Модуль маніпулятора
Номер патенту: 75032
Опубліковано: 15.03.2006
Автори: Копп Вадим Якович, Бондарєва Наталя Анатоліївна, Круговой Олександр Миколайович, Балакін Олексій Ігоревич
Формула / Реферат
Модуль маніпулятора, який містить пневмопривід, зв'язаний з пружним елементом, та гальмівні головки, кінематично зв’язані з електропневмоперетворювачами, який відрізняється тим, що пневмопривід виконаний у вигляді моментного циліндра, шток якого має можливість повороту і жорстко з’єднаний з пружним елементом, який має форму східчастого вала, причому гальмівні головки виконані у вигляді різноплечих клемних затискачів з можливістю фіксації згаданого пружного елемента.
Текст
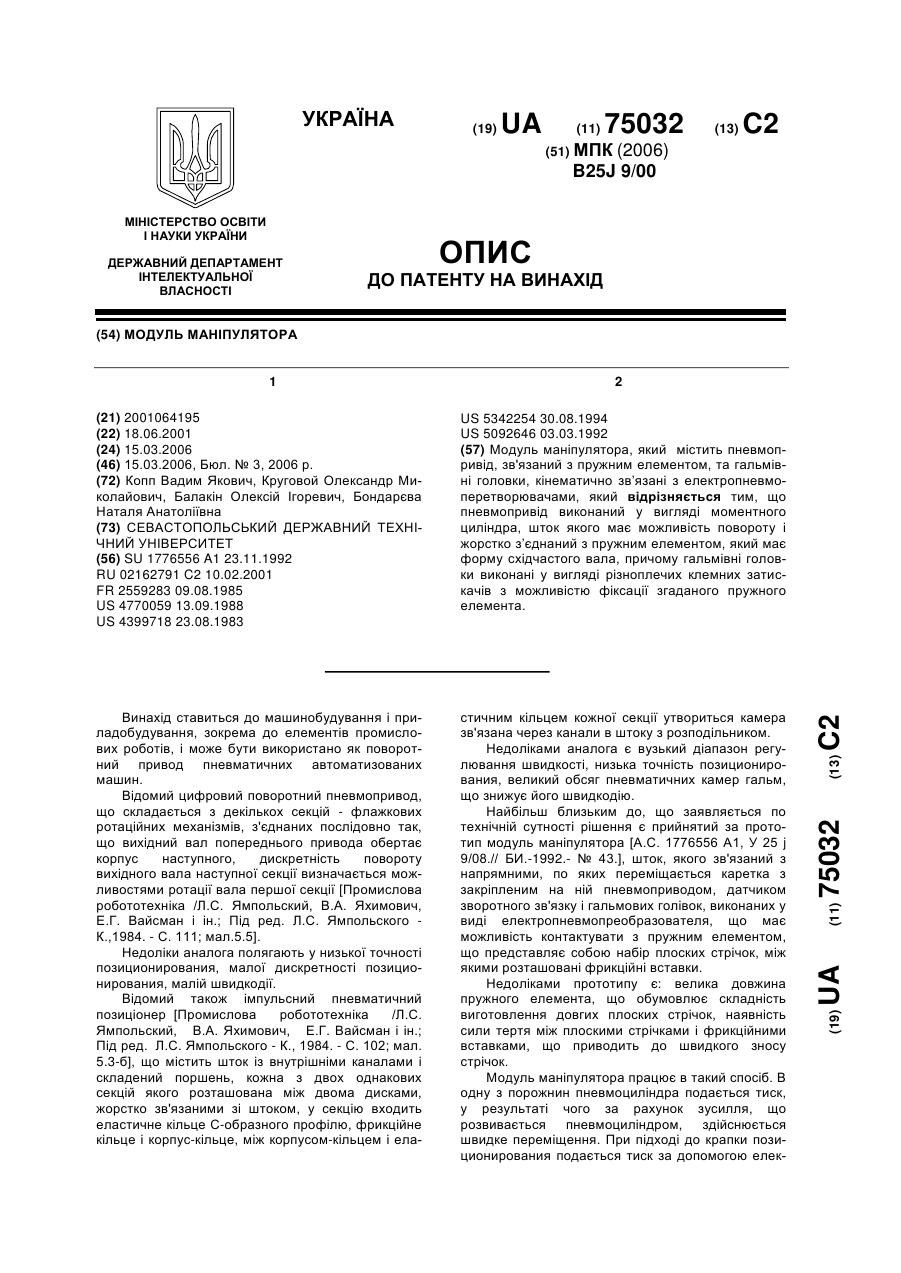
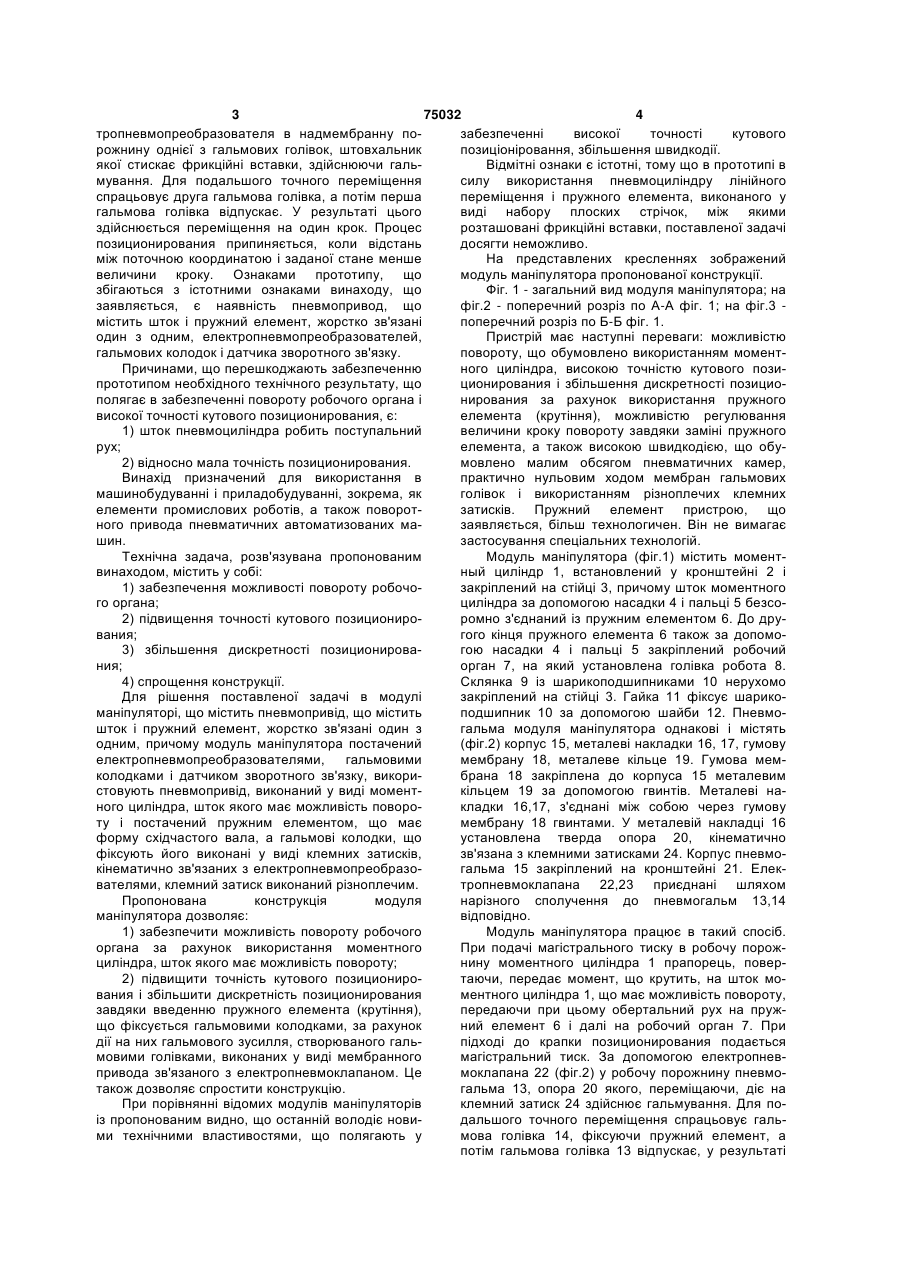
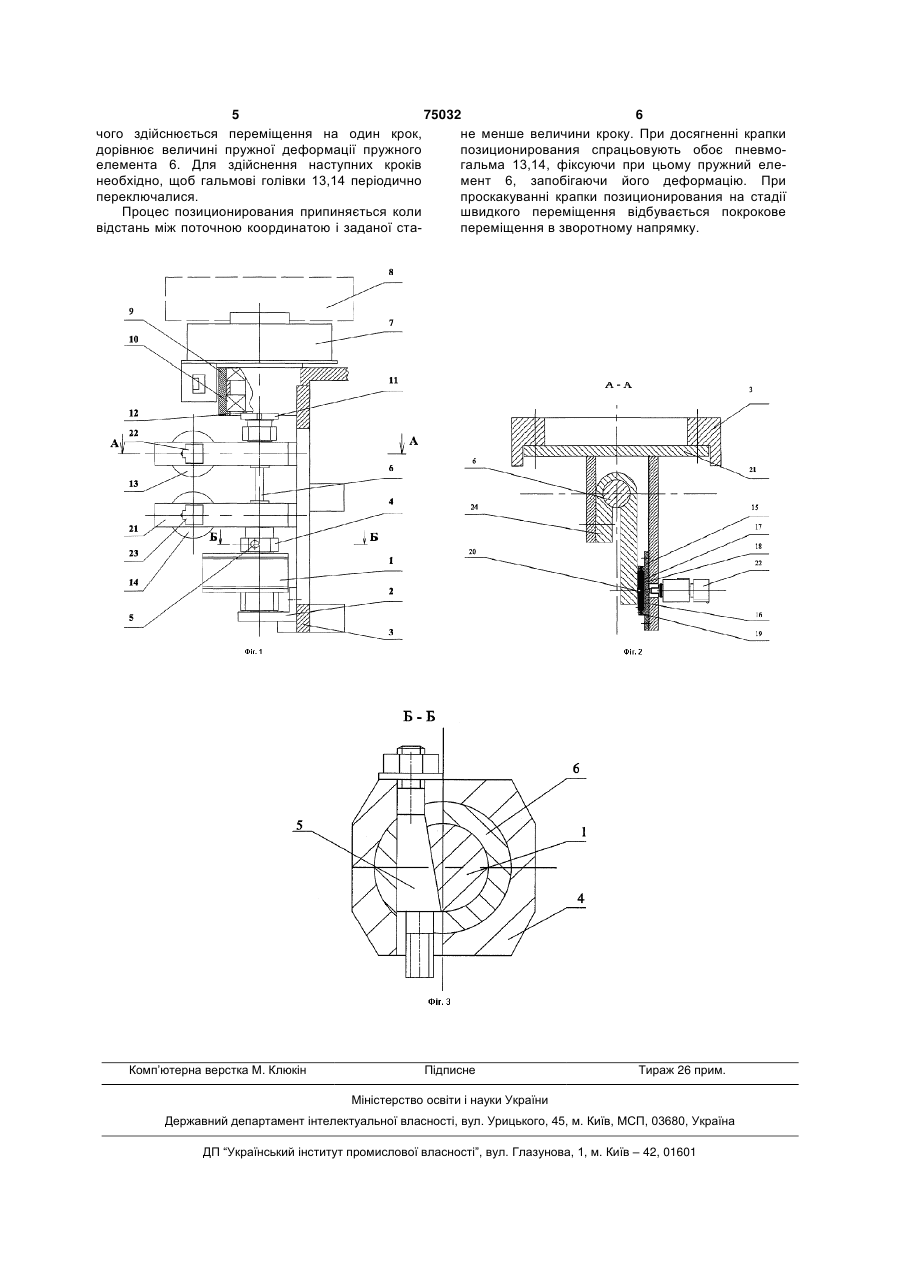
Модуль маніпулятора, який містить пневмопривід, зв'язаний з пружним елементом, та гальмівні головки, кінематично зв’язані з електропневмоперетворювачами, який відрізняється тим, що пневмопривід виконаний у вигляді моментного циліндра, шток якого має можливість повороту і жорстко з’єднаний з пружним елементом, який має форму східчастого вала, причому гальмівні головки виконані у вигляді різноплечих клемних затискачів з можливістю фіксації згаданого пружного елемента. (19) (21) 2001064195 (22) 18.06.2001 (24) 15.03.2006 (46) 15.03.2006, Бюл. № 3, 2006 р. (72) Копп Вадим Якович, Круговой Олександр Миколайович, Балакін Олексій Ігоревич, Бондарєва Наталя Анатоліївна (73) СЕВАСТОПОЛЬСЬКИЙ ДЕРЖАВНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ (56) SU 1776556 A1 23.11.1992 RU 02162791 C2 10.02.2001 FR 2559283 09.08.1985 US 4770059 13.09.1988 US 4399718 23.08.1983 3 75032 4 тропневмопреобразователя в надмембранну позабезпеченні високої точності кутового рожнину однієї з