Електрогідравлічний захват для лісу
Номер патенту: 96266
Опубліковано: 26.01.2015
Автори: Снігир Володимир Сергійович, Гарболінський Віктор Миколайович, Рябошапка Сергій Олександрович, Шаповалов Сергій Федорович

Формула / Реферат
Електрогідравлічний захват для лісу, що складається з рами, на якій встановлені щелепи з кликами, гідравлічного приводу щелеп, що включає два з'єднані з кожною із щелеп гідроциліндри, гідророзподільник, гідронасос, систему трубопроводів з запобіжним клапаном і фільтром, який відрізняється тим, що містить поворотну головку, яка складається електродвигуна з редуктором, кабелеукладача, шестірні та приводного вала з блоками, