Літальний апарат нехаєнко і спосіб керування літальним апаратом

Формула / Реферат
1. Літальний апарат, що включає каркас, силову установку, гнучке крило, несуча частина якого складається з кільової, бічних і поперечних балок, проводку керування, що забезпечує кінематичний зв'язок системи керування у вигляді штурвальної колонки з елементами керування літального апарата, який відрізняється тим, що проводка керування виконана з утворенням двох ланцюгів керування, передатні елементи яких складаються із двох гнучких елементів, наприклад, у вигляді тросової проводки керування і жорстких тяг керування, при цьому жорсткі тяги керування з'єднані між собою шарнірами і зв'язують шарнірно-закріплену штурвальну колонку з кільовою балкою гнучкого крила з можливістю зміни кута атаки крила, а гнучкі елементи одним кінцем діаметрально приєднані до бічної поверхні тіла обертання штурвала, вісь якого закріплена до штурвальної колонки, а іншим кінцем кожний гнучкий елемент приєднаний до відповідної поперечної балки гнучкого крила, взаємодіючої з бічною балкою, виконаною з можливістю зміни співвідношення площ напівкрил щодо поздовжньої осі літального апарата.
2. Спосіб керування літальним апаратом, що включає процес керування польотом у повітрі літального апарата, оснащеного системою керування у вигляді штурвальної колонки зі штурвалом і гнучким крилом з кільовою балкою і зв'язаними між собою бічними і поперечними балками, впливу системою керування на проводку керування і додання прямолінійного напрямку літальному апарату за рахунок симетричного розташування горизонтальних поверхонь напівкрил літального апарата щодо його поздовжньої осі і додання заданого напрямку руху за рахунок примусової асиметрії горизонтальних поверхонь напівкрил літального апарата щодо його поздовжньої осі в проекції на вертикальну і горизонтальну площини, який відрізняється тим, що систему керування виконують у вигляді кінематично зв'язаних між собою проводок керування, одну із яких виконують у вигляді двох гнучких передатних елементів, а іншу - у вигляді жорсткого передатного елемента із шарнірними зчленуваннями, при цьому жорсткий передатний елемент одним кінцем з'єднують із системою керування-штурвальною колонкою, а інший кінець - з кільовою балкою, за допомогою якої для додання потрібного напрямку польоту по тангажу змінюють кут атаки гнучкого крила, при цьому кінці гнучких передатних елементів з однієї сторони між собою з'єднують діаметрально на шківі штурвала, що розташовують на штурвальній колонці, а кожний інший кінець кожного гнучкого передатного елемента з'єднують із відповідною поперечною балкою гнучкого крила, при цьому зміною довжини гнучких передатних елементів впливають на системи: поперечні балки - бічні балки, за допомогою яких змінюють співвідношення площ напівкрил щодо поздовжньої осі літального апарата, при цьому одночасно збільшують кут атаки крила за рахунок впливу на кільову балку жорстким передатним елементом, у результаті чого заданий напрямок польоту в горизонтальній площині забезпечують у бік меншої площі напівкрила, причому керуючий вплив на твердий передатний елемент сполучають із одночасним керуючим впливом на гнучкі передатні елементи.
Текст
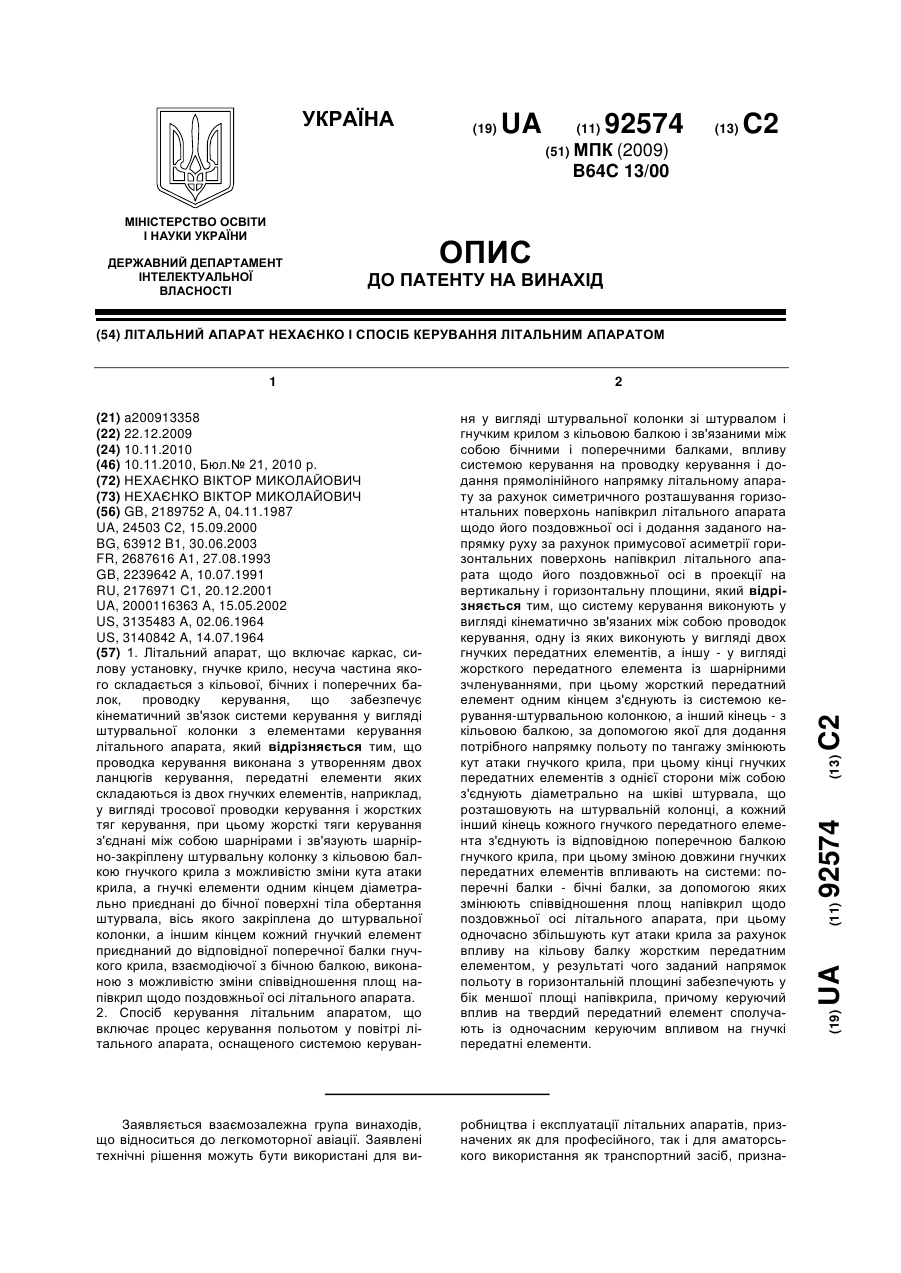
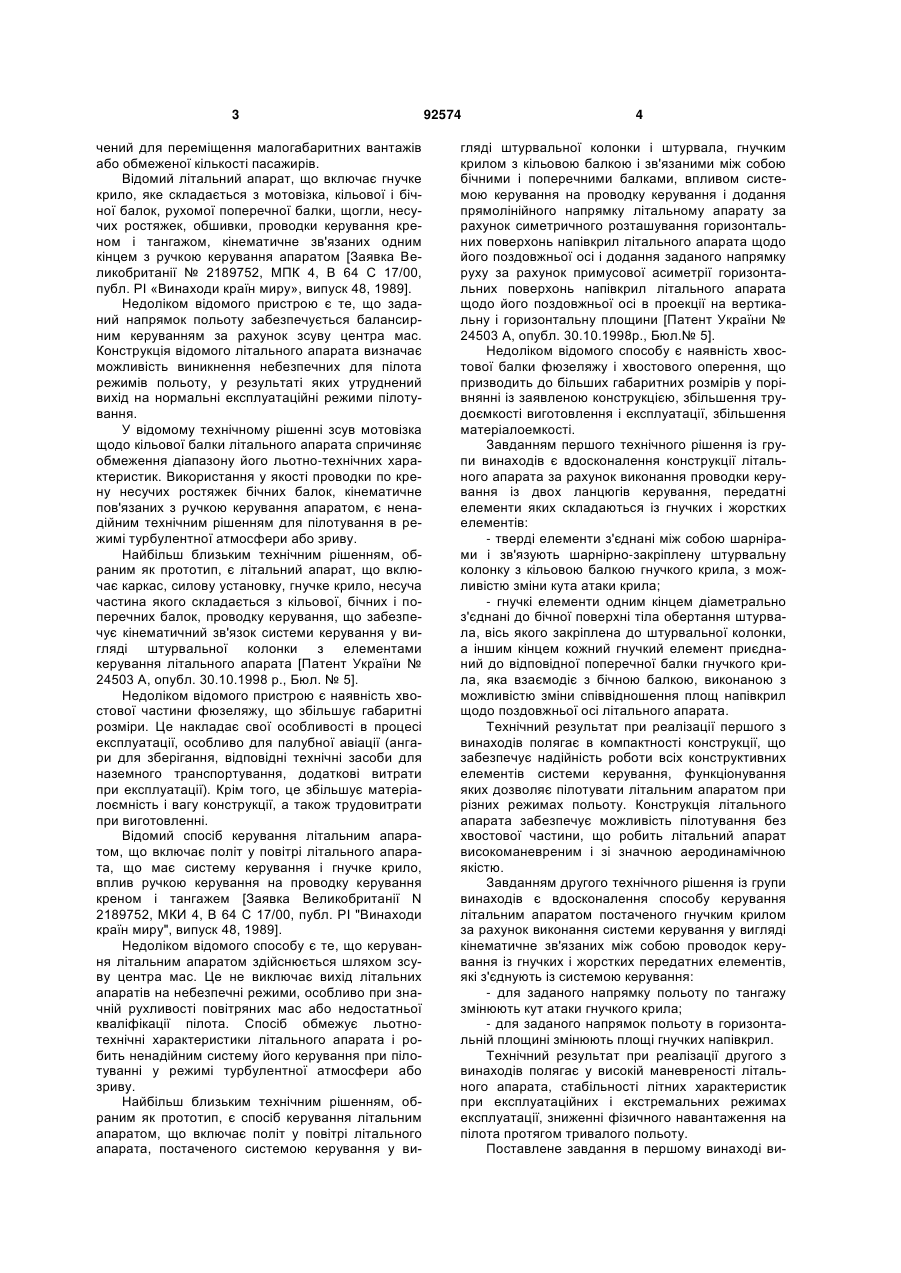
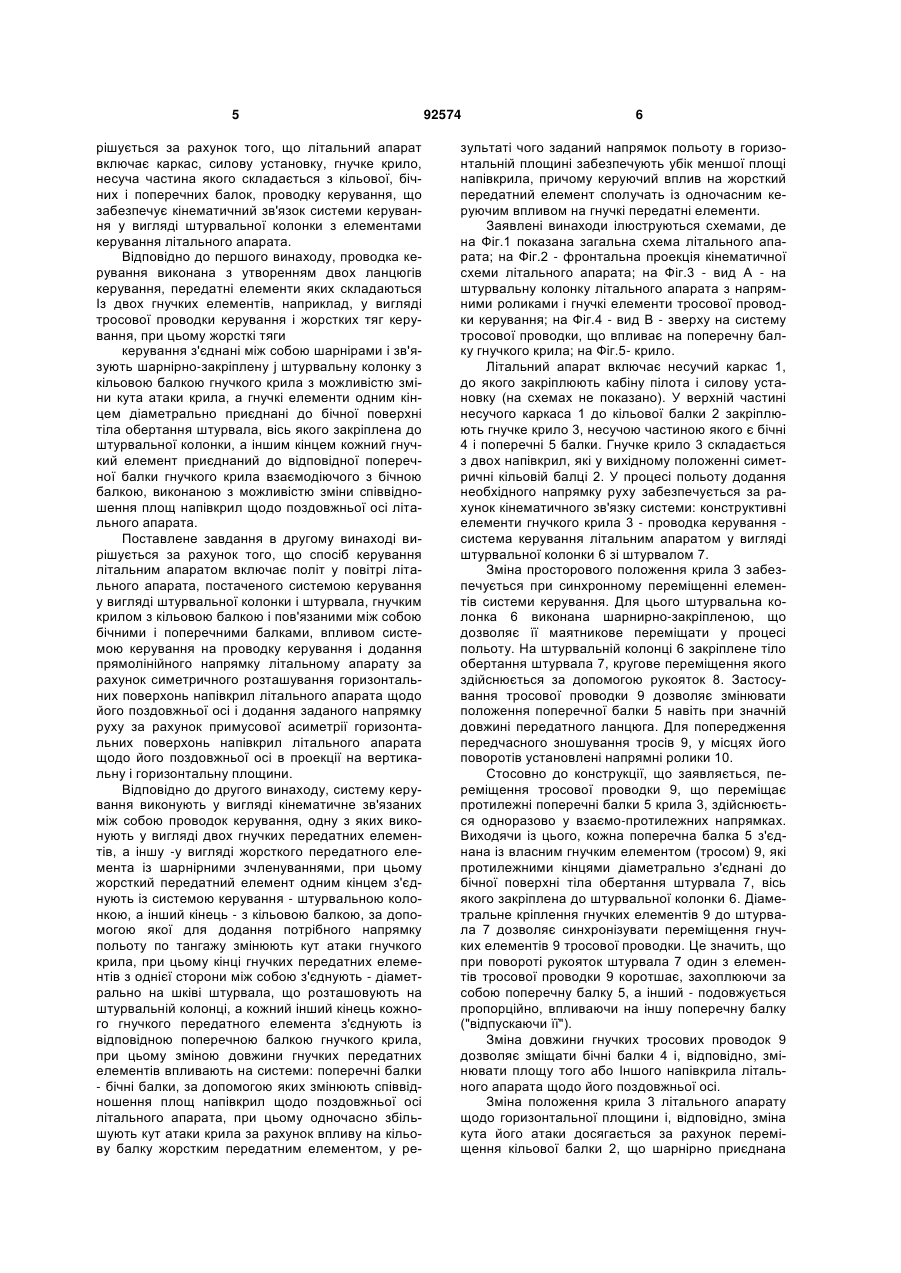
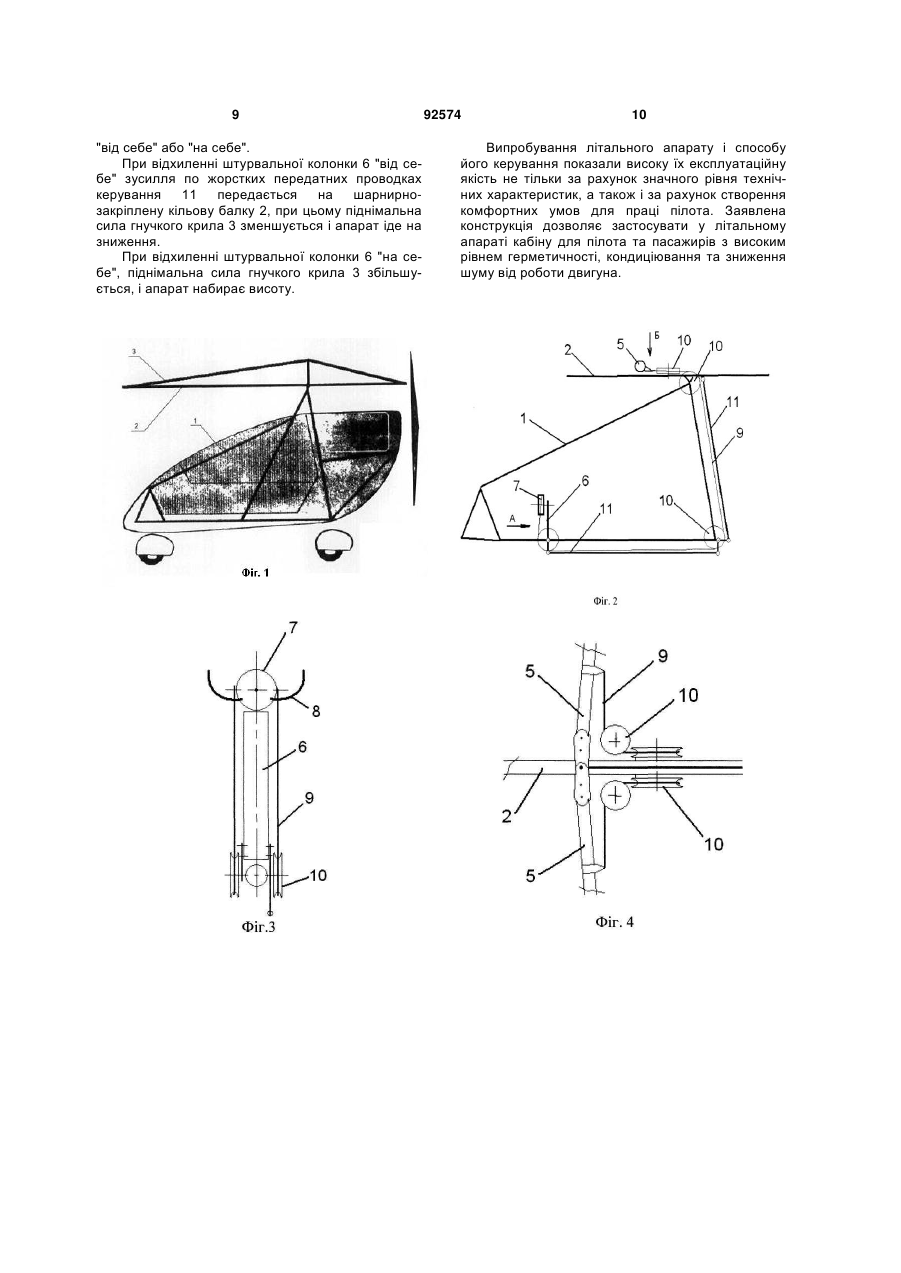
