Привід махового крила
Формула / Реферат
1. Привід махового крила, що включає корпус, на якому установлена енергетична установка, опуклі крила і ланки передачі руху від енергетичної установки до крил, який відрізняється тим, що ланки передачі руху виконані у вигляді двох установлених з можливістю повороту навколо своєї поздовжньої осі коліс, а у середині кожного колеса співвісно установлено в поперечних осях кільце, у середину якого установлений рухомий циліндр, поперечна вісь якого перпендикулярна поперечній осі кільця, причому до верхніх виступних торців циліндрів закріплені лонжерони крил, направлені в протилежні боки, а всередині циліндрів вільно установлені зрізані сферичні обойми, поєднані підшипниками з ексцентриками, жорстко закріпленими на привідних валах, з'єднаних з енергетичною установкою через розподільну коробку, причому привідні вали ексцентриків оснащені механізмом поздовжнього пересування і підпружинені.
2. Привід за п. 1, який відрізняється тим, що кожне колесо виконано з зубчастим сектором, що входить в зачеплення з підпружиненою зубчастою рейкою або шестірнею, оснащеною механізмом пересування.
3. Привід за п. 1, який відрізняється тим, що ексцентрики привідних валів зміщені по фазі один відносно одного на величину кута приблизно 180 градусів.
4. Привід за п. 1, який відрізняється тим, що поперечні осі кілець і циліндрів підпружинені.
Текст
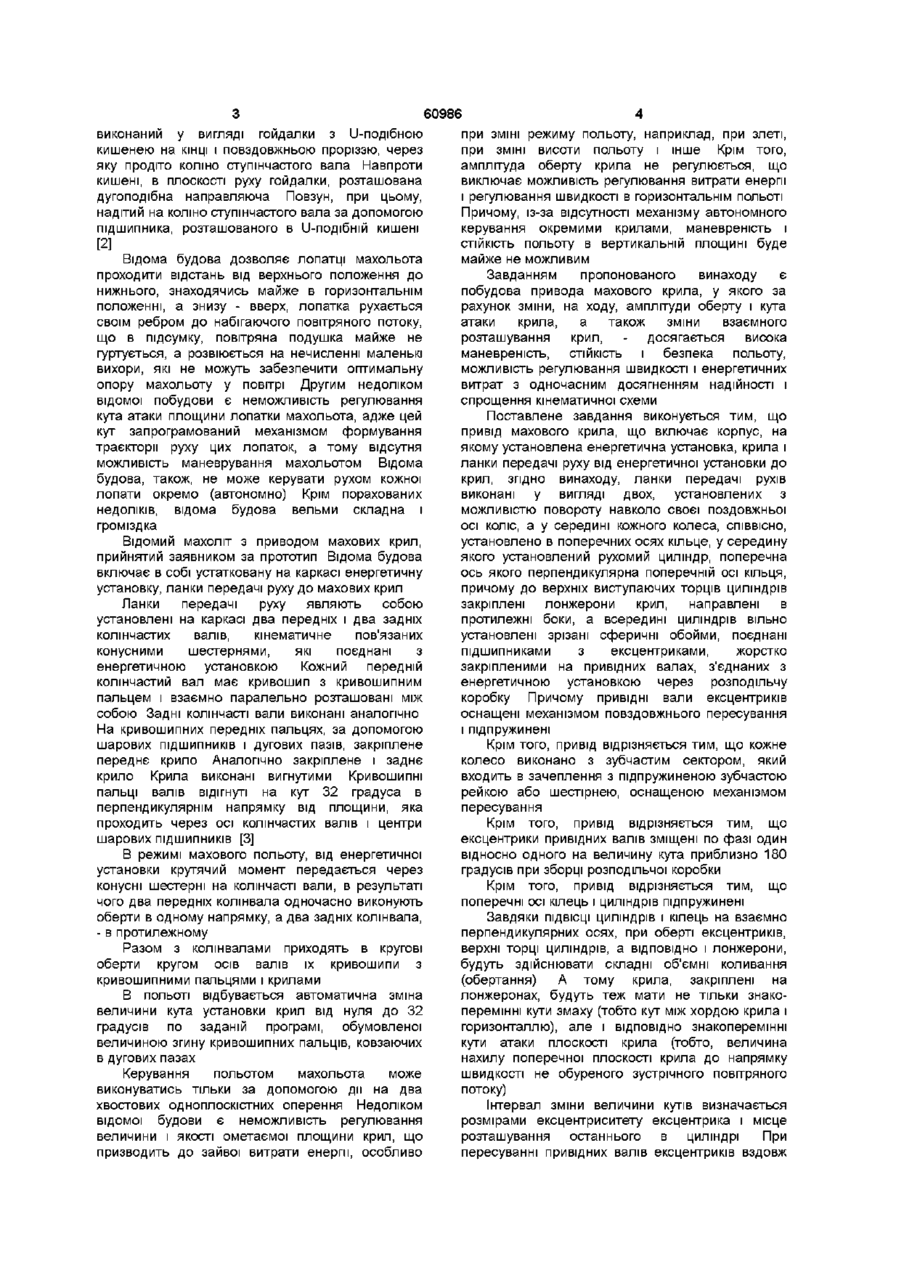
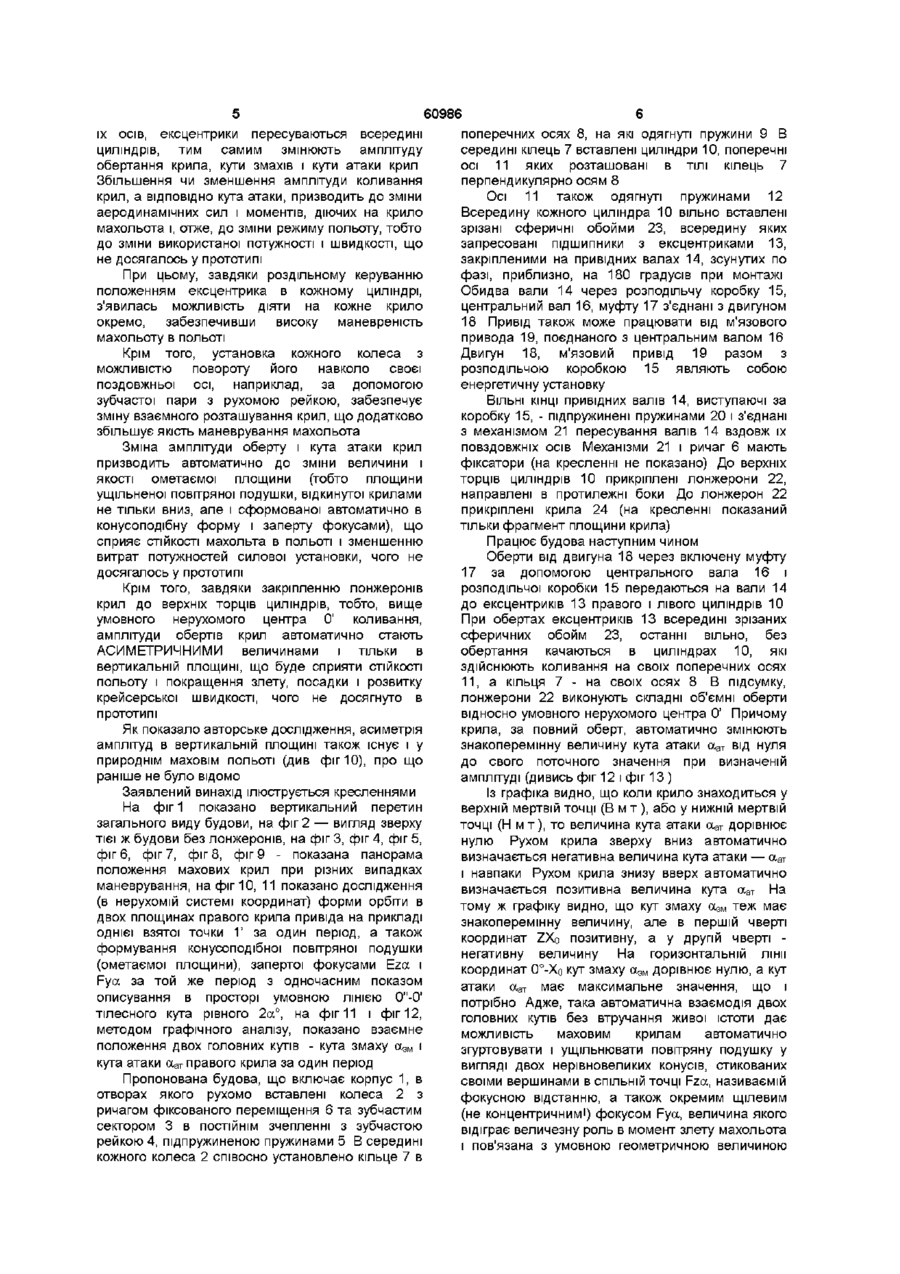
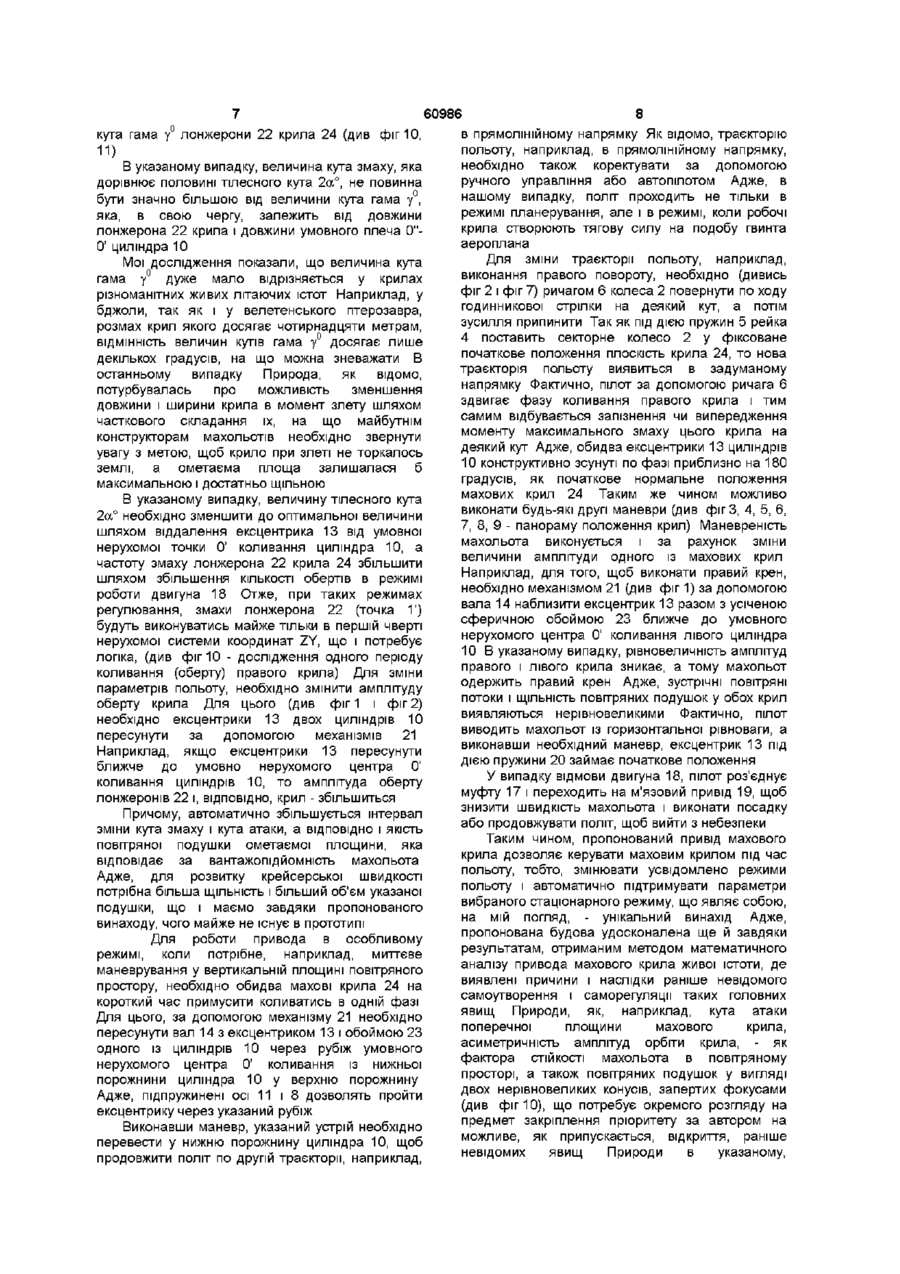
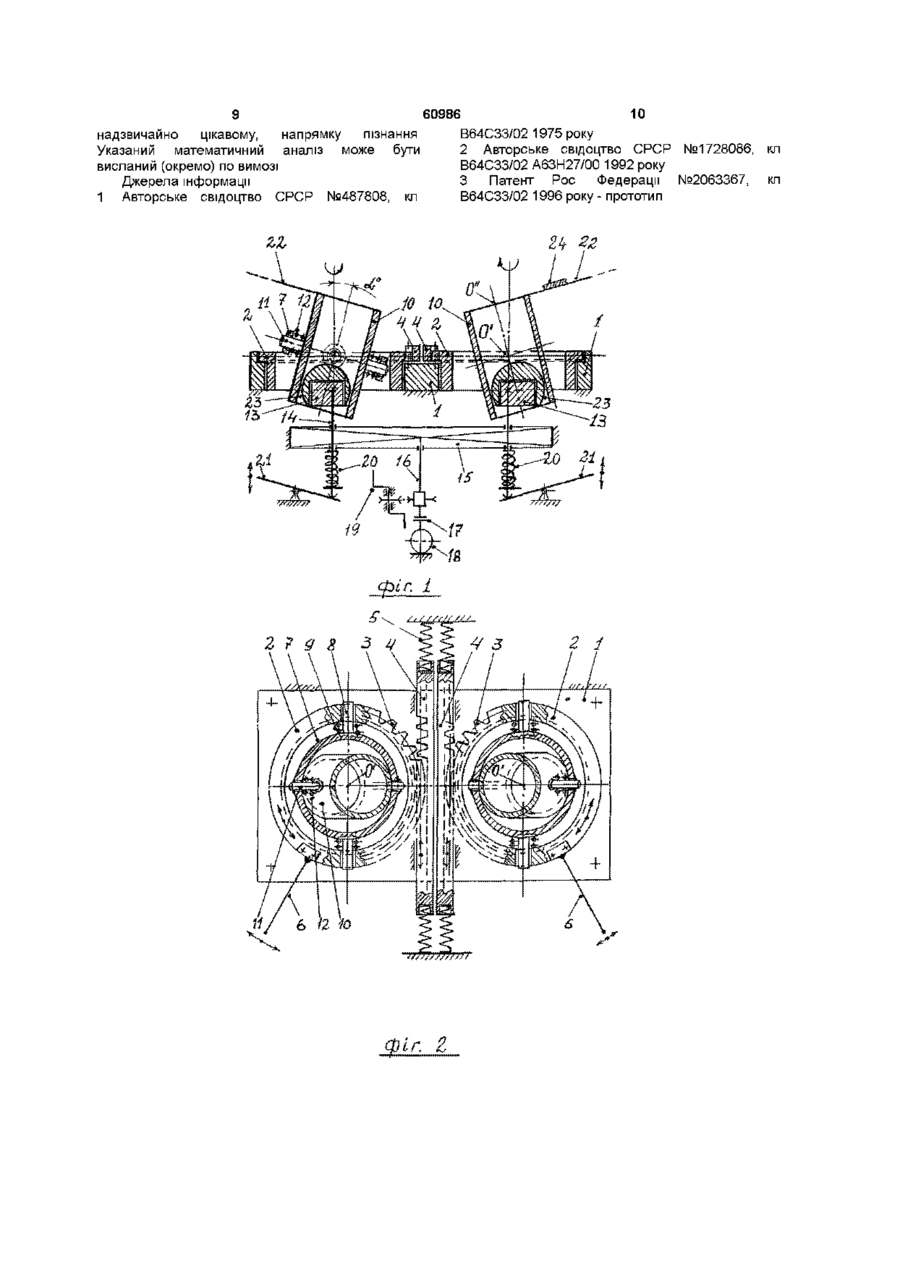
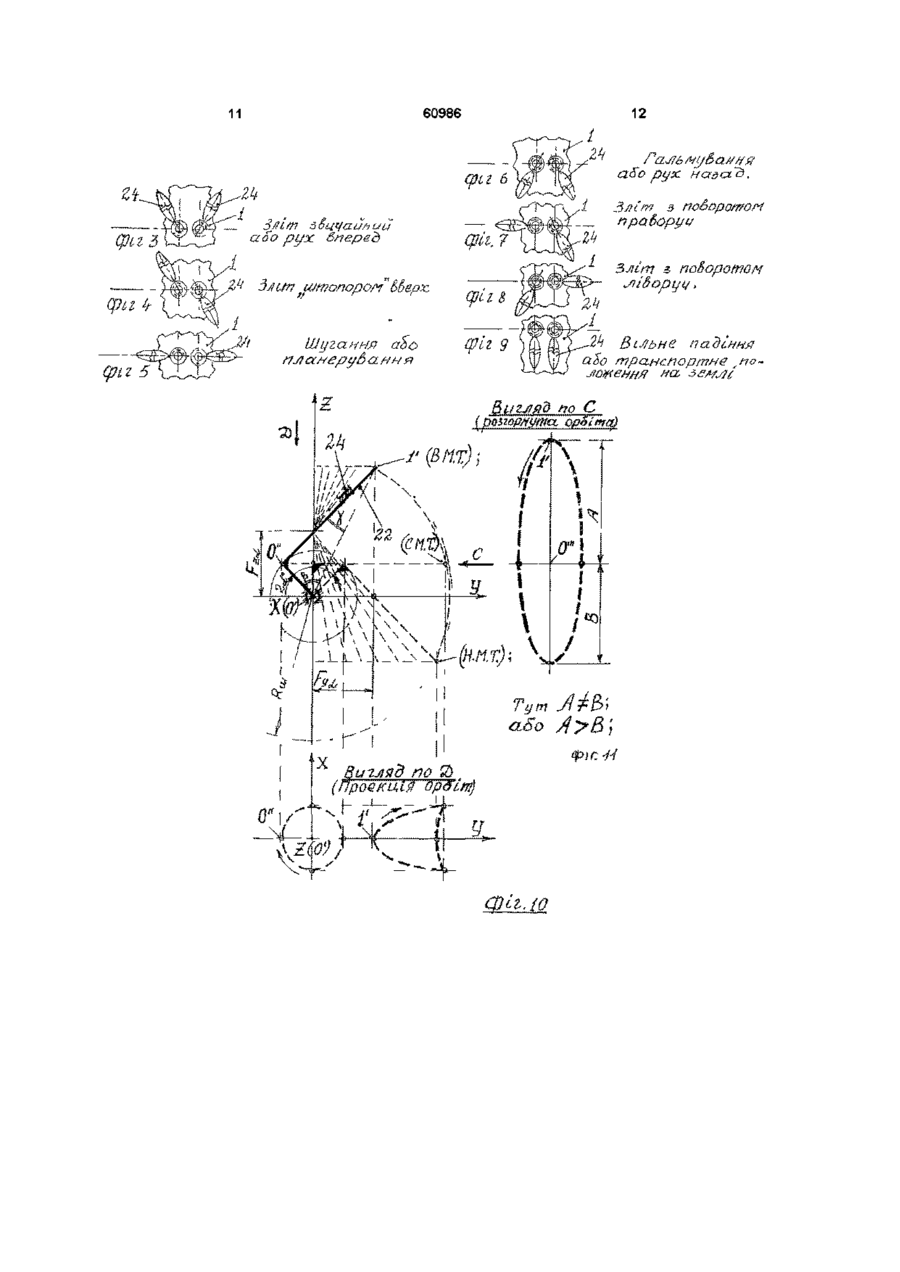
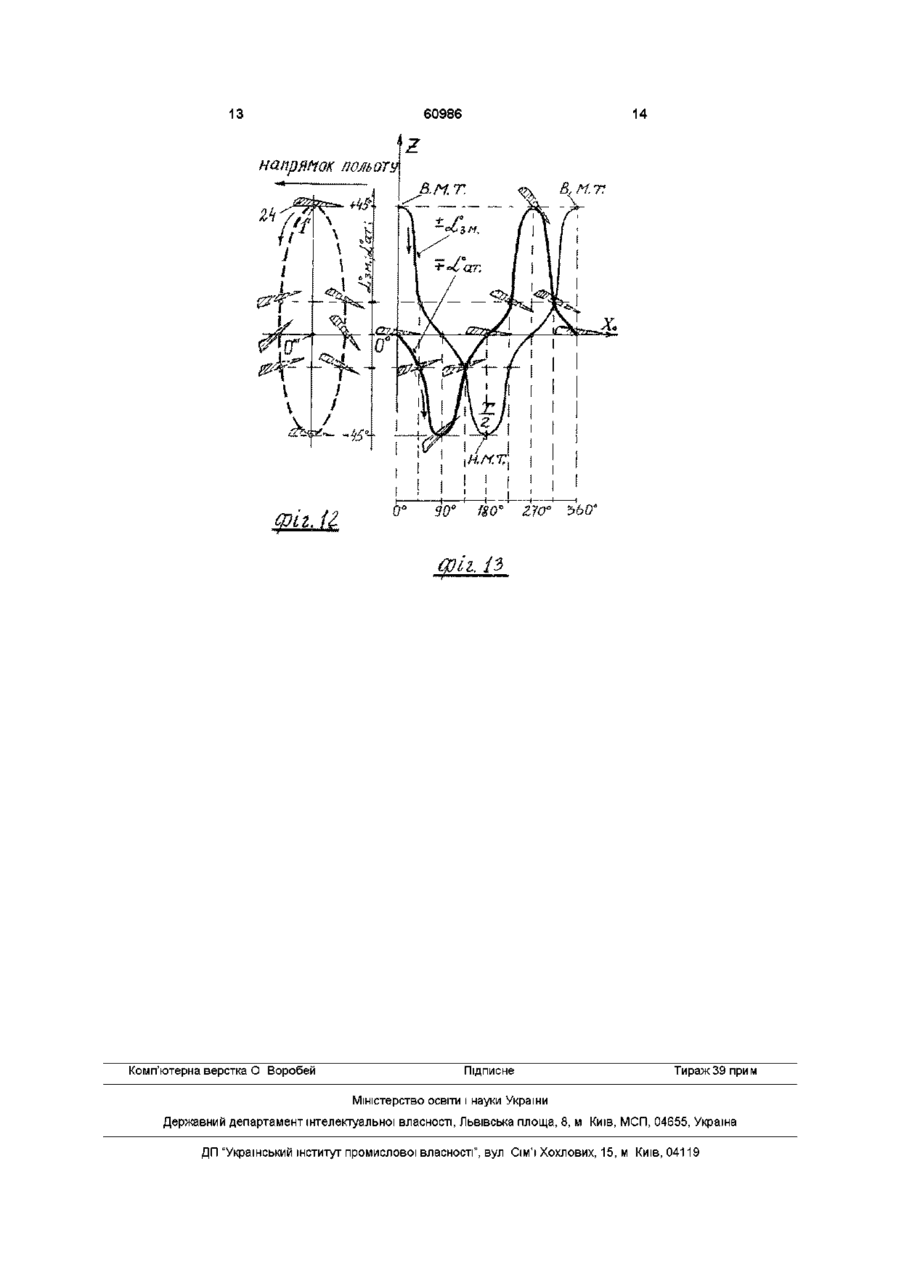
1 Привід махового крила, що включає корпус, на якому установлена енергетична установка, опуклі крила і ланки передачі руху від енергетичної установки до крил, який відрізняється тим, що ланки передачі рухів виконані у вигляді двох установлених з можливістю повороту навколо своєї поздовжньої осі коліс, а у середині кожного колеса СПІВВІСНО установлено в поперечних осях кільце, у середину якого установлений рухомий циліндр, поперечна вісь якого перпендикулярна поперечній осі кільця, причому до верхніх виступних торців циліндрів закріплені лонжерони крил, направлені в Винахід відноситься до авіаційної техніки, а саме, до літаючих апаратів з маховим крилом, в тому числі і до майбутніх повітроплавальних спортивних велосипедів Розвиток махольотів (орнітоптерів) направлено, в основному, на удосконалення привода махового крила, яке приблизило б якість своєї роботи до якості привода крила живої істоти Відомий привід крила орнітоптера, в якого силовий елемент махового крила з'єднаний з колінчастим валом за допомогою кардана, коліно якого виконано у вигляді частини циліндричної спрямованої спіралі На силовім елементі установлена, з можливістю пересуватися вздовж його, сферична опора, яка зафіксована в корпусі орнітоптера Колінвал, за допомогою муфти, з'єднаний з двигуном через редуктор [1] Величина кута атаки крила і величина амплітуди змаху крила визначається кутом нахилу коліна кардана А якщо, умовно, помістити будову в нерухому систему координат (з метою виявлення характеру траєкторії вибраної точки крила за один період коливання), то приходимо до висновку, що протилежні боки, а всередині циліндрів вільно установлені зрізані сферичні