широке використання у робототехніці для побудови високошвидкісних роботів-маніпуляторів нового покоління. Джерела інформації 1. Кузнецов Ю.М., Дмитрієв Д.О., Діневич Г.Ю. Компоновки верстатів з механізмами паралельної структури / Під ред. Ю.М. Кузнецова. - Херсон: ПП Вишемирський B.C., 2009. - 456 с. (рис. 7.15 на стор. 385) 2. Europatent WO 2010/089073. Spindle motor. Gabriel Markus, Dittes Gerhard. PCT/EP 2010/000598. 12.08.2010 3. United States Patent № 7,794,150 B2. Linear module. Bernhard Keller, Steffen Pfister. Sep. 14, 2010 4. Патент України на винахід №86533. Багатокоординатний свердлильно-фрезерний верстат. Кузнецов Ю.М., Дмитрієв Д.О., Діневич Г.Ю. МПК B23Q 1/00, В23В 39/00, опубл. 27.04.2009, бюл. № 8. 5. Патент України на корисну модель №35576. Багатокоординатний свердлильнофрезерний верстат. Кузнецов Ю.М., МПК В23В 39/00, В23С 1/00, опубл. 25.09.2008, бюл. № 18. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Модуль лінійного переміщення, що містить основу, на якій розташований механізм повздовжнього переміщення каретки у вигляді гвинтової передачі, кроковий двигун як привід і систему кріплення модуля, який відрізняється тим, що основа виконана у вигляді двох циліндричних напрямних, між якими на одній осі розміщені кроковий двигун, муфта, ходовий гвинт і каретка з можливістю повздовжнього руху по цих напрямних, а система кріплення модуля виконана у вигляді двох обертових вузлів, які розміщені по обидва кінці напрямних з можливістю обертання на кут 180° і кріплення у будь-якій площині під будь-яким кутом. 2 UA 68238 U 3 UA 68238 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюModule of linear motion
Автори англійськоюKuznietsov Yurii Mykolaiovych, Stepanenko Oleksandr Oleksandrovych
Назва патенту російськоюМодуль линейного перемещения
Автори російськоюКузнецов Юрий Николаевич, Степаненко Александр Александрович
МПК / Мітки
Мітки: модуль, переміщення, лінійного
Код посилання
<a href="https://ua.patents.su/6-68238-modul-linijjnogo-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Модуль лінійного переміщення</a>
Датчик лінійного переміщення
Номер патенту: 61304
Опубліковано: 11.07.2011
Автори: Маренич Марина Володимирівна, Черепащук Григорій Олександрович
МПК: G01B 7/00
Мітки: переміщення, лінійного, датчик
Формула / Реферат:
Датчик лінійного переміщення, що містить дві котушки індуктивності, сердечник, що встановлений з можливістю руху вздовж осі котушок індуктивності, та пов'язаний з ним шток циліндричної форми, який відрізняється тим, що котушки індуктивності з'єднані послідовно та утворюють індуктивний півміст, кожна з них намотана на свою половину каркаса, містить дві трубки однакової довжини, які нерухомо закріплені в осьовому отворі сердечника, з одного...
Механізм лінійного переміщення пристрою для обслуговування дверей або рам коксових печей
Номер патенту: 77365
Опубліковано: 15.11.2006
Автори: Бондарєв Олександр Олександрович, Гетьман Володимир Миколайович
МПК: C10B 25/00
Мітки: коксових, лінійного, пристрою, обслуговування, рам, печей, переміщення, дверей, механізм
Формула / Реферат:
1. Механізм лінійного переміщення пристрою для обслуговування дверей або рам коксових печей, що містить вертикальну стійку, важільну систему, яка включає шарнірно закріплені за допомогою підвісок на вертикальній стійці спарені двоплечі важелі, і привід обертово-поступального переміщення, встановлений на вертикальній стійці, який відрізняється тим, що механізм додатково забезпечений кареткою, яка рухомо встановлена на вертикальній стійці і...
Пружно-демпферний модуль підвіски
Номер патенту: 77530
Опубліковано: 15.12.2006
Автор: Мельничук Сергій Володимирович
МПК: B60G 25/00
Мітки: пружно-демпферний, підвіски, модуль
Формула / Реферат:
Пружно-демпферний модуль підвіски, що містить чотириланковий важільний механізм (1), між верхнім (2) і нижнім (3) шарнірами якого закріплені пружний (6) та демпферний (7) елементи, паралельно розміщені та жорстко об'єднані в один модуль, а з бічними його шарнірами (4) та (5) жорстко зв'язані поздовжні горизонтальні напрямні (8) з можливістю поступального переміщення в підшипниках (9) кріплення (10) підресореної маси, кріплення (11)...
Гідравлічний механізм лінійного переміщення фізичного тіла

Номер патенту: 31442
Опубліковано: 15.12.2000
Автор: Романіка Костянтин Васильович
МПК: B23B 3/00
Мітки: гідравлічний, фізичного, механізм, переміщення, тіла, лінійного
Текст:
...напряму його пере ( міщений [ Поставлена мета досягається тим, ш вказаний клапон вике* 4 наний з можливість^ обертання навкруги своєї ©сі І має по періметру необмежену КІЛЬКІСТЬ отворів різного діаметру , рри цьоіцу на одНІй осі з клапоном установлений лімб розділений на КІЛЬКІСТЬ відрізків, що відповідають КІЛЬКОСТІ отворів в клалоні, а пдя зміни напряму руху супорта, паралельно з валиком, що звязаний з вагою, установлений допоміжний...
Демонстраційний модуль
Номер патенту: 43756
Опубліковано: 25.08.2009
Автор: Шатілло Вячеслав Вікторович
МПК: A47F 7/00
Мітки: демонстраційний, модуль
Формула / Реферат:
1. Демонстраційний модуль, що містить прозорий корпус, кришку, елемент фіксації кришки, який відрізняється тим, що демонстраційний модуль додатково містить вертикальний елемент кріплення демонстраційного модуля.2. Демонстраційний модуль за п. 1, який відрізняється тим, що вертикальний елемент кріплення демонстраційного модуля виконаний у вигляді гнучкого елемента.3. Демонстраційний модуль за п. 1, який відрізняється тим, що...
Попередній патент: Дихальний пристрій
Наступний патент: Спосіб моделювання гепатиту в експерименті
Випадковий патент: Присадибний вітроенергетичний комплекс омельченка в.я