Маніпулятор
Номер патенту: 55016
Опубліковано: 10.12.2010
Автори: Драгомирецький Юлій Олександрович, Кравченко Віталій Андрійович, Шаповалова Галина Микитівна, Воротніков Віталій Анатолійович, Кулігін Анатолій Михайлович, Авдеев Анатолій Олексійович, Кушнір Максим Миколайович

Формула / Реферат
1. Маніпулятор, що містить раму, пов'язану з нею руку із затискачем і механізм компенсації ваги, який відрізняється тим, що рама виконана підвісною у вигляді горизонтальної і вертикальної балок, жорстко закріплених між собою краями під прямим кутом, рука закріплена до нижнього краю вертикальної балки співнаправлено з горизонтальною балкою, при цьому рама забезпечена механізмами її вертикального переміщення і кутового розвороту затискача у вертикальній площині симетрії маніпулятора, а затискач оснащене механізмом повороту, вісь обертання якого перпендикулярна осі обертання затискача у вертикальній площині симетрії маніпулятора.
2. Маніпулятор за п. 1, який відрізняється тим, що він змонтований на гнучкій підвісці, наприклад, за допомогою серги, на рухомому підйомно-транспортному агрегаті або кран-балці.
3. Маніпулятор за п. 1, який відрізняється тим, що рука закріплена до вертикальної балки жорстко під кутом від 90 до 135°.
4. Маніпулятор за п. 1, який відрізняється тим, що рука закріплена до вертикальної балки на фіксуючому шарнірі, який забезпечує стабілізацію руки під кутом від 45 до 135° до вертикальної балки.
5. Маніпулятор за п. 1, який відрізняється тим, що виконавчий вузол механізму вертикального переміщення рами виконаний у вигляді черв'ячної передачі.
6. Маніпулятор за п. 1, який відрізняється тим, що механізм розвороту затискача у вертикальній площині виконаний у вигляді черв'ячної передачі.
7. Маніпулятор за пп. 1, 6, який відрізняється тим, що черв'ячне колесо механізму вертикального переміщення оснащене приводним маховиком і ходовим гвинтом, що взаємодіє з циліндричною напрямною, в пазах якої вмонтовані ролики.
8. Маніпулятор за пп. 1, 6, який відрізняється тим, що черв'ячне колесо механізму розвороту затискача у вертикальній площині симетрії маніпулятора жорстко пов'язане з валом, встановленим усередині корпусу руки, а на кінці вала виконано конічне зубчате колесо, що взаємодіє з конічним сектором, вісь обертання якого перпендикулярна подовжній осі валу.
9. Маніпулятор за п. 1, який відрізняється тим, що виконавчий вузол механізму розвороту затискача в площині, вісь обертання якої перпендикулярна осі розвороту затискача у вертикальній площині симетрії маніпулятора, виконаний у вигляді гвинтової ноніусної передачі.
10. Маніпулятор за пп. 1, 9, який відрізняється тим, що затискач складається з планшайби з хвостовиком і стикувальними отворами, а торець планшайби жорстко сполучений з рухомою гайкою гвинтової ноніусної передачі.
11. Маніпулятор за п. 1, який відрізняється тим, що виконавчий вузол механізму компенсації ваги виконаний у вигляді ланцюгової передачі.
12. Маніпулятор за пп. 1, 2, 11, який відрізняється тим, що горизонтальна балка коробчатого перерізу оснащена бічними подовжніми пазами і тарованою шкалою, усередині неї розташовані каретка з сергою і ходовий гвинт, що взаємодіє з відповідною гайкою рухомої каретки і сполучений з приводним валом переміщення серги, на зовнішньому кінці якого встановлена зірочка ланцюгової передачі.
13. Маніпулятор за пп. 1, 11, який відрізняється тим, що в нижній частині вертикальної балки встановлений приводний вузол механізму компенсації ваги, що включає ходовий гвинт, захисний кожух, маховик і відповідну зірочку, пов'язану із зірочкою приводного вала ланцюгом, який охоплений захисним кожухом.
14. Маніпулятор за п. 1, який відрізняється тим, що щонайменше один з механізмів переміщення оснащений електроприводом.
