Захват крокуючого робота
Номер патенту: 117979
Опубліковано: 10.07.2017
Автори: Поліщук Михайло Миколайович, Пасько Віктор Петрович, Ткач Михайло Мартинович

Формула / Реферат
1. Захват крокуючого робота, що містить еластичну камеру, гофровані оболонки, джерела вакууму й надлишкового тиску, який відрізняється тим, що захват оснащений гострими зачепами, установленими зі спіральною пружиною на останній ланці кожного гофрованого трубопроводу, причому порожнини вакууму й надлишкового тиску зв'язані сильфоном зі зворотним клапаном.
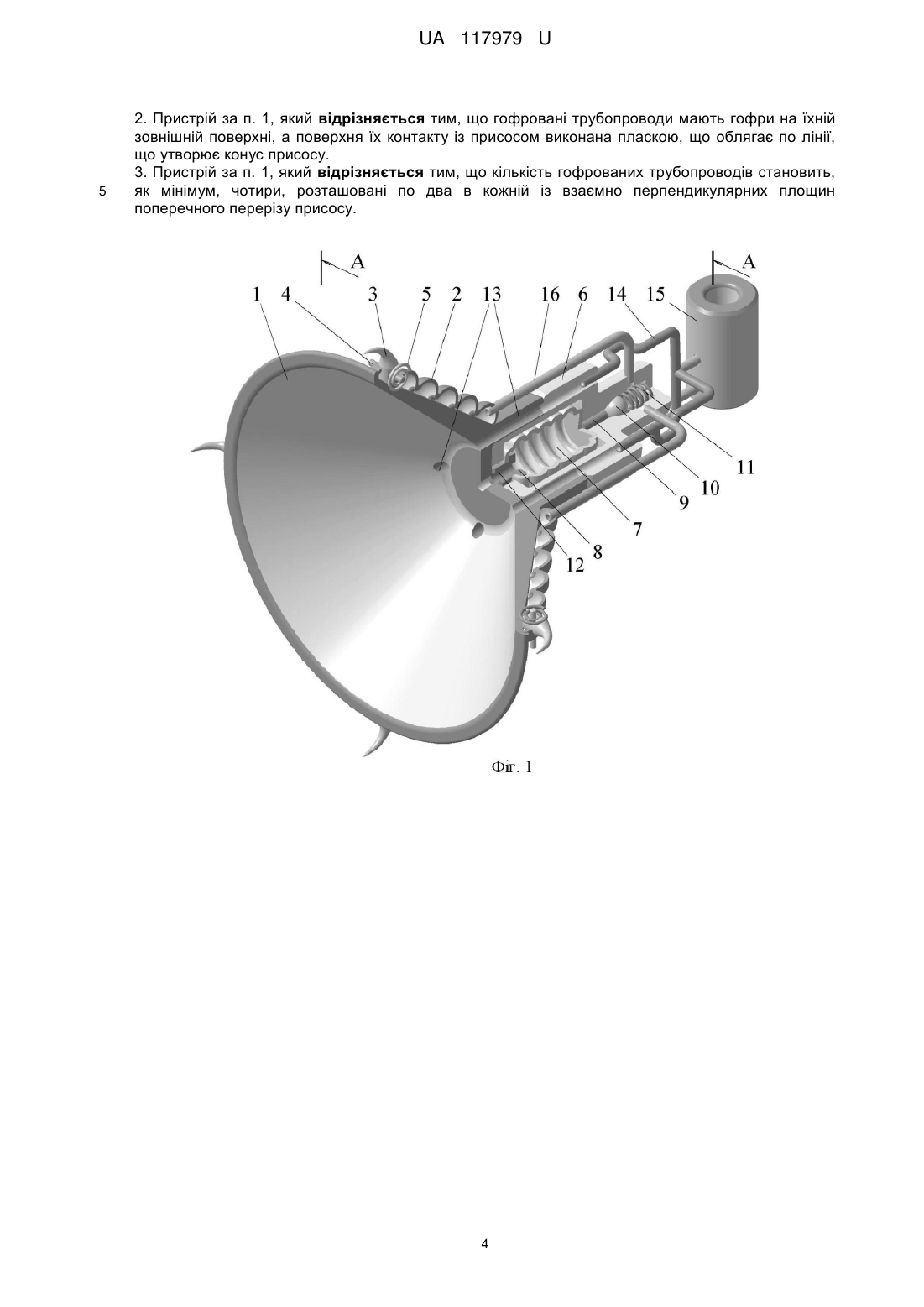
2. Пристрій за п. 1, який відрізняється тим, що гофровані трубопроводи мають гофри на їхній зовнішній поверхні, а поверхня їх контакту із присосом виконана пласкою, що облягає по лінії, що утворює конус присосу.
3. Пристрій за п. 1, який відрізняється тим, що кількість гофрованих трубопроводів становить, як мінімум, чотири, розташовані по два в кожній із взаємно перпендикулярних площин поперечного перерізу присосу.
Текст
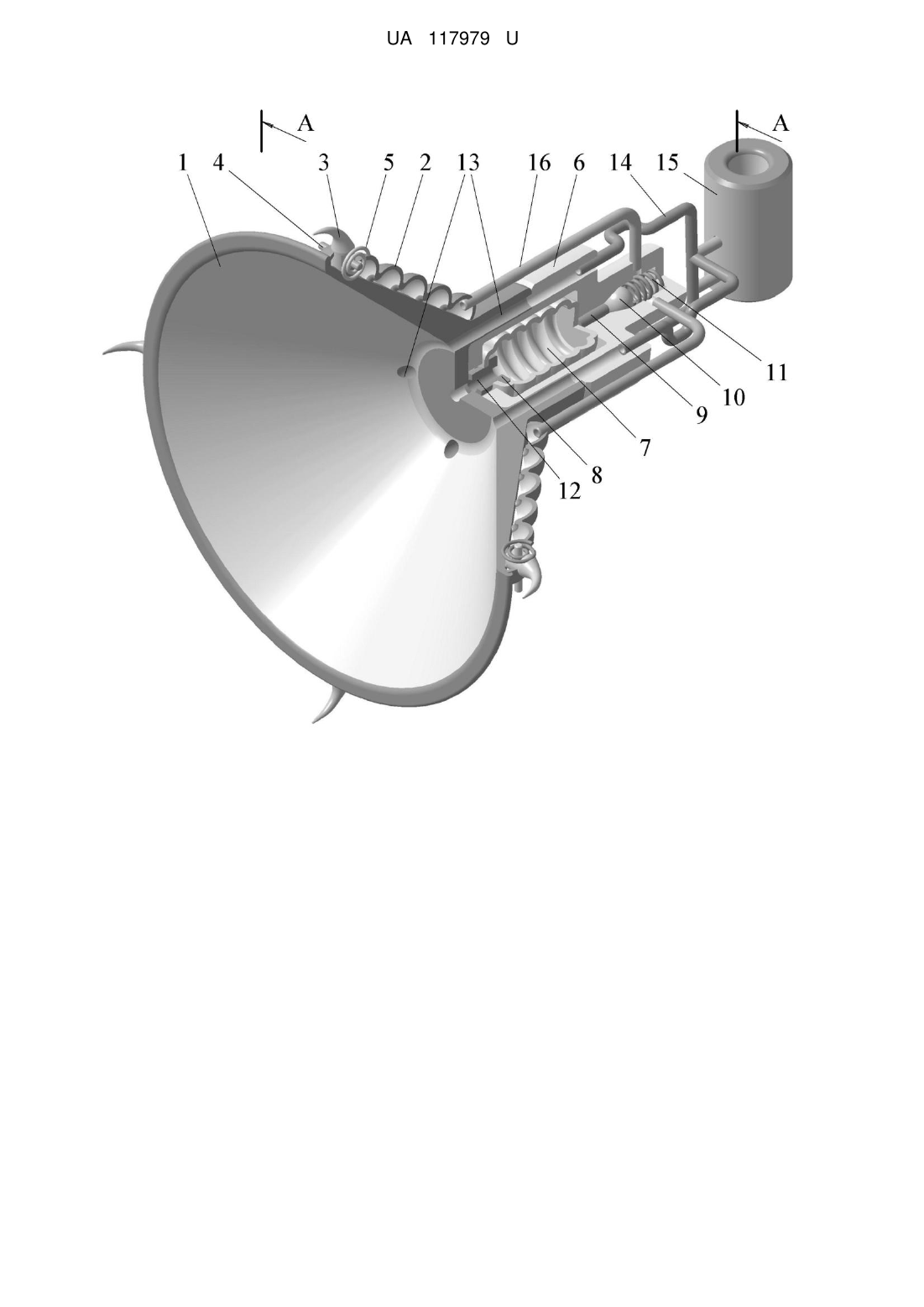
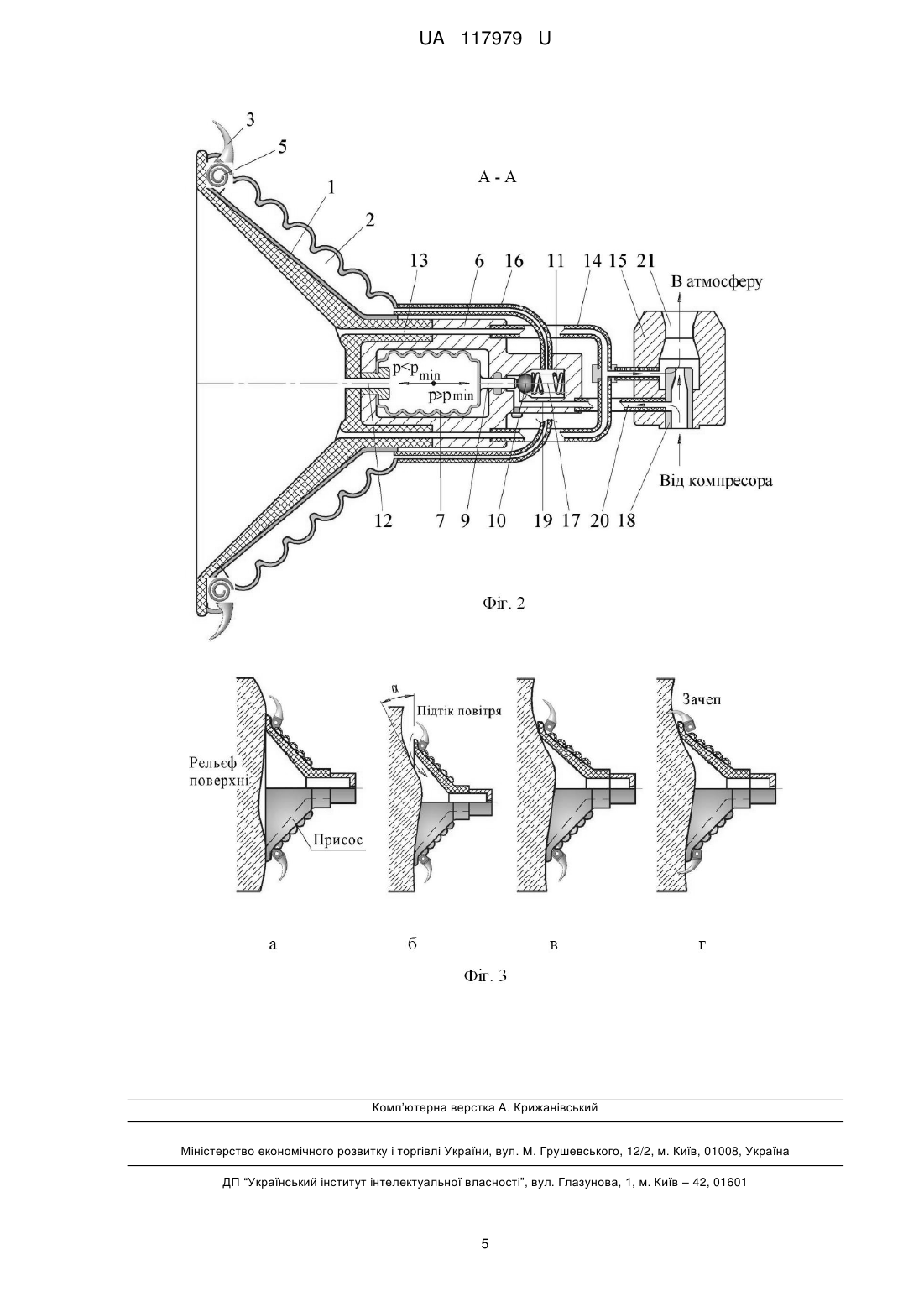
Реферат: Захват крокуючого робота містить еластичну камеру, гофровані оболонки, джерела вакууму й надлишкового тиску. Захват оснащений гострими зачепами, установленими зі спіральною пружиною на останній ланці кожного гофрованого трубопроводу, причому порожнини вакууму й надлишкового тиску зв'язані сильфоном зі зворотним клапаном. UA 117979 U (12) UA 117979 U UA 117979 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі робототехніки, а саме до створення захоплюючих пристроїв мобільних роботів для пересування по довільних поверхнях будь-якої орієнтації в просторі, й може бути використана для виконання транспортних та вантажних операцій. Відомий вакуумний захват [1], що містить сопло із плоским торцем і опори, висота кожної з яких і їх діаметри зв'язані певними чисельними значеннями, завдяки яким захват має підвищену вантажопідйомність. Однак необхідність підтримки певного співвідношення зазору між пласким торцем захвата й поверхнею контакту з його діаметром не забезпечує належної надійності при зчепленні захвата з поверхнею довільної топології, що і є його суттєвим недоліком. Відомий пристрій для фіксації об'єкта на опорній поверхні [2], що містить фіксуючий елемент (точніше, вакуумний захват), з'єднаний з корпусом, у якому розміщені спеціальний штир і його пневматичний привод. Зазначеним штирем здійснюється відрив фіксуючого елемента від поверхні контакту й, тим самим, здійснюється контроль надійності фіксації транспортного засобу. Даний пристрій, маючи здатність контролю, не забезпечує у разі необхідності збільшення сили зчеплення з поверхнею переміщення будь-якого транспортного засобу, у тому числі й мобільного робота, що обмежує його застосування з урахуванням надійності втримання транспортного засобу при переміщенні по довільно орієнтованих у просторі поверхнях. Відомий захоплюючий пристрій [3], що містить фіксуючий елемент у вигляді кінематично зв'язаних між собою вакуумних присосів і механічних захватів, оснащених відповідними пневматичними приводами. Зазначені механічні захвати виконані у вигляді підпружних “… накладок” зубчастої форми, що попереджають проковзування