Кривошипно-шатунні гідроножиці
Номер патенту: 86017
Опубліковано: 10.12.2013
Автори: Мелашич Сергій Васильович, Січко Ігор Миколайович, Мелашич Василь Васильович

Формула / Реферат
Кривошипно-шатунні гідроножиці, що включають модуль орієнтації, рукоять, на якій шарнірно закріплені дві гідрокеровані щелепи, які відрізняються тим, що гідрокеровані щелепи додатково з'єднані між собою допоміжним колінчастим валом з механізмом його приводу.
Текст
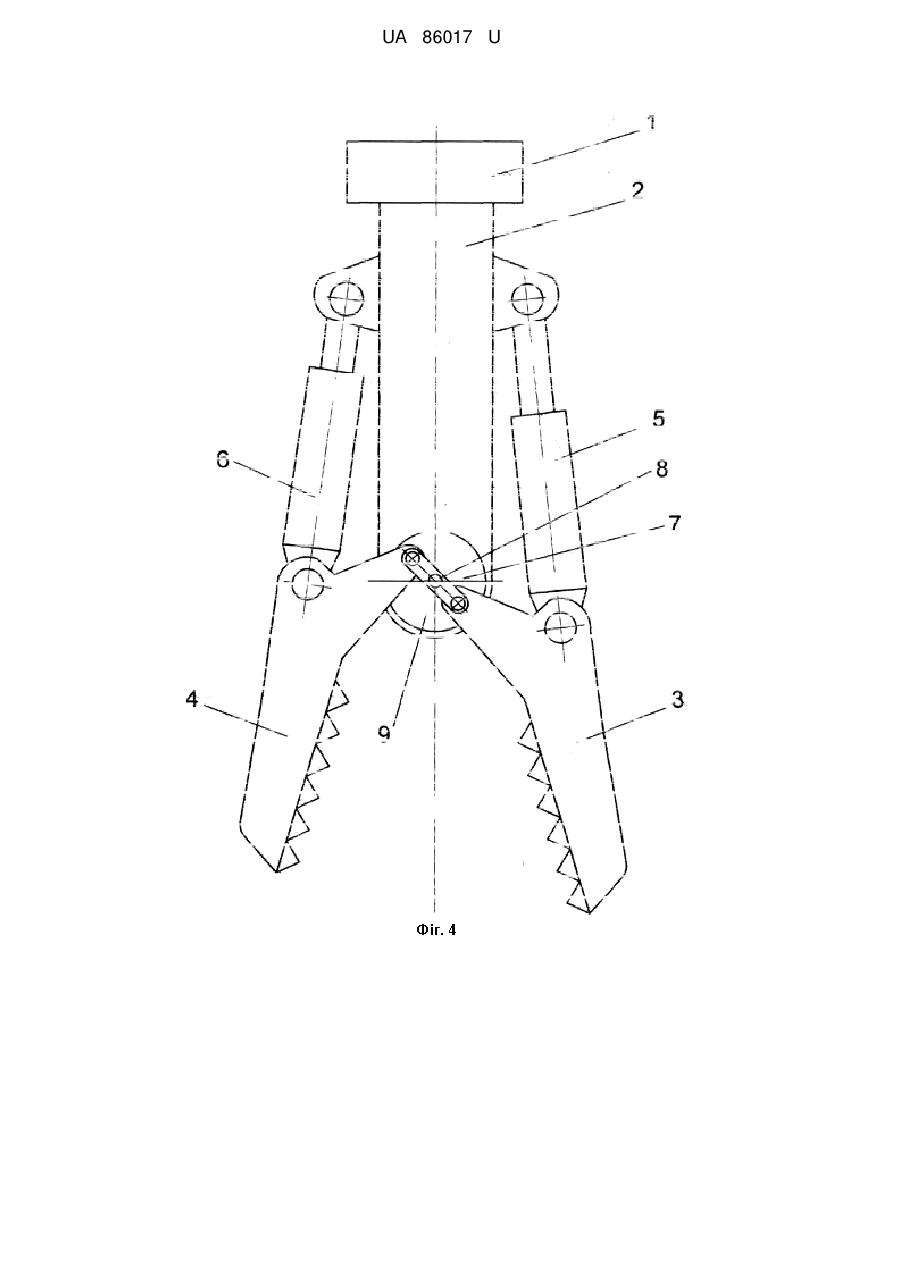
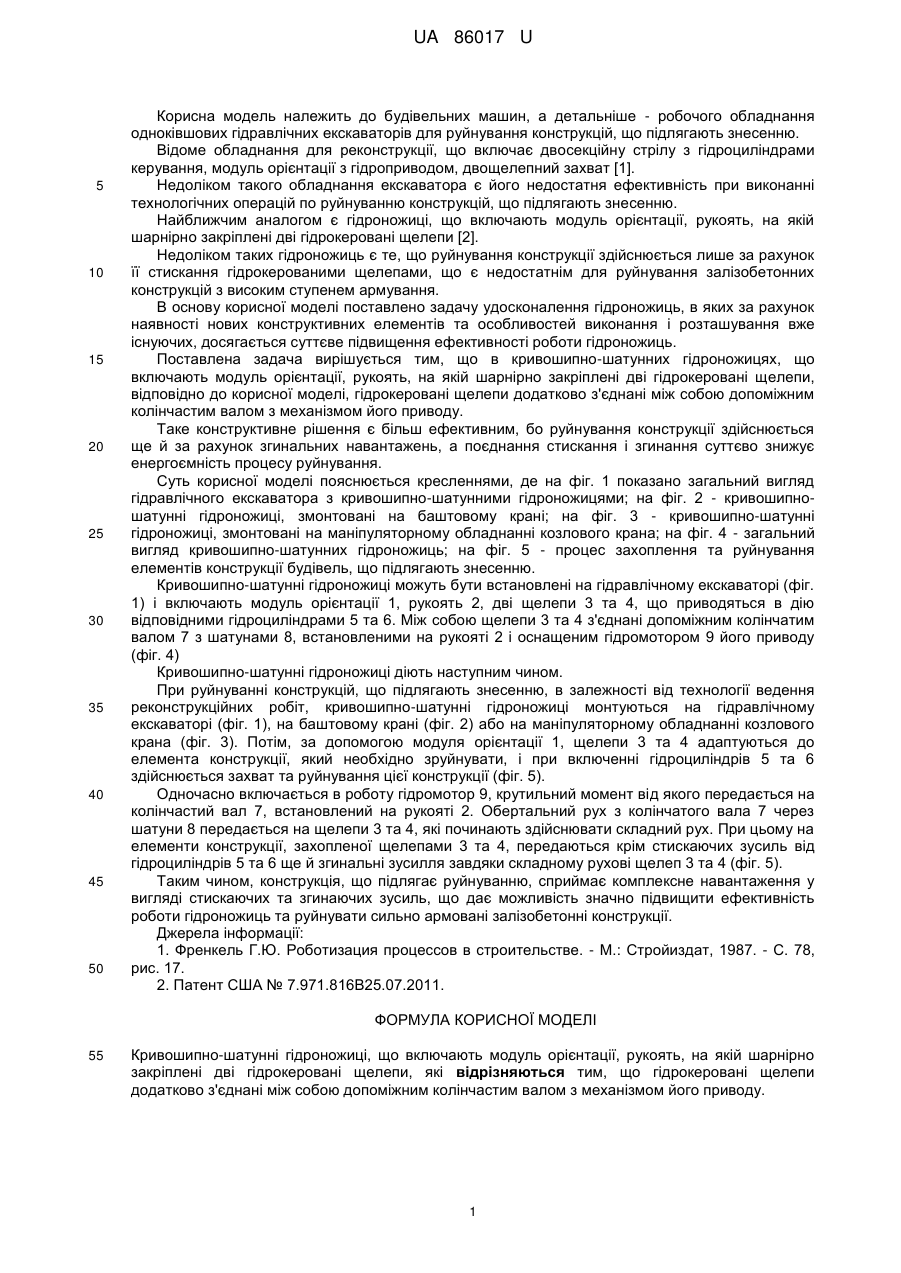
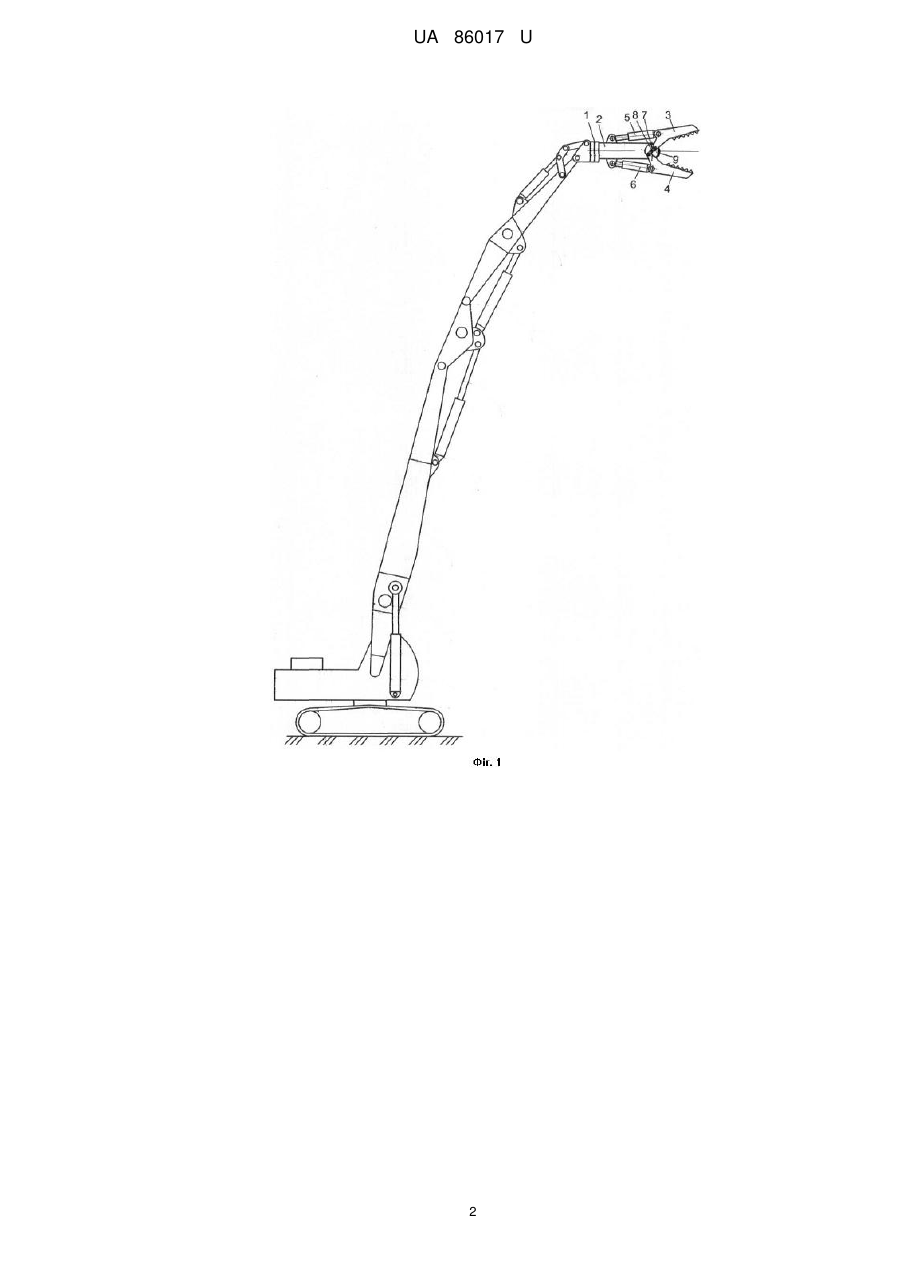
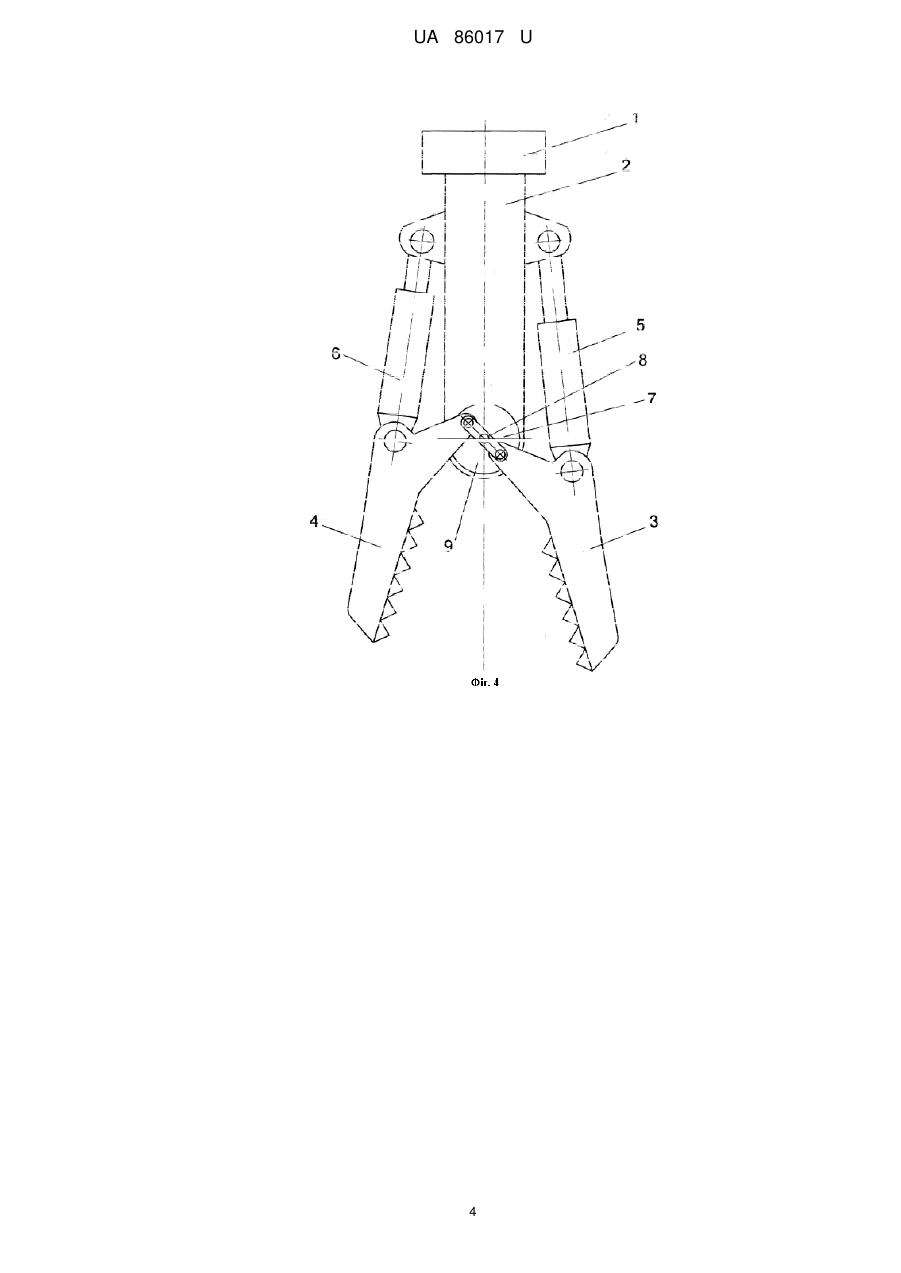
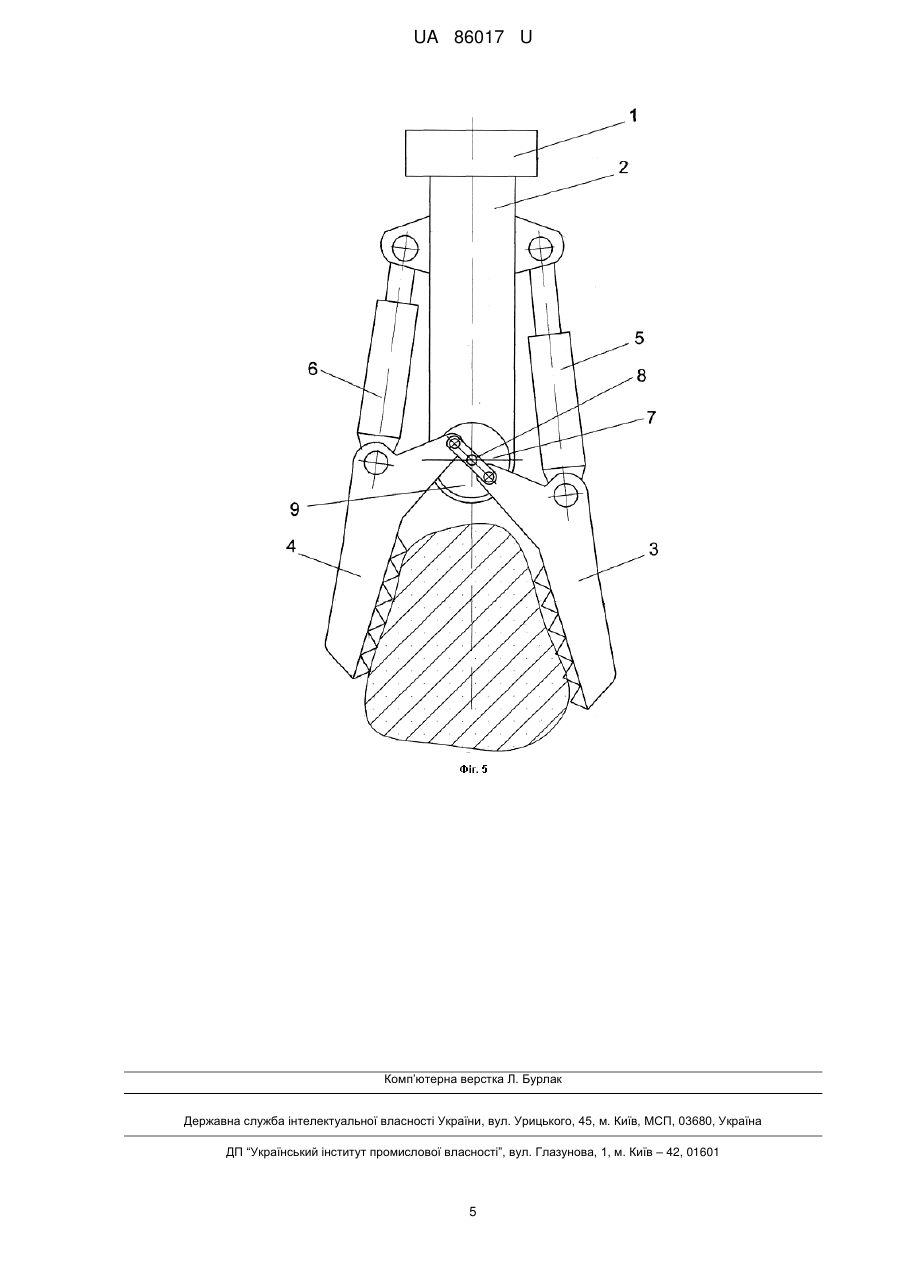
Реферат: UA 86017 U UA 86017 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до будівельних машин, а детальніше - робочого обладнання одноківшових гідравлічних екскаваторів для руйнування конструкцій, що підлягають знесенню. Відоме обладнання для реконструкції, що включає двосекційну стрілу з гідроциліндрами керування, модуль орієнтації з гідроприводом, двощелепний захват [1]. Недоліком такого обладнання екскаватора є його недостатня ефективність при виконанні технологічних операцій по руйнуванню конструкцій, що підлягають знесенню. Найближчим аналогом є гідроножиці, що включають модуль орієнтації, рукоять, на якій шарнірно закріплені дві гідрокеровані щелепи [2]. Недоліком таких гідроножиць є те, що руйнування конструкції здійснюється лише за рахунок її стискання гідрокерованими щелепами, що є недостатнім для руйнування залізобетонних конструкцій з високим ступенем армування. В основу корисної моделі поставлено задачу удосконалення гідроножиць, в яких за рахунок наявності нових конструктивних елементів та особливостей виконання і розташування вже існуючих, досягається суттєве підвищення ефективності роботи гідроножиць. Поставлена задача вирішується тим, що в кривошипно-шатунних гідроножицях, що включають модуль орієнтації, рукоять, на якій шарнірно закріплені дві гідрокеровані щелепи, відповідно до корисної моделі, гідрокеровані щелепи додатково з'єднані між собою допоміжним колінчастим валом з механізмом його приводу. Таке конструктивне рішення є більш ефективним, бо руйнування конструкції здійснюється ще й за рахунок згинальних навантажень, а поєднання стискання і згинання суттєво знижує енергоємність процесу руйнування. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 показано загальний вигляд гідравлічного екскаватора з кривошипно-шатунними гідроножицями; на фіг. 2 - кривошипношатунні гідроножиці, змонтовані на баштовому крані; на фіг. 3 - кривошипно-шатунні гідроножиці, змонтовані на маніпуляторному обладнанні козлового крана; на фіг. 4 - загальний вигляд кривошипно-шатунних гідроножиць; на фіг. 5 - процес захоплення та руйнування елементів конструкції будівель, що підлягають знесенню. Кривошипно-шатунні гідроножиці можуть бути встановлені на гідравлічному екскаваторі (фіг. 1) і включають модуль орієнтації 1, рукоять 2, дві щелепи 3 та 4, що приводяться в дію відповідними гідроциліндрами 