гальмових голівок, штовхальник позиціоніровання, збільшення швидкодії. якої стискає фрикційні вставки, здійснюючи гальВідмітні ознаки є істотні, тому що в прототипі в мування. Для подальшого точного переміщення силу використання пневмоциліндру лінійного спрацьовує друга гальмова голівка, а потім перша переміщення і пружного елемента, виконаного у гальмова голівка відпускає. У результаті цього виді набору плоских стрічок, між якими здійснюється переміщення на один крок. Процес розташовані фрикційні вставки, поставленої задачі позиционирования припиняється, коли відстань досягти неможливо. між поточною координатою і заданої стане менше На представлених кресленнях зображений величини кроку. Ознаками прототипу, що модуль маніпулятора пропонованої конструкції. збігаються з істотними ознаками винаходу, що Фіг. 1 - загальний вид модуля маніпулятора; на заявляється, є наявність пневмопривод, що фіг.2 - поперечний розріз по А-А фіг. 1; на фіг.3 містить шток і пружний елемент, жорстко зв'язані поперечний розріз по Б-Б фіг. 1. один з одним, електропневмопреобразователей, Пристрій має наступні переваги: можливістю гальмових колодок і датчика зворотного зв'язку. повороту, що обумовлено використанням моментПричинами, що перешкоджають забезпеченню ного циліндра, високою точністю кутового позипрототипом необхідного технічного результату, що ционирования і збільшення дискретності позициополягає в забезпеченні повороту робочого органа і нирования за рахунок використання пружного високої точності кутового позиционирования, є: елемента (крутіння), можливістю регулювання 1) шток пневмоциліндра робить поступальний величини кроку повороту завдяки заміні пружного рух; елемента, а також високою швидкодією, що обу2) відносно мала точність позиционирования. мовлено малим обсягом