транспортного засобу на зволожених поверхнях з нерівностями. Оскільки усунення тільки проковзування фіксуючих елементів транспортного засобу не достатньо для його надійного втримання на поверхні переміщення, а необхідно ще й посилення власне зчеплення захватів з поверхнею, то даний пристрій не забезпечує належної надійності втримання транспортних засобів при їхнім переміщенні по довільно орієнтованих поверхнях (у тому числі й по вертикальних). Крім цього вакуумні присоси даного захоплюючого пристрою не забезпечують адаптацію до топології поверхні переміщення, що в сукупності і є його суттєвими недоліками. У відомому вакуумному захоплюючому органі [4], що містить еластичну капілярну структуру, з'єднану із джерелом стисненого повітря, мембрану, герметичні канали з рідиною й диференціальний вимірювач тиску, усунутий останній недолік попереднього пристрою [3]. Даний захоплюючий орган за рахунок еластичної капілярної структури дозволяє здійснювати його адаптацію до різної топології поверхні переміщення. Адаптація до нерівностей поверхні переміщення сприяє зменшенню підтоку повітря у вакуумний захоплюючий орган. Однак дане технічне рішення не здатне радикально збільшувати зусилля зчеплення при виникненні аварійних ситуацій - коли глибини вакууму в захваті вже не досить для втримання мобільного робота (або іншого транспортного засобу) на поверхні переміщення довільної орієнтації (вертикальної або з великим ухилом). Відсутність зазначеної якості й становить його суттєвий недолік. Найближчим аналогом до пристрою, що заявляється, є комбінований захват [5 (рис. 4.7, е)], що містить гофровану оболонку, еластичну камеру вакуумного захвату, що деформується та охоплює криволінійну поверхню виробу. У даному пристрої використовується одночасно й нагнітання повітря й розрідження. Завдяки такому технічному рішенню вакуумний захват адаптується до криволінійної поверхні (у цьому випадку циліндричної). Загальними ознаками із пристроєм-найближчим аналогом є наявність гофрованої оболонки, еластичної камери вакуумного захвату, джерел вакууму й надлишкового тиску. Однак у випадку підтоку повітря з атмосфери в еластичну камеру даний захват втрачає здатність утримувати об'єкт маніпулювання або транспортний засіб на поверхні переміщення. Зазначений негативний ефект має місце при контакті захвата з поверхнею з більшими перепадами нерівностей, наприклад відмінної від циліндричної поверхні. Відсутність можливості збільшити силу зчеплення при аварійних ситуаціях є суттєвим недоліком наведеного технічного рішення, тому що не забезпечує належної надійності його роботи. Крім цього у даному пристрої відсутній взаємозв'язок станів порожнин вакууму й надлишкового тиску, що також знижує надійність його роботи. Задачею корисної моделі є підвищення надійності зчеплення захвата крокуючого робота з довільною як по топології, так і по орієнтації поверхнею його переміщення. Задача вирішується тим, що пристрій, який заявляється, - захват крокуючого робота, що містить гофровані оболонки, еластичну камеру захвата, джерела вакууму й надлишкового тиску, згідно з корисною моделлю, оснащений гострими зачепами, установленими зі спіральною пружиною на останній ланці кожного гофрованого трубопроводу, причому порожнини вакууму й надлишкового тиску зв'язані сильфоном зі зворотним клапаном. Крім цього самі трубопроводи 1 UA 117979 U 5 10 15 20 25 30 35 40 45 50 55 60 мають гофри на їхній зовнішній поверхні, а поверхня їх контакту із присосом виконана пласкою, що облягає по лінії, утворюючій конус присосу. Кількість гофрованих трубопроводів становить, як мінімум, чотири, розташовані по два в кожній із взаємно перпендикулярних площинах поперечного перерізу присосу. Приведені ознаки корисної моделі є суттєвими, бо в сукупності достатні для рішення поставленої задачі - підвищення надійності функціонування захвата за рахунок оснащення його додатковими механічними зачепами й зв'язком між порожнинами вакууму й надлишкового тиску за допомогою сильфона зі зворотним клапаном. Кожна із наведених ознак нарізно необхідна для ідентифікації і відмінностей пристрою, що заявляється, від відомих в техніці аналогічних технічних рішень. Таким чином, нова сукупність загальних (відомих) і відмітних (нових) від найближчого аналога суттєвих ознак, якими характеризується нове технічне рішення, є достатньою у всіх випадках, на які розповсюджується об'єм правового захисту, оскільки вирішує поставлені задачі. Причинно-наслідковий зв'язок між сукупністю суттєвих ознак і результатом, що досягається полягає в наступному. Завдяки тому, що захват крокуючого робота оснащений гострими зачепами, установленими на останній ланці кожного гофрованого трубопроводу, а порожнини вакууму й надлишкового тиску зв'язані сильфоном зі зворотним клапаном, представляється можливим при підтоку повітря в присос із атмосфери, у випадку