Складальний модуль маніпулятора

Формула / Реферат
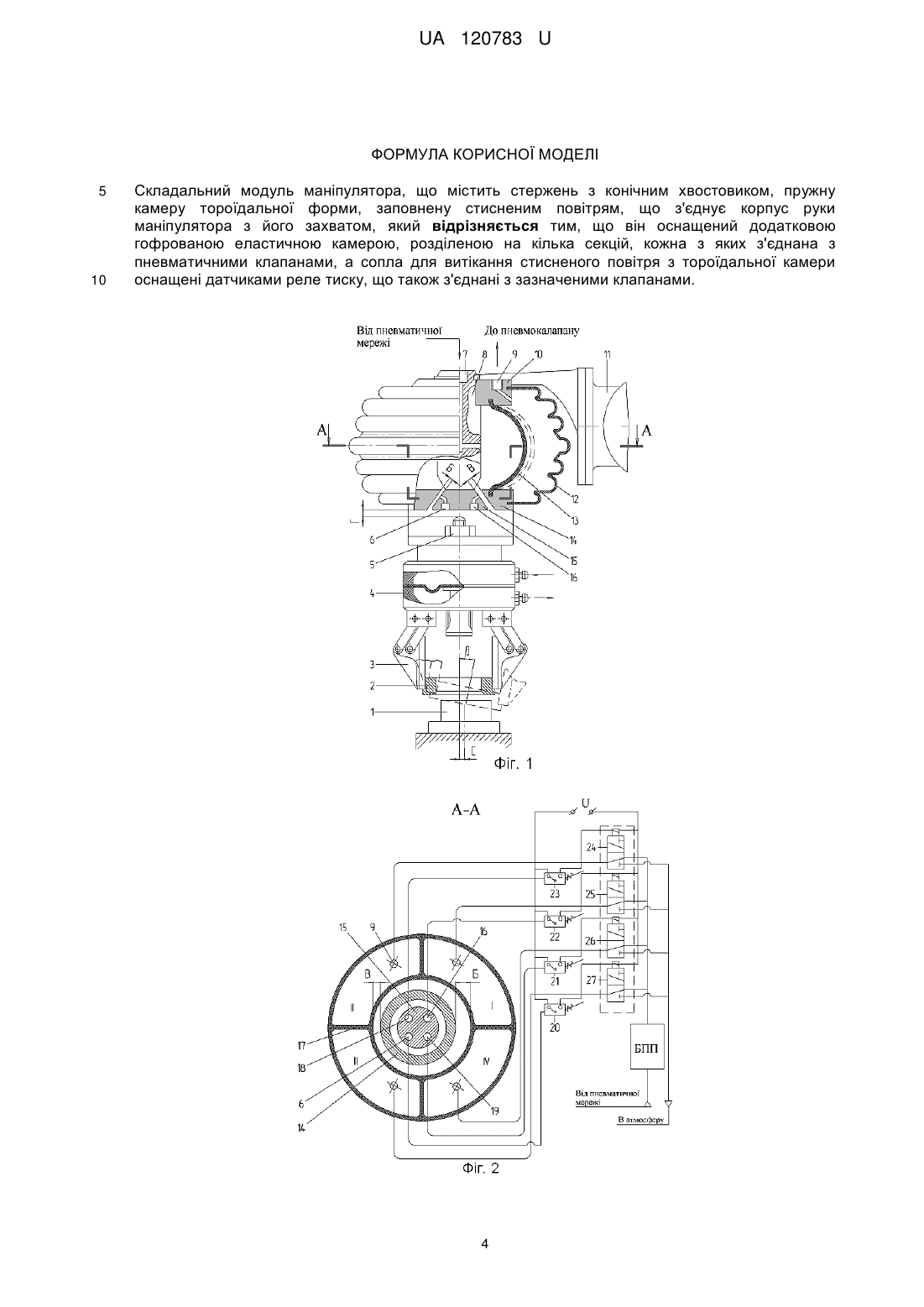
Складальний модуль маніпулятора, що містить стержень з конічним хвостовиком, пружну камеру тороїдальної форми, заповнену стисненим повітрям, що з'єднує корпус руки маніпулятора з його захватом, який відрізняється тим, що він оснащений додатковою гофрованою еластичною камерою, розділеною на кілька секцій, кожна з яких з'єднана з пневматичними клапанами, а сопла для витікання стисненого повітря з тороїдальної камери оснащені датчиками реле тиску, що також з'єднані з зазначеними клапанами.