Текст
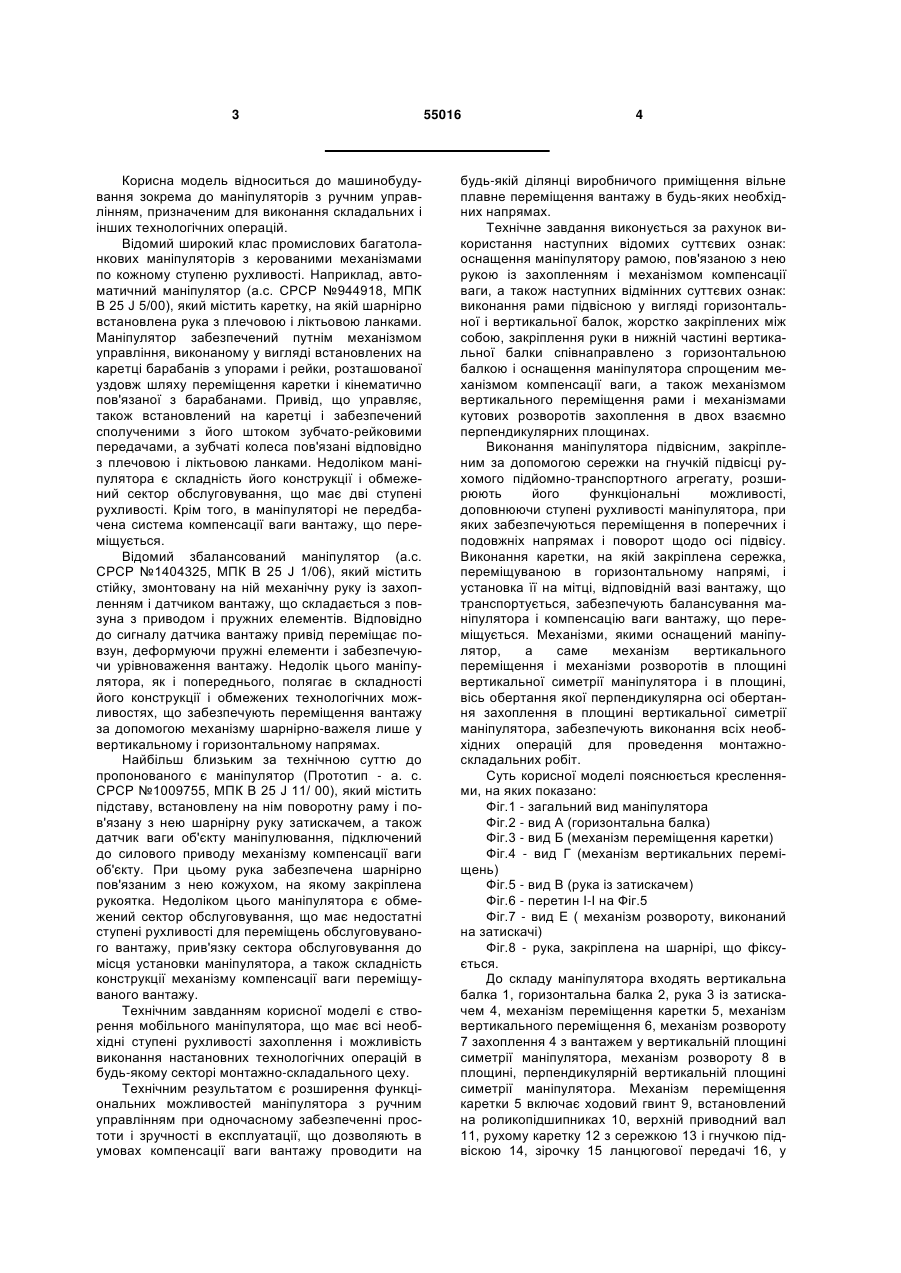
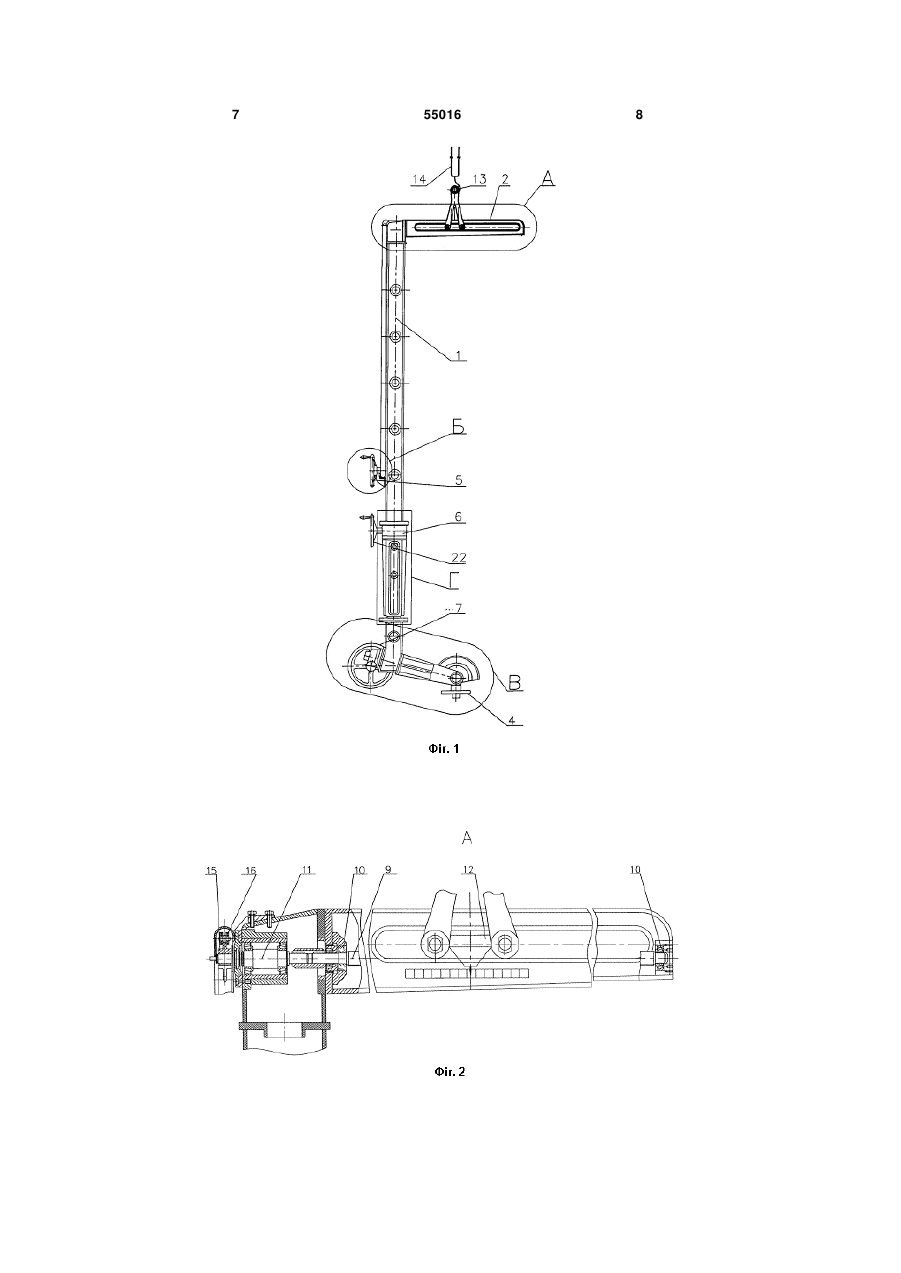
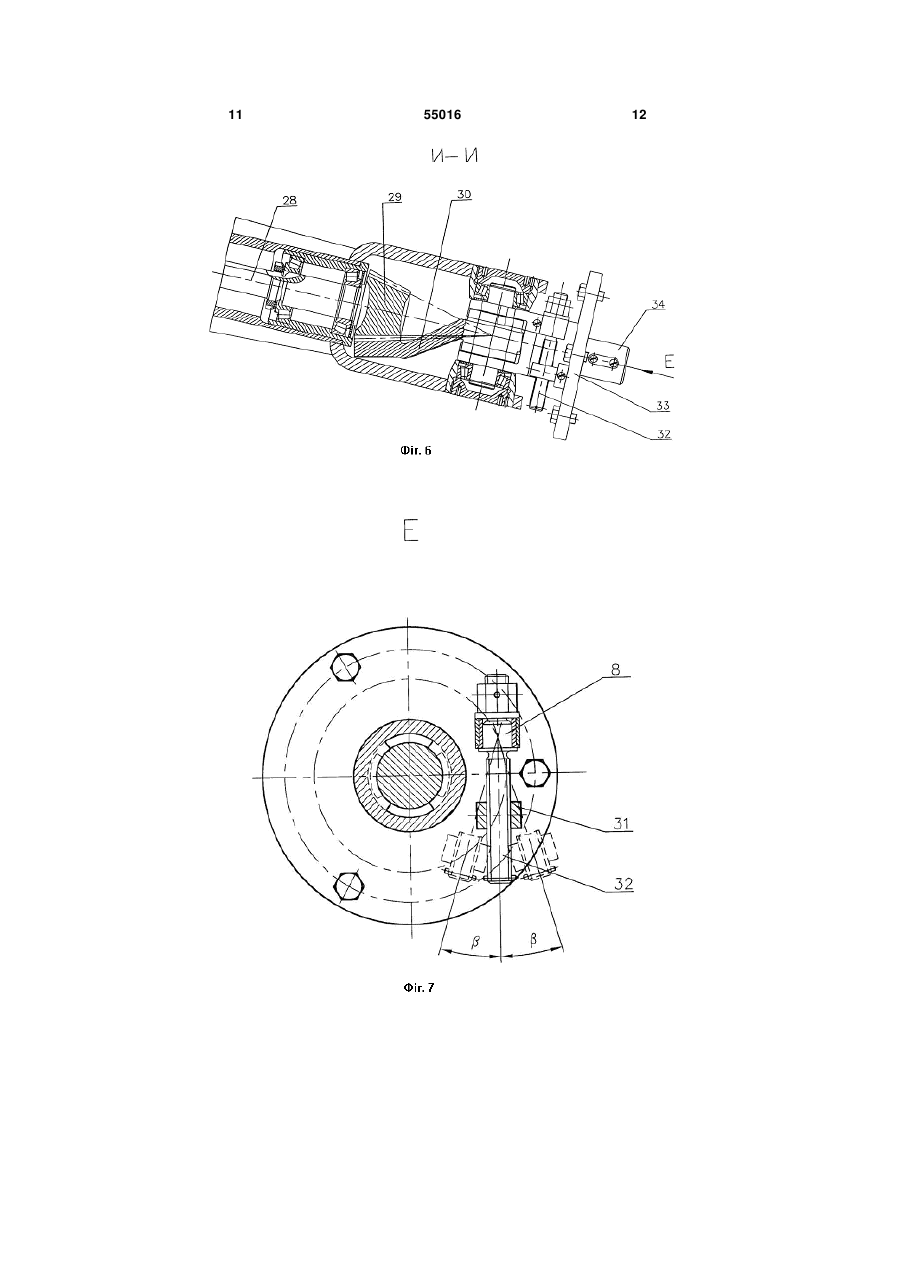
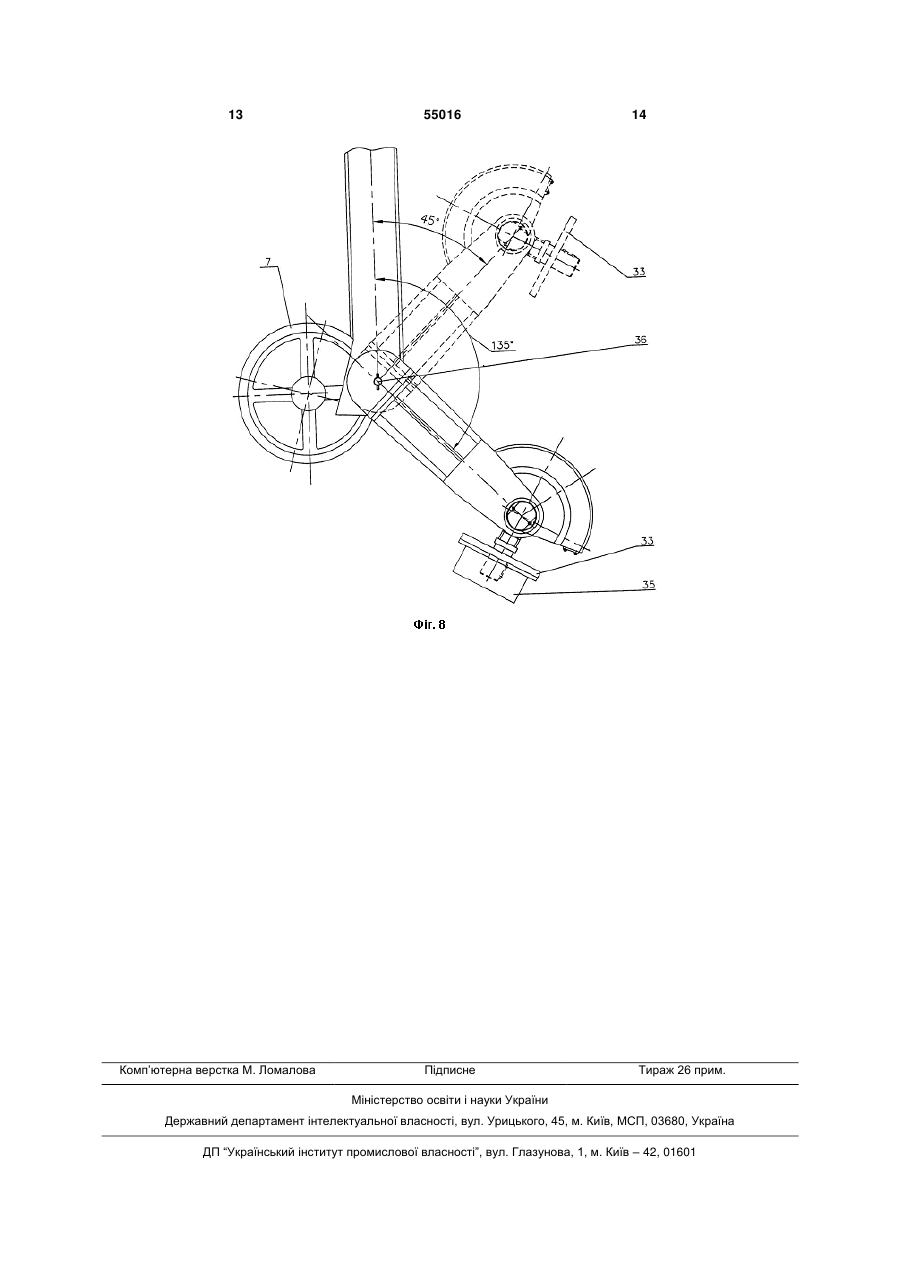
1. Маніпулятор, що містить раму, пов'язану з нею руку із затискачем і механізм компенсації ваги, який відрізняється тим, що рама виконана підвісною у вигляді горизонтальної і вертикальної балок, жорстко закріплених між собою краями під прямим кутом, рука закріплена до нижнього краю вертикальної балки співнаправлено з горизонтальною балкою, при цьому рама забезпечена механізмами її вертикального переміщення і кутового розвороту затискача у вертикальній площині симетрії маніпулятора, а затискач оснащене механізмом повороту, вісь обертання якого перпендикулярна осі обертання затискача у вертикальній площині симетрії маніпулятора. 2. Маніпулятор за п. 1, який відрізняється тим, що він змонтований на гнучкій підвісці, наприклад, за допомогою серги, на рухомому підйомнотранспортному агрегаті або кран-балці. 3. Маніпулятор за п. 1, який відрізняється тим, що рука закріплена до вертикальної балки жорстко під кутом від 90 до 135°. 4. Маніпулятор за п. 1, який відрізняється тим, що рука закріплена до вертикальної балки на фіксуючому шарнірі, який забезпечує стабілізацію руки під кутом від 45 до 135° до вертикальної балки. 5. Маніпулятор за п. 1, який відрізняється тим, що виконавчий вузол механізму вертикального переміщення рами виконаний у вигляді черв'ячної передачі. 6. Маніпулятор за п. 1, який відрізняється тим, що механізм розвороту затискача у вертикальній площині виконаний у вигляді черв'ячної передачі. 2 (19) 1 3 Корисна модель відноситься до машинобудування зокрема до маніпуляторів з ручним управлінням, призначеним для виконання складальних і інших технологічних операцій. Відомий широкий клас промислових багатоланкових маніпуляторів з керованими механізмами по кожному ступеню рухливості. Наприклад, автоматичний маніпулятор (а.