5 та 6. Між собою щелепи 3 та 4 з'єднані допоміжним колінчатим валом 7 з шатунами 8, встановленими на рукояті 2 і оснащеним гідромотором 9 його приводу (фіг. 4) Кривошипно-шатунні гідроножиці діють наступним чином. При руйнуванні конструкцій, що підлягають знесенню, в залежності від технології ведення реконструкційних робіт, кривошипно-шатунні гідроножиці монтуються на гідравлічному екскаваторі (фіг. 1), на баштовому крані (фіг. 2) або на маніпуляторному обладнанні козлового крана (фіг. 3). Потім, за допомогою модуля орієнтації 1, щелепи 3 та 4 адаптуються до елемента конструкції, який необхідно зруйнувати, і при включенні гідроциліндрів 5 та 6 здійснюється захват та руйнування цієї конструкції (фіг. 5). Одночасно включається в роботу гідромотор 9, крутильний момент від якого передається на колінчастий вал 7, встановлений на рукояті 2. Обертальний рух з колінчатого вала 7 через шатуни 8 передається на щелепи 3 та 4, які починають здійснювати складний рух. При цьому на елементи конструкції, захопленої щелепами 3 та 4, передаються крім стискаючих зусиль від гідроциліндрів 5 та 6 ще й згинальні зусилля завдяки складному рухові щелеп 3 та 4 (фіг. 5). Таким чином, конструкція, що підлягає руйнуванню, сприймає комплексне навантаження у вигляді стискаючих та згинаючих зусиль, що дає можливість значно підвищити ефективність роботи гідроножиць та руйнувати сильно армовані залізобетонні конструкції. Джерела інформації: 1. Френкель Г.Ю. Роботизация процессов в строительстве. - М.: Стройиздат, 1987. - С. 78, рис. 17. 2. Патент США № 7.971.816В25.07.2011. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 Кривошипно-шатунні гідроножиці, що включають модуль орієнтації, рукоять, на якій шарнірно закріплені дві гідрокеровані щелепи, які відрізняються тим, що гідрокеровані щелепи додатково з'єднані між собою допоміжним колінчастим валом з механізмом його приводу. 1 UA 86017 U 2 UA 86017 U 3 UA 86017 U 4 UA 86017 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюMelashych Vasyl Vasyliovych, Melashych Serhii Vasyliovych, Sichko Ihor Mykolaiovych
Автори російськоюМелашич Василий Васильевич, Мелашич Сергей Васильевич, Сичко Игорь Николаевич
МПК / Мітки
МПК: E02F 3/00
Мітки: гідроножиці, кривошипно-шатунні
Код посилання
<a href="https://ua.patents.su/7-86017-krivoshipno-shatunni-gidronozhici.html" target="_blank" rel="follow" title="База патентів України">Кривошипно-шатунні гідроножиці</a>
Гідроножиці гідроімпульсної дії

Номер патенту: 84505
Опубліковано: 25.10.2013
Автори: Мелашич Василь Васильович, Січко Ігор Миколайович, Бєліков Анатолій Серафимович
МПК: E02F 3/28
Мітки: гідроімпульсної, гідроножиці, дії
Формула / Реферат:
Гідроножиці гідроімпульсної дії, що містять модуль орієнтації, рукоять, до якої шарнірно прикріплені дві гідрокеровані щелепи, які відрізняються тим, що гідрокеровані щелепи змонтовані на допоміжних важелях, які шарнірно прикріплені до рукояті та з'єднані між собою додатковим гідроциліндром з механізмом гідропульсації.