Текст
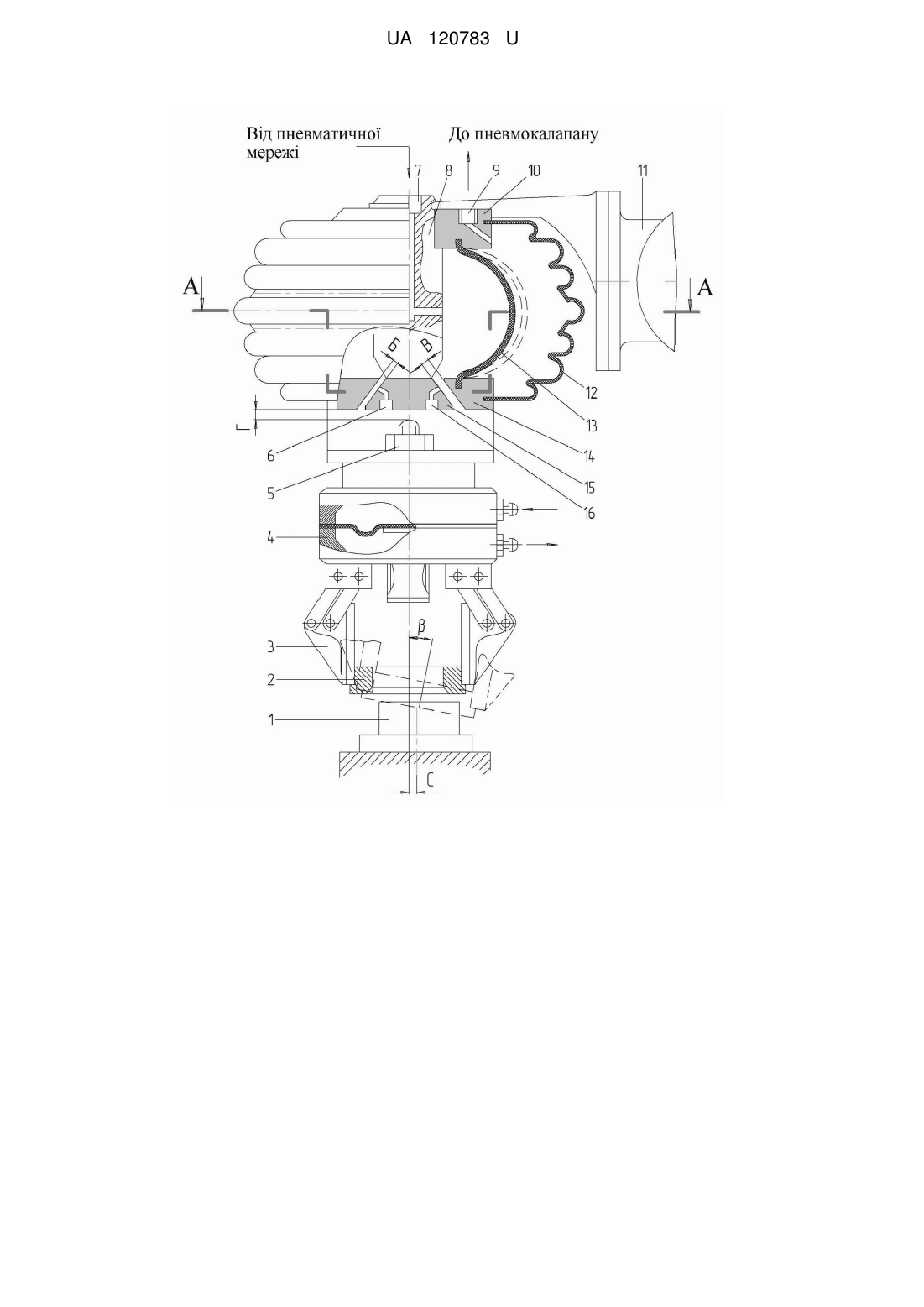
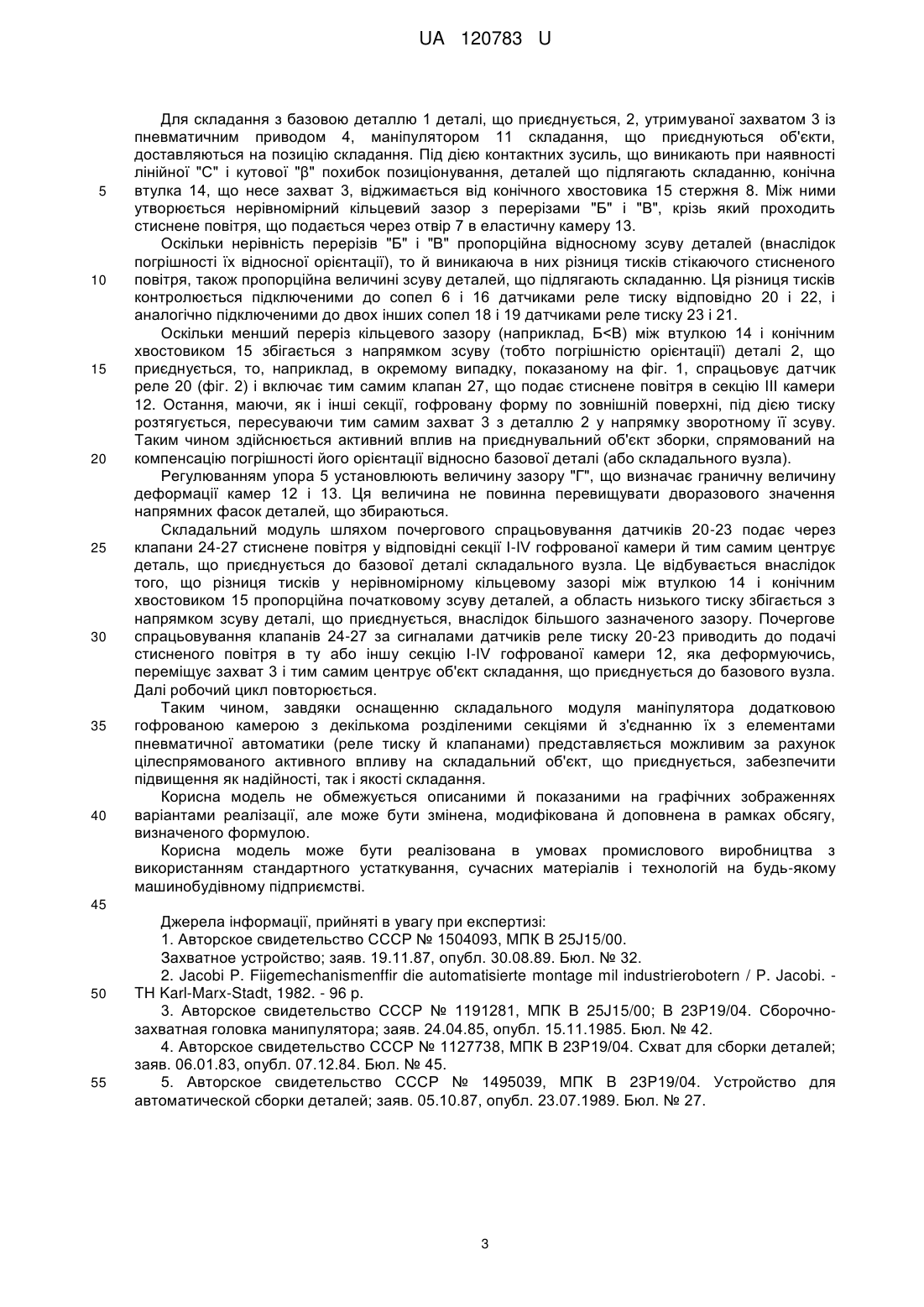
Реферат: Складальний модуль маніпулятора містить стержень з конічним хвостовиком, пружну камеру тороїдальної форми, заповнену стисненим повітрям, що з'єднує корпус руки маніпулятора з його захватом, крім того він оснащений додатковою гофрованою еластичною камерою, розділеною на кілька секцій, кожна з яких з'єднана з пневматичними клапанами, а сопла для витікання стисненого повітря з тороїдальної камери оснащені датчиками реле тиску, що також з'єднані з зазначеними клапанами. UA 120783 U (54) СКЛАДАЛЬНИЙ МОДУЛЬ МАНІПУЛЯТОРА UA 120783 U UA 120783 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до машинобудування, а саме до промислових роботів і маніпуляторів, призначених для складання деталей. Відомий захватний пристрій [1], що містить корпус із підпружиненим штоком, засобами центрування деталей, що збираються, захватні важелі, шарнірно встановлені на рухливому елементі й взаємодіючі з поверхнею у вигляді копіра. Наявність у зазначеному пристрої засобів центрування об'єкта складання дозволяє підвищити продуктивність складального процесу. Однак жорсткий механічний зв'язок елементів, що центрують, між об'єктом складання й корпусом захвату маніпулятора не виключає пошкодження деталей, що збираються, у випадку їх відносного заклинювання при виконанні високоточного з'єднання (із зазорами в межах 5…20 мкм). Крім того, відсутність засобів активного впливу на один з об'єктів складання не дозволяє вивести його зі стану заклинювання, що знижує надійність складання. Відомий складальний пристрій для промислового робота [2] з, так званим, віддаленим центром піддатливості пружних елементів, що з'єднують захват маніпулятора з його корпусом. На відміну від попереднього технічного рішення, у даному пристрої усунутий жорсткий зв'язок між захватом і маніпулятором, а перетинання осей пружних елементів на торці деталі, що приєднується маніпулятором, дозволяє мінімізувати зусилля складання, тим самим підвищуючи якість складання високоточних з'єднань. Однак відсутність засобів активного впливу на один із об'єктів, що підлягають складанню, так само як і в попередньому випадку, не забезпечує необхідної надійності складання у випадку заклинювання деталей, що збираються, при значній погрішності їх відносної орієнтації, що є суттєвим недоліком. У відомій складально-захватній головці маніпулятора [3], на відміну від попередніх технічних рішень, є засоби активного впливу на об'єкт, що