с. СРСР №944918, МПК В 25 J 5/00), який містить каретку, на якій шарнірно встановлена рука з плечовою і ліктьовою ланками. Маніпулятор забезпечений путнім механізмом управління, виконаному у вигляді встановлених на каретці барабанів з упорами і рейки, розташованої уздовж шляху переміщення каретки і кінематично пов'язаної з барабанами. Привід, що управляє, також встановлений на каретці і забезпечений сполученими з його штоком зубчато-рейковими передачами, а зубчаті колеса пов'язані відповідно з плечовою і ліктьовою ланками. Недоліком маніпулятора є складність його конструкції і обмежений сектор обслуговування, що має дві ступені рухливості. Крім того, в маніпуляторі не передбачена система компенсації ваги вантажу, що переміщується. Відомий збалансований маніпулятор (а.с. СРСР №1404325, МПК В 25 J 1/06), який містить стійку, змонтовану на ній механічну руку із захопленням і датчиком вантажу, що складається з повзуна з приводом і пружних елементів. Відповідно до сигналу датчика вантажу привід переміщає повзун, деформуючи пружні елементи і забезпечуючи урівноваження вантажу. Недолік цього маніпулятора, як і попереднього, полягає в складності його конструкції і обмежених технологічних можливостях, що забезпечують переміщення вантажу за допомогою механізму шарнірно-важеля лише у вертикальному і горизонтальному напрямах. Найбільш близьким за технічною суттю до пропонованого є маніпулятор (Прототип - а. с. СРСР №1009755, МПК В 25 J 11/ 00), який містить підставу, встановлену на нім поворотну раму і пов'язану з нею шарнірну руку затискачем, а також датчик ваги об'єкту маніпулювання, підключений до силового приводу механізму компенсації ваги об'єкту. При цьому рука забезпечена шарнірно пов'язаним з нею кожухом, на якому закріплена рукоятка. Недоліком цього маніпулятора є обмежений сектор обслуговування, що має недостатні ступені рухливості для переміщень обслуговуваного вантажу, прив'язку сектора обслуговування до місця установки