Спосіб регулювання положення відсічного золотника
Номер патенту: 104504
Опубліковано: 10.02.2014
Автори: Фєдосовскій Міхаіл Євгєньєвіч, Кушбасов Асилхан Нарімановіч, Дунаєв Вадім Ігорєвіч
Формула / Реферат
1. Спосіб регулювання положення відсічного золотника, що керує переміщенням сервомотора, який у свою чергу керує клапанами парової турбіни в системі регулювання парової турбіни, з динамічною корекцією зміщення ″нуля″ відсічного золотника, який включає: визначення необхідної величини переміщення відсічного золотника для досягнення
заданого положення сервомотора і переміщення відсічного золотника відповідно до раніше визначеного значення, який відрізняється тим, що на етапі визначення величини переміщення відсічного золотника до початку регулювання вимірюють значення зміщення ″нуля″ відсічного золотника в різних положеннях штока сервомотора в усьому діапазоні переміщення цього штока; а при регулюванні здійснюють розрахунок величини динамічної корекції зміщення ″нуля″ для заданого положення штока сервомотора з урахуванням зміщення ″нуля″, виміряного для поточного положення штока сервомотора, і величину переміщення відсічного золотника здійснюють відповідно до розрахованої величини динамічної корекції зміщення ″нуля».
2. Спосіб за п. 1, який відрізняється тим, що для регулювання положення відсічного золотника застосовують електромеханічний перетворювач, шток якого жорстко з'єднаний зі штоком відсічного золотника, утворюючи єдину ланку регулювання.
3. Спосіб за п. 1, який відрізняється тим, що при ручному вимірюванні зміщення ″нуля″ відсічного золотника примусово позиціонують сервомотор послідовно в кілька положень, і для кожного положення штока сервомотора визначають зміщення ″нуля″ відсічного золотника за індикацією відповідних датчиків положення.
4. Спосіб за п. 1, який відрізняється тим, що при вимірюванні зміщення ″нуля″ відсічного золотника з застосуванням програмованого контролера позиціонують сервомотор послідовно в кілька положень із заданим кроком, зазначений програмований контролер реєструє показання датчика положення, розташованого на штоку сервомотора, при наявності коливань сервомотора вимірює інтегральну складову відповідних коливань відсічного золотника до стабілізації сервомотора і реєструє зміщення ″нуля″ відсічного золотника з урахуванням цієї інтегральної складової.
5. Спосіб за п. 1, який відрізняється тим, що в системі автоматичного регулювання з резервуванням, яка містить більше одного каналу керування, вимірювання зміщень ″нуля″ відсічного золотника виконують окремо для кожного каналу.
6. Спосіб за п. 1, який відрізняється тим, що в системі автоматичного регулювання, яка містить більше одного сервомотора, вимірювання зміщень ″нуля″ відсічного золотника виконують окремо для кожного сервомотора.
Текст
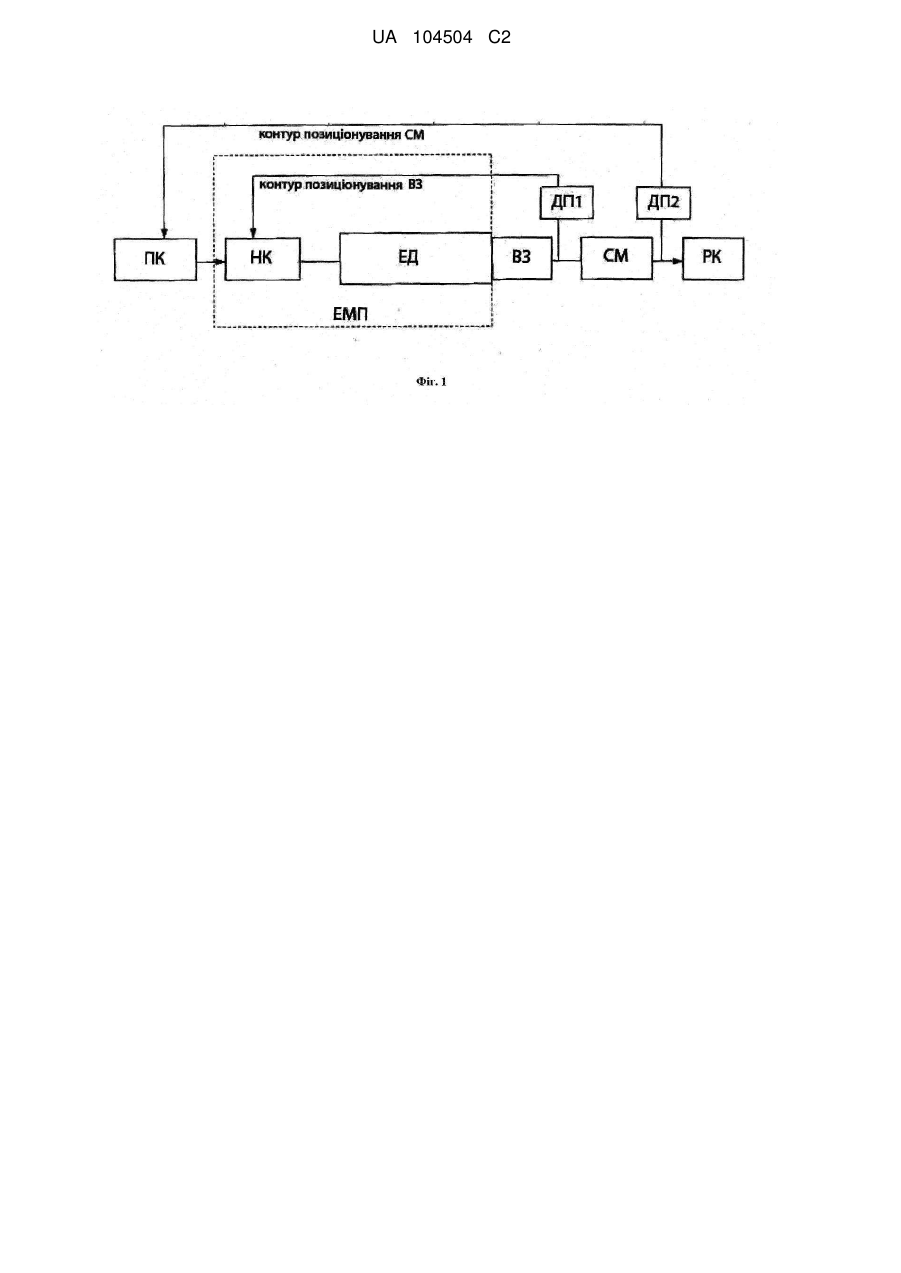
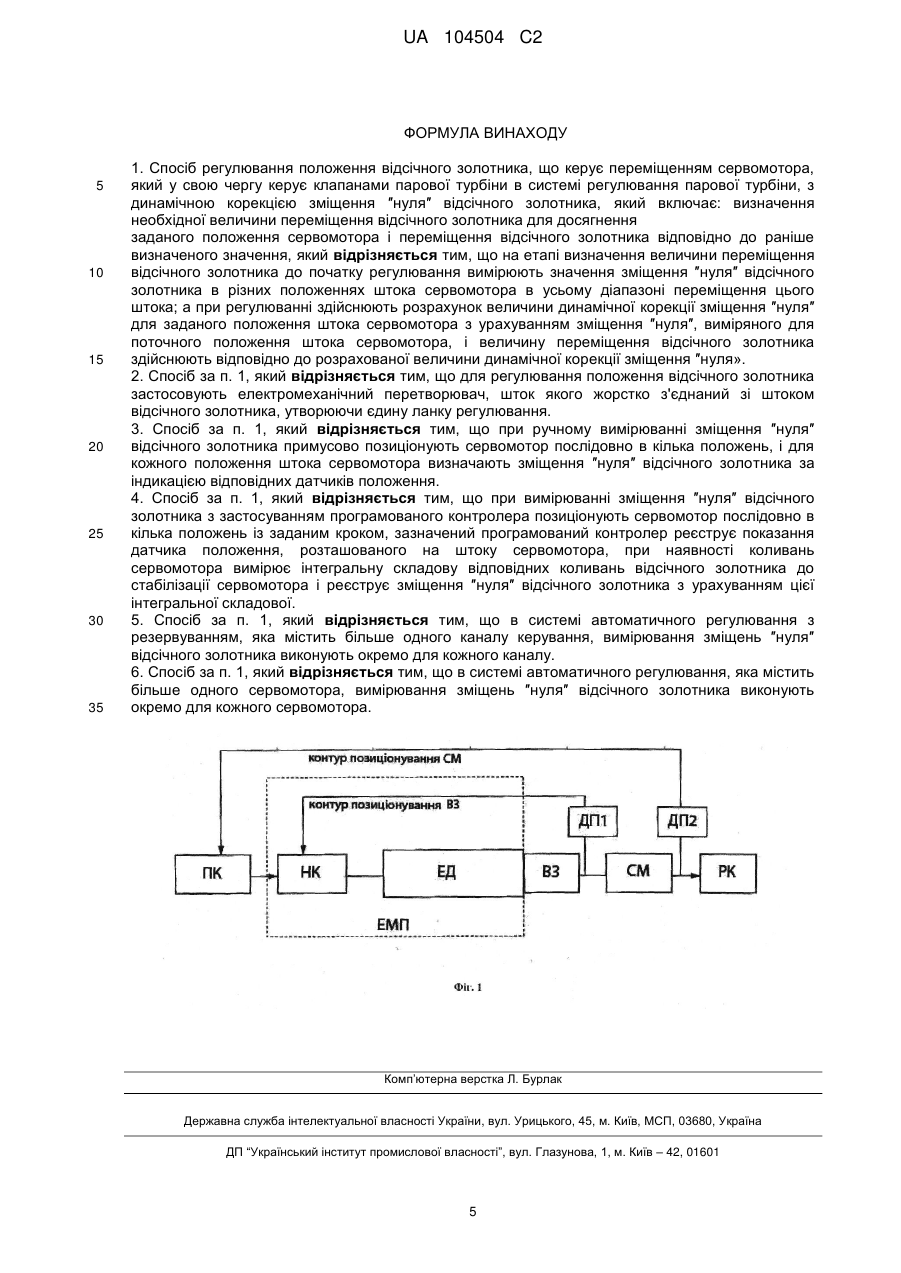
Реферат: Винахід належить до області енергетики і може бути використаний у електрогідравлічних системах регулювання парових турбін із застосуванням засобів мікропроцесорної техніки. Запропоновано спосіб регулювання положення відсічного золотника, що керує переміщенням сервомотора, який у свою чергу керує клапанами парової турбіни в системі регулювання парової турбіни з динамічною корекцією зміщення ″нуля″ відсічного золотника, який включає: визначення необхідної величини переміщення відсічного золотника для досягнення заданого положення сервомотора і переміщення відсічного золотника відповідно до раніше визначеного значення, який відрізняється тим, що на етапі визначення величини переміщення відсічного золотника до початку регулювання вимірюють значення зміщення ″нуля″ відсічного золотника у різних положеннях штока сервомотора в усьому діапазоні переміщення цього штока; а при регулюванні здійснюють