приєднується маніпулятором до складального вузла. Зазначені засоби містять електромагнітний вібратор із пружними елементами у вигляді плоскопаралельних пружин, електропривод обертання останніх, чутливі елементи, пристрій контролю кута перекосу деталей, що збираються, і автоматичну систему керування. Сукупність перерахованих елементів дозволяє підвищити як продуктивність, так і надійність складання за рахунок вібраційного впливу на об'єкт складання. Однак, як відомо, вібрації викликають зіткнення (удари) поверхонь, що сполучаються, і у випадку їх високої чистоти (тобто середньої шорсткості менше 0,04…0,08 мкм - стан дзеркальної або полірованої поверхні), а також у разі невисокої їх міцності, зазначений активний вплив приводить до пошкодження поверхонь деталей, що сполучаються. У підсумку не забезпечується необхідна якість з'єднання деталей, що збираються, що є суттєвим недоліком наведеного аналога. Відомий схват для складання деталей [4], установлений на хитній платформі, що підпружинена пласкою у вигляді пелюсток пружиною й з'єднаний з нерухливим корпусом за допомогою сильфонів, куди подається стиснене повітря, що витікає через сопла між двома платформами. Завдяки різниці тисків у сильфонах, що виникає при перекосі об'єкта складання, сильфони деформуються й тим самим центрують деталь, що приєднується. Однак, як відомо, величина деформації сильфонів (тобто герметичних металевих гофрованих циліндрів) дуже мала, принаймні у кілька раз менше розмірів напрямних фасок об'єктів складання. Це означає, що з появою погрішностей орієнтації об'єктів складання, порівнянних з розмірами фасок, об'єкта, що приєднується, компенсація погрішностей позиціонування об'єкта складання не гарантується, тобто не забезпечується достатня надійність складання, що і є істотним недоліком наведеного пристрою. Крім того, у даному пристрої процес центрування носить стохастичний (випадковий) характер, тому що в пристрої відсутні засобу цілеспрямованого активного впливу на один з об'єктів складання, що збільшує зазначений вище недолік. Найбільш близьким аналогом (прототипом) по сукупності ознак є пристрій [5], що містить корпус зі стержнем, у якому виконані канали для подачі стисненого повітря, схват і замкнену кільцеву камеру із пружного матеріалу, причому зазначена камера має тороїдальну форму. Загальними ознаками із пристроєм-прототипом є наявність кільцевої камери із пружного матеріалу, що має тороїдальну форму, стрижня з конічним хвостовиком та каналами для подачі й