маніпулятора, а також складність конструкції механізму компенсації ваги переміщуваного вантажу. Технічним завданням корисної моделі є створення мобільного маніпулятора, що має всі необхідні ступені рухливості захоплення і можливість виконання настановних технологічних операцій в будь-якому секторі монтажно-складального цеху. Технічним результатом є розширення функціональних можливостей маніпулятора з ручним управлінням при одночасному забезпеченні простоти і зручності в експлуатації, що дозволяють в умовах компенсації ваги вантажу проводити на 55016 4 будь-якій ділянці виробничого приміщення вільне плавне переміщення вантажу в будь-яких необхідних напрямах. Технічне завдання виконується за рахунок використання наступних відомих суттєвих ознак: оснащення маніпулятору рамою, пов'язаною з нею рукою із захопленням і механізмом компенсації ваги, а також наступних відмінних суттєвих ознак: виконання рами підвісною у вигляді горизонтальної і вертикальної балок, жорстко закріплених між собою, закріплення руки в нижній частині вертикальної балки співнаправлено з горизонтальною балкою і оснащення маніпулятора спрощеним механізмом компенсації ваги, а також механізмом вертикального переміщення рами і механізмами кутових розворотів захоплення в двох взаємно перпендикулярних площинах. Виконання маніпулятора підвісним, закріпленим за допомогою сережки на гнучкій підвісці рухомого підйомно-транспортного агрегату, розширюють його функціональні можливості, доповнюючи ступені рухливості маніпулятора, при яких забезпечуються переміщення в поперечних і подовжніх напрямах і поворот щодо осі підвісу. Виконання каретки, на якій закріплена сережка, переміщуваною в горизонтальному напрямі, і установка її на мітці, відповідній вазі вантажу, що транспортується, забезпечують балансування маніпулятора і компенсацію ваги вантажу, що переміщується. Механізми, якими оснащений маніпулятор, а саме механізм вертикального переміщення і механізми