Ймовірнісний фільтр
Номер патенту: 71892
Опубліковано: 25.07.2012
Автори: Меленті Євген Олександрович, Сидоренко Руслан Григорович, Коломійцев Олексій Володимирович, Челпанов Володимир Валентинович, Челпанов Артем Володимирович


Формула / Реферат
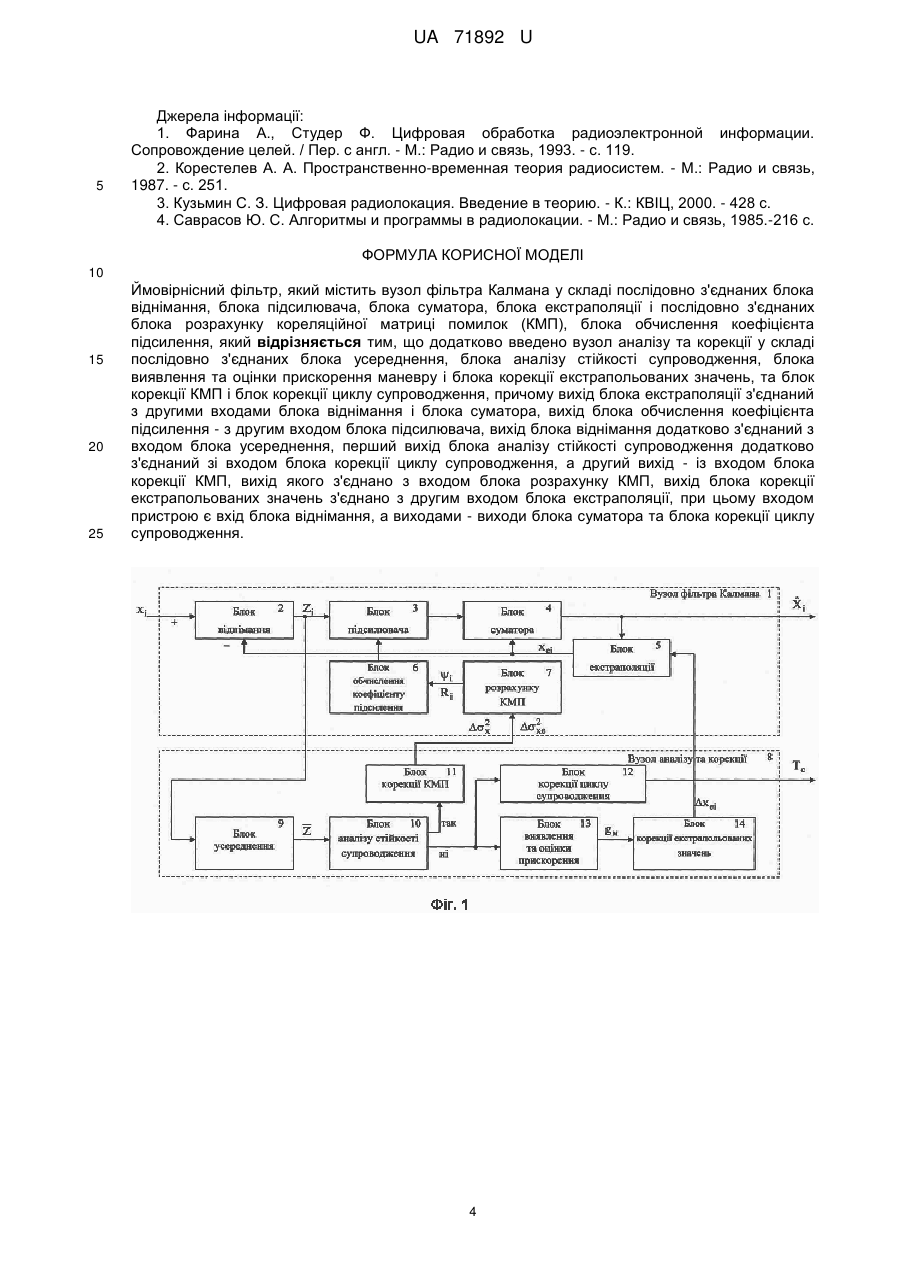
Ймовірнісний фільтр, який містить вузол фільтра Калмана у складі послідовно з'єднаних блока віднімання, блока підсилювача, блока суматора, блока екстраполяції і послідовно з'єднаних блока розрахунку кореляційної матриці помилок (КМП), блока обчислення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол аналізу та корекції у складі послідовно з'єднаних блока усереднення, блока аналізу стійкості супроводження, блока виявлення та оцінки прискорення маневру і блока корекції екстрапольованих значень, та блок корекції КМП і блок корекції циклу супроводження, причому вихід блока екстраполяції з'єднаний з другими входами блока віднімання і блока суматора, вихід блока обчислення коефіцієнта підсилення - з другим входом блока підсилювача, вихід блока віднімання додатково з'єднаний з входом блока усереднення, перший вихід блока аналізу стійкості супроводження додатково з'єднаний зі входом блока корекції циклу супроводження, а другий вихід - із входом блока корекції КМП, вихід якого з'єднано з входом блока розрахунку КМП, вихід блока корекції екстрапольованих значень з'єднано з другим входом блока екстраполяції, при цьому входом пристрою є вхід блока віднімання, а виходами - виходи блока суматора та блока корекції циклу супроводження.
Текст
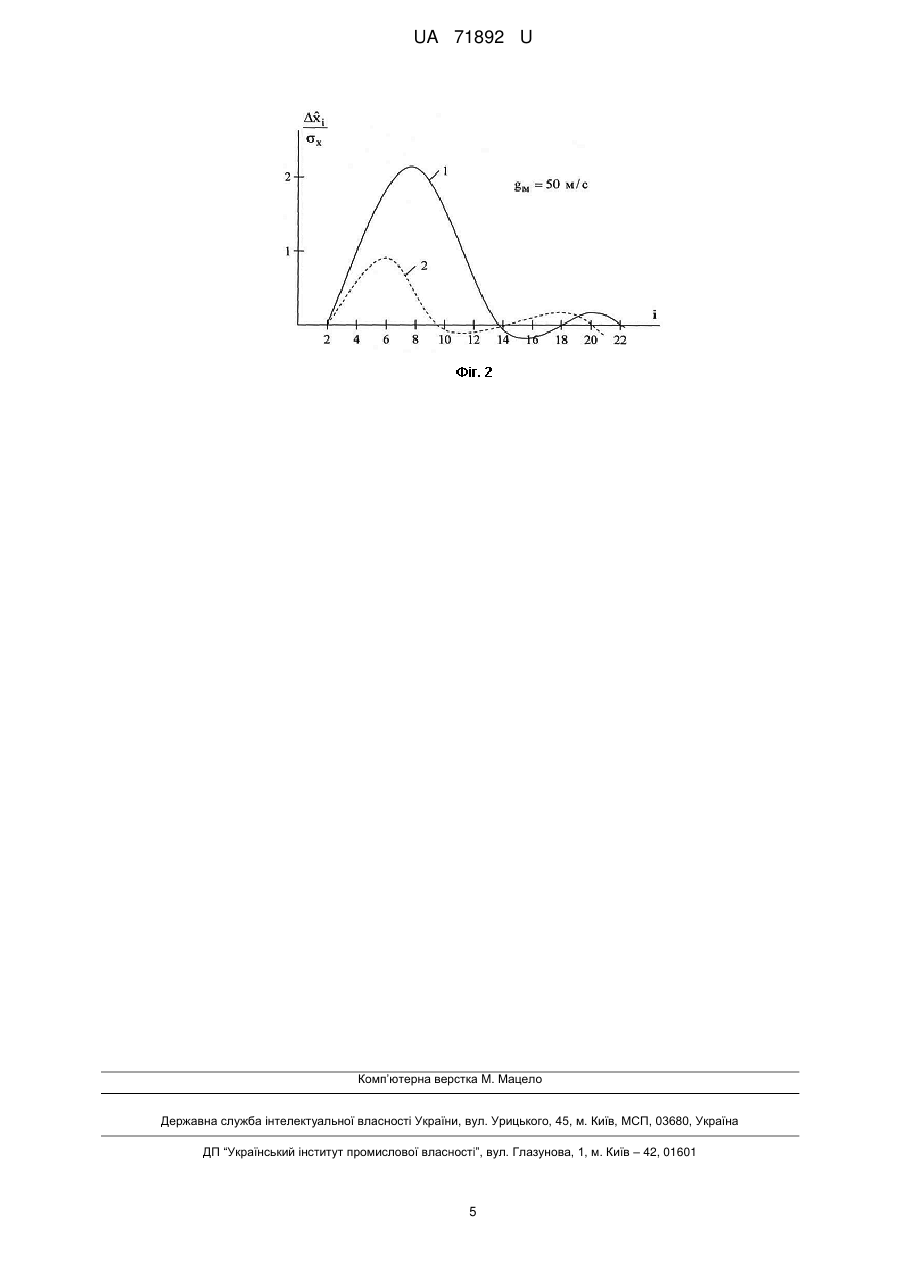
Реферат: Ймовірнісний фільтр містить вузол фільтра Калмана у складі послідовно з'єднаних блока віднімання, блока підсилювача, блока суматора, блока екстраполяції і послідовно з'єднаних блока розрахунку кореляційної матриці помилок (КМП), блока обчислення коефіцієнта підсилення. Додатково введено вузол аналізу та корекції у складі послідовно з'єднаних блока усереднення, блока аналізу стійкості супроводження, блока виявлення та оцінки прискорення маневру і блока корекції екстрапольованих значень, та блок корекції КМП і блок корекції циклу супроводження. UA 71892 U (12) UA 71892 U UA 71892 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до галузі радіолокації і може бути використана для оцінки параметрів траєкторії цілі з забезпеченням заданої ймовірності її стійкого супроводження в умовах невідповідності прийнятої моделі руху цілі реальної траєкторії, зокрема, при її маневрі. Відомий пристрій фільтрації параметрів траєкторії цілі - розширений фільтр Калмана [1], який містить блок фільтрації, блок обчислювання коефіцієнта