обойми, поєднані підшипниками з ексцентриками, жорстко закріпленими на привідних валах, з'єднаних з енергетичною установкою через розподільчу коробку, причому привідні вали ексцентриків оснащені механізмом поздовжнього пересування і підпружинені 2 Привід за п 1, який відрізняється тим, що кожне колесо виконано з зубчастим сектором, вхідним в зачеплення з підпружиненою зубчастою рейкою або шестірнею, оснащеною механізмом пересування 3 Привід за п 1, який відрізняється тим, що ексцентрики привідних валів зміщені по фазі один відносно одного на величину кута приблизно 180 градусів при зборці розподільчої коробки 4 Привід за п 1, який відрізняється тим, що поперечні осі кілець і циліндрів підпружинені характер цієї траєкторії (орбіти) залежить від ЛІНІЙНИХ розмірів середнього радіуса коліна, максимального розмаху крила і відстані від осі колінвала до сферичної опори А так як всі ЛІНІЙНІ розміри фіксовані конструктивно, то амплітуда змаху крила не регулюється, кут атаки поперечної площини крила знакоперемінно змінюється, що і потрібно, але тільки в заданім інтервалі, атому не регулюється В підсумку, відомий привід махового крила не може забезпечити маневреність орнітоптеру і, ВІДПОВІДНО, не буде реагувати на повітряні потоки, які ніколи не бувають стабільними Відома також будова привода лопат моделі махольота, утримуючий корпус, на якім вмонтований двигун, а через варіатор з'єднаний з ступінчастим валом, КІНЦІ ЯКОГО зігнуті, де на підшипниках закріплені лопати (крила) На згині коліна ступінчастого вала установлений кільцевий карданний шарнір, одна пара ланок якого жорстко пов'язана з основою лопати, а друга - жорстко пов'язана з повзуном механізму формування траєкторії руху кожної лопати Цей механізм (О 00 о> о (О 60986 при ЗМІНІ режиму польоту, наприклад, при злеті, при ЗМІНІ висоти польоту і інше Крім того, амплітуда оберту крила не регулюється, що виключає можливість регулювання витрати енергії і регулювання швидкості в горизонтальнім польоті Причому, із-за відсутності механізму автономного керування окремими крилами, маневреність і СТІЙКІСТЬ польоту в вертикальній площині буде майже не можливим Завданням пропонованого винаходу є побудова привода махового крила, у якого за рахунок зміни, на ходу, амплітуди оберту і кута атаки крила, а також зміни взаємного розташування крил, - досягається висока маневреність, СТІЙКІСТЬ І безпека польоту, можливість регулювання швидкості і енергетичних витрат з одночасним досягненням надійності і спрощення кінематичної схеми Поставлене завдання виконується тим, що привід махового крила, що включає корпус, на якому установлена енергетична установка, крила і ланки передачі руху від енергетичної установки до крил, згідно винаходу, ланки передачі рухів виконані у вигляді двох, установлених з можливістю повороту навколо своєї поздовжньої осі коліс, а у середині кожного колеса, СПІВВІСНО, установлено в поперечних осях кільце, у середину Відомий махоліт з приводом махових крил, якого установлений рухомий циліндр, поперечна прийнятий заявником за прототип Відома будова ось якого перпендикулярна поперечній осі кільця, включає в собі устатковану на каркасі енергетичну причому до верхніх виступаючих торців циліндрів установку, ланки передачі руху до махових крил закріплені лонжерони крил, направлені