пневматичних камер, Винахід призначений для використання в практично нульовим ходом мембран гальмових машинобудуванні і приладобудуванні, зокрема, як голівок і використанням різноплечих клемних елементи промислових роботів, а також поворотзатисків. Пружний елемент пристрою, що ного привода пневматичних автоматизованих мазаявляється, більш технологичен. Він не вимагає шин. застосування спеціальних технологій. Технічна задача, розв'язувана пропонованим Модуль маніпулятора (фіг.1) містить моментвинаходом, містить у собі: ный циліндр 1, встановлений у кронштейні 2 і 1) забезпечення можливості повороту робочозакріплений на стійці 3, причому шток моментного го органа; циліндра за допомогою насадки 4 і пальці 5 безсо2) підвищення точності кутового позиционироромно з'єднаний із пружним елементом 6. До друвания; гого кінця пружного елемента 6 також за допомо3) збільшення дискретності позиционировагою насадки 4 і пальці 5 закріплений робочий ния; орган 7, на який установлена голівка робота 8. 4) спрощення конструкції. Склянка 9 із шарикоподшипниками 10 нерухомо Для рішення поставленої задачі в модулі закріплений на стійці 3. Гайка 11 фіксує шарикоманіпуляторі, що містить пневмопривід, що містить подшипник 10 за допомогою шайби 12. Пневмошток і пружний елемент, жорстко зв'язані один з гальма модуля маніпулятора однакові і містять одним, причому модуль маніпулятора постачений (фіг.2) корпус 15, металеві накладки 16, 17, гумову електропневмопреобразователями, гальмовими мембрану 18, металеве кільце 19. Гумова мемколодками і датчиком зворотного зв'язку, викорибрана 18 закріплена до корпуса 15 металевим стовують пневмопривід, виконаний у виді моменткільцем 19 за допомогою гвинтів. Металеві наного циліндра, шток якого має можливість поворокладки 16,17, з'єднані між собою