більших нерівностей на поверхні переміщення робота, здійснювати не тільки посилений притиск присосу до зазначеної поверхні, але й додаткове зчеплення захвата з поверхнею переміщення довільної орієнтації й топології. Сукупність перерахованих конструктивних відмінностей сприяє посиленню зчеплення захвата крокуючого робота з поверхнею переміщення, а значить збільшенню надійності його роботи. Пристрій пояснюється наступними кресленнями: на фіг. 1 показано 3D модель захвата крокуючого робота в перерізі 1/4 обсягу; на фіг. 2-2D переріз по А-А на фіг. 1; на фіг. 3 положення присосу при різних станах контакту з поверхнею переміщення (із зображенням "переріз-вид"). Захват крокуючого робота містить вакуумний присос 1 (фіг. 1), на якому по лінії, утворюючій конус, встановлені гофровані трубопроводи 2 з гострими зачепами 3, розміщеними на осях 4 зі спіральними пружинами 5. Присос 1 закріплено на корпусі 6, усередині якого встановлений сильфон 7, лівий торець якого прикріплений втулкою 8 до корпуса 6, а правий за допомогою штока 9 пов'язаний з кулькою 10 і пружиною 11, що утворюють зворотний клапан. Через канал 12 сильфон 7 пов'язаний із внутрішньою (вакуумною) порожниною присосу 1, яка, у свою чергу, за допомогою каналів 13 і трубопроводів 14 з'єднана із джерелом розрядження (вакууму) ежектором 15. Внутрішні порожнини гофрованих трубопроводів 2 через трубопроводи 16 з'єднано з порожниною 17 (фіг. 2) зворотного клапана. Ежектор 15 містить сопло 18, через яке подається стиснене повітря від компресора (на фіг. 2 не показаний) у канал 19 через трубопровід 20 і одночасно в колектор 21, що має, як показано на кресленні, змінний переріз. Пристрій працює наступним чином. На фіг. 1 і фіг. 3 (а) зображене вихідне положення захвата, коли присос 1 щільно облягає свою дільницю поверхні, по якій переміщається крокуючий робот. При цьому відсутній підтік повітря з атмосфери, тобто захват працює в режимі стандартного вакуумного захвата. А саме: стиснене повітря від компресора подається в сопло 18 і внаслідок змінного перерізу колектора 21, в останньому створюється зона розрядження, яка будучи з'єднана трубопроводом 14 через канал 13 з присосом 1, створює під ним зону вакууму. Оскільки сильфон 7 через канал 12 з'єднаний з областю вакууму, то при значенні вакууму p
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: захват, робота, крокуючого
Код посилання