в Ланки передачі руху являють собою протилежні боки, а всередині циліндрів вільно установлені на каркасі два передніх і два задніх установлені зрізані сферичні обойми, поєднані колінчастих валів, кінематичне пов'язаних підшипниками з ексцентриками, жорстко конусними шестернями, які поєднані з закріпленими на привідних валах, з'єднаних з енергетичною установкою Кожний передній енергетичною установкою через розподільчу колінчастий вал має кривошип з кривошипним коробку Причому привідні вали ексцентриків пальцем і взаємно паралельно розташовані між оснащені механізмом повздовжнього пересування собою Задні колінчасті вали виконані аналогічно і підпружинені На кривошипних передніх пальцях, за допомогою шарових ПІДШИПНИКІВ і дугових пазів, закріплене Крім того, привід відрізняється тим, що кожне переднє крило Аналогічно закріплене і заднє колесо виконано з зубчастим сектором, який крило Крила виконані вигнутими Кривошипні входить в зачеплення з підпружиненою зубчастою пальці валів відігнуті на кут 32 градуса в рейкою або шестірнею, оснащеною механізмом перпендикулярнім напрямку від площини, яка пересування проходить через осі колінчастих валів і центри Крім того, привід відрізняється тим, що шарових ПІДШИПНИКІВ [3] ексцентрики привідних валів зміщені по фазі один відносно одного на величину кута приблизно 180 В режимі махового польоту, від енергетичної градусів при зборці розподільчої коробки установки крутячий момент передається через конусні шестерні на колінчасті вали, в результаті Крім того, привід відрізняється тим, що чого два передніх колінвала одночасно виконують поперечні осі кілець і циліндрів підпружинені оберти в одному напрямку, а два задніх колінвала, Завдяки ПІДВІСЦІ циліндрів і кілець на взаємно - в протилежному перпендикулярних осях, при оберті ексцентриків, верхні торці циліндрів, а ВІДПОВІДНО І лонжерони, Разом з колінвалами приходять в кругові будуть здійснювати складні об'ємні коливання оберти кругом осів валів їх кривошипи з (обертання) А тому крила, закріплені на кривошипними пальцями і крилами лонжеронах, будуть теж мати не тільки знакоВ польоті відбувається автоматична зміна перемінні кути змаху (тобто кут між хордою крила і величини кута установки крил від нуля до 32 горизонталлю), але і ВІДПОВІДНО знакоперемінні градусів по заданій програмі, обумовленої кути атаки плоскості крила (тобто, величина величиною згину кривошипних пальців, ковзаючих нахилу поперечної плоскості крила до напрямку в дугових пазах швидкості не обуреного зустрічного повітряного Керування польотом махольота може потоку) виконуватись тільки за допомогою дії на два хвостових одноплоскістних оперення Недоліком Інтервал зміни величини кутів визначається відомої будови є неможливість регулювання розмірами ексцентриситету ексцентрика і місце величини і якості ометаємої площини крил, що розташування останнього в циліндрі При призводить до зайвої витрати енергії, особливо пересуванні привідних валів ексцентриків вздовж виконаний у вигляді гойдалки з U-подібною кишенею на КІНЦІ і повздовжньою проріззю, через яку продіто коліно ступінчастого вала Навпроти кишені, в плоскості руху гойдалки, розташована дугоподібна направляюча Повзун, при цьому, надітий на коліно ступінчастого вала за допомогою підшипника, розташованого в U-подібній кишені [2] Відома будова дозволяє лопатці махольота проходити відстань від верхнього положення до нижнього, знаходячись майже в горизонтальнім положенні, а знизу - вверх, лопатка рухається своїм ребром до набігаючого повітряного потоку, що в підсумку, повітряна подушка майже не гуртується, а розвіюється на нечисленні маленькі вихори, які не можуть забезпечити оптимальну опору махольоту у повітрі Другим недоліком відомої побудови є неможливість регулювання кута атаки площини лопатки махольота, адже цей кут запрограмований механізмом формування траєкторії руху цих лопаток, а тому відсутня можливість маневрування махольотом Відома будова, також, не може керувати рухом кожної лопати окремо (автономно) Крім порахованих недоліків, відома будова вельми складна і громіздка 60986 поперечних осях 8, на які одягнуті пружини 9 В їх осів, ексцентрики пересуваються всередині середині кілець 7 вставлені циліндри 10, поперечні циліндрів, тим самим змінюють амплітуду осі 11 яких розташовані в ТІЛІ кілець 7 обертання крила, кути змахів і кути атаки крил перпендикулярно осям 8 Збільшення чи зменшення амплітуди коливання крил, а ВІДПОВІДНО кута атаки, призводить до зміни Осі 11 також одягнуті пружинами 12 аеродинамічних сил і моментів, діючих на крило Всередину кожного циліндра 10 вільно вставлені махольота і, отже, до зміни режиму польоту, тобто зрізані сферичні обойми 23, всередину яких до зміни використаної потужності і швидкості, що запресовані підшипники з ексцентриками 13, не досягалось у прототипі закріпленими на привідних валах 14, зсунутих по При цьому, завдяки роздільному керуванню фазі, приблизно, на 180 градусів при монтажі положенням ексцентрика в кожному циліндрі, Обидва вали 14 через розподільчу коробку 15, з'явилась можливість діяти на кожне крило центральний вал 16, муфту 17 з'єднані з двигуном окремо, забезпечивши високу маневреність 18 Привід також може працювати від м'язового махольоту в польоті привода 19, поєднаного з центральним валом 16 Крім того, установка кожного колеса з Двигун 18, м'язовий привід 19 разом з можливістю повороту його навколо своєї розподільчою коробкою 15 являють собою поздовжньої осі, наприклад, за допомогою енергетичну установку зубчастої пари з рухомою рейкою, забезпечує ВІЛЬНІ КІНЦІ привідних валів 14, виступаючі за зміну взаємного розташування крил, що додатково коробку 15, - підпружинені пружинами 20 і з'єднані збільшує якість маневрування махольота з механізмом 21 пересування валів 14 вздовж їх Зміна амплітуди оберту і кута атаки крил повздовжніх осів Механізми 21 і ричаг 6 мають призводить автоматично до зміни величини і фіксатори (на кресленні не показано) До верхніх якості ометаємої площини (тобто площини торців циліндрів 10 прикріплені лонжерони 22, ущільненої повітряної подушки, відкинутої крилами направлені в протилежні боки До лонжерон 22 не тільки вниз, але і сформованої автоматично в прикріплені крила 24 (на кресленні показаний конусоподібну форму і заперту фокусами), що тільки фрагмент площини крила) сприяє СТІЙКОСТІ махольта в польоті і зменшенню Працює будова наступним чином витрат потужностей силової установки, чого не Оберти від двигуна 18 через включену муфту досягалось у прототипі 17 за допомогою центрального вала 16 і Крім того, завдяки закріпленню лонжеронів розподільчої коробки 15 