розрахунок величини динамічної корекції зміщення ″нуля″ для заданого положення штока сервомотора з урахуванням зміщення ″нуля″, виміряного для поточного положення штока сервомотора, і враховують динамічну корекцію ″нуля″ при визначенні величини переміщення відсічного золотника. Технічним результатом є підвищення точності позиціонування регулювальних клапанів внаслідок мінімізації пульсацій сервомотора в усталеному режимі шляхом корекції положення ″нуля″ відсічного золотника при зміні поточних умов роботи системи регулювання. UA 104504 C2 (12) UA 104504 C2 UA 104504 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області енергетики і може бути використаний в електрогідравлічних системах регулювання парових турбін із застосуванням засобів мікропроцесорної техніки. Регулювання парової турбіни здійснюється за допомогою регулювання положення відсіяного золотника, що переміщує шток сервомотора, який у свою чергу керує регулювальними клапанами, тобто подачею пари на турбіну. Застосовувані способи регулювання положення відсічного золотника передбачають знаходження відсічного золотника в певному однозначному положенні, яке відповідає усталеному положенню сервомотора. Однак для парових турбін із високонавантаженими сервомоторами це не відповідає дійсності. Під дією численних факторів, що найчастіше не піддаються прогнозуванню, таких як температура, тиск масла й наявність у ньому пухирців повітря, зношування деталей, що труться, та ін., нульове положення відсічного золотника змінюється, що призводить до пульсацій сервомотора і тим самим знижується точність позиціонування регулювальних клапанів, а також знижується ресурс органів паророзподілу. Відомий спосіб регулювання положення відсічного золотника, викладений у DE 4236846 (Аl). Спосіб оснований на використанні гідравлічної системи регулювання положення відсічного золотника, в якій на додаток до відсічного золотника застосований допоміжний клапан, оснащений електромагнітним пристроєм із регулятором положення, за допомогою якого допоміжний клапан передає відсічному золотнику переміщення на величину, яка відповідає неузгодженості між дійсним і заданим положенням штока сервомотора. Відомий спосіб не є складним для реалізації, однак не має високої точності та швидкодії. Крім того, відомий спосіб має суттєвий недолік, властивий гідравлічній системі регулювання: залежність золотникових елементів із малими переставними зусиллями від якості масла, тобто від попадання механічних часток, які завжди є в маслі, навіть якщо воно має бездоганні показники за результатами контрольного відбору. Більш досконалий спосіб регулювання положення відсічного золотника викладений в US 2004081549 (ΑΙ). В електрогідравлічній системі автоматичного регулювання швидкості обертання турбіни в контур регулювання положення відсічного золотника включений електромеханічний перетворювач, контролер для керування цим перетворювачем і логічний модуль, який обробляє сигнали зворотного зв'язку з зовнішніх контурів положення сервомотора та швидкості обертання турбіни. Електромеханічний перетворювач виконаний із використанням двох електромагнітних котушок, одна з яких є основною, а інша додатковою. Основна котушка створює переставне зусилля для переміщення відсічного золотника відповідно до сигналу завдання від контролера, додаткова котушка живиться окремо і створює додаткове переставне зусилля за сигналом завдання від логічного модуля. Використання додаткової електромагнітної котушки дозволяє, коли це необхідно, компенсувати недостатнє переміщення відсічного золотника, створюване основною котушкою, і таким чином підвищити точність регулювання. Однак суттєвим недоліком цього способу є той факт, що регулювання здійснюють за сигналами зворотного зв'язку, із затримкою, обумовленою швидкодією