Система завантаження важеля керування авіаційного тренажера
Номер патенту: 96064
Опубліковано: 26.09.2011
Автори: Кушнір Богдан Йосипович, Харчишин Богдан Михайлович, Чайковський Роман Іванович, Снітков Ігор Філатович, Слободян Ігор Станіславович, Кожан Михайло Ярославович, Мачоган Юрій Васильович
Формула / Реферат
1. Система завантаження важеля керування авіаційного тренажера, що містить обчислювальний пристрій, механічно з'єднаний з важелем керування, датчик положення, вихід якого з'єднаний з входом обчислювального пристрою, завантажувальний пристрій з силовим електроприводом, яка відрізняється тим, що силовий електропривід виконаний у вигляді лінійного електромагнітного формувача зусилля, шток якоря якого з'єднаний з важелем керування через додатково введений датчик зусилля, вихід якого з'єднаний з першим входом обчислювального пристрою, крім цього, до складу завантажувального пристрою додатково введений двополярний регулятор напруги, вихід якого з'єднаний з входом силового електроприводу, а його вхід - з виходом обчислювального пристрою, при цьому параметри напруги на вході силового електроприводу відповідають виразу:
 , (1)
, (1)
де:
![]() - напруга на вході силового електроприводу;
- напруга на вході силового електроприводу;
![]() - нормувальні коефіцієнти;
- нормувальні коефіцієнти;
![]() - розраховане обчислювальним пристроєм значення завантаження важеля керування в залежності від його положення і параметрів польоту, в функції часу;
- розраховане обчислювальним пристроєм значення завантаження важеля керування в залежності від його положення і параметрів польоту, в функції часу;
![]() - значення зусилля, яке створює на своєму валу силовий електропривід, виміряне датчиком зусилля, в функції часу.
- значення зусилля, яке створює на своєму валу силовий електропривід, виміряне датчиком зусилля, в функції часу.
2. Система завантаження важеля керування авіаційного тренажера за п. 1, яка відрізняється тим, що завантажувальний пристрій додатково містить датчик струму, який підключений між виходом двополярного регулятора напруги та входом силового електроприводу, а його вихід з'єднаний з третім входом обчислювального пристрою, при цьому величина напруги на вході силового електроприводу визначається такою залежністю:
 , (2)
, (2)
де:
![]() - напруга на вході силового електроприводу;
- напруга на вході силового електроприводу;
![]() - нормувальні коефіцієнти;
- нормувальні коефіцієнти;
![]() - розраховане обчислювальним пристроєм значення завантаження важеля керування в залежності від його положення і параметрів польоту, в функції часу;
- розраховане обчислювальним пристроєм значення завантаження важеля керування в залежності від його положення і параметрів польоту, в функції часу;
![]() - значення зусилля, яке створює на своєму валу силовий електропривід, виміряне датчиком зусилля, в функції часу;
- значення зусилля, яке створює на своєму валу силовий електропривід, виміряне датчиком зусилля, в функції часу;
![]() - величина струму силового електроприводу, в функції часу;
- величина струму силового електроприводу, в функції часу;
![]() - символ диференціювання.
- символ диференціювання.
Текст