підсилення фільтра та блок екстраполяції, в якому у порівнянні з лінійним фільтром Калмана забезпечується підвищення стійкості супроводження цілі за рахунок введення корекції значення оцінки параметра траєкторії в ланцюзі зворотного зв'язку. Недоліком даного пристрою є недостатня стійкість супроводження цілі, коли прийнята модель траєкторії цілі значно відрізняється від її реальної траєкторії, зокрема при інтенсивному маневрі цілі. Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є ймовірнісний фільтр [2], який в дискретному варіанті виконання містить вузол лінійного фільтра Калмана у складі послідовно з'єднаних блока віднімання, блока підсилювача, блока суматора, блока екстраполяції і послідовно з'єднаних блока розрахунку кореляційної матриці помилок (КМП), блока обчислення коефіцієнта підсилення та вузол усереднення помилок фільтрації у складі блоків віднімання, накопичення та усереднення. Недоліком фільтра-прототипу є те, що він не враховує поточні статистичні характеристики динамічних помилок фільтрації та не корегуює значення елементів КМП екстраполяції та КМП вимірювань. Це підвищує ймовірність зриву цілі з супроводження та помилки оцінок параметрів траєкторії. В основу корисної моделі поставлена задача створити ймовірнісний фільтр, як пристрій фільтрації та супроводження цілей, в якому введення нових блоків у складі вузла аналізу та корекції дозволить визначити регулярні складові значень помилок фільтрації, зокрема, за рахунок маневру цілі, оцінити ймовірність зриву цілі з супроводження та інтенсивність маневру і здійснити відповідну корекцію параметрів фільтра - коефіцієнту підсилення, елементів КМП екстраполяції, та уточнення поточних оцінок параметрів траєкторії цілі. Поставлена задача вирішується за рахунок того, що в ймовірнісний фільтр, який містить вузол фільтра Калмана у складі послідовно з'єднаних блока віднімання, блока підсилювача, блока суматора, блока екстраполяції і послідовно з'єднаних блока розрахунку КМП, блока обчислення коефіцієнту підсилення, замість вузла усереднення помилок фільтрації введено вузол аналізу і корекції у складі послідовно з'єднаних блока усереднення, блока аналізу стійкості супроводження, блока виявлення та оцінки прискорення маневру, блока корекції екстрапольованих значень, блока корекції КМП і блока корекції циклу супроводження. Вихід блока екстраполяції з'єднаний з другими входами блока віднімання і блока суматора. Вихід блока обчислення коефіцієнту підсилення - з другим входом блока підсилювача, вихід блока віднімання додатково з'єднаний з входом блока усереднення. Перший вихід блока аналізу стійкості супроводження додатково з'єднаний з входом блока корекції циклу супроводження, а другий вихід - із входом блока корекції КПМ, вихід якого з'єднаний з входом блока розрахунку КМП. Вихід блока корекції екстрапольованих значень з'єднаний з другим входом блока екстраполяції. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у підвищенні точності оцінок параметрів траєкторії цілі з забезпеченням заданої ймовірності попадання поточних позначок в строб супроводження, тобто забезпеченні необхідної стійкості супроводження, якщо прийнята модель руху цілі не відповідає її реальній траєкторії, зокрема, при маневрі цілі. На фіг. 1 приведена структурна схема запропонованого пристрою. На фіг. 2 показані результати моделювання, які демонструють зменшення помилок оцінок параметрів траєкторії цілі, якщо компенсуються регулярні складові динамічних помилок фільтрації при маневрі цілі. Запропонований ймовірнісний фільтр містить вузол фільтра Калмана 1 у складі послідовно з'єднаних блока віднімання 2, блока підсилювача 3, блока суматора 4, блока екстраполяції 5, а також послідовно з'єднаних блока розрахунку КМП 7 і блока обчислення коефіцієнта підсилення 6, а також вузол аналізу та корекції 8 у складі послідовно з'єднаних блока усереднення 9, блока аналізу стійкості супроводження 10, блока виявлення та оцінки прискорення маневру 13, блока корекції екстрапольованих значень 14, а також блока корекції КМП 11 і блока корекції циклу супроводження 12. Вихід блока екстраполяції з'єднаний із другими входами блока віднімання та блока суматора. Вихід блока обчислення коефіцієнту підсилення - з другим входом блока 1 UA 71892 U 5 10 15 20 підсилювача. Вихід блока віднімання додатково з'єднаний зі входом блока усереднення. Перший вихід блока аналізу стійкості супроводження додатково з'єднаний зі входом блока корекції циклу супроводження, а другий вихід - із входом блока корекції КМП, вихід якого з'єднано з входом блока розрахунку КМП. Вихід блока корекції екстрапольованих значень з'єднано з другим входом блока екстраполяції. Входом фільтра є вхід блока віднімання, а виходами - виходи блока суматора та блока корекції циклу супроводження. Робота запропонованого фільтра полягає у наступному. На вхід блока віднімання надходять позначки від цілей (виміри координат) xi в кожному і-му циклі супроводження, де i 12,n . , На другий вхід блока надходять екстрапольовані (очікувані) значення координат x ei , які визначаються в блоці екстраполяції за даними попередніх циклів супроводження. В одномірному випадку (по координаті x ) отримуємо: ˆ ˆ x ei xi1 xi1ti ti1 , (1) ˆ ˆ де: xi1, xi1 - оцінки параметрів траєкторії цілі (координати