системи регулювання, з попередньо встановленими параметрами контролерів і без урахування зміни поточних умов роботи системи регулювання, що не дозволяє мінімізувати пульсації сервомотора в усталеному режимі. Завданням пропонованого винаходу є суттєве підвищення точності позиціонування регулювальних клапанів внаслідок мінімізації пульсацій сервомотора в усталеному режимі шляхом корекції положення "нуля" відсічного золотника при зміні поточних умов роботи системи регулювання, а також вирішення проблеми відмов системи автоматичного регулювання через попадання в золотникові пристрої механічних часток. Зазначене завдання вирішене завдяки тому, що в способі регулювання положення відсічного золотника, що керує переміщенням сервомотора, який у свою чергу керує клапанами парової турбіни в системі регулювання парової турбіни з динамічною корекцією зміщення "нуля" відсічного золотника, який включає визначення необхідної величини переміщення відсічного золотника для досягнення заданого положення сервомотора і переміщення відсічного золотника відповідно до раніше визначеного значення, на етапі визначення величини переміщення відсічного золотника до початку регулювання вимірюють значення зміщення "нуля" відсічного золотника в різних положеннях штока сервомотора в усьому діапазоні переміщення цього штока, а при регулюванні здійснюють розрахунок величини динамічної корекції зміщення "нуля" для заданого положення штока сервомотора з урахуванням зміщення "нуля", виміряного для поточного положення штока сервомотора, і враховують динамічну корекцію "нуля" при визначенні величини переміщення відсічного золотника. До початку регулювання вимірюють значення зміщення "нуля" відсічного золотника в різних положеннях штока сервомотора в усьому діапазоні його переміщень і в результаті цих 1 UA 104504 C2 5 10 15 20 25 30 35 40 45 50 55 вимірювань одержують залежність зміщення "нуля" відсічного золотника від положення сервомотора, яка відображає вплив регулювального клапана й пов'язаних із ним пружин на зміщення "нуля" відсічного золотника. Крім того, коли пара подається в турбіну, зміщення "нуля" відбувається через зусилля, створювані паром на регулювальний клапан і зміни тиску масла в лінії сервомотора. Зміщення "нуля" відсічного золотника призводить до зниження точності, а отже до багаторазових ітерацій регулювання, що призводить до пульсацій сервомотора. Для компенсації зазначених впливів обчислюють величину динамічної корекції зміщення "нуля" для заданого положення штока сервомотора. Цю величину обчислюють із урахуванням значень зміщення "нуля", виміряних до початку регулювання, та інтегральної складової, яка відображає вплив факторів, що з'являються при подачі пари в турбіну. Обчислену величину динамічної корекції враховують при визначенні необхідного положення відсічного золотника для досягнення заданого положення сервомотора, завдяки чому компенсують перераховані вище негативні впливи й мінімізують пульсації сервомотора, тим самим підвищуючи точність регулювання. У переважному варіанті реалізації переміщення відсічного золотника здійснено за допомогою електромеханічного перетворювача. У цьому випадку штоки електромеханічного перетворювача й відсічного золотника жорстко з'єднані, утворюючи єдину ланку регулювання. У контурі позиціонування відсічного золотника є наявним датчик положення відсічного золотника. Переміщення відсічного золотника визначає зміну положення сервомотора. Контур позиціонування сервомотора є зовнішнім відносно контуру позиціонування відсічного золотника, і в ньому також є наявним датчик положення, встановлений на штоку сервомотора. В описі даного винаходу термін "положення сервомотора" застосований для спрощення й позначає положення штока сервомотора. Вимірювання зміщення "нуля" відсічного золотника