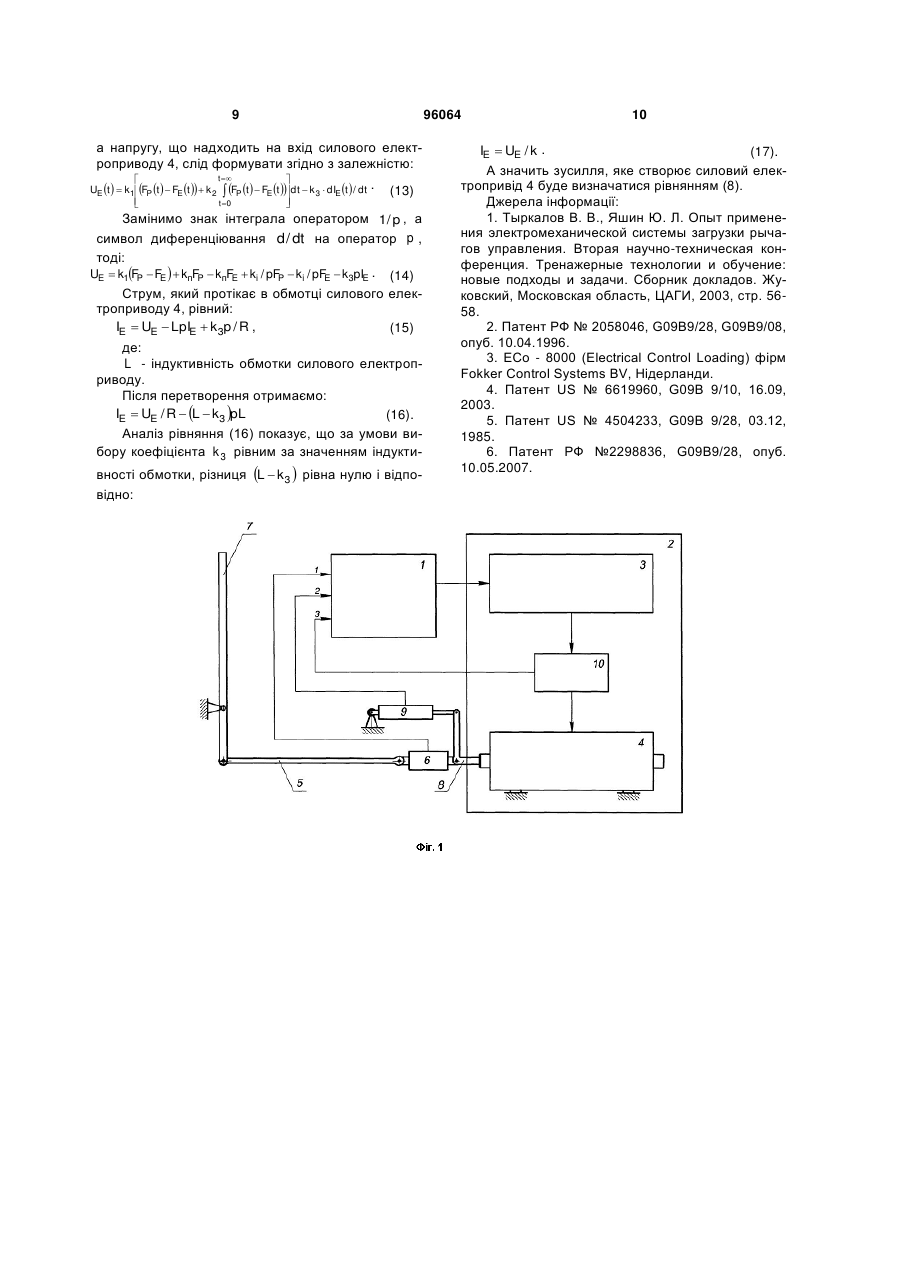
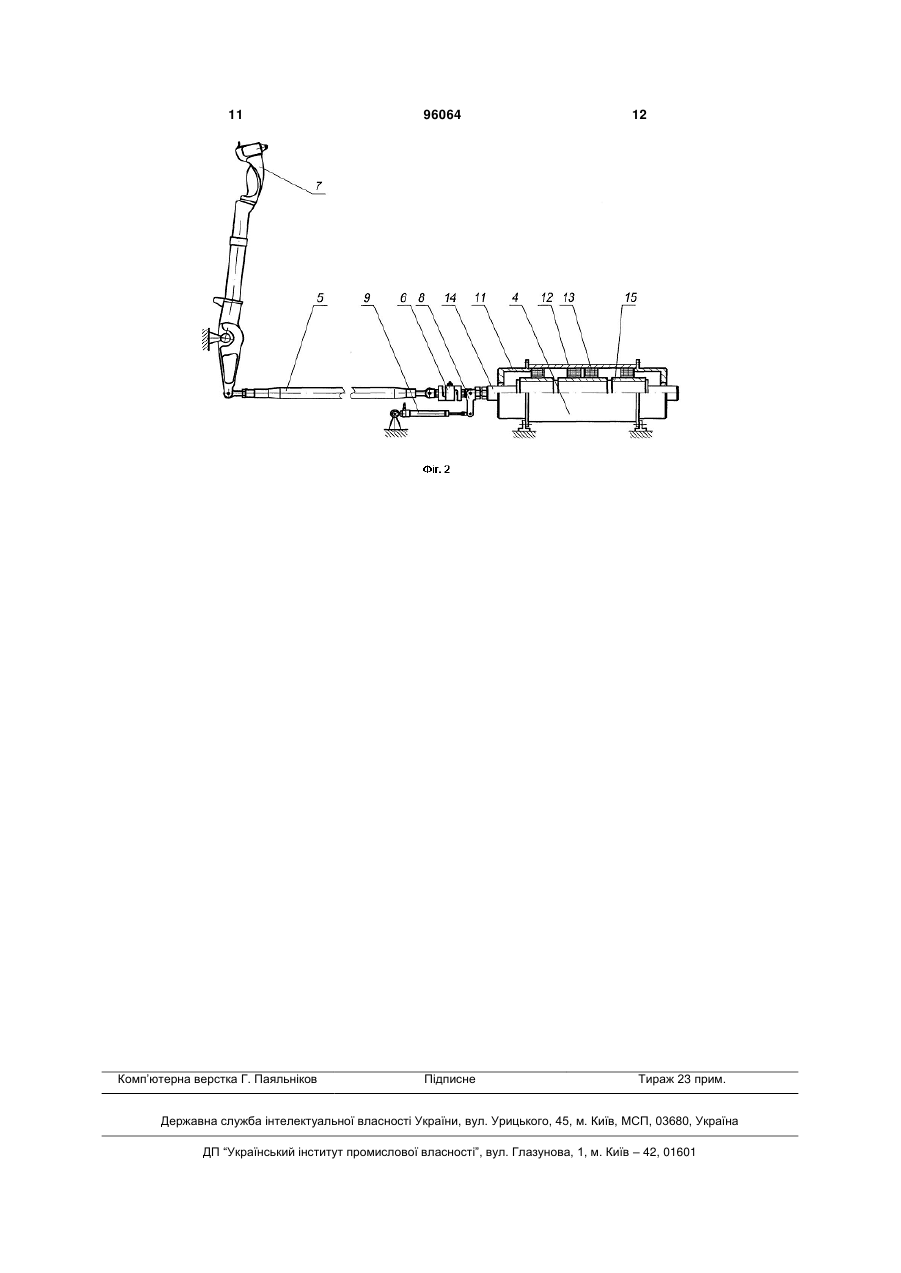
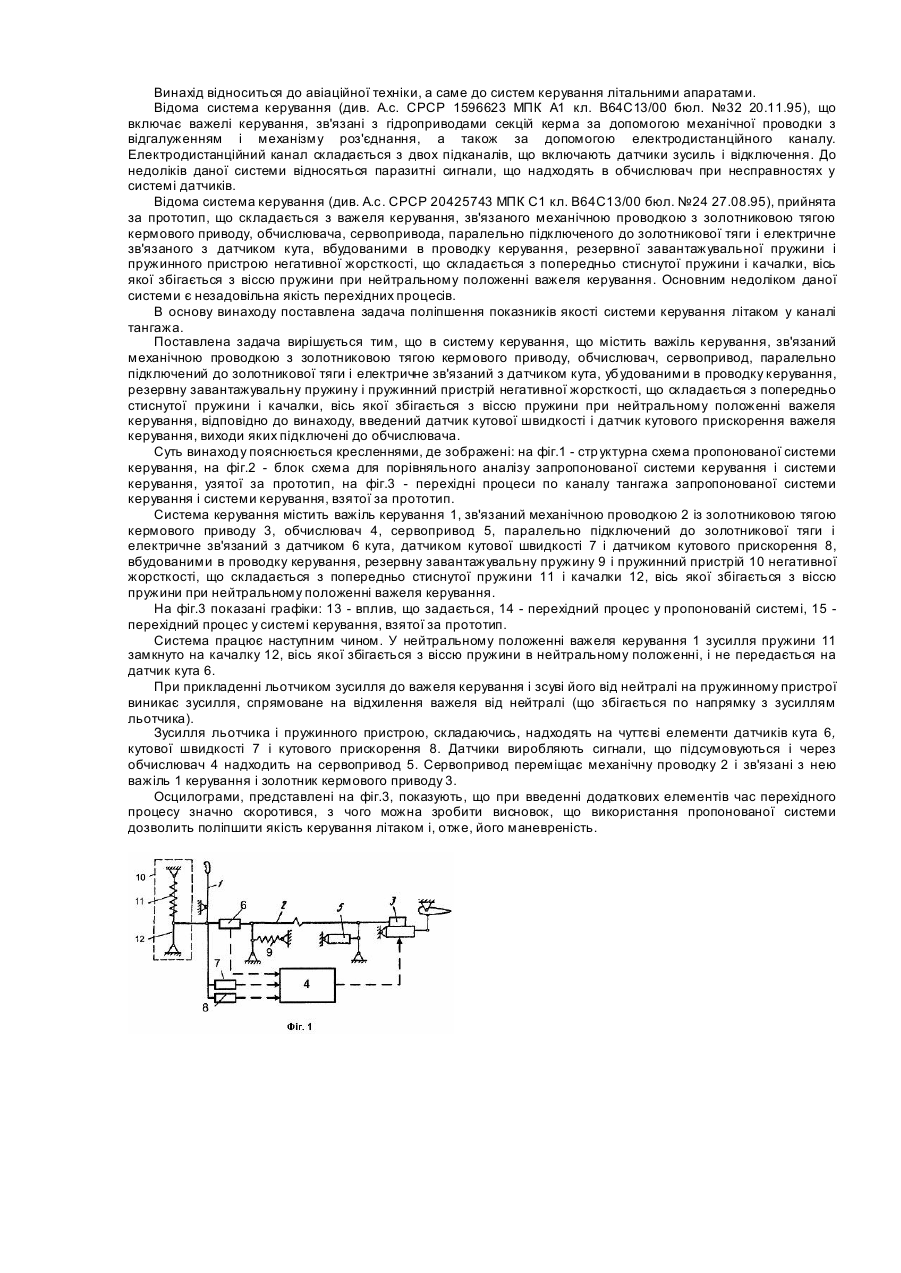
1. Система завантаження важеля керування авіаційного тренажера, що містить обчислювальний пристрій, механічно з'єднаний з важелем керування, датчик положення, вихід якого з'єднаний з входом обчислювального пристрою, завантажувальний пристрій з силовим електроприводом, яка відрізняється тим, що силовий електропривід виконаний у вигляді лінійного електромагнітного формувача зусилля, шток якоря якого з'єднаний з важелем керування через додатково введений датчик зусилля, вихід якого з'єднаний з першим входом обчислювального пристрою, крім цього, до складу завантажувального пристрою додатково введений двополярний регулятор напруги, вихід якого з'єднаний з входом силового електроприводу, а його вхід - з виходом обчислювального пристрою, при цьому параметри напруги на вході силового електроприводу відповідають виразу: t UE t k1 FP t FДЗ t k 2 FP t FДЗ t dt , (1) t 0 де: (19) 1 3 шляхом моделювання логіки і законів роботи системи керування й імітації завантаження органів керування авіаційного тренажера, а саме - створення зусиль на важелях керування авіаційного тренажера аналогічних зусиллям, що відчуваються льотчиком на усіх етапах польоту. Зусилля на важелях керування створюються системою завантаження, що має декілька (в залежності від кількості органів керування) незалежних кінематичних каналів, виконавчі елементи яких керуються, як правило, загальним обчислювачем. Відомі дві основні схеми системи завантаження [1], що відрізняються побудовою і включенням силового приводу. В першій з них привід виконаний з замкнутим власним зворотним зв'язком за положенням, тобто є слідкуючим. Він відпрацьовує сигнал заданого положення важеля керування, що надходить з моделі, яка реалізується в обчислювачі. У другій схемі [1] привід замикається власним зворотним зв'язком за швидкістю, тобто є слідкуючим приводом за швидкістю, який включається до складу моделі як інтегруюча ланка, що бере участь у розв'язанні рівняння руху важеля керування. Він відпрацьовує сигнал заданої швидкості руху важеля керування, що надходить з обчислювача. І в першому й в другому випадку силовий привід здійснює переміщення важеля керування відповідно до параметрів (положення або швидкості), заданих обчислювачем. Одним з основних недоліків вищезгаданих схем побудови системи завантаження є їхня схильність до втрати стійкості, що є властиве для слідкуючих систем [1]. Як правило для виконання вимог щодо точності відстеження вхідного сигналу ці системи повинні мати таке значення загального коефіцієнта підсилення, при якому вони втрачають стійкість, або мають сильну схильність до коливань. Це призводить до застосування спеціальних засобів для коригування, наприклад шляхом введення додаткових зворотних зв'язків [2], або до необхідності зниження вимог до якості процесу автоматичного регулювання, тобто до погіршення відтворення характеристик модельованих систем керування літальних апаратів [1]. Відома система завантаження [3], яка виконана за схемою з слідкуючим силовим приводом і яка включає цифровий обчислювач і три незалежні