Модуль маніпулятора
Номер патенту: 75033
Опубліковано: 15.03.2006
Автори: Круговой Олександр Миколайович, Бондарєва Наталя Анатоліївна, Копп Вадим Якович, Балакін Олексій Ігоревич
Формула / Реферат
Модуль маніпулятора, який містить перший та другий стержні, що розташовані у нерухомій напрямній, пневмоциліндр, шток якого встановлений з можливістю зворотно – поступального руху та жорстко зв’язаний з першим стержнем через рухому напрямну, пружний елемент, жорстко зв’язаний з першим та другим стержнями, та також обладнаний електропневмоперетворювачами, зв’язаними з гальмівними головками і датчиком зворотного зв'язку, який відрізняється тим, що пружний елемент виконаний у вигляді пальця з двома пазами на його циліндричній поверхні, а гальмівні головки виконані у вигляді клемних затискачів, які встановлені з можливістю контактування з нерухомою напрямною з почерговим фіксуванням першого та другого стержнів.
Текст
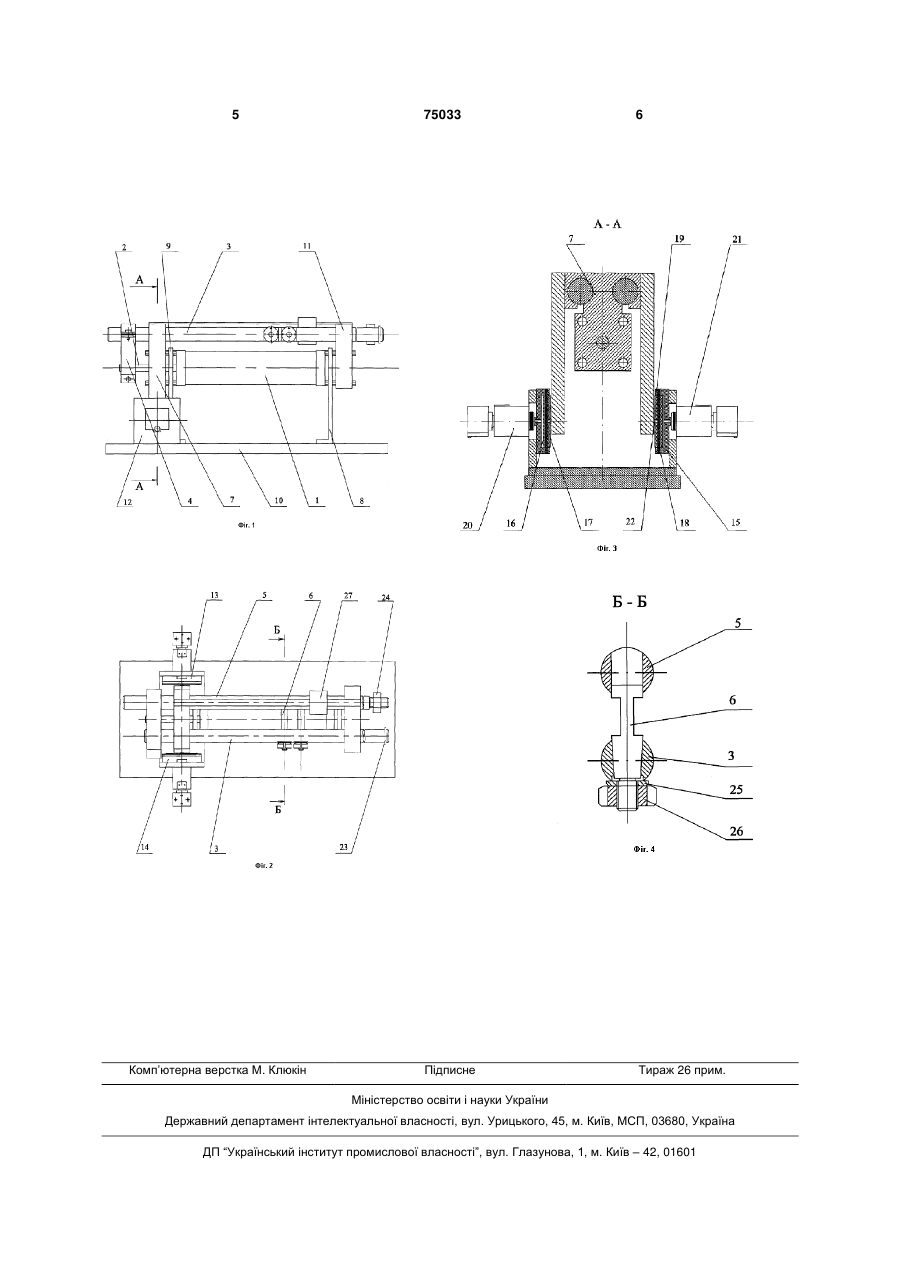
Модуль маніпулятора, який містить перший та другий стержні, що розташовані у нерухомій напрямній, пневмоциліндр, шток якого встановлений з можливістю зворотно – поступального руху та жорстко зв’язаний з першим стержнем через рухому напрямну, пружний елемент, жорстко зв’язаний з першим та другим стержнями, та також обладнаний електропневмоперетворювачами, зв’язаними з гальмівними головками і датчиком зворотного зв'язку, який відрізняється тим, що пружний елемент виконаний у вигляді пальця з двома пазами на його циліндричній поверхні, а гальмівні головки виконані у вигляді клемних затискачів, які встановлені з можливістю контактування з нерухомою напрямною з почерговим фіксуванням першого та другого стержнів. Винахід ставиться до машинобудування і приладобудування, зокрема, до елементів промислових роботів і може бути використаний як привід пневматичних автоматизованих машин. Відомий пневмопривід із пневмомеханічним фрикційним пристроєм, взаємодіючим з додатковою штангою, зв'язаною зі штоком пневмоциліндра [Филипов І.Б. Гальмові пристрої пневмоприводів. Л., 1987.- С.20; мал. 1.106]. Недоліками аналога є низька точність позиціювання, вузький діапазон регулювання швидкості, привід відрізняється великими обсягами пневматичних камер фрикційних гальм, що знижує їх швидкодію, не має можливості крокового переміщення. Відомий також імпульсний пневматичний позиціонер [Промислова робототехніка/ Л.С. Ямпольський, В.А. Яхимович, Є.Г. Вайсман і ін.; Під ред. Л.С. Ямпольського -К.,1984. - C.I 02; мал.5.36], що містить шток із внутрішніми каналами і складений поршень, кожна з двох однакових секцій якого розташована між двома дисками, жорстко зв'язаними зі штоком, у секцію входить еластичне кільце С-видного профілю, фрикційне кільце і корпус-кільце, між корпусом-кільцем і ела стичним кільцем кожної секції утворюється камера, зв'язана через канали в штоку з розподільником. Недоліками аналога є низька точність позиціювання, вузький діапазон регулювання швидкості. Найбільш близьким по технічній суті рішенням є прийнятий за прототип модуль маніпулятора [А.С. 1776556 А1, У 25 j 9/08:// БИ. - 1992. - № 43.], шток якого жорстко зв'язаний з напрямними по яким переміщується каретка з закріпленим на ній пневмоприводом, датчиком зворотного зв'язку і гальмових головок, виконаних у вигляді електропневмоперетворювача, що має можливість контактувати з пружними елементом, що представляє собою набір плоских стрічок, між якими розташовані фрикційні вставки. Недоліками прототипу є: велика довжина плоских стрічок пружного елемента, що обумовлює складність його виготовлення, труднощі регулювання величини кроку переміщення, тому що для цього необхідно переміщувати гальмові головки і перевіряти ступінь натягу пружного елемента, наявність сили тертя між плоскими стрічками і фрикційними вставками, що прискорює знос пружного елемента. (19) UA (11) 75033 (13) C2 (21) 2001064196 (22) 18.06.2001 (24) 15.03.2006 (46) 15.03.2006, Бюл. № 3, 2006 р. (72) Копп Вадим Якович, Круговой Олександр Миколайович, Балакін Олексій Ігоревич, Бондарєва Наталя Анатоліївна (73) СЕВАСТОПОЛЬСЬКИЙ ДЕРЖАВНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ (56) SU 1776556 A1 23.11.1992 SU 1798177 A1 28.02.1993 SU 1466934 A1 23.03.1989 SU 1785889 07.01.1993 JP 11104921 20.04.1999 JP 9155772 17.06.1997 DE 19607079 28.08.1997 US 5092646 03.03.1992 3 75033 4 Модуль маніпулятора працює в такий спосіб. В новими технічними властивостями, що полягають одну з порожнин пневмоциліндра подається тиск, у простоті регулювання величини кроку у результаті за рахунок зусилля, що розвивається переміщення за рахунок установки пружного елепневмоциліндром, здійснюється швидке мента в різні положення. переміщення. При підході до точки позиціювання Характерні ознаки є істотними, тому що в подається тиск за допомогою електропневмоклапрототипі в силу використання пружного елеменпану в надмембранну порожнину однієї з гальмота, виконаного у вигляді набору плоских стрічок, вих головок, штовхальник якої стискає фрикційні між якими розташовані фрикційні вставки, вставки, здійснюючи гальмування. Для подальшопоставленої задачі досягти неможливо. го точного переміщення спрацьовує друга гальмоФіг.1 - загальний вид модуля маніпулятора, ва головка, а потім перша головка відпускає. У фіг.2 - вид зверху фіг.1, фіг.3 - перетин по А-А результаті цього здійснюється переміщення на фіг.1, фіг.4 - перетин по Б-Б фіг.2. один крок. Процес позиціювання припиняється, Модуль маніпулятора (фіг.1) містить коли відстань між поточною координатою і задапневмоциліндр 1 зі штоком 2, жорстко зв'язаним зі ною стане менше величини кроку. стержнем 3 через рухливу напрямну 4. Стержень 5 Ознаками збіжності прототипу з ознаками визв'язаний зі стержнем 3 за допомогою пружного находу, що заявляється, є пневмопривід, шток елемента 6. Нерухома напрямна 7 сполучена з якого жорстко зв'язаний з напрямій, і пружний клемними затискачами. Пневмоциліндр 1 встановелемент, електропневмоперетворювачі, гальмові лений у кронштейнах 8, 9, зв'язаних з підставою головки і датчик зворотного зв'язку. 10. На стяжках пневмоциліндра 1 закріплена неруПричинами, що перешкоджають забезпеченню хома напрямна 11. На кронштейнах 12 прототипом необхідного технічного результату, що установлені пневмогальма 13,14 (фіг. 3),що полягає в легкості регулювання величини кроку містять корпус 15, металеві накладки 16, 17, гумопереміщення, є: ву мембрану 18, кільце 19. Гумова мембрана 19 1) необхідність переміщення гальмових голожорстко зв'язана з корпусом 15 за допомогою вок; гвинтів і металевого кільця 19. Електропневмокла2) необхідність перевірки ступеня