<a href="https://ua.patents.su/7-117979-zakhvat-krokuyuchogo-robota.html" target="_blank" rel="follow" title="База патентів України">Захват крокуючого робота</a>
Спосіб переміщення педіпуляторів крокуючого робота і пристрій для його здійснення

Номер патенту: 111021
Опубліковано: 10.03.2016
Автори: Ямпольський Леонід Стефанович, Персиков Владислав Костянтинович, Поліщук Михайло Миколайович
МПК: B25J 11/00, B62D 57/032
Мітки: робота, переміщення, крокуючого, педіпуляторів, здійснення, спосіб, пристрій
Захват для дрібноштучних пакетів
Номер патенту: 40197
Опубліковано: 16.07.2001
Автор: Коломієць Володимир Михайлович
МПК: B66C 1/22
Мітки: пакетів, захват, дрібноштучних
Формула / Реферат:
Захват для дрібноштучних пакетів, який містить раму з закріпленими на ній огороджувальною стінкою, вантажозахватні петлі, підхватні штирі, який відрізняється тим, що до рами шарнірно приєднані висувні пальці, на які підвішується запобіжний кошик з різними за висотою стінками, при цьому огороджувальна стінка захвата забезпечена П-образними виступами.
Кліщовий захват для транспортування вантажів, переважно злитків і виковків циліндричної форми
Номер патенту: 61541
Опубліковано: 25.07.2011
Автори: Ратій Сергій Григорийович, Ісакова Анна Миколаївна, Кашанський Дмитро Анатолійович
МПК: B66C 1/58
Мітки: переважно, захват, циліндричної, вантажів, форми, виковків, злитків, транспортування, кліщовий
Формула / Реферат:
Кліщовий захват для транспортування вантажів, переважно злитків і виковків циліндричної форми, що містить траверсу з підхоплювачами і щонайменше одну пару кліщовин у вигляді двоплечих важелів, шарнірно з'єднаних між собою в центральній частині і кінематично зв'язаних з траверсою за допомогою тяг, який відрізняється тим, що він оснащений жорстко закріпленою планкою і шарнірно встановленим скидачем, а також взаємодіючим з ним штовхачем,...
Вакуумний захват

Номер патенту: 44082
Опубліковано: 15.01.2002
Автори: Драпак Георгій Мефодійович, Васьков Віктор Михайлович, Скиба Микола Єгорович
МПК: B66C 1/00, A43D 11/00
Формула / Реферат:
Вакуумний захват, який містить корпус, керуючий елемент, встановлений з можливістю переміщення, та захватну плиту, який відрізняється тим, що керуючий елемент виконано у вигляді жорсткого гнутого стрижня, оснащеного всередині отвором, що починається до його згину, з можливістю послідовного з'єднання отворів захватної плити з джерелом вакууму, а захватна плита виконана з можливістю деформування.