кінематичні канали з блоками завантаження, кожен з яких містить силовий привід з колекторним електродвигуном постійного струму, механічно пов'язаний з важелем керування, блок керування і контролю, датчик зусилля, датчик положення і блок живлення. Основними недоліками даної системи є схильність до втрати стійкості при широкому діапазоні зміни градієнтів завантаження і наявність динамічних спотворень інформації від датчика зусиль, що веде до погіршення відтворення характеристик модельованої системи і, відповідно, до вироблення у того хто навчається, помилкових навиків керування літальним апаратом. Крім того, використання колекторних електродвигунів постійного струму вимагає складних ме 96064 4 ханічних тяг, які повинні забезпечити перетворення обертового руху електродвигуна в коливальний рух важеля керування, а також узгодити швидкість обертання електродвигуна і момент який він створює зі швидкістю переміщення важеля керування та зусиллям на ньому. Відома лінійна система навантаження на органи керування [4], яка використовує як силовий привід пневматичні двигуни, а також відома система завантаження важеля керування авіаційного тренажера [5], в якій як силовий привід використано гідравлічний двигун. Дані системи виключають механізми для перетворення обертового руху в поступальний, але вони є високо інерційними та складними по конструкції. Найбільш близькою за технічним задумом до запропонованої системи завантаження важеля керування авіаційного тренажера є система завантаження важелів керування авіаційного тренажера [6], яка містить цифровий обчислювач, виконавчий блок завантаження, який включає кероване джерело струму, розімкнутий силовий привід, який з'єднаний жорстким механічним зв'язком з важелем керування, датчик положення. Вхід цифрового обчислювача з'єднаний з датчиком положення, який встановлений на валу силового приводу, а вихід - з входом керованого джерела струму, вихід якого з'єднаний з обмотками керування електродвигуна силового приводу. Вал силового приводу через жорсткий механічний зв'язок з'єднаний з важелем керування, а його корпус - з основою тренажера. Основним недоліком даної системи завантаження важеля керування авіаційного тренажера є те, що зусилля, з яким завантажувальний пристрій діє на важіль керування, безпосередньо не контролюється, а задається струмом в обмотках керування, внаслідок чого електропривід робить помилку при відслідковуванні зусилля, з яким пристрій системи керування літаком повинен діяти на важіль керування, що зумовлена нелінійною залежністю між струмом в обмотках керування електродвигуна і зусиллям, яке при цьому генерується внаслідок насичення магнітопроводів двигуна при великих значеннях струму. Крім того, має місце велика помилка відслідковування малих значень зусилля, оскільки в цьому випадку помилку будуть визначати сили тертя в кінематичних парах. Таким чином, дана система завантаження важеля керування авіаційного тренажера має низьку точність відтворення характеристик модельованих систем керування літаком, що призводить до зниження адекватності і якості професійної підготовки льотчиків. В основу винаходу поставлено задачу удосконалення системи