натягу пружпани 20, 21 шляхом нарізного сполучення ного елемента. приєднані до пневмогальм 13, 14 відповідно. ОпоВинахід призначений для використання в ра 22 кінематичне зв'язана з клемними затисками машинобудуванні і приладобудуванні, зокрема, у нерухомою напрямой 7. Стержні 3, 5 містять стопромислових роботах як привід. порне кільце 23 і гайку 24 відповідно. Пружний Технічна задача, розв'язувана пропонованим елемент 6 жорстко зв'язаний зі стержнем 3 за довинаходом, містить у собі: помогою шайби 25 і гайки 26 і датчиком зворотного 1) спрощення конструкції; зв'язку 27. 2) розширення функціональних можливостей Модуль маніпулятора працює в такий спосіб. за рахунок використання пружного елемента (виПри подачі магістрального тиску в робочу порожгину), що спрощує процес регулювання кроку нину пневмоциліндра 1 шток 2 і стержень 3, переміщення. зв'язані один з одним за допомогою рухливою наДля рішення поставленої задачі в модулі прямой 4, роблять швидке переміщення. Стерманіпулятора, що містить пневмопривід, шток якожень 5 приводиться в рух пружними елементами го жорстко зв'язаний з напрямой, і пружний еле6. При підході до точки позиціювання тиск мент, а також обладнаний електропневмопереподається в надмебранну порожнину пневмогальтворювачами, гальмовими головками і датчиком ма 13, у результаті чого опора 22 діє на клемний зворотного зв'язку, пружний елемент виконаний у затиск, фіксуючи стержень 5. Для подальшого вигляді пальця з двома пазами на циліндричній точного переміщення спрацьовує пневмогальмо поверхні, а гальмові колодки являють собою 14, фіксуючи стержень 3, а пневмогальмо 13 клемні затискачі, сполучені з нерухомою напрявідпускає стержень 5, у результаті чого робочий мой. орган робить переміщення на один крок. Для поЗапропонована конструкція модуля дальшого переміщення цикл повторюється. Проманіпулятора дозволяє розширити функціональні цес позиціювання припиняється, коли різниця між можливості за рахунок використання пружного поточною координатою і заданою стане менше елементу (вигину), тому що це спрощує процес величини кроку. При досягненні точки регулювання кроку переміщення, а також зменшує позиціювання спрацьовують обидва пневмогальма час регулювання. Використання пружного елемен13, 14, фіксуючи при цьому пружний елемент б, та, виконаного у вигляді пальця з двома пазами на запобігаючи його деформації. При «проскакуванні» циліндричній поверхні, дозволяє спростити точки позиціювання на стадії швидкого конструкцію. Спрощення також досягається за переміщення відбувається покрокове переміщення рахунок відсутності каретки, що існує в прототипі. в зворотному напрямку. При порівнянні відомих модулів маніпуляторів із запропонованим видно, що останній володіє 5 Комп’ютерна верстка М. Клюкін 75033 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюModule of manipulator
Автори англійськоюKopp Vadym Yakovych
Назва патенту російськоюМодуль манипулятора
Автори російськоюКопп Вадим Яковлевич
МПК / Мітки
МПК: B25J 9/00
Мітки: модуль, маніпулятора
Код посилання
<a href="https://ua.patents.su/3-75033-modul-manipulyatora.html" target="_blank" rel="follow" title="База патентів України">Модуль маніпулятора</a>
Модуль маніпулятора
Номер патенту: 75032
Опубліковано: 15.03.2006