розворотів в площині вертикальної симетрії маніпулятора і в площині, вісь обертання якої перпендикулярна осі обертання захоплення в площині вертикальної симетрії маніпулятора, забезпечують виконання всіх необхідних операцій для проведення монтажноскладальних робіт. Суть корисної моделі пояснюється кресленнями, на яких показано: Фіг.1 - загальний вид маніпулятора Фіг.2 - вид А (горизонтальна балка) Фіг.3 - вид Б (механізм переміщення каретки) Фіг.4 - вид Г (механізм вертикальних переміщень) Фіг.5 - вид В (рука із затискачем) Фіг.6 - перетин І-І на Фіг.5 Фіг.7 - вид Е ( механізм розвороту, виконаний на затискачі) Фіг.8 - рука, закріплена на шарнірі, що фіксується. До складу маніпулятора входять вертикальна балка 1, горизонтальна балка 2, рука 3 із затискачем 4, механізм переміщення каретки 5, механізм вертикального переміщення 6, механізм розвороту 7 захоплення 4 з вантажем у вертикальній площині симетрії маніпулятора, механізм розвороту 8 в площині, перпендикулярній вертикальній площині симетрії маніпулятора. Механізм переміщення каретки 5 включає ходовий гвинт 9, встановлений на роликопідшипниках 10, верхній приводний вал 11, рухому каретку 12 з сережкою 13 і гнучкою підвіскою 14, зірочку 15 ланцюгової передачі 16, у 5 якої приводний вузол 17 складається з нижнього приводного валу 18, та відповідної зірочки 19, маховика 20 і захисного кожуха 21. Механізм вертикальних переміщень 6 включає приводний маховик 22, ходовий гвинт 23, черв'ячні колеса 24, циліндрову напрямну 25, роликів 26 і опори роликопідшипників 27. Механізм 7 розвороту захоплення 4 у вертикальній площині симетрії маніпулятора складається з валу 28, конічного колеса 29, конічного сектора 30. Механізм 8 розвороту затискачу 4 в площині, вісь обертання якої перпендикулярна осі обертання затискача у вертикальній площині симетрії маніпулятора, виконаний на затискача 4 і складається з рухомої гайки 31 і гвинта 32. Затискач 4 руки 3 виконаний у