завантаження важеля керування авіаційного тренажера шляхом зміни схеми завантажувального пристрою та зміни системи керування силовим електроприводом, що привело б до утворення замкнутої слідкуючої системи по створюваному силовим приводом зусиллю, а це забезпечило б оптимальне відтворення розрахованого зусилля на важелі керування, що дозволило б підвищити достовірність роботи авіаційних трена 5 96064 жерів та забезпечило б максимальне наближення умов навчання до реальних умов. Поставлена задача вирішується тим, що в системі завантаження важеля керування авіаційного тренажера, що містить обчислювальний пристрій, механічно з'єднаний з важелем керування датчик положення, вихід якого з'єднаний з входом обчислювального пристрою, завантажувальний пристрій з силовим електроприводом, згідно з винаходом, силовий електропривід виконаний у вигляді лінійного електромагнітного формувача зусилля, якір якого з'єднаний з важелем керування через додатково введений датчик зусилля, вихід якого з'єднаний з другим входом обчислювального пристрою, крім цього, до складу завантажувального пристрою додатково введений двополярний регулятор напруги, вихід якого з'єднаний з входом силового електроприводу, а його вхід - з виходом обчислювального пристрою, при цьому параметри напруги на вході силового електроприводу відповідають виразу: t UE t k1 FP t FДЗ t k 2 FP t FДЗ t dt (1) , t 0 де: UE t - напруга на вході силового електропри воду; k1, k 2 - нормувальні коефіцієнти; FP t - розраховане обчислювальним пристроєм значення завантаження важеля керування в залежності від його положення і параметрів польоту в функції часу; FДЗ t - значення зусилля, яке створює на своєму валу силовий електропривід і виміряне датчиком зусилля в функції часу. Крім того, поставлена задача вирішується тим, що завантажувальний пристрій додатково містить датчик струму, який підключений між виходом двополярного регулятора напруги та входом силового електроприводу, а його вихід з'єднаний з третім входом обчислювального пристрою, при цьому величина напруги на вході силового електроприводу визначається такою залежністю: UE t k1 FP t FE t k 2 t FP t FE t dt k3 dIc t / dt , (2) t 0 де: UE t - напруга на вході силового електроприводу; k1, k2, k3 - нормувальні коефіцієнти; FP t - розраховане обчислювальним пристроєм значення завантаження важеля керування в залежності від його положення і параметрів польоту в функції часу; FE t - значення зусилля, яке створює на своєму валу силовий електропривід, виміряне датчиком зусилля в функції часу; Ic t - величина струму силового електроприводу в функції часу; d / dt - символ диференціювання. 6 Додаткове введення у систему завантаження важеля керування авіаційного тренажера датчика зусилля, який з'єднує між собою шток якоря силового електроприводу, який виконаний у вигляді лінійного електромагнітного формувача зусилля, та важіль керування, а також введення до складу завантажувального пристрою двополярного регулятора напруги та керування силовим електроприводом напругою, вираженою рівнянням t UE t k1 FP t FДЗ t k 2 FP t FДЗ t dt , що t 0 дозволило створити замкнуту слідкуючу систему по створюваному силовим електроприводом