Автори: Круговой Олександр Миколайович, Балакін Олексій Ігоревич, Копп Вадим Якович, Бондарєва Наталя Анатоліївна
МПК: B25J 9/00
Мітки: маніпулятора, модуль
Формула / Реферат:
Модуль маніпулятора, який містить пневмопривід, зв'язаний з пружним елементом, та гальмівні головки, кінематично зв’язані з електропневмоперетворювачами, який відрізняється тим, що пневмопривід виконаний у вигляді моментного циліндра, шток якого має можливість повороту і жорстко з’єднаний з пружним елементом, який має форму східчастого вала, причому гальмівні головки виконані у вигляді різноплечих клемних затискачів з можливістю фіксації...
Пружно-демпферний модуль підвіски
Номер патенту: 75223
Опубліковано: 15.03.2006
Автори: Мельничук Сергій Володимирович, Рибалкін Єфрем Михайлович
МПК: B60G 25/00
Мітки: пружно-демпферний, підвіски, модуль
Формула / Реферат:
Пружно-демпферний модуль підвіски, що містить пружний (6) та демпферний (7) елементи, які паралельно розміщені та жорстко об'єднані в один модуль, який відрізняється тим, що додатково введений чотириланковий важільний механізм (1), між верхнім (2) і нижнім (3) шарнірами якого закріплені пружний (6) і демпферний (7) елементи, а з бічними його шарнірами (4 та 5) жорстко зв'язані повздовжні горизонтальні напрямні (8), що виконані з можливістю...
Силовий напівпровідниковий модуль
Номер патенту: 62975
Опубліковано: 15.01.2004
Автори: Фрей Тоні, Ланг Томас, Бухер Бенно
МПК: H01L 25/07
Мітки: напівпровідниковий, силовий, модуль
Формула / Реферат:
1. Силовий напівпровідниковий модуль, що містить нижню плату, верхню плату і щонайменше один напівпровідниковий кристал, який першим головним електродом сполучений з нижньою платою, а другим головним електродом через підпружинений електричний контактний елемент - з верхньою платою, який відрізняється тим, що передбачено щонайменше один пружинний елемент, який виконано з можливістю розсовувати щонайменше один контактний елемент у положення, що...
Підкладочний килимок до комп’ютерного маніпулятора типу “миша”
Номер патенту: 1141
Опубліковано: 15.01.2002
Автор: Кравцов Сергій Георгійович
МПК: G06T 11/80, G06F 3/033
Мітки: килимок, типу, підкладочний, маніпулятора, комп'ютерного, миша
Формула / Реферат:
Підкладочний килимок до комп'ютерного маніпулятора типу "миша", що має площинну форму, який відрізняється тим, що матеріалом для його виготовлення є пробкова прескомпозиція на основі кори пробкового дуба.
Схват маніпулятора
Номер патенту: 35903
Опубліковано: 16.04.2001
Автори: Романець Тарас Петрович, Драпак Георгій Мефодійович
МПК: B25J 15/06
Мітки: маніпулятора, схват
Формула / Реферат:
Схват маніпулятора, який містить корпус, присмоктувані, упор та коромисло з'єднане з упором відрізняється тим, що присмоктувані приєднані до повзунів, які нерухомо закріплені на пружному коромислі з можливістю зміни їх положення і розташовані на штангах що жорстко приєднані до корпусу, а жорсткий упор встановлено на пружному коромислі з можливістю зміни його висоти і положення, і оснащено плоскою площиною розташованою паралельно повзунам з...
Попередній патент: Модуль маніпулятора
Наступний патент: Трициклічні інгібітори полімерази полі(адф-рибози) для лікування раку та інгібування нейротоксичності, їх застосування та фармацевтична композиція на їх основі
Випадковий патент: Пристрій для зручного користування пахвовими милицями