та швидкості) в попередньому (і1)-ому циклі супроводження; t i - момент часу, який відповідає і-му циклу супроводження. В блоці віднімання обчислюються розходження між вимірюваним та екстрапольованим значенням параметру - значення нев'язок Zi : Zi xi xei . (2) Значення нев'язок визначаються поточними помилками вимірювань координат (дисперсією 2 за рахунок невідповідності прийнятої моделі руху цілі ex (зокрема, лінійною) її реальній траєкторії. При маневрі цілі з'являється квадратична складова, яка визначається інтенсивністю (прискоренням) маневру gм : 2 ) та помилками екстраполяції x 25 xi 30 1 gм ti tм 2 , (3) 2 де tм - момент початку маневру. Складова xi визначає регулярну складову помилки обчислення екстрапольованого значення параметру руху цілі. В блоках 3 і 4 здійснюється фільтрація позначок з визначенням поточних оцінок параметрів ˆ траєкторії xi : ˆ xi xei Ki xi xei . (4) Значення коефіцієнту підсилення фільтра Ki розраховуються в блоці 6 з використанням 35 значень елементів кореляційної матриці помилок (КМП) фільтрації i та КМП вимірювань Ri [3]. В матричному вигляді: Ki iHTRi1 , (5) де: H - відома матриця перерахунку. В одномірному випадку: Ki 40 де: 2 e , (6) 2 e 2 e 2 ,2 - відповідно x xe дисперсії вимірювань і екстраполяції. Значення елементів КМП вимірювань Ri визначаються в блоці 7 [3], зокрема: i ei KiHei . При маневрі цілі з'являються регулярні складові помилок екстраполяції x ei , пропорційні xi 45 ˆ (3), відповідна складова значення нев'язки Zi (2) та динамічна помилка фільтрації xi (4). Для урахування та компенсації цих помилок використовується вузол аналізу і корекції 8. В блоці 9 визначається регулярна складова нев'язки Zi , як результат усереднення в експоненціальному фільтрі з коефіцієнтом згладжування A поточних значень нев'язок Zi [4]: Zi 1 A Zi1 AZi . (7) Залежність величини Zi від прискорення маневру цілі gм відповідає співвідношенню [4]: 2 UA 71892 U Zi gм Ti2 , (8) 12 i, A A 2 A i 12 1 21 A i i2 . 5 Значення Zi надходять до блоку 10, де здійснюється аналіз стійкості супроводження цілі на основі отриманих динамічних помилок супроводження. При цьому порівнюється поточне значення Z з можливим відхиленням параметра Z за рахунок помилок вимірювань та екстраполяції: Zi S Z , (9) де: 2 - дисперсія усередненої нев'язки; Z Z 0,3x ; 10 15 20 S - коефіцієнт, який визначає імовірність попадання позначки в строб супроводження S 23. При виконанні умови (9) поточне значення Zi використовується для уточнення елементів КМП вимірювань, КМП екстраполяції та КМП фільтрації (блоки 7, 11). Розмір строба супроводження цілі визначається можливими помилками