через гумову ту і постачений пружним елементом, що має мембрану 18 гвинтами. У металевій накладці 16 форму східчастого вала, а гальмові колодки, що установлена тверда опора 20, кінематично фіксують його виконані у виді клемних затисків, зв'язана з клемними затисками 24. Корпус пневмокінематично зв'язаних з електропневмопреобразогальма 15 закріплений на кронштейні 21. Елеквателями, клемний затиск виконаний різноплечим. тропневмоклапана 22,23 приєднані шляхом Пропонована конструкція модуля нарізного сполучення до пневмогальм 13,14 маніпулятора дозволяє: відповідно. 1) забезпечити можливість повороту робочого Модуль маніпулятора працює в такий спосіб. органа за рахунок використання моментного При подачі магістрального тиску в робочу порожциліндра, шток якого має можливість повороту; нину моментного циліндра 1 прапорець, повер2) підвищити точність кутового позициониротаючи, передає момент, що крутить, на шток мования і збільшити дискретність позиционирования ментного циліндра 1, що має можливість повороту, завдяки введенню пружного елемента (крутіння), передаючи при цьому обертальний рух на пружщо фіксується гальмовими колодками, за рахунок ний елемент 6 і далі на робочий орган 7. При дії на них гальмового зусилля, створюваного гальпідході до крапки позиционирования подається мовими голівками, виконаних у виді мембранного магістральний тиск. За допомогою електропневпривода зв'язаного з електропневмоклапаном. Це моклапана 22 (фіг.2) у робочу порожнину пневмотакож дозволяє спростити конструкцію. гальма 13, опора 20 якого, переміщаючи, діє на При порівнянні відомих модулів маніпуляторів клемний затиск 24 здійснює гальмування. Для поіз пропонованим видно, що останній володіє новидальшого точного переміщення спрацьовує гальми технічними властивостями, що полягають