1. Літальний апарат, що включає каркас, силову установку, гнучке крило, несуча частина якого складається з кільової, бічних і поперечних балок, проводку керування, що забезпечує кінематичний зв'язок системи керування у вигляді штурвальної колонки з елементами керування літального апарата, який відрізняється тим, що проводка керування виконана з утворенням двох ланцюгів керування, передатні елементи яких складаються із двох гнучких елементів, наприклад, у вигляді тросової проводки керування і жорстких тяг керування, при цьому жорсткі тяги керування з'єднані між собою шарнірами і зв'язують шарнірно-закріплену штурвальну колонку з кільовою балкою гнучкого крила з можливістю зміни кута атаки крила, а гнучкі елементи одним кінцем діаметрально приєднані до бічної поверхні тіла обертання штурвала, вісь якого закріплена до штурвальної колонки, а іншим кінцем кожний гнучкий елемент приєднаний до відповідної поперечної балки гнучкого крила, взаємодіючої з бічною балкою, виконаною з можливістю зміни співвідношення площ напівкрил щодо поздовжньої осі літального апарата. 2. Спосіб керування літальним апаратом, що включає процес керування польотом у повітрі літального апарата, оснащеного системою керуван C2 2 (19) 1 3 чений для переміщення малогабаритних вантажів або обмеженої кількості пасажирів. Відомий літальний апарат, що включає гнучке крило, яке складається з мотовізка, кільової і бічної балок, рухомої поперечної балки, щогли, несучих ростяжек, обшивки, проводки керування креном і тангажом, кінематичне зв'язаних одним кінцем з ручкою керування апаратом [Заявка Великобританії № 2189752, МПК 4, В 64 С 17/00, публ. PI «Винаходи країн миру», випуск 48, 1989]. Недоліком відомого пристрою є те, що заданий напрямок польоту забезпечується балансирним керуванням за рахунок зсуву центра мас. Конструкція відомого літального апарата визначає можливість виникнення небезпечних для пілота режимів польоту, у результаті яких утруднений вихід на нормальні експлуатаційні режими пілотування. У відомому технічному рішенні зсув мотовізка щодо кільової балки літального апарата спричиняє обмеження діапазону його льотно-технічних характеристик. Використання у якості проводки по крену несучих ростяжек бічних балок, кінематичне пов'язаних з ручкою керування апаратом, є ненадійним технічним рішенням для пілотування в режимі турбулентної атмосфери або зриву. Найбільш близьким технічним рішенням, обраним як прототип, є літальний апарат, що включає каркас, силову установку, гнучке крило, несуча частина якого складається з кільової, бічних і поперечних балок, проводку керування, що забезпечує кінематичний зв'язок системи керування у вигляді штурвальної колонки з елементами керування літального апарата [Патент України № 24503 А, опубл. 30.10.1998 р., Бюл. № 5]. Недоліком відомого пристрою є наявність хвостової частини фюзеляжу, що збільшує габаритні розміри. Це накладає свої особливості в процесі експлуатації, особливо для палубної авіації (ангари для зберігання, відповідні технічні засоби для наземного транспортування, додаткові витрати при експлуатації). Крім того, це збільшує матеріалоємність і вагу конструкції, а також трудовитрати при виготовленні. Відомий спосіб керування літальним апаратом, що включає політ у повітрі літального апарата, що має систему керування і гнучке крило, вплив ручкою керування на проводку керування креном і тангажем [Заявка Великобританії N 2189752, МКИ 4, В 64 С 17/00, публ. PI "Винаходи країн миру", випуск 48, 