вимірювань координат (позначок), помилками екстраполяції та необхідною імовірністю потрапляння позначок у строб. В той же час розмір строба обмежується вимогами до селективних властивостей алгоритму супроводження, зокрема, за наявності групової цілі [3]. Для необхідної реакції фільтра на випадковий розкид прискорення цілі g коефіцієнт підсилення фільтра Ki протягом часу супроводження T0 обмежується значенням K 0 [4], зокрема T0 5 144Tc22 . x g Відповідно помилка (дисперсія) екстраполяції за рахунок помилок вимірювань в усталеному режимі супроводження (при ti T0 ) визначається 2 e x 25 K0 2 . x 1 K0 При невиконанні умови (9), зокрема при маневрі цілі, поточне значення Z використовується ˆ для виявлення та оцінки прискорення маневру gм в блоці 13, відповідно з (8). ˆ Отримані оцінки Z та gм використовуються в блоці 14 для корекції поточних екстрапольованих значень координати та швидкості цілі: ˆ xe xei Z ; (10) 30 1 2 ˆ 1 x e x ei gмTi . Відповідно корегуються оцінки параметрів траєкторії цілі. Якщо задана імовірність попадання позначки в строб супроводження не забезпечується, в блоці 19 розраховується менше значення циклу супроводження Tc , при якому ця умова виконується [3]: 35 Tci Tc i1 Z / x . (11) Зміна циклу супроводження цілі можлива для радіолокаційних систем з електронним керуванням параметрами діаграми спрямованості. ˆ На вихід фільтра видаються вектор уточнених оцінок параметрів траєкторії xi та необхідне 40 45 значення циклу (періоду) супроводження Tc , які забезпечують задану імовірність стійкого супроводження цілі. Послідовність включення в роботу окремих блоків фільтра та їх взаємодія визначається сіткою керуючих і синхронізуючих імпульсів, "прив'язаних" до сітки частот синхронізатора PJIC (вузол синхронізації і керування на схемі пристрою не показаний). При технічній реалізації запропонованого фільтра можна використовувати типові вузли і блоки радіоелектронної апаратури, інтегральні схеми і мікропроцесори з відповідним програмним забезпеченням [3]. 3 UA 71892 U 5 Джерела інформації: 1. Фарина А., Студер Ф. Цифровая обработка радиоэлектронной информации. Сопровождение целей. / Пер. с англ. - М.: Радио и связь, 1993. - с. 119. 2. Корестелев А. А. Пространственно-временная теория радиосистем. - М.: Радио и связь, 1987. - с. 251. 3. Кузьмин С. З. Цифровая радиолокация. Введение в теорию. - К.: КВІЦ, 2000. - 428 с. 4. Саврасов Ю. С. Алгоритмы и программы в радиолокации. - М.: Радио и связь, 1985.