витікання стисненого повітря. Наявність у зазначеному пристрої еластичної камери тороїдальної форми дозволяє при витіканні з неї стисненого повітря, що створює динамічний напір, здійснювати компенсацію погрішностей відносної орієнтації об'єкта складання, що приєднується маніпулятором. Однак, внаслідок того, що зазначена камера позбавлена будь-яких елементів керування, спрямованого на компенсацію погрішностей орієнтації об'єктів, що збираються, процес складання носить стохастичний (випадковий) характер, що є істотним недоліком пристроюпрототипу. Це доводиться тим, що у випадку заклинювання деталей, що збираються, і при 1 UA 120783 U 5 10 15 20 25 30 35 40 45 50 55 відсутності будь-якого активного впливу на деталь, що приєднується, не забезпечується необхідна надійність процесу складання. Крім того, відсутність цілеспрямованого активного впливу на об'єкт складання, що приєднується маніпулятором, сповільнює процес сполучення деталей, і тому знижує його продуктивність, що є додатковим недоліком зазначеного пристрою. Задачею є підвищення надійності й продуктивності складального модуля маніпулятора при одночасному виключенні можливості ушкодження поверхонь, що сполучаються, тобто забезпечення якості складання. Поставлена задача вирішується тим, що пристрій, який містить пружну камеру тороїдальної форми, заповнену стисненим повітрям, що з'єднує корпус руки маніпулятора з його захватом, оснащений додатковою гофрованою еластичною камерою, співвісною відносно камери тороїдальної форми та розділеною на кілька секцій, кожна з яких з'єднана з елементами пневмоавтоматики (наприклад, пневматичними клапанами з електромагнітними керуванням), а сопла для витікання стисненого повітря з тороїдальної камери оснащені датчиками реле тиску, також з'єднаними із зазначеними клапанами. Наведені ознаки є суттєвими, бо в сукупності достатні для вирішення поставлених задач підвищення надійності й продуктивності складального модуля маніпулятора при одночасному виключенні можливості ушкодження поверхонь, що сполучають, тобто забезпечення якості збирання, а кожний нарізно необхідний для ідентифікації і відмітності пристрою, що заявляється, від відомих в техніці аналогічних технічних рішень. Таким чином, нова сукупність загальних (відомих) і відмітних (нових) від прототипу суттєвих ознак, якими характеризується новий пристрій, є достатньою у всіх випадках, на які розповсюджується об'єм правового захисту, оскільки вирішує поставлені задачі. Причинно-наслідковий зв'язок між сукупністю