Штирьовий захват до навантажувача
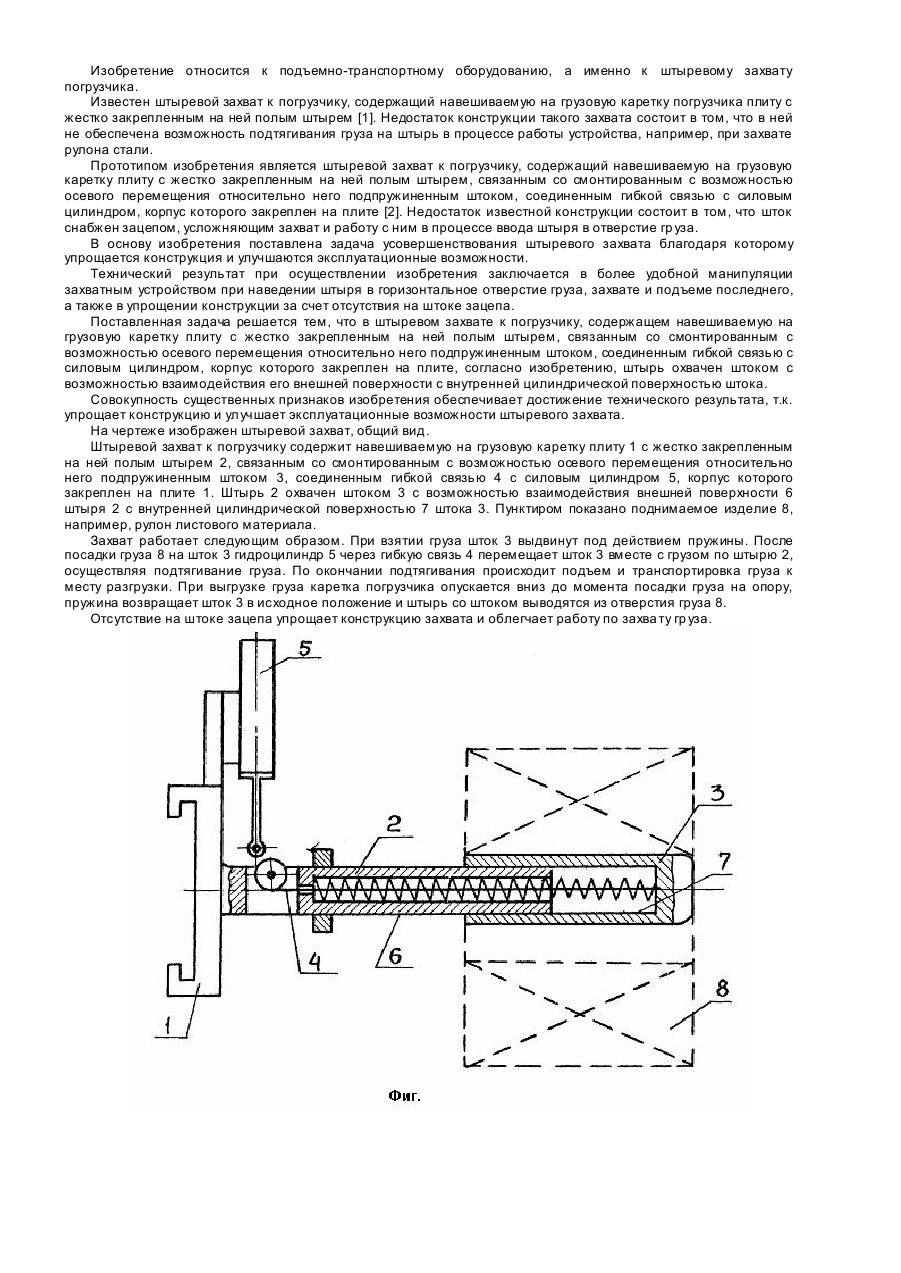
Номер патенту: 3759
Опубліковано: 27.12.1994
Автор: Рахманов Микола Миколайович
МПК: B66F 9/18
Мітки: штирьовий, навантажувача, захват
Формула / Реферат:
Штыревой захват к погрузчику, содержащий навешиваемую на грузовую каретку плиту с жестко закрепленным на ней полым штырем, связанным со смонтированным с возможностью осевого перемещения относительно него подпружиненным штоком, соединенным гибкой связью с силовым цилиндром, корпус которого закреплен на плите, отличающийся тем, что штырь охвачен указанным штоком с возможностью взаимодействия его внешней поверхности с внутренней цилиндрической...
Попередній патент: Спосіб діагностики діабетичної нефропатії у дітей, хворих на цукровий діабет
Наступний патент: Застосування тетраамідокалікс[4]аренів з фармакофорними групами 2,4-дихлорбензойної кислоти як засобу з аналгетичною активністю
Випадковий патент: Датчик