зусиллю, що привело до оптимального відтворення розрахованого зусилля на важелі керування, що дозволило підвищити достовірність роботи авіаційного тренажера при одночасному спрощенні кінематичної схеми системи та забезпечило максимальне приближения умов навчання до реальних умов польотів. Крім того, додаткове введення у завантажувальний пристрій системи завантаження важеля керування авіаційного тренажера, датчика струму, який підключений між виходом двополярного регулятора напруги та входом силового електроприводу та керування силовим електроприводом напругою, вираженою рівнянням UE t k1 FP t FE t k 2 t FP FE dt k3 dIc t / dt , t 0 що дозволило зменшити інерційність слідкуючого контуру по зусиллю, що додатково підвищило достовірність роботи авіаційного тренажера. На фіг. 1 приведена схема запропонованої системи завантаження важеля керування авіаційного тренажера, на фіг. 2 - кінематична схема системи завантаження важеля керування авіаційного тренажера. Система завантаження важеля керування авіаційного тренажера (фіг. 1) містить обчислювальний пристрій 1, завантажувальний пристрій 2, який містить двополярний регулятор напруги 3 та силовий електропривід 4, механічні тяги 5, датчик зусилля 6, важіль керування 7, механічний важіль 8, датчик положення 9 та датчик струму 10. Перший та другий входи обчислювального пристрою 1 з'єднані відповідно з виходами датчика зусилля 6 та датчика положення 9, а його вихід з входом двополярного регулятора напруги 3, вихід якого з'єднаний з входом силового датчика струму 10, другий вихід якого з'єднаний з третім входом обчислювального пристрою 1, а перший вихід з'єднаний з входом електроприводу 4, який за допомогою механічних тяг 5 через датчик зусилля 6 з'єднаний з важелем керування 7. До виходу силового електроприводу 4 за допомогою механічного важеля 8, приєднаний датчик положення 9. Силовий електропривід 4 (фіг. 2) виконаний у вигляді лінійного електромагнітного формувача зусилля, що містить корпус 11 з магнітопроводом 12, на якому розміщені обмотки керування 13. В корпусі 11 розміщений якір 14, на якому встановлені постійні магніти 15. 7 Система завантаження важеля керування авіаційного тренажера працює наступним чином. Принцип роботи системи завантаження важеля керування авіаційного тренажера побудований на тому, що розраховують зусилля, з яким пристрої системи керування літального апарата діють на важіль керування 7 в залежності від його положення та параметрів польоту, а силовий електропривід 4 завантажувального пристрою 2 створює зусилля, рівне розрахованому і передає його за допомогою механічних тяг 5 на важіль керування 7 тренажера для відчуття цього зусилля льотчиком, що тренується. При цьому система завантаження є замкнутою слідкуючою системою по створюваному силовим приводом 4 зусиллю, що забезпечує оптимальне відтворення розрахованого зусилля на важелі керування 7 тренажера. Обчислювальний пристрій 1, в залежності від положення важеля керування 7, що визначається датчиком положення 9 та параметрів польоту, що імітуються засобами тренажера, які надходять на нього з обчислювальної системи тренажера (на кресленні не показана), розраховує значення зусилля