в залежності від положення сервомотора можливо виконувати як вручну, так і за допомогою автопідстроювання. При ручному вимірюванні примусово позиціонують сервомотор у різні положення в усьому діапазоні його регулювання і для кожного з цих положень сервомотора реєструють зміщення "нуля" відсічного золотника за показами датчика положення відсічного золотника. Вимірювання зміщень "нуля" відсіяного золотника виконують із застосуванням програмованого контролера в контурі позиціонування сервомотора. Послідовно позиціонують сервомотор у кілька положень із заданим кроком, зазначений програмований контролер реєструє покази датчика положення, розташованого на штоку сервомотора, і при наявності коливань сервомотора змінює інтегральну складову відповідних коливань відсічного золотника до стабілізації сервомотора, потім реєструє зміщення "нуля" відсічного золотника з урахуванням цієї інтегральної складової. Вимірювання зміщень "нуля" відсічного золотника за допомогою автопідстроювання дозволяє досягти більшої точності регулювання, при цьому процес вимірювань вимагає більше часу, ніж при менш точному ручному вимірюванні. Отримані дані, як при ручному, так і при автоматичному вимірюванні, зберігають у вигляді масиву в пам'яті програмованого контролера й використовують у вигляді корекції при визначенні необхідної величини переміщення відсічного золотника для досягнення заданого положення сервомотора. Визначення величини переміщення відсічного золотника виконує програмований контролер, включений в контур позиціонування сервомотора. При визначенні необхідної величини переміщення відсічного золотника враховується динамічна корекція зміщення "нуля" відсічного золотника, яка обчислюється з урахуванням складової елемента масиву зміщення "нуля" для поточного положення сервомотора, виміряної в режимі випробування. У CAP із резервуванням, які містять більше одного каналу керування, вимірювання зміщень "нуля" відсічного золотника і формування масиву виміряних значень виконують окремо для кожного каналу й застосовують динамічну корекцію положення "нуля" відсічного золотника при роботі будь-якого каналу керування. У CAP, що містять більше одного CM, вимірювання зміщень "нуля" відсічного золотника та формування масиву виміряних значень виконують окремо для кожного CM і застосовують динамічну корекцію положення "нуля" відсічного золотника при роботі будь-якого CM. Позиціонування відсічного золотника з урахуванням динамічної корекції "нуля" дозволяє мінімізувати амплітуду коливань відсічного золотника в усталеному режимі, отже, й амплітуду пульсацій сервомотора. Крім того, використовуваний у запропонованому способі для переміщення відсічного золотника електромеханічний перетворювач дозволяє розвинути значне зусилля, що дозволяє вирішити проблему відмов CAP внаслідок попадання в золотникові пристрої механічних часток. 2 UA 104504 C2 5 10 15 20 25 30 35 40 45 50 55 60 Система автоматичного регулювання парової турбіни, як правило, містить наступні контури регулювання, перераховані в порядку слідування від зовнішнього до внутрішнього: контур регулювання активної потужності турбогенератора, регулювання частоти обертання ротора турбіни, підтримання тиску пари, контур позиціонування сервомотора і контур позиціонування відсічного золотника. Для опису запропонованого способу регулювання положення відсічного золотника, інтерес представляє контур позиціонування сервомотора і внутрішній відносно нього контур позиціонування відсічного золотника. Тому в описі запропонованого способу регулювання контури регулювання, зовнішні відносно контуру позиціонування сервомотора, не розглядаються. На Фіг. 1 схематично показаний фрагмент CAP, який містить контур позиціонування сервомотора. Як показано на Фіг. 1, контур позиціонування сервомотора CM є