суттєвих ознак і результатом, що досягається, полягає в наступному. Оснащення пристрою додатковою гофрованою еластичною камерою, розділеною на окремі секції, дозволяє в результаті подачі стисненого повітря в будь-яку із зазначених секцій здійснювати зсув (переміщення) об'єкта складання в напрямку компенсації погрішності його відносної орієнтації. Ця відмітна ознака підвищує надійність роботи пристрою, тому що характеризує наявність активного впливу на об'єкт, що приєднується маніпулятором, складання. Крім того, оснащення сопел для витікання стисненого повітря датчиками реле тиску, що визначають різницю тисків у зазначених вище секціях гофрованої камери, дозволяє підвищити продуктивність процесу складання за рахунок того, що різниця тисків у секціях еластичної камери визначає напрямок зсуву об'єкта складання, що приєднується. Цей зсув компенсує погрішність відносної орієнтації деталей, що збираються. Таким чином складальний модуль маніпулятора, що заявляється, має здатність (у силу зазначених вище відмітних ознак) активного впливу на об'єкт складання й визначення напрямку цього впливу, що дозволяє підвищити як надійність його роботи, так і його продуктивність, внаслідок скорочення часу сполучення об'єктів складання. На фіг. 1 зображена конструкція пристрою, на фіг. 2 - поперечний переріз А-А на фіг. 1, сполучений із пневматичною схемою системи керування пристроєм. Пристрій виконаний у вигляді складального модуля, для автоматизованого складання базової деталі 1 й деталі 2, що приєднується (фіг. 1). Останню розміщено в захваті 3, оснащеному пневматичним приводом 4 з регульованим упором 5 щодо стержня 8, установленого в корпусі 10, нерухомо закріпленому на кисті маніпулятора 11. Стержень 8 має конічний хвостовик 15 із соплами 6 і 16 для витікання стиснутого повітря з пружної тороїдальної камери 13, закріпленої верхнім краєм у корпусі 10, а нижнім краєм - у конічній втулці 14. В стержні 8 виконаний канал 7 для подачі стисненого повітря в камеру 13, а в корпусі 10 є отвір 9 для подачі стисненого повітря в гофровану камеру 12, співвісну відносно камери тороїдальної форми. Остання має герметичні секції I-IV (фіг. 2), кожна з яких утворена гнучкими перегородками 17 і з'єднана через відповідні отвори 9 із клапанами 24-27. Живлення клапанів здійснюється від пневматичної мережі через блок підготовки повітря (БПП), а вихлоп стисненого повітря здійснюється в атмосферу. Крім того, сопла 6 і 16 з'єднані з датчиками реле тиску 20 і 22, відповідно. Аналогічно два інші сопла 18 і 19 (що також як і попередні виконані у хвостовику 15) підключені датчики реле тиску 23 і 21, відповідно. Причому, кожний з датчиків 20-23 підключений до електромагнітних пневматичних клапанів 24-27, як це показане на схемі фіг. 2. Електроживлення зазначених елементів автоматики здійснюється від джерела "U". Пристрій працює наступним чином. 