FP t , з яким на важіль керування діють пристрої систем керування літального апарата. На обчислювальний пристрій 1 також надходить значення зусиль FE t , у відповідності до чого він формує на своєму виході сигнал Uк керування двополярним регулятором напруги 3 у відповідності до виразу: t Uк t k п FP t FЕ t k і FP t FЕ t dt , (3) t 0 де: k п - коефіцієнт передачі пропорційної складової керуючого сигналу; kі - коефіцієнт передачі інтегральної складової керуючого сигналу. Сформований у обчислювальному пристрої 1 у відповідності з рівнянням (3) сигнал Uк надходить на вхід двополярного регулятора напруги 3 завантажувального пристрою 2. Двополярний регулятор напруги 3 перетворює сигнал Uк за рівнем та потужністю. Напруга UЕ , пропорційна до рівня сигналу Uк з виходу двополярного регулятора напруги 3, надходить на силовий електропривід 4. Таким чином напруга UЕ , що подається на силовий електропривід 4 описується рівнянням: UЕ kрпUк , (4) де: k рп - коефіцієнт перетворення сигналу двополярного регулятора напруги 3 за рівнем. Підставляючи рівняння (3) у рівняння (4) отримаємо: t UЕ t k рпkп FP t FЕ t kрнk і FP t FЕ t dt . (5) t 0 Позначимо: k1 kрпkп 96064 8 k 2 kрпk1 (6) Запишемо рівняння (5) з врахуванням значень k1 та k 2 (6) t UЕ t k1FP t FЕ t k 2 FP t FЕ t dt . t 0 (7) При надходженні на вхід силового електроприводу 4 напруги UE t у його обмотці протікає струм IE t і, якщо силовий електропривід 4 характеризується малим індуктивним опором обмотки і незначним значенням протидіючої е.д.с, що наводиться в обмотці при русі якоря з малою швидкістю. Зусилля яке створює силовий електропривід, пропорційне струмові, який протікає в його обмотці. Враховуючи сказане запишемо рівняння зусилля, яке створює силовий електропривід 4: t FЕ t Cm / R k1FP t FЕ t Cm / R k 2 FP t FЕ t dt , t 0 (8) де: R - опір обмотки керування лінійного електромагнітного формувача зусилля; Cm - конструктивний коефіцієнт, що визначає зв'язок між струмом в обмотці лінійного електромагнітного формувача зусилля і зусиллям яке він створює. Створене зусилля FE t через механічні тяги 5 та датчик зусилля 6 передається на важіль керування 7 і діє на руку льотчика, що тренується. Напрям дії зусилля FE t визначається знаком напруги UE t . Датчик зусилля 6 вимірює величину FE t , створену силовим електроприводом 4, яка надходить на перший вхід обчислювального пристрою 1. Для проведення аналізу рівняння (8) знак інтеграла замінимо оператором 1/ p . Тоді рівняння (8) прийме вигляд: FE kпFP kпFE ki / pF ki / pF , (9) P E де: kп k1См / R . Після перетворення отримаємо: 1 kп ki / pFE kп ki / pFP (10). При достатньо великому значенні коефіцієнта передачі k п можна приймати 1 kп kп , тоді рівняння (10) можна записати у вигляді kп ki / pFE kп ki / pFP (11). Поділимо ліву та праву частини рівняння на величину kп ki / p і отримаємо: FE FP (12). Таким чином зусилля, створюване силовим електроприводом 4, рівне розрахованому. При аналізі було прийнято, що індуктивний опір обмотки силового електроприводу 4 незначний. У випадку, якщо немає можливості використати силовий електропривід з малим індуктивним опором, доцільно ввести зворотний зв'язок по струму, що