зовнішнім відносно контуру позиціонування відсічного золотника ВЗ в системі автоматичного регулювання. Контур позиціонування ВЗ містить внутрішні контури регулювання швидкості й струму, які для простоти викладення не зображені на Фіг. 1. На апаратному рівні контур позиціонування ВЗ сформований електромеханічним перетворювачем ЕМП і датчиком ДП1 положення ВЗ. ЕМП у свою чергу містить налаштовуваний Контролер НК, електродвигун ЕД і вихідний шток, пов'язаний із ротором ЕД механізмом, який перетворює обертальний рух ротора в поступальний рух штока. При цьому шток ЕМП жорстко з'єднаний зі штоком відсічного золотника, утворюючи єдину ланку контуру регулювання. Таким чином, завдання позиціонування ВЗ приведене до регулювання обертання електродвигуна. НК здійснює регулювання обертання електродвигуна відповідно до сигналу завдання на переміщення ВЗ, отриманого від програмованого контролера (ПК) з зовнішнього контуру позиціонування СМ. НК виконаний із можливістю попереднього налаштування установок струму і швидкості відповідно до застосовуваного електродвигуна. Датчик положення СМ (ДП2) включений в контур позиціонування CM, зовнішній відносно контуру позиціонування ВЗ. ДП2 встановлений на штоку сервомотора, який має твердий механічний зв'язок із регулювальним клапаном турбіни РК. Сигнал зазначеного датчика, який відповідає поточному положенню CM, надходить до ПК, який обчислює величину переміщення ВЗ, необхідного для досягнення заданого положення СМ. ПК також визначає задане положення CM на основі сигналів від зовнішніх контурів CAP парової турбіни, не зображених на Фіг. 1. Запропонований спосіб регулювання положення ВЗ з динамічною корекцією "нуля" включає на першому етапі одержання залежності зміщення "нуля" відсічного золотника від положення штока сервомотора в усьому діапазоні регулювання CM. З цією метою примусово позиціонують СМ у різні положення в усьому діапазоні його регулювання і для кожного з цих положень сервомотора вимірюють відповідне зміщення "нуля" відсічного золотника. Вимірювання може бути виконане як вручну, за допомогою візуальної реєстрації показів датчиків, так і за допомогою автопідстроювання. Ручне вимірювання виконують при виключеному генераторі й зупиненій турбіні. При ручному вимірюванні відключають контур автоматичного позиціонування CM і примусово позиціонують CM послідовно в кілька положень із довільно обраним кроком, проходячи при цьому весь діапазон регулювання CM. Для кожного положення CM вимірюють відповідне йому зміщення "нуля" ВЗ. Вимірювання положень CM і ВЗ здійснюється візуально за індикацією датчиків положення CM і ВЗ. Отриманий масив значень записують у пам'ять ПК. Зміщення "нуля" ВЗ, які відповідають проміжним значенням положення CM, одержують шляхом апроксимації, формуючи таким чином масив заданої розмірності. Наприклад, для CM із діапазоном регулювання від 0 до 320 мм позиціонують CM із кроком 10 мм і одержують 32 значення зміщення "нуля" ВЗ, потім обчислюють проміжні значення методом апроксимації і таким чином одержують масив із 320 значень зміщення "нуля" ВЗ. Ручне вимірювання зміщень ВЗ застосовують у випадку, коли не потрібна висока точність корекції. Автопідстроювання виконують із застосуванням ПК при включеному контурі автоматичного позиціонування CM. Задають послідовне позиціонування CM із кроком 1 мм у всьому діапазоні регулювання. У цьому режимі автоматичного позиціонування CM при визначенні зміщення ВЗ враховують не тільки пропорційну, але й інтегральну складову. За сигналом з датчика ДП2 ПК визначає наявність коливань СМ, при цьому кожні 10 мс обчислює інтегральну складову для мінімізації відповідних коливань положення ВЗ і накопичує цю інтегральну складову до стабілізації положення CM. Якщо поточне положення CM відповідає заданому, і коливання CM