вигляді поворотної планшайби 33 із хвостовиком 34, на яку встановлюється вантаж 35. Рука може бути закріплена до вертикальної балки 1 на шарнірі 36, що фіксується, який забезпечує стабілізацію руки під нахилом від 45 до 135 градусів. Як видно з креслення, представленого на Фіг.8, установка руки на шарнірі 36, що фіксується, розширює зону, що обслуговується затискачем 4. Робота маніпулятора здійснюється таким чином. На планшайбу 31 затискача 4 руки 3 встановлюється і закріплюється вантаж 35 (наприклад, прилад системи управління), який в подальшому повинен бути заведений в люк для закріплення його на посадочних місцях приладового відсіку. Залежно від ваги встановленого на планшайбі 31 приладу, рухома каретка 12 переміщається по напрямній горизонтальної балки 2 до відмітки на тарованій шкалі, виконаній на зовнішній поверхні горизонтальної балки, відповідної вазі встановленого приладу. Переміщення забезпечується обертанням маховика 20 і ланцюговою передачею 16, 55016 6 які передають обертання на верхній приводний вал 11 і ходовий гвинт 9, каретки, що взаємодіють з гайкою, 12. Переміщення каретки 12 до відповідної мітки забезпечує компенсацію ваги приладу і приведення маніпулятора в рівноважний стан. Після цього урівноважений маніпулятор підводиться за допомогою крана до обслуговуваного люка приладового відсіку носія. Почерговими діями механізму вертикальних переміщень руки, механізмів розвороту захоплення в двох взаємно перпендикулярних площинах на кути, що забезпечують вільний вхід в отвір люка, затискач з приладом заводиться в отвір люка і необхідними переміщеннями і розворотами досягається посадка приладу на штирі опорних поверхонь силових кронштейнів приладового відсіку ракети-носія. Потім планшайбу 31 відстиковують від приладу (вантажу) 35 і затискач 4 виводиться з люка за допомогою розворотів і переміщень, що забезпечуються тими ж механізмами в зворотній послідовності. Таким чином, маніпулятор забезпечує