протікає в силовому електропривіді 4, 9 96064 а напругу, що надходить на вхід силового електроприводу 4, слід формувати згідно з залежністю: t UE t k1FP t FE t k 2 FP t FE t dt k 3 dIE t / dt t 0 . (13) Замінимо знак інтеграла оператором 1/ p , а символ диференціювання d / dt на оператор p , тоді: UE k1FP FE kпFP kпFE ki / pF ki / pF k3pIE . (14) P E Струм, який протікає в обмотці силового електроприводу 4, рівний: IE UE LpIE k3p / R , (15) де: L - індуктивність обмотки силового електроприводу. Після перетворення отримаємо: IE UE / R L k3 pL (16). Аналіз рівняння (16) показує, що за умови вибору коефіцієнта k 3 рівним за значенням індуктивності обмотки, різниця L k3 рівна нулю і відповідно: 10 IE UE / k . (17). А значить зусилля, яке створює силовий електропривід 4 буде визначатися рівнянням (8). Джерела інформації: 1. Тыркалов В. В., Яшин Ю. Л. Опыт применения электромеханической системы загрузки рычагов управления. Вторая научно-техническая конференция. Тренажерные технологии и обучение: новые подходы и задачи. Сборник докладов. Жуковский, Московская область, ЦАГИ, 2003, стр. 5658. 2. Патент РФ № 2058046, G09B9/28, G09B9/08, опуб. 10.04.1996. 3. ЕСо - 8000 (Electrical Control Loading) фірм Fokker Control Systems BV, Нідерланди. 4. Патент US № 6619960, G09B 9/10, 16.09, 2003. 5. Патент US № 4504233, G09B 9/28, 03.12, 1985. 6. Патент РФ №2298836, G09B9/28, опуб. 10.05.2007. 11 Комп’ютерна верстка Г. Паяльніков 96064 Підписне 12 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAviation training device control arm charging system
Автори англійськоюKozhan Mykhailo Yaroslavovych, Kushnir Bohdan Yosypovych, Machohan Yurii Vasyliovych, Slobodian Ihor Stanislavovych, Snitkov Ihor Filatovych, Kharchyshyn Bohdan Mykhailovych, Chaikovskyi Roman Ivanovych
Назва патенту російськоюСистема загрузки рычага управления авиационного тренажера
Автори російськоюКожан Михаил Ярославович, Кушнир Богдан Иосифович, Мачоган Юрий Васильевич, Слободян Игорь Станиславович, Снитков Игорь Филатович, Харчишин Богдан Михайлович, Чайковский Роман Иванович
МПК / Мітки
МПК: G09B 9/02
Мітки: керування, авіаційного, тренажера, система, важеля, завантаження
Код посилання
<a href="https://ua.patents.su/6-96064-sistema-zavantazhennya-vazhelya-keruvannya-aviacijjnogo-trenazhera.html" target="_blank" rel="follow" title="База патентів України">Система завантаження важеля керування авіаційного тренажера</a>
Спосіб юстирування системи візуалізації авіаційного тренажера
Номер патенту: 25508
Опубліковано: 10.08.2007
Автори: Потапова Галина Костянтинівна, Москаленко Михайло Андрійович
МПК: G09B 9/02
Мітки: тренажера, юстирування, авіаційного, системі, візуалізації, спосіб
Формула / Реферат:
1. Спосіб юстирування системи візуалізації авіаційного тренажера, який полягає у тому, що заздалегідь розрахунковим шляхом визначають правило спотворення координат точок зображень, що подаються на вхід системи візуалізації для отримання на проекційному екрані не спотворених при спостереженні із заданої точки спостереження зображень при номінальних параметрах системи візуалізації, після юстирування оптичної проекційної системи на її вхід...