передаються на вали 14 крил до верхніх торців циліндрів, тобто, вище до ексцентриків 13 правого і лівого циліндрів 10 умовного нерухомого центра 0' коливання, При обертах ексцентриків 13 всередині зрізаних амплітуди обертів крил автоматично стають сферичних обойм 23, останні вільно, без АСИМЕТРИЧНИМИ величинами і тільки в обертання качаються в циліндрах 10, які вертикальній площині, що буде сприяти СТІЙКОСТІ здійснюють коливання на своїх поперечних осях польоту і покращення злету, посадки і розвитку 11, а кільця 7 - на своїх осях 8 В підсумку, крейсерської швидкості, чого не досягнуто в лонжерони 22 виконують складні об'ємні оберти прототипі відносно умовного нерухомого центра 0' Причому Як показало авторське дослідження, асиметрія крила, за повний оберт, автоматично змінюють амплітуд в вертикальній площині також існує і у знакоперемінну величину кута атаки а а т від нуля природнім маховім польоті (див фіг 10), про що до свого поточного значення при визначеній раніше не було відомо амплітуді (дивись фіг 12 і фіг 13 ) Заявлений винахід ілюструється кресленнями Із графіка видно, що коли крило знаходиться у На фіг 1 показано вертикальний перетин верхній мертвій точці (В м т ), або у нижній мертвій загального виду будови, на фіг 2 — вигляд зверху точці (Н м т ) , то величина кута атаки а а т дорівнює тієї ж будови без лонжеронів, на фіг 3, фіг 4, фіг 5, нулю Рухом крила зверху вниз автоматично фіг 6, фіг 7, фіг 8, фіг 9 - показана панорама визначається негативна величина кута атаки — а а т положення махових крил при різних випадках і навпаки Рухом крила знизу вверх автоматично маневрування, на фіг 10, 11 показано дослідження визначається позитивна величина кута а а т На (в нерухомій системі координат) форми орбіти в тому ж графіку видно, що кут змаху а з н теж має двох площинах правого крила привіда на прикладі знакоперемінну величину, але в першій чверті однієї взятої точки 1' за один період, а також координат ZXo позитивну, а у другій чверті формування конусоподібної повітряної подушки негативну величину На горизонтальній лінії (ометаємої площини), запертої фокусами Eza і координат 0°-Хо кут змаху а з н дорівнює нулю, а кут Fya за той же період з одночасним показом атаки а а т має максимальне значення, що і описування в просторі умовною ЛІНІЄЮ 0"-0' потрібно Адже, така автоматична взаємодія двох тілесного кута рівного 2а°, на фіг 11 і фіг 12, головних кутів без втручання живої істоти дає методом графічного аналізу, показано взаємне можливість маховим крилам автоматично положення двох головних кутів - кута змаху а з н і згуртовувати і ущільнювати повітряну подушку у кута атаки а а т правого крила за один період вигляді двох нерівновеликих конусів, стикованих Пропонована будова, що включає корпус 1, в своїми вершинами в СПІЛЬНІЙ точці Fza, називаємій отворах якого рухомо вставлені колеса 2 з фокусною відстанню, а також окремим щілевим ричагом фіксованого переміщення 6 та зубчастим (не концентричним!) фокусом Fya, величина якого сектором 3 в ПОСТІЙНІМ зчепленні з зубчастою відіграє величезну роль в момент злету махольота рейкою 4, підпружиненою пружинами 5 В середині і пов'язана з умовною геометричною величиною кожного колеса 2 співосно установлено кільце 7 в 60986 8 в прямолінійному напрямку Як відомо, траєкторію польоту, наприклад, в