відсутні протягом 5 сек. (може бути заданий інший час витримки), то ПК записує накопичену інтегральну складову в елемент масиву, який відповідає зміщенню "нуля" ВЗ для поточного положення CM. Після цього ПК приймає рішення про перехід у наступну точку позиціонування, до заданої координати позиціонування CM додається 1 мм. 3 UA 104504 C2 Інтегральну складову обчислюють за формулою: ВЗ ВЗ 0,01 Error Tu зміщ зміщ (1) ВЗ 5 10 15 20 25 де зміщ - накопичена інтегральна складова, Error - помилка за регульованим параметром у відносних одиницях, яка обчислюється як різниця заданого і поточного положень сервомоторів у абсолютних одиницях, поділена на діапазон переміщень сервомотора, Tu - коефіцієнт підсилення інтегральної складової, який на даному етапі є постійною величиною і підібраний так, щоб забезпечити високу точність позиціонування CM. Tu = 0,07. Таким чином формують масив для корекції зміщень "нуля" ВЗ. Для CM із діапазоном регулювання від 0 до 320 мм масив складається з 320 елементів. Значення, які складають цей масив, відображають вплив регулювальних клапанів і встановлених на них пружин на зміщення "нуля" ВЗ. Значення елементів цього масиву відображають реальні характеристики CM. Зміщення "нуля" ВЗ може бути нерівномірним у всьому діапазоні переміщень CM. Отриманий на цьому етапі масив далі використовують при обчисленні динамічної корекції зміщення "нуля" ВЗ. У CAP, виконаній із резервуванням каналу керування, вимірювання зміщень ВЗ виконують для кожного каналу керування окремо і для кожного каналу окремо формують масив значень інтегральної складової зміщення "нуля" ВЗ. У CAP, виконаній із декількома CM, вимірювання зміщень "нуля" ВЗ виконують окремо для кожного CM і для кожного CM окремо формують масив значень інтегральної складової зміщення "нуля" ВЗ. Наступний етап стабілізації ВЗ виконують при включеному генераторі, коли пар подається в турбіну. У цьому випадку зміщення "нуля" відбувається через зусилля, створювані паром на клапан, люфтів у електромеханічному перетворювачі, зміни тиску масла в лінії сервомотора. Щоб компенсувати ці зусилля, в контур позиціонування CM вводять інтегральну складову зі змінним коефіцієнтом підсилення. Динамічну корекцію зміщення "нуля" ВЗ обчислюють за формулою: СМ ВЗ ВЗ Нпот кор зміщ ВЗ кор 1 СМ Тu HСМ Нпот зад t СМ HСМ Нпот dt зад (2) 0 - динамічна корекція "нуля" ВЗ, ВЗ зміщ - корекція зміщення "нуля" ВЗ для поточного положення CM зі сформованого на попередньому етапі масиву, 30 35 40 СМ Нпот - поточне положення CM у відносних одиницях, HСМ - задане положення СМ у відносних одиницях, зад Тu - змінний коефіцієнт підсилення інтегральної складової. Тu приймає наступні значення: Тu = 0, якщо Error = 0, Тu = 0,1, якщо Error < 3 мм, Тu = 0,6, якщо 3 Error 4 мм. Обчислену за зазначеною формулою динамічну корекцію "нуля" ВЗ враховують при визначенні зміщення ВЗ, необхідного для досягнення заданого положення CM, виходячи з поточного положення CM. Зміщення ВЗ визначають за формулою: СМ ВЗ (HСМ Нпот ) kP ВЗ , зад зад кор ВЗ - необхідне положення ВЗ, зад ВЗ кор 45 - динамічна корекція "нуля" ВЗ, обчислена за формулою (2), kp - пропорційний коефіцієнт підсилення регулятора, визначається виходячи з характеристик CAP. Величина необхідного зміщення ВЗ, обчислена програмованим контролером ПК у контурі позиціонування CM, надходить як керуючий вплив у контур позиціонування ВЗ. Запропонований спосіб регулювання положення ВЗ робить CAP інваріантною до стану гідравлічних виконавчих пристроїв, що дозволяє забезпечити стійкість сервомоторів без розгляду їхніх реальних силових характеристик. 