1989]. Недоліком відомого способу є те, що керування літальним апаратом здійснюється шляхом зсуву центра мас. Це не виключає вихід літальних апаратів на небезпечні режими, особливо при значній рухливості повітряних мас або недостатньої кваліфікації пілота. Спосіб обмежує льотнотехнічні характеристики літального апарата і робить ненадійним систему його керування при пілотуванні у режимі турбулентної атмосфери або зриву. Найбільш близьким технічним рішенням, обраним як прототип, є спосіб керування літальним апаратом, що включає політ у повітрі літального апарата, постаченого системою керування у ви 92574 4 гляді штурвальної колонки і штурвала, гнучким крилом з кільовою балкою і зв'язаними між собою бічними і поперечними балками, впливом системою керування на проводку керування і додання прямолінійного напрямку літальному апарату за рахунок симетричного розташування горизонтальних поверхонь напівкрил літального апарата щодо його поздовжньої осі і додання заданого напрямку руху за рахунок примусової асиметрії горизонтальних поверхонь напівкрил літального апарата щодо його поздовжньої осі в проекції на вертикальну і горизонтальну площини [Патент України № 24503 А, опубл. 30.10.1998р., Бюл.№ 5]. Недоліком відомого способу є наявність хвостової балки фюзеляжу і хвостового оперення, що призводить до більших габаритних розмірів у порівнянні із заявленою конструкцією, збільшення трудоємкості виготовлення і експлуатації, збільшення матеріалоемкості. Завданням першого технічного рішення із групи винаходів є вдосконалення конструкції літального апарата за рахунок виконання проводки керування із двох ланцюгів керування, передатні елементи яких складаються із гнучких і жорстких елементів: - тверді елементи з'єднані між собою шарнірами і зв'язують шарнірно-закріплену штурвальну колонку з кільовою балкою гнучкого крила, з можливістю зміни кута атаки крила; - гнучкі елементи одним кінцем діаметрально з'єднані до бічної поверхні тіла обертання штурвала, вісь якого закріплена до штурвальної колонки, а іншим кінцем кожний гнучкий елемент приєднаний до відповідної поперечної балки гнучкого крила, яка взаємодіє з бічною балкою, виконаною з можливістю зміни співвідношення площ напівкрил щодо поздовжньої осі літального апарата. Технічний результат при реалізації першого з винаходів полягає в компактності конструкції, що забезпечує надійність роботи всіх конструктивних елементів системи керування, функціонування яких дозволяє пілотувати літальним апаратом при різних режимах польоту. Конструкція літального апарата забезпечує можливість пілотування без хвостової частини, що робить літальний апарат високоманевреним і зі значною аеродинамічною якістю. Завданням другого технічного рішення із групи винаходів є вдосконалення способу керування літальним апаратом постаченого гнучким крилом за рахунок виконання системи керування у вигляді кінематичне зв'язаних між собою проводок керування із гнучких і жорстких передатних елементів, які з'єднують із системою керування: - для заданого напрямку польоту по тангажу змінюють кут атаки гнучкого крила; - для заданого напрямок польоту в горизонтальній площині змінюють площі гнучких напівкрил. Технічний результат при реалізації другого з винаходів полягає у високій маневреності літального апарата, стабільності літних характеристик при експлуатаційних і екстремальних режимах експлуатації, зниженні фізичного навантаження на пілота протягом тривалого