прямолінійному напрямку, необхідно також коректувати за допомогою ручного управління або автопілотом Адже, в нашому випадку, політ проходить не тільки в режимі планерування, але і в режимі, коли робочі крила створюють тягову силу на подобу гвинта аероплана Для зміни траєкторії польоту, наприклад, виконання правого повороту, необхідно (дивись фіг 2 і фіг 7) ричагом 6 колеса 2 повернути по ходу годинникової стрілки на деякий кут, а потім зусилля припинити Так як під дією пружин 5 рейка 4 поставить секторне колесо 2 у фіксоване початкове положення плоскість крила 24, то нова траєкторія польоту виявиться в задуманому напрямку Фактично, пілот за допомогою ричага 6 здвигає фазу коливання правого крила і тим самим відбувається запізнення чи випередження моменту максимального змаху цього крила на деякий кут Адже, обидва ексцентрики 13 циліндрів 10 конструктивно зсунуті по фазі приблизно на 180 градусів, як початкове нормальне положення махових крил 24 Таким же чином можливо В указаному випадку, величину тілесного кута виконати будь-які другі маневри (див фіг 3, 4, 5, 6, 2а° необхідно зменшити до оптимальної величини 7, 8, 9 - панораму положення крил) Маневреність шляхом віддалення ексцентрика 13 від умовної махольота виконується і за рахунок зміни нерухомої точки 0' коливання циліндра 10, а величини амплітуди одного із махових крил частоту змаху лонжерона 22 крила 24 збільшити Наприклад, для того, щоб виконати правий крен, шляхом збільшення КІЛЬКОСТІ обертів в режимі необхідно механізмом 21 (див фіг 1) за допомогою роботи двигуна 18 Отже, при таких режимах вала 14 наблизити ексцентрик 13 разом з усіченою регулювання, змахи лонжерона 22 (точка 1') сферичною обоймою 23 ближче до умовного будуть виконуватись майже тільки в першій чверті нерухомого центра 0' коливання лівого циліндра нерухомої системи координат ZY, що і потребує 10 В указаному випадку, рівновеличність амплітуд логіка, (див фіг 10 - дослідження одного періоду правого і лівого крила зникає, а тому махольот коливання (оберту) правого крила) Для зміни одержить правий крен Адже, зустрічні повітряні параметрів польоту, необхідно змінити амплітуду потоки і ЩІЛЬНІСТЬ повітряних подушок у обох крил оберту крила Для цього (див фіг 1 і фіг 2) виявляються нерівновеликими Фактично, пілот необхідно ексцентрики 13 двох циліндрів 10 виводить махольот із горизонтальної рівноваги, а пересунути за допомогою механізмів 21 виконавши необхідний маневр, ексцентрик 13 під Наприклад, якщо ексцентрики 13 пересунути дією пружини 20 займає початкове положення ближче до умовно нерухомого центра 0' коливання циліндрів 10, то амплітуда оберту У випадку відмови двигуна 18, пілот роз'єднує лонжеронів 22 і, ВІДПОВІДНО, крил - збільшиться муфту 17 і переходить на м'язовий привід 19, щоб знизити швидкість махольота і виконати посадку Причому, автоматично збільшується інтервал або продовжувати політ, щоб вийти з небезпеки зміни кута змаху і кута атаки, а ВІДПОВІДНО І ЯКІСТЬ Таким чином, пропонований привід махового повітряної подушки ометаємої площини, яка крила дозволяє керувати маховим крилом під час відповідає за вантажопідйомність махольота польоту, тобто, змінювати усвідомлено режими Адже, для розвитку крейсерської швидкості польоту і автоматично підтримувати параметри потрібна більша