проведення необхідних технологічних операцій щодо переміщення і монтажу обслуговуваного вантажу в умовах компенсації його ваги, характеризується раціональністю конструкції, зручністю в обслуговуванні, наявністю всіх необхідних ступенів рухливості і мобільністю, що дозволяє проведення монтажно-складальних робіт на будь-якій ділянці складального цеху. Це дозволяє операторові проводити вільне позиціонування вантажу із можливістю його просторової орієнтації, плавного перенесення та сполучення з посадочними поверхнями базових елементів, у даному випадку з установлювальними поверхнями силових кронштейнів приладового відсіку ракети-носія. 7 55016 8 9 55016 10 11 55016 12 13 Комп’ютерна верстка М. Ломалова 55016 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator
Автори англійськоюAvdeev Anatolii Oleksiiovych, Shapovalova Halyna Mykytivna, Kravchenko Vitalii Andriiovych, Kulihin Anatolii Mykhailovych, Drahomyretskyi Yulii Oleksandrovych, Vorotnikov Vitalii Anatoliiovych, Kushnir Maksym Mykolaiovych
Назва патенту російськоюМанипулятор
Автори російськоюАвдеев Анатолий Алексеевич, Шаповалова Галина Никитовна, Кравченко Виталий Андреевич, Кулигин Анатолий Михайлович, Драгомирецкий Юлий Александрович, Воротников Виталий Анатольевич, Кушнир Максим Николаевич
МПК / Мітки
МПК: B25J 11/00, B25J 1/00
Мітки: маніпулятор
Код посилання
<a href="https://ua.patents.su/7-55016-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор</a>
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Вігдергауз Леонід Павлович, Москаленко Олександр Володимирович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Бергер Еміль Григорович, Бергер Євгеній Емильович, Іванов Геннадій Олександрович, Табацков Вячеслав Петрович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Маніпулятор для зміни заглибного стакана на машині безперервного лиття заготівок
Номер патенту: 52122
Опубліковано: 10.08.2010