польоту. Поставлене завдання в першому винаході ви 5 рішується за рахунок того, що літальний апарат включає каркас, силову установку, гнучке крило, несуча частина якого складається з кільової, бічних і поперечних балок, проводку керування, що забезпечує кінематичний зв'язок системи керування у вигляді штурвальної колонки з елементами керування літального апарата. Відповідно до першого винаходу, проводка керування виконана з утворенням двох ланцюгів керування, передатні елементи яких складаються Із двох гнучких елементів, наприклад, у вигляді тросової проводки керування і жорстких тяг керування, при цьому жорсткі тяги керування з'єднані між собою шарнірами і зв'язують шарнірно-закріплену j штурвальну колонку з кільовою балкою гнучкого крила з можливістю зміни кута атаки крила, а гнучкі елементи одним кінцем діаметрально приєднані до бічної поверхні тіла обертання штурвала, вісь якого закріплена до штурвальної колонки, а іншим кінцем кожний гнучкий елемент приєднаний до відповідної поперечної балки гнучкого крила взаємодіючого з бічною балкою, виконаною з можливістю зміни співвідношення площ напівкрил щодо поздовжньої осі літального апарата. Поставлене завдання в другому винаході вирішується за рахунок того, що спосіб керування літальним апаратом включає політ у повітрі літального апарата, постаченого системою керування у вигляді штурвальної колонки і штурвала, гнучким крилом з кільовою балкою і пов'язаними між собою бічними і поперечними балками, впливом системою керування на проводку керування і додання прямолінійного напрямку літальному апарату за рахунок симетричного розташування горизонтальних поверхонь напівкрил літального апарата щодо його поздовжньої осі і додання заданого напрямку руху за рахунок примусової асиметрії горизонтальних поверхонь напівкрил літального апарата щодо його поздовжньої осі в проекції на вертикальну і горизонтальну площини. Відповідно до другого винаходу, систему керування виконують у вигляді кінематичне зв'язаних між собою проводок керування, одну з яких виконують у вигляді двох гнучких передатних елементів, а іншу -у вигляді жорсткого передатного елемента із шарнірними зчленуваннями, при цьому жорсткий передатний елемент одним кінцем з'єднують із системою керування - штурвальною колонкою, а інший кінець - з кільовою балкою, за допомогою якої для додання потрібного напрямку польоту по тангажу змінюють кут атаки гнучкого крила, при цьому кінці гнучких передатних елементів з однієї сторони між собою з'єднують - діаметрально на шківі штурвала, що розташовують на штурвальній колонці, а кожний інший кінець кожного гнучкого передатного елемента з'єднують із відповідною поперечною балкою гнучкого крила, при цьому зміною довжини гнучких передатних елементів впливають на системи: поперечні балки - бічні балки, за допомогою яких змінюють співвідношення площ напівкрил щодо поздовжньої осі літального апарата, при цьому одночасно збільшують кут атаки крила за рахунок впливу на кільову балку жорстким передатним елементом, у ре 92574 6 зультаті чого заданий напрямок польоту в горизонтальній площині забезпечують убік меншої площі напівкрила, причому керуючий вплив на жорсткий передатний елемент сполучать із одночасним керуючим впливом на гнучкі передатні елементи. Заявлені винаходи ілюструються схемами, де на Фіг.1 показана загальна схема літального апарата; на Фіг.2 - фронтальна проекція кінематичної схеми літального апарата; на Фіг.3 - вид А - на штурвальну колонку літального апарата з напрямними роликами і гнучкі елементи тросової проводки керування; на Фіг.4 - вид В - зверху на систему тросової проводки, що впливає на поперечну балку гнучкого крила; на Фіг.5- крило. Літальний апарат включає несучий каркас 1, до якого закріплюють кабіну пілота і силову установку (на схемах не показано). У верхній частині несучого каркаса 1 до кільової балки 2 закріплюють гнучке крило 3, несучою частиною якого є бічні 4 і поперечні 5 балки. Гнучке крило 3 складається з двох напівкрил, які у вихідному положенні симетричні кільовій балці 2. У процесі польоту додання необхідного напрямку руху забезпечується за рахунок кінематичного зв'язку системи: конструктивні елементи гнучкого крила 3 - проводка керування система керування літальним апаратом у вигляді штурвальної колонки 6 зі штурвалом 7. Зміна просторового положення крила 3 забезпечується при синхронному переміщенні елементів системи керування. Для цього штурвальна колонка 6 виконана шарнирно-закріпленою, що дозволяє її маятникове переміщати у процесі польоту. На штурвальній колонці 6 закріплене тіло обертання штурвала 7, кругове переміщення якого здійснюється за допомогою рукояток 8. Застосування тросової проводки 9 дозволяє змінювати положення поперечної балки 5 навіть при значній довжині передатного ланцюга. Для попередження передчасного зношування тросів 9, у місцях його поворотів установлені напрямні ролики 10. Стосовно до конструкції, що заявляється, переміщення тросової проводки 9, що переміщає протилежні поперечні балки 5 крила 3, здійснюється одноразово у взаємо-протилежних напрямках. Виходячи із цього, кожна поперечна балка 5 з'єднана із власним гнучким елементом (тросом) 9, які протилежними кінцями діаметрально з'єднані до бічної поверхні тіла обертання штурвала 7, вісь якого закріплена до штурвальної колонки 6. Діаметральне кріплення гнучких елементів 9 до штурвала 7 дозволяє синхронізувати переміщення гнучких елементів 9 тросової проводки. Це значить, що при повороті рукояток штурвала 7 один з елементів тросової проводки 9 коротшає, захоплюючи за собою поперечну балку 5, а інший - подовжується пропорційно, впливаючи на іншу поперечну балку ("відпускаючи її"). Зміна довжини гнучких тросових проводок 9 дозволяє зміщати бічні балки 4 і, відповідно, змінювати площу того або Іншого напівкрила літального апарата щодо його поздовжньої осі. Зміна положення крила 3 літального апарату щодо горизонтальної площини і, відповідно, зміна кута його атаки досягається за рахунок переміщення кільової балки 2, що шарнірно приєднана 7 до несучого каркаса 1 літального апарата. Проводка керування із жорстких елементів тяг керування виконана шарнірно зчленованою. Один кінець жорсткої проводки 11 шарнірно приєднаний до кільової балки 2, а інший - до рухомої штурвальної колонки 6, Зворотнопоступальне переміщення штурвальної колонки 6 в ту або іншу сторону з високою точністю і пропорційністю змінює кут атаки крила 3. Особливістю конструкції літального апарата є те, що система керування дозволяє компенсувати небажані зсуви гнучких проводок 9 керування при зворотно-поступальному переміщенні штурвальної колонки 6. Це досягається за рахунок того, що співвісно шарніру штурвальної колонки 6 установлені напрямні ролики 10 гнучких проводок керування 9. Такі ж по діаметру напрямні ролики встановлюються на осі обертання крила 3, у результаті чого відбувається зміна кута