у мова голівка 14, фіксуючи пружний елемент, а потім гальмова голівка 13 відпускає, у результаті 5 75032 6 чого здійснюється переміщення на один крок, не менше величини кроку. При досягненні крапки дорівнює величині пружної деформації пружного позиционирования спрацьовують обоє пневмоелемента 6. Для здійснення наступних кроків гальма 13,14, фіксуючи при цьому пружний еленеобхідно, щоб гальмові голівки 13,14 періодично мент 6, запобігаючи його деформацію. При переключалися. проскакуванні крапки позиционирования на стадії Процес позиционирования припиняється коли швидкого переміщення відбувається покрокове відстань між поточною координатою і заданої стапереміщення в зворотному напрямку. Комп’ютерна верстка М. Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюModule of manipulator
Автори англійськоюKopp Vadym Yakovych
Назва патенту російськоюМодуль манипулятора
Автори російськоюКопп Вадим Яковлевич
МПК / Мітки
МПК: B25J 9/00
Мітки: маніпулятора, модуль
Код посилання
<a href="https://ua.patents.su/3-75032-modul-manipulyatora.html" target="_blank" rel="follow" title="База патентів України">Модуль маніпулятора</a>
Силовий напівпровідниковий модуль
Номер патенту: 62975
Опубліковано: 15.01.2004
Автори: Фрей Тоні, Бухер Бенно, Ланг Томас
МПК: H01L 25/07
Мітки: напівпровідниковий, силовий, модуль
Формула / Реферат:
1. Силовий напівпровідниковий модуль, що містить нижню плату, верхню плату і щонайменше один напівпровідниковий кристал, який першим головним електродом сполучений з нижньою платою, а другим головним електродом через підпружинений електричний контактний елемент - з верхньою платою, який відрізняється тим, що передбачено щонайменше один пружинний елемент, який виконано з можливістю розсовувати щонайменше один контактний елемент у положення, що...