Складні гідроножиці

Номер патенту: 85782
Опубліковано: 25.11.2013
Автори: Душко Віталій Валерійович, Мелашич Василь Васильович, Мелашич Сергій Васильович
МПК: E02F 3/28
Мітки: складні, гідроножиці
Формула / Реферат:
Складні гідроножиці, що містять модуль орієнтації, рукоять з двома шарнірами, до яких прикріплені дві гідрокеровані щелепи, які відрізняються тим, що до гідрокерованих щелеп в нижній частині шарнірно прикріплені додаткові щелепи, гідроциліндри управління якими встановлені співвісно з шарнірами рукояті і сполучені з встановленим на рукояті гідропульсатором.
Гідроножиці для руйнування залізобетону

Номер патенту: 84684
Опубліковано: 25.10.2013
Автори: Душко Віталій Валерійович, Мелашич Василь Васильович, Мелашич Сергій Васильович
МПК: E02F 3/28
Мітки: гідроножиці, залізобетону, руйнування
Формула / Реферат:
Гідроножиці для руйнування залізобетону, що включають модуль орієнтації, рукоять, дві щелепи з гідроциліндрами їх керування, які відрізняються тим, що гідроциліндри оснащені штоками, у внутрішній порожнині яких змонтовані додаткові гідроциліндри, укомплектовані гідропульсаторами.
Гідроножиці подрібнювальні
Номер патенту: 84504
Опубліковано: 25.10.2013
Автори: Січко Ігор Миколайович, Бєліков Анатолій Серафимович, Мелашич Василь Васильович
МПК: E02F 3/28
Мітки: гідроножиці, подрібнювальні
Формула / Реферат:
Гідроножиці подрібнювальні, що містять модуль орієнтації, рукоять, до якої шарнірно прикріплені дві щелепи та гідроциліндри їх керування, які відрізняється тим, що щелепи та гідроциліндри їх керування змонтовані на допоміжних важелях, шарнірно прикріплених до рукояті, і між собою важелі з'єднані розпірними плитами, що приводяться в дію кривошипно-шатунним механізмом та гвинтовою пружиною.
Гідроножиці для руйнування бетону

Номер патенту: 84686
Опубліковано: 25.10.2013
Автори: Мелашич Василь Васильович, Душко Віталій Валерійович, Мелашич Сергій Васильович
МПК: E02F 3/28
Мітки: гідроножиці, руйнування, бетону
Формула / Реферат:
Гідроножиці для руйнування бетону, що включають модуль орієнтації, рукоять з шарніром кріплення до неї двох гідрокерованих щелеп, які відрізняються тим, що рукоять оснащена додатковою телескопічною вставкою з гідроциліндром її керування, на якій знаходиться шарнір кріплення щелеп.
Попередній патент: Датчик кута нахилу
Наступний патент: Гідроножиці гідроімпульсної дії
Випадковий патент: Спосіб отримання відновленого заліза