4 UA 104504 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 1. Спосіб регулювання положення відсічного золотника, що керує переміщенням сервомотора, який у свою чергу керує клапанами парової турбіни в системі регулювання парової турбіни, з динамічною корекцією зміщення ″нуля″ відсічного золотника, який включає: визначення необхідної величини переміщення відсічного золотника для досягнення заданого положення сервомотора і переміщення відсічного золотника відповідно до раніше визначеного значення, який відрізняється тим, що на етапі визначення величини переміщення відсічного золотника до початку регулювання вимірюють значення зміщення ″нуля″ відсічного золотника в різних положеннях штока сервомотора в усьому діапазоні переміщення цього штока; а при регулюванні здійснюють розрахунок величини динамічної корекції зміщення ″нуля″ для заданого положення штока сервомотора з урахуванням зміщення ″нуля″, виміряного для поточного положення штока сервомотора, і величину переміщення відсічного золотника здійснюють відповідно до розрахованої величини динамічної корекції зміщення ″нуля». 2. Спосіб за п. 1, який відрізняється тим, що для регулювання положення відсічного золотника застосовують електромеханічний перетворювач, шток якого жорстко з'єднаний зі штоком відсічного золотника, утворюючи єдину ланку регулювання. 3. Спосіб за п. 1, який відрізняється тим, що при ручному вимірюванні зміщення ″нуля″ відсічного золотника примусово позиціонують сервомотор послідовно в кілька положень, і для кожного положення штока сервомотора визначають зміщення ″нуля″ відсічного золотника за індикацією відповідних датчиків положення. 4. Спосіб за п. 1, який відрізняється тим, що при вимірюванні зміщення ″нуля″ відсічного золотника з застосуванням програмованого контролера позиціонують сервомотор послідовно в кілька положень із заданим кроком, зазначений програмований контролер реєструє показання датчика положення, розташованого на штоку сервомотора, при наявності коливань сервомотора вимірює інтегральну складову відповідних коливань відсічного золотника до стабілізації сервомотора і реєструє зміщення ″нуля″ відсічного золотника з урахуванням цієї інтегральної складової. 5. Спосіб за п. 1, який відрізняється тим, що в системі автоматичного регулювання з резервуванням, яка містить більше одного каналу керування, вимірювання зміщень ″нуля″ відсічного золотника виконують окремо для кожного каналу. 6. Спосіб за п. 1, який відрізняється тим, що в системі автоматичного регулювання, яка містить більше одного сервомотора, вимірювання зміщень ″нуля″ відсічного золотника виконують окремо для кожного сервомотора. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of adjusting position of riding cutoff valve
Автори англійськоюKushbasov, Asylkhan Narimanovich, Dunaev, Vadim Igorevich, Fedosovsky, Mikhail Evgen'evich
Автори російськоюКушбасов Асылхан Нариманович, Дунаев Вадим Игоревич, Федосовский Михаил Евгеньевич
МПК / Мітки
МПК: F15B 13/00, F01D 17/00
Мітки: відсічного, регулювання, спосіб, положення, золотника
Код посилання
<a href="https://ua.patents.su/7-104504-sposib-regulyuvannya-polozhennya-vidsichnogo-zolotnika.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання положення відсічного золотника</a>
Спосіб регулювання положення електроприводу
Номер патенту: 28979
Опубліковано: 16.10.2000
Автори: Холодний Валерій Іванович, Поліванов Валентин Олексійович
МПК: G05B 19/18
Мітки: положення, електроприводу, спосіб, регулювання
Формула / Реферат:
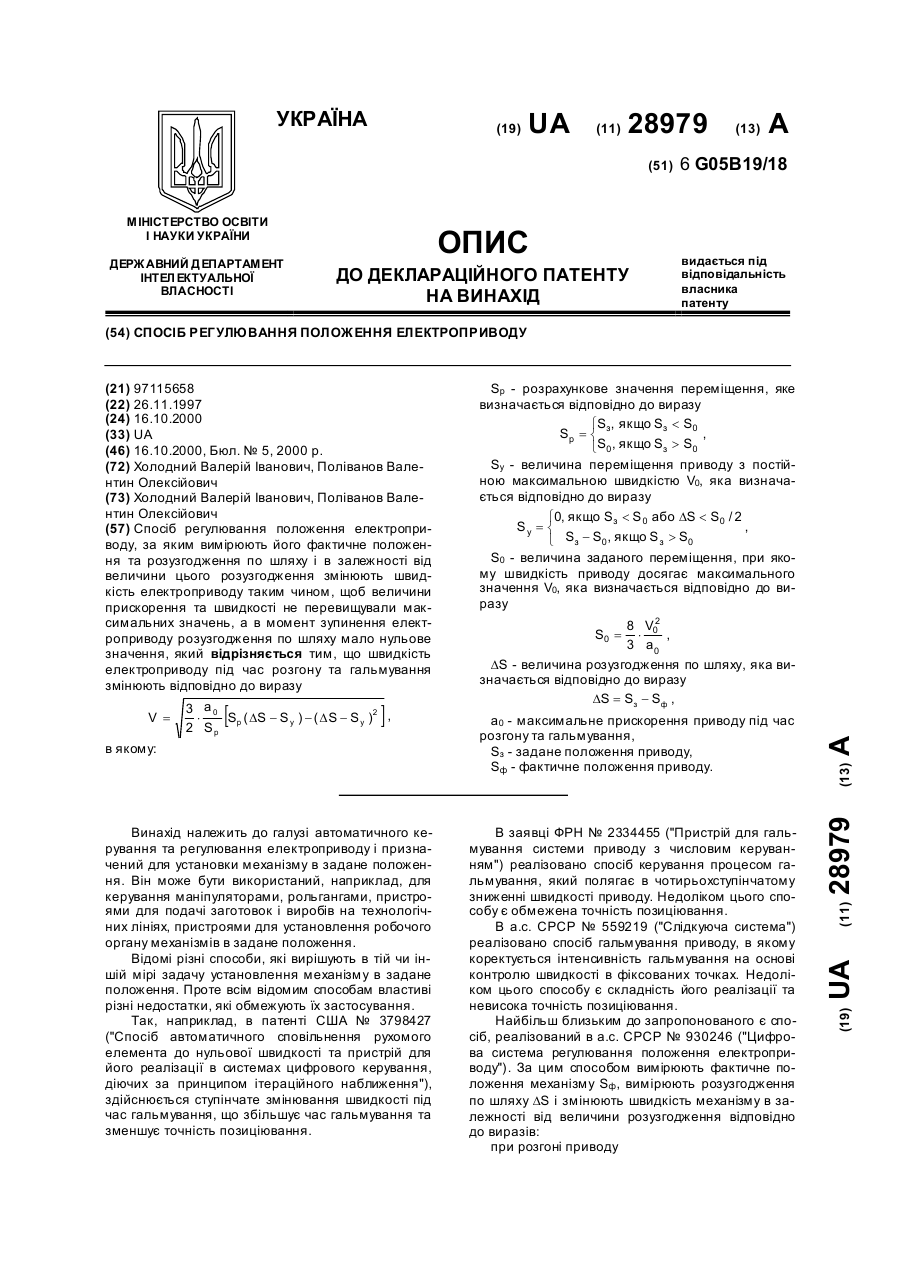
Спосіб регулювання положення електроприводу, за яким вимірюють його фактичне положення та розузгодження по шляху і в залежності від величини цього розузгодження змінюють швидкість електроприводу таким чином, щоб величини прискорення та швидкості не перевищували максимальних значень, а в момент зупинення електроприводу розузгодження по шляху мало нульове значення, який відрізняється тим, що швидкість електроприводу під час розгону та...