ЩІЛЬНІСТЬ І більший об'єм указаної вибраного стаціонарного режиму, що являє собою, подушки, що і маємо завдяки пропонованого на мій погляд, - унікальний винахід Адже, винаходу, чого майже не існує в прототипі пропонована будова удосконалена ще й завдяки Для роботи привода в особливому результатам, отриманим методом математичного режимі, коли потрібне, наприклад, миттєве аналізу привода махового крила живої істоти, де маневрування у вертикальній площині повітряного виявлені причини і наслідки раніше невідомого простору, необхідно обидва махові крила 24 на самоутворення і саморегуляції таких головних короткий час примусити коливатись в одній фазі явищ Природи, як, наприклад, кута атаки Для цього, за допомогою механізму 21 необхідно поперечної площини махового крила, пересунути вал 14 з ексцентриком 13 і обоймою 23 асиметричність амплітуд орбіти крила, - як одного із циліндрів 10 через рубіж умовного фактора СТІЙКОСТІ махольота в повітряному нерухомого центра 0' коливання із нижньої просторі, а також повітряних подушок у вигляді порожнини циліндра 10 у верхню порожнину двох нерівновеликих конусів, запертих фокусами Адже, підпружинені осі 11 і 8 дозволять пройти (див фіг 10), що потребує окремого розгляду на ексцентрику через указаний рубіж предмет закріплення пріоритету за автором на Виконавши маневр, указаний устрій необхідно можливе, як припускається, відкриття, раніше перевести у нижню порожнину циліндра 10, щоб невідомих явищ Природи в указаному, продовжити політ по другій траєкторії, наприклад, кута гама у лонжерони 22 крила 24 (див фіг 10, 11) В указаному випадку, величина кута змаху, яка дорівнює половині тілесного кута 2а°, не повинна 0 бути значно більшою від величини кута гама у , яка, в свою чергу, залежить від довжини лонжерона 22 крила і довжини умовного плеча 0"0' циліндра 10 Мої дослідження показали, що величина кута 0 гама у дуже мало відрізняється у крилах різноманітних живих літаючих істот Наприклад, у бджоли, так як і у велетенського птерозавра, розмах крил якого досягає чотирнадцяти метрам, 0 ВІДМІННІСТЬ величин кутів гама у досягає лише декількох градусів, на що можна зневажати В останньому випадку Природа, як відомо, потурбувалась про можливість зменшення довжини і ширини крила в момент злету шляхом часткового складання їх, на що майбутнім конструкторам махольотів необхідно звернути увагу з метою, щоб крило при злеті не торкалось землі, а ометаєма площа залишалася б максимальною і достатньо щільною 10 9 60986 надзвичайно цікавому, напрямку пізнання В64СЗЗ/021975 року 2 Авторське свідоцтво СРСР №1728086, кл Указаний математичний аналіз може бути В64СЗЗ/02 А63Н27/00 1992 року висланий (окремо) по вимозі 3 Патент Рос Федерації №2063367, кп Джерела інформації 1 Авторське свідоцтво СРСР №487808, кп В64СЗЗ/021996 року - прототип 2 fJ7777777777 фіг. Z і 60986 11 12 Галь мі/&а##я або рух назсхЪ. ЗУ/Ш З б 6-І q а а о о рух і йґ7 и и бнеред 3/icm штопором" 3/и'т з поборотом Зліт з поборотом Шугання aSo б падіннл aSo транспортне поз і ложення Вигляд по С (рашряутсс opSimg} іТ \ . (НЛТ); \ І Туп, ЛФВ>\ а£о Виїляд по Я> (проекція ор&ш) у ,ч У фіг, to 13 60986 14 напрямок польот, Фіг, it фіі, Комп'ютерна верстка О Воробей ІЗ Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюFly wing drive
Автори англійськоюSerhiienko Volodymyr Yakovych