Підкладочний килимок до комп’ютерного маніпулятора типу “миша”
Номер патенту: 1141
Опубліковано: 15.01.2002
Автор: Кравцов Сергій Георгійович
МПК: G06F 3/033, G06T 11/80
Мітки: комп'ютерного, маніпулятора, килимок, типу, підкладочний, миша
Формула / Реферат:
Підкладочний килимок до комп'ютерного маніпулятора типу "миша", що має площинну форму, який відрізняється тим, що матеріалом для його виготовлення є пробкова прескомпозиція на основі кори пробкового дуба.
Схват маніпулятора
Номер патенту: 35903
Опубліковано: 16.04.2001
Автори: Романець Тарас Петрович, Драпак Георгій Мефодійович
МПК: B25J 15/06
Мітки: маніпулятора, схват
Формула / Реферат:
Схват маніпулятора, який містить корпус, присмоктувані, упор та коромисло з'єднане з упором відрізняється тим, що присмоктувані приєднані до повзунів, які нерухомо закріплені на пружному коромислі з можливістю зміни їх положення і розташовані на штангах що жорстко приєднані до корпусу, а жорсткий упор встановлено на пружному коромислі з можливістю зміни його висоти і положення, і оснащено плоскою площиною розташованою паралельно повзунам з...
Схват маніпулятора

Номер патенту: 51347
Опубліковано: 15.11.2002
Автори: Гусев Олексій Володимирович, Березнюк Володимир Володимирович, Рудик Юрій Микитович, Карпачов Юрій Андрійович
МПК: B25J 15/00
Мітки: маніпулятора, схват
Формула / Реферат:
Схват маніпулятора, що містить корпус, привід переміщення схвата, зв'язані з ним через гвинтову пару і передатний механізм затискні губки, який відрізняється тим, що на валу приводу переміщення схвата закріплена шестірня його передатного механізму, що знаходиться в зачепленні з зубчастим колесом, усередині якого співвісно з ним встановлені гайка гвинтової пари і гвинт, зв'язаний з корпусом з можливістю зворотно-поступального руху гвинта,...
Схват маніпулятора

Номер патенту: 7281
Опубліковано: 15.06.2005
Автори: Захаренко Анатолій Олександрович, Сміт Крейг Ф., Роуланд Марк Стефан, Карпачов Юрій Андрійович, Савенко Юрій Миколайович
МПК: B25J 15/00
Мітки: маніпулятора, схват
Формула / Реферат:
1. Схват маніпулятора, що містить корпус, привід переміщення охвата, привід обертання схвата і затискні губки, кінематично зв'язані з приводами, який відрізняється тим, що додатково він споряджений додатковими затискними губками, виконаними пружними, як і основні затискні губки, і в нижній частині жорстко зчленованими з ними, причому привід переміщення схвата сполучений з черв'яком, який знаходиться в зачепленні з двома черв'ячними секторами,...
Попередній патент: Спосіб прогнозування землетрусів
Наступний патент: Модуль маніпулятора
Випадковий патент: Спосіб прогнозування інсульту після транзиторної ішемічної атаки кардіоемболічного генезу