атаки крила 3. Ця умова дозволяє, при зміні положення штурвальної колонки 6 по тангажу, проводці керування по крені зберігати постійною свою довжину. А саме: скільки довжини троса намотується (змотується) на ролики, що перебувають на осі штурвальної колонки, стільки ж при цьому змотується (намотується) з роликів, що перебувають на осі обертання крила відповідно. Керування літальним апаратом у польоті здійснюється за допомогою системи керування: штурвальна колонка 6 зі штурвалом 7 - проводка керування 9 - гнучке крило 3 з кільовою балкою 2 і зв'язаними між собою бічними 4 і поперечними 5 балками. У процесі польоту системою керування надають прямолінійний напрямок літальному апарату за рахунок симетричного розташування горизонтальних поверхонь напівкрил літального апарата щодо його поздовжньої осі. Заданий напрямок руху по крені забезпечують за рахунок примусової асиметрії горизонтальних поверхонь напівкрил літального апарата щодо його поздовжньої осі в проекції на вертикальну і горизонтальну площини. У цілому, зміна напряму руху літального апарата по крені і тангажу досягається за рахунок того, що систему керування виконують у вигляді кінематичне зв'язаних між собою проводок керування, одну з яких виконують у вигляді двох гнучких передатних елементів 9, а іншу - у вигляді жорсткого передатного елемента 11 із шарнірними зчленуваннями. Для додання потрібного напрямку польоту по тангажу змінюють кут атаки гнучкого крила 3. Це досягається тим, що переміщають штурвальну колонку 6 і жорстким передатним елементом 11 впливають на кільову балку 2. Кільова балка 2 змінює кут атаки, і літальний апарат іде на зниження або набирає висоту. Для польоту літального апарата по крені змінюють співвідношення площ напівкрил щодо поздовжньої осі літального апарата, при цьому одночасно збільшують кут атаки крила 3 за рахунок впливу за допомогою штурвальної колонки 6 твердим передатним елементом 11 на кільову балку 2. Зміна співвідношення площ напівкрил забезпечують за рахунок того, що кінці гнучких передатних 92574 8 елементів 9 з однієї сторони між собою з'єднують діаметрально на шківі штурвала 7, що розташовують на штурвальній колонці 6, а кожний інший кінець кожного гнучкого передатного елемента 9 з'єднують із відповідною поперечною балкою гнучкого крила 5. Зміною довжини гнучких передатних елементів 9 впливають на системи: поперечні балки 5 - бічні балки 4, за допомогою яких заданий напрямок польоту в горизонтальній площині забезпечують убік меншої площі напівкрила. Для забезпечення працездатності системи керування необхідне виконання: - умови відповідності кута відхилення штурвальної колонки 6 до кута відхилення кільової балки 2 з відношенням 1:1; - умови рівних діаметрів роликів 10 тросової проводки, установлених на осі обертання штурвальної колонки 6 і на осі обертання кільової балки 2. При цьому, при переміщенні штурвальної колонки 6 назад (збільшення кута атаки), певна гнучка тросова проводка 9 (керування по крені) намотується на ролики 10, що перебувають на осі обертання штурвальної колонки 6, при цьому кільова балка 2 за цей же час повернулася щодо своєї осі на величину збільшення кута атаки, і така ж певна частина троса (керування по крені) змотується із роликів 10, що перебувають на осі обертання кільовий балки 2.1 навпаки, при переміщенні штурвальної колонки 6 уперед (на зменшення кута атаки), певна довжина гнучкої тросової проводки 9 (керування по кренів