-216 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 Ймовірнісний фільтр, який містить вузол фільтра Калмана у складі послідовно з'єднаних блока віднімання, блока підсилювача, блока суматора, блока екстраполяції і послідовно з'єднаних блока розрахунку кореляційної матриці помилок (КМП), блока обчислення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол аналізу та корекції у складі послідовно з'єднаних блока усереднення, блока аналізу стійкості супроводження, блока виявлення та оцінки прискорення маневру і блока корекції екстрапольованих значень, та блок корекції КМП і блок корекції циклу супроводження, причому вихід блока екстраполяції з'єднаний з другими входами блока віднімання і блока суматора, вихід блока обчислення коефіцієнта підсилення - з другим входом блока підсилювача, вихід блока віднімання додатково з'єднаний з входом блока усереднення, перший вихід блока аналізу стійкості супроводження додатково з'єднаний зі входом блока корекції циклу супроводження, а другий вихід - із входом блока корекції КМП, вихід якого з'єднано з входом блока розрахунку КМП, вихід блока корекції екстрапольованих значень з'єднано з другим входом блока екстраполяції, при цьому входом пристрою є вхід блока віднімання, а виходами - виходи блока суматора та блока корекції циклу супроводження. 4 UA 71892 U Комп’ютерна верстка M. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюProbability filter
Автори англійськоюChelpanov Volodymyr Valentynovych, Chelpanov Artem Volodymyrovych, Sydorenko Ruslan Hryhorovych, Melenti Yevhen Oleksandrovych, Kolomiitsev Oleksii Volodymyrovych
Назва патенту російськоюВероятностный фильтр
Автори російськоюЧелпанов Владимир Валентинович, Челпанов Артем Владимирович, Сидоренко Руслан Григорьевич, Меленти Евгений Александрович, Коломийцев Алексей Владимирович
МПК / Мітки
МПК: G01S 13/52
Мітки: ймовірнісний, фільтр
Код посилання
<a href="https://ua.patents.su/7-71892-jjmovirnisnijj-filtr.html" target="_blank" rel="follow" title="База патентів України">Ймовірнісний фільтр</a>
Пристрій рекурентної фільтрації параметрів траєкторії цілі
Номер патенту: 50281
Опубліковано: 25.05.2010
Автори: Челпанов Артем Володимирович, Смоляков Денис Олександрович, Піскунов Станіслав Миколайович, Ворошилов Сергій Вікторович
МПК: G01S 13/52
Мітки: рекурентної, фільтрації, пристрій, параметрів, траєкторії, цілі
Формула / Реферат:
Пристрій рекурентної фільтрації параметрів траєкторії цілі, який містить фільтр Калмана у складі послідовно з'єднаних блока фільтрації, блока екстраполяції і визначення кореляційної матриці помилок (КМП) та блока визначення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол визначення характеристик помилок та корекції КМП у складі послідовно з'єднаних блока визначення характеристик корельованих помилок, блока...