Назва патенту російськоюПривод махового крыла
Автори російськоюСергиенко Владимир Яковлевич
МПК / Мітки
МПК: B64C 33/00
Мітки: крила, махового, привід
Код посилання
<a href="https://ua.patents.su/7-60986-privid-makhovogo-krila.html" target="_blank" rel="follow" title="База патентів України">Привід махового крила</a>
Привід махаючого крила
Номер патенту: 52324
Опубліковано: 16.12.2002
Автор: Сілін Дмитро Юрійович
МПК: B64C 33/00
Мітки: крила, привід, махаючого
Формула / Реферат:
Привід махаючого крила, який складається з корпуса, редуктора, кривошипа і коромисел, який відрізняється тим, що в привід введено повідковий механізм із пружними вилками, а кривошипо-шатунний механізм перетворений у кулісно-сферичний механізм.
Привід махаючого крила
Номер патенту: 52483
Опубліковано: 16.12.2002
Автор: Сілін Дмитро Юрійович
МПК: B64C 33/00
Мітки: привід, крила, махаючого
Формула / Реферат:
Привід махаючого крила, що складається з корпусу, редуктора, кривошипів з пальцями і пружними вилками, коромисел, до яких кріпляться консолі крила і напрямних, який відрізняється тим, що осі коромисел разом з напрямними виконано поворотними відносно осі вала кривошипів.
Установка механізації крила великого звуження
Номер патенту: 54704
Опубліковано: 17.03.2003
Автор: Моргун Олександр Павлович
МПК: B64C 9/00, B64C 21/00
Мітки: великого, механізації, установка, звуження, крила
Формула / Реферат:
Установка механізації крила великого звуження, яка містить профільований робочий орган (типу поворотного носка крила), установлений на осі повороту упоперек напрямку польоту літака, в прибраному стані утворюючий з іншими частинами крила суцільний аеродинамічний профіль, яка відрізняється тим, що робочий орган механізації крила установлений в середній частині хорди крила, на осі повороту, а саме на задній (відносно напрямку польоту) частині...
Канали вирівнювання обтікання крила

Номер патенту: 5304
Опубліковано: 15.03.2005
Автор: Моргун Олександр Павлович
МПК: B64C 21/00
Мітки: вирівнювання, каналі, крила, обтікання
Формула / Реферат:
Канали вирівнювання обтікання крила, які є елементами конструкції крила, що містять вхідну, вихідну та середню проточну частини; з'єднуючі зони з підвищеним тиском на нижній поверхні крила з зонами початку відриву потоку при кутах атаки більших від критичних на верхній поверхні крила, які відрізняються тим, що вхідні і вихідні частини каналів повернуті на певні кути відносно середньої проточної частини в поперечному напрямку (відносно...
Форма в плані крила великого звуження літака

Номер патенту: 45535
Опубліковано: 15.04.2002
Автор: Моргун Олександр Павлович
МПК: B64C 3/10
Мітки: звуження, крила, плані, форма, літака, великого
Формула / Реферат:
Форма в плані крила великого звуження літака з передньою кромкою (наприклад еліптичної форми) і кореневою хордою, яка відрізняється тим, що задня кромка крила виконана у вигляді ломаної лінії, одна половина відрізків якої паралельна, а друга половина - перпендикулярна напрямку польоту літака, на відрізках ломаної лінії, паралельних напрямку польоту літака, установлені кінцеві шайби.
Попередній патент: Двопроменева поляризаційна призма
Наступний патент: Зубна щітка, що має ефективну конфігурацію щетини (варіанти)
Випадковий патент: Пристрій для введення інформації