змотується із роликів 10, що перебувають на осі обертання штурвальної колонки 6, при цьому кільова балка 2 за цей же час повернулася щодо своєї осі на зменшення кута атаки і певна частина троса (керування по крені) намотується на ролики 10, що перебувають на осі обертання кільової балки 2. Загальна довжина тросової проводки 9 залишається незмінною, чим і забезпечується працездатність системи керування. При прямолінійному пілотуванні штурвальна колонка 6 і штурвал 7 перебувають у нейтральному положенні. Бічні 4 і поперечні 5 балки симетричні кільовій балці 2, при цьому, площа поверхні лівого напівкрила дорівнює площі поверхні правого напівкрила. Керування літальним апаратом по крені здійснюється поворотом штурвала 7 "уліво" або "вправо". При крені "уліво" у гілках тросової проводки керування 9 виникає різниця зусиль, яка через рухливі ролики 10 передається рухливим поперечним балкам 5. Поперечна балка 5, зміщаючись "вправо", захоплює за собою бічну балку 4. Ліва бічна балка зміщається щодо шарніра убік кільової балки, а права бічна балка - від неї. У результаті цього, площа лівого напівкрила зменшується, а правого -збільшується. За рахунок різниці величин піднімальних сил напівкрил виникає крутний момент, що забезпечує крен апарата "уліво". Для створення правого крену штурвал 7 повертають "вправо" і крен літального апарата досягається аналогічно вищевикладеному. Керування літальним апаратом по тангажу здійснюється відхиленням штурвальної колонки 6 9 "від себе" або "на себе". При відхиленні штурвальної колонки 6 "від себе" зусилля по жорстких передатних проводках керування 11 передається на шарнирнозакріплену кільову балку 2, при цьому піднімальна сила гнучкого крила 3 зменшується і апарат іде на зниження. При відхиленні штурвальної колонки 6 "на себе", піднімальна сила гнучкого крила 3 збільшується, і апарат набирає висоту. 92574 10 Випробування літального апарату і способу його керування показали високу їх експлуатаційну якість не тільки за рахунок значного рівня технічних характеристик, а також і за рахунок створення комфортних умов для праці пілота. Заявлена конструкція дозволяє застосувати у літальному апараті кабіну для пілота та пасажирів з високим рівнем герметичності, кондиціювання та зниження шуму від роботи двигуна. 11 Комп’ютерна верстка А. Крижанівський 92574 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAircraft of nekhaienko and method of aircraft control
Автори англійськоюNekhaienko Viktor Mykolaiovych
Назва патенту російськоюЛетательный аппарат нехаенко и способ управления летательным аппаратом
Автори російськоюНехаенко Виктор Николаевич
МПК / Мітки
МПК: B64C 13/00
Мітки: керування, літальний, спосіб, апарат, літальним, апаратом, нехаєнко
Код посилання
<a href="https://ua.patents.su/6-92574-litalnijj-aparat-nekhaehnko-i-sposib-keruvannya-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Літальний апарат нехаєнко і спосіб керування літальним апаратом</a>
Літальний апарат і спосіб керування літальним апаратом
Номер патенту: 26662
Опубліковано: 12.11.1999
Автори: Сайкон Джеймс Пітер, Розен Кеннет Мартін, Вайт Ендрю Крофорд
МПК: B64C 29/00
Мітки: керування, спосіб, апарат, літальний, літальним, апаратом
Формула / Реферат:
1. Летательный аппарат, содержащий тороидальный фюзеляж, концентричный относительно оси, два вращающихся в противоположные стороны несущих винта, расположенных внутри канала винтов, определенного указанным тороидальным фюзеляжем для вращения вокруг оси вращения, которая совпадает с осью фюзеляжа, и средства для полного управления перемещением летательного аппарата по высоте, тангажу, крену и рысканью как при зависании, так и при движении...
Відмовостійка система керування літальним апаратом
Номер патенту: 36472
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G05D 1/10
Мітки: літальним, система, керування, апаратом, відмовостійка
Формула / Реферат:
Відмовостійка система керування літальним апаратом, що має аналого-цифровий перетворювач, бортову обчислювальну машину, цифро-аналоговий перетворювач, причому виходи аналого-цифрового перетворювача з'єднані з входами бортової цифрової обчислювальної машини, виходи якої з'єднані з входами цифро-аналогового перетворювача об'єкта керування, яка відрізняється тим, що містить блок відмовостійких сервоприводів, блок відмовостійких давачів, причому...
Спосіб керування обертовим літальним апаратом
Номер патенту: 64670
Опубліковано: 25.02.2008
Автори: Немчин Олександр Федорович, Семенов Леонід Антонович, Коростельов Олег Петрович, Яковенко Петро Олексійович, Косовенко Євген Вікторович, Доценко Борис Іванович, Максимов Сергій Володимирович, Яковлев Віталій Васильович, Коробов Віталій Ілліч, Кузьмін В'ячеслав Павлович
Мітки: літальним, керування, апаратом, спосіб, обертовим
Формула / Реферат:
Спосіб керування по тангажу і рисканню, що включає примусове обертання літального апарата (ЛА) навколо поздовжньої осі з необхідною частотою за рахунок заданого кута установки консолей крила, приймання і перетворення модульованого лазерного випромінювання в сигнали керування, пропорційні відхиленню ЛА від центральної лінії лазерного променя, і подачу сигналів на слідкувальні електричні рульові приводи, що мають пружинний імітатор додаткового...
Система керування літальним апаратом
Номер патенту: 36519
Опубліковано: 27.10.2008
Автори: Полторацька Маргарита Миколаївна, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: система, літальним, апаратом, керування
Формула / Реферат:
Система керування літальним апаратом, що містить важіль керування, завантажувальну пружину, датчик кутового положення важеля керування, обчислювач, сервопривід керма висоти, кермо висоти, датчик кута тангажа, датчик кутової швидкості та датчик кутового прискорення літального апарата, перший диференціюючий пристрій, другий диференціюючий пристрій, яка відрізняється тим, що до її складу введені перший аналого-цифровий перетворювач, вхід якого...
Система керування безпілотним літальним апаратом
Номер патенту: 54022
Опубліковано: 25.10.2010
Автори: Симонов Володимир Федорович, Назарова Анастасія Олександрівна, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: безпілотним, керування, система, апаратом, літальним
Формула / Реферат:
Система керування безпілотним літальним апаратом, що складається з послідовно з'єднаних підсилювача, рульової машини, керма висоти, безпілотного літального апарата, а також пристрою зворотного зв'язку, вхід якого з'єднаний з першим виходом рульової машини, швидкісного гіроскопа, вхід якого з'єднаний з виходом безпілотного літального апарата, гіровертикалі, вхід якої з'єднаний з виходом безпілотного літального апарата, висотоміра, вхід якого...
Попередній патент: Пристрій для сухого гасіння коксу
Наступний патент: Спосіб муфтового ремонту трубопроводу (варіанти)
Випадковий патент: Спосіб профілактики карієсу постійних зубів у дітей