Система блокування важеля перемикання передач
Номер патенту: 57112
Опубліковано: 16.06.2003
Автори: Вінюков Дмитро Михайлович, Гужва Юрій Михайлович, Блюмін Аркадій Юрійович, Смоляков Василь Андрійович
МПК: B62D 11/00, B60W 10/10, B60K 20/00
Мітки: блокування, перемикання, передач, система, важеля
Формула / Реферат:
1. Система блокування важеля перемикання передач, що містить блок автоматичного керування, зв'язаний з блоком датчиків вищих передач і з блокувальним електромагнітом, і датчик швидкості обертання напрямного колеса, яка відрізняється тим, що в неї введений формувач-інтегратор, при цьому датчик швидкості обертання напрямного колеса включає встановлені на валу ізольоване кільце і дві обичайки, симетрично рознесені по боках відносно діаметра...
Система керування літаком
Номер патенту: 63672
Опубліковано: 15.01.2004
Автори: Теницька Яна Миколаївна, Симонов Володимир Федорович, Западня Артем Валентинович, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: літаком, керування, система
Формула / Реферат:
Система керування літаком, що складається з важеля керування, зв'язаного механічною проводкою з золотниковою тягою кермового приводу, обчислювача, сервоприводу, паралельно підключеного до золотникової тяги і електрично зв'язаного з датчиком кута, вмонтованими в проводку керування, резервної завантажувальної пружини і пружинного пристрою негативної жорсткості, що складається з попередньо стиснутої пружини і качалки, вісь якої збігається з...
Система завантаження узагальнених виробничих систем складання на основі статистичного керування складними технологічними процесами
Номер патенту: 45225
Опубліковано: 26.10.2009
Автори: Діордіца Ірина Миколаївна, Вислоух Сергій Петрович, Філіппов Олексій В'ячеславович, Філіппова Марина В`ячеславівна, Іваненко Руслан Олександрович, Діордіца Анна Миколаївна
МПК: B23Q 41/08
Мітки: складними, керування, статистичного, система, основі, узагальнених, процесами, виробничих, технологічними, завантаження, систем, складання
Формула / Реферат:
Система завантаження узагальнених виробничих систем складання на основі статистичного керування складними технологічними процесами, що містить блок керування виробничою системою, в який входить блок оператора, вхід якого підключено до виходу блока інформації про виробничі завдання, а вихід - до входу блока статистичного керування складними технологічними процесами, який має зв'язок з блоком "узагальнена виробнича система" та містить...
Система керування літальним апаратом
Номер патенту: 36519
Опубліковано: 27.10.2008
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Полторацька Маргарита Миколаївна
МПК: B64C 13/00, G05D 1/03
Мітки: керування, система, апаратом, літальним
Формула / Реферат:
Система керування літальним апаратом, що містить важіль керування, завантажувальну пружину, датчик кутового положення важеля керування, обчислювач, сервопривід керма висоти, кермо висоти, датчик кута тангажа, датчик кутової швидкості та датчик кутового прискорення літального апарата, перший диференціюючий пристрій, другий диференціюючий пристрій, яка відрізняється тим, що до її складу введені перший аналого-цифровий перетворювач, вхід якого...