Адаптивний фільтр оцінки параметрів траєкторії цілі
Номер патенту: 48843
Опубліковано: 15.08.2002
Автори: Савченко Микола Павлович, Фик Олександр Ілліч, Карлов Володимир Дмитрович, Челпанов Артем Володимирович
МПК: G01S 13/00, G01S 13/52
Мітки: параметрів, адаптивний, цілі, оцінки, фільтр, траєкторії
Формула / Реферат:
Адаптивний фільтр оцінки параметрів траєкторії цілі, що містить блок обчислення кореляційної матриці помилок, послідовно з'єднані блок обчислення оцінок параметрів, пристрій що запам'ятовує та блок екстраполяції параметрів, який відрізняється тим, що додатково введено блок фазометра і вузол оцінки швидкості та прискорення у складі послідовно з'єднаних блоків генератора опорних функцій, блоку вирахування, корелятора і блоку формування оцінок,...
Пристрій супроводження цілей
Номер патенту: 56901
Опубліковано: 25.01.2011
Автори: Челпанов Артем Володимирович, Хмелевська Ольга Олександрівна, Коломійцев Олексій Володимирович, Рибалка Григорій Валерійович, Квіткін Костянтин Петрович
МПК: G01S 13/52
Мітки: пристрій, цілей, супроводження
Формула / Реферат:
Пристрій супроводження цілей, що містить послідовно з'єднані блок відбору позначок у стробах, блок формування нев'язок, блок формування вибірок нев'язок, блок обчислення достовірності варіантів селекції, блок селекції позначок та блок фільтрації і екстраполяції, який відрізняється тим, що додатково введені вузол непараметричного тестування у складі послідовно з'єднаних блока ранжування вибірок нев'язок та блока тестування вибірок, також...
Пристрій для супроводження цілей
Номер патенту: 67301
Опубліковано: 10.02.2012
Автори: Лезік Олександр Віталійович, Тіхонов Іван Митрофанович, Челпанов Артем Володимирович, Піскунов Станіслав Миколайович, Челпанов Володимир Валентинович
МПК: G01S 13/52
Мітки: супроводження, цілей, пристрій
Формула / Реферат:
Пристрій для супроводження цілей, що містить послідовно з'єднані блок визначення координат, блок фільтрації, блок визначення коефіцієнта підсилення, блок екстраполяції, блок формування нев'язок, блок фільтрації нев'язок і блок виявлення та визначення характеристик маневру, який відрізняється тим, що додатково введені вузол когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора і блока формування оцінки...
Пристрій супроводження радіолокаційних цілей
Номер патенту: 62816
Опубліковано: 12.09.2011
Автори: Челпанов Артем Володимирович, Яцуценко Анатолій Якович, Карлов Дмитро Володимирович, Клімішен Олексій Олегович, Пєвцов Геннадій Володимирович
МПК: G01S 13/52
Мітки: радіолокаційних, супроводження, цілей, пристрій
Формула / Реферат:
Пристрій супроводження радіолокаційних цілей, що містить послідовно з'єднані блок формування стробу, блок відбору позначок в стробі, блок визначення відхилень, блок вибору позначок та блок фільтрації і екстраполяції, який відрізняється тим, що додатково після блока визначення відхилень введено вузол непараметричної селекції у складі послідовно з'єднаних блока формування вибірок нев'язок, блока ранжування нев'язок та блока тестування вибірок,...
Попередній патент: Спосіб моделювання стрільби зі стрілецької зброї
Наступний патент: Канал вимірювання кутових швидкостей літальних апаратів з бспм для лівс полігонного випробувального комплексу
Випадковий патент: Зерновий комбайн