Автори: Пакін Володимир Арсентіович, Санжаревський Олег Васильович, Снежинський Олексій Ігоревич, Казаков Олександр Васильович
МПК: B22D 41/50
Мітки: лиття, заглибного, заготівок, безперервного, стакана, машини, зміни, маніпулятор
Формула / Реферат:
1 .Маніпулятор для зміни заглибного стакана на машині безперервного лиття заготівок, що містить штангу з гільзою для втримання стакана, механізми горизонтального та вертикального переміщення штанги, а також механізм повороту штанги, який відрізняється тим, що механізм повороту штанги виконаний у вигляді шарнірного дволанкового важільного механізму, одна ланка якого шарнірно з'єднана зі штангою, а друга ланка шарнірно з'єднана з механізмом...
Маніпулятор портативної радіостанції
Номер патенту: 30167
Опубліковано: 11.02.2008
Автор: Шепотько Павло Олександрович
МПК: H04B 1/44
Мітки: радіостанції, портативної, маніпулятор
Формула / Реферат:
Маніпулятор портативної радіостанції, що містить мікрофон, мікросхему і кнопку-тангенту, який відрізняється тим, що мікрофон і кнопка-тангента винесені за межі блока маніпулятора і з'єднані з ним провідною або безпровідною системою.
Маніпулятор для складання візка вантажного вагона
Номер патенту: 20017
Опубліковано: 15.01.2007
Автори: Панасенко Віталій Якович, Клименко Ірина Володимирівна
МПК: B25B 27/14, B60S 5/00, B65G 57/00
Мітки: вантажного, маніпулятор, вагона, візка, складання
Формула / Реферат:
Маніпулятор для складання візка вантажного вагона, що має змонтовані на рухомій платформі механізми захвату та переміщення фрикційних клинів, механізм переміщення пружин ресорного комплекту візка, причому вказаний механізм включає в себе розміщену на корпусі площадку, зв'язану з приводом її зворотно-поступального переміщення в зону розташування пружин, положення яких фіксується приливками у формі зрізаного конуса, а по висоті приливки вищі,...
Попередній патент: Електроклапан
Наступний патент: Пристрій для вимірювання температури
Випадковий патент: Лазня сухої пари (сауна)