2 UA 120783 U 5 10 15 20 25 30 35 40 Для складання з базовою деталлю 1 деталі, що приєднується, 2, утримуваної захватом 3 із пневматичним приводом 4, маніпулятором 11 складання, що приєднуються об'єкти, доставляються на позицію складання. Під дією контактних зусиль, що виникають при наявності лінійної "С" і кутової "β" похибок позиціонування, деталей що підлягають складанню, конічна втулка 14, що несе захват 3, віджимається від конічного хвостовика 15 стержня 8. Між ними утворюється нерівномірний кільцевий зазор з перерізами "Б" і "В", крізь який проходить стиснене повітря, що подається через отвір 7 в еластичну камеру 13. Оскільки нерівність перерізів "Б" і "В" пропорційна відносному зсуву деталей (внаслідок погрішності їх відносної орієнтації), то й виникаюча в них різниця тисків стікаючого стисненого повітря, також пропорційна величині зсуву деталей, що підлягають складанню. Ця різниця тисків контролюється підключеними до сопел 6 і 16 датчиками реле тиску відповідно 20 і 22, і аналогічно підключеними до двох інших сопел 18 і 19 датчиками реле тиску 23 і 21. Оскільки менший переріз кільцевого зазору (наприклад, Б
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B25J 15/00, B23P 19/04
Мітки: модуль, складальний, маніпулятора
Код посилання
<a href="https://ua.patents.su/7-120783-skladalnijj-modul-manipulyatora.html" target="_blank" rel="follow" title="База патентів України">Складальний модуль маніпулятора</a>
Модуль маніпулятора
Номер патенту: 75032
Опубліковано: 15.03.2006
Автори: Копп Вадим Якович, Бондарєва Наталя Анатоліївна, Балакін Олексій Ігоревич, Круговой Олександр Миколайович
МПК: B25J 9/00
Мітки: маніпулятора, модуль
Формула / Реферат:
Модуль маніпулятора, який містить пневмопривід, зв'язаний з пружним елементом, та гальмівні головки, кінематично зв’язані з електропневмоперетворювачами, який відрізняється тим, що пневмопривід виконаний у вигляді моментного циліндра, шток якого має можливість повороту і жорстко з’єднаний з пружним елементом, який має форму східчастого вала, причому гальмівні головки виконані у вигляді різноплечих клемних затискачів з можливістю фіксації...