Штуцер відсічного вузла повітронагрівача
Номер патенту: 42082
Опубліковано: 25.06.2009
Автори: Ковтун Леонід Іванович, Ковтуненко Олексій Васильович, Науменко Олександр Сергійович, Сенькін Олександр Олексійович, Каревський Роман Петрович
МПК: C21B 9/06
Мітки: вузла, відсічного, штуцер, повітронагрівача
Формула / Реферат:
1. Штуцер відсічного вузла повітронагрівача, що містить корпус із внутрішньою цегляною футерівкою, на кінці якого закріплений водоохолоджуваний фланець, який відрізняється тим, що між внутрішньою цегляною футерівкою корпуса й основою водоохолоджуваного фланця закріплений амортизуючий шар, виконаний з азбестового шнура.2. Штуцер відсічного вузла повітронагрівача за п. 1, який відрізняється тим, що амортизуючий шар закріплений у районі...
Спосіб регулювання положення плуга по відношенню до трактора
Номер патенту: 49986
Опубліковано: 15.10.2002
Автори: Шквира Зінаїда Андріївна, Шквира Андрій Степанович, Левчук Микола Сидорович, Крохмаль Віктор Константинович, Мироненко Валентин Григорович, Масло Іван Павлович
МПК: A01B 63/111
Мітки: регулювання, плуга, положення, трактора, спосіб, відношенню
Формула / Реферат:
Спосіб регулювання положення плуга по відношенню до трактора, в якому вимірюють тиск на опорному колесі плуга і залежно від нього регулюють положення задніх та передніх шарнірів тяг механізму начіпки, за допомогою яких плуг кріпиться до трактора, який відрізняється тим, що додатково тиск вимірюють ще на одному опорному колесі плуга і положення шарнірів встановлюють таким, щоб виконувалось співвідношення:
Спосіб автоматичного виставляння, регулювання та безперервного контролю положення інструмента при нанесенні зображення на тверді поверхні
Номер патенту: 87522
Опубліковано: 27.07.2009
Автор: Магомедов Магомед Хабибович
МПК: B44B 3/00
Мітки: тверді, положення, виставляння, поверхні, інструмента, безперервного, контролю, зображення, регулювання, спосіб, нанесенні, автоматичного
Формула / Реферат:
Спосіб автоматичного виставляння, регулювання та безперервного контролю положення інструмента при нанесенні зображення на тверді поверхні, який передбачає передачу сигналу за допомогою блока керування на привід вертикального руху, сполучений з електромагнітною машиною, інструментом та поверхнею, що обробляється, та здійснення зворотного зв'язку між електромагнітною машиною та блоком керування, який відрізняється тим, що сигнал з виходу ротора...
Система регулювання положення корпусу транспортного засобу
Номер патенту: 37869
Опубліковано: 10.12.2008
Автори: Дущенко Владислав Васильович, Щербина Олег Олексійович
МПК: B60G 17/015
Мітки: транспортного, засобу, корпусу, система, регулювання, положення
Формула / Реферат:
Система регулювання положення корпусу транспортного засобу, до складу якої входять важіль (балансир) колеса (катка), торсіон, рухлива муфта, привід повороту рухливої муфти, яка відрізняється тим, що привід повороту рухливої муфти виконано у вигляді пружини, виготовленої з матеріалу з ефектом "пам'яті" форми, закріпленої одним кінцем до корпусу транспортного засобу, іншим кінцем - до рухливої муфти.
Попередній патент: Спосіб нарізання циліндричних зубчастих коліс з криволінійними по довжині зубцями
Наступний патент: Спосіб одержання просоченого феромоном гранулята
Випадковий патент: Склад шихти для виготовлення si3n4 кераміки