Модуль маніпулятора
Номер патенту: 75033
Опубліковано: 15.03.2006
Автори: Круговой Олександр Миколайович, Балакін Олексій Ігоревич, Копп Вадим Якович, Бондарєва Наталя Анатоліївна
МПК: B25J 9/00
Мітки: модуль, маніпулятора
Формула / Реферат:
Модуль маніпулятора, який містить перший та другий стержні, що розташовані у нерухомій напрямній, пневмоциліндр, шток якого встановлений з можливістю зворотно – поступального руху та жорстко зв’язаний з першим стержнем через рухому напрямну, пружний елемент, жорстко зв’язаний з першим та другим стержнями, та також обладнаний електропневмоперетворювачами, зв’язаними з гальмівними головками і датчиком зворотного зв'язку, який відрізняється...
Автоматизований складальний комплекс

Номер патенту: 61472
Опубліковано: 17.11.2003
Автори: Горященко Сергій Леонідович, Панчук Володимир Васильович, Драпак Георгій Мефодійович
МПК: A43D 111/00
Мітки: комплекс, автоматизований, складальний
Формула / Реферат:
Автоматизований складальний комплекс, що містить закріплений на станині механізм для подачі деталей на позицію складання, який встановлений на штоці силового циліндра і оснащений кареткою, що несе засоби для поштучного відокремлення і маніпулювання деталями, пристрій для завантаження деталей з блоком касет, встановлених за допомогою напрямних, та пов'язаний з ним механізм для підтримання постійного рівня верхньої деталі, а також пристосування...
Захоплюючий пристрій маніпулятора
Номер патенту: 68761
Опубліковано: 10.04.2012
Автори: Резенчук Олена Євгенівна, Фоменкова Анастасія Олексіївна, Кузнєцов Юрій Миколайович
МПК: B25J 15/00
Мітки: пристрій, захоплюючий, маніпулятора
Формула / Реферат:
Захоплюючий пристрій маніпулятора, що містить циліндричний пустотілий корпус, упорну гайку, трубку, порожнина якої має можливість зв'язуватись з джерелом живлення робочого середовища, який відрізняється тим, що трубка виконана у вигляді гвинтової спіралі з неметалевого матеріалу поверх циліндричного пустотілого корпуса, завальцьований кінець трубки розміщений всередині упорної гайки, що виконана з неметалевого матеріалу, а відкритий прямий...
Підкладочний килимок до комп’ютерного маніпулятора типу “миша”
Номер патенту: 1141
Опубліковано: 15.01.2002
Автор: Кравцов Сергій Георгійович
МПК: G06T 11/80, G06F 3/033
Мітки: комп'ютерного, миша, килимок, типу, підкладочний, маніпулятора
Формула / Реферат:
Підкладочний килимок до комп'ютерного маніпулятора типу "миша", що має площинну форму, який відрізняється тим, що матеріалом для його виготовлення є пробкова прескомпозиція на основі кори пробкового дуба.
Попередній патент: Бігунковий візок для рейкових транспортних засобів
Наступний патент: Апарат для культивування клітин з рухомою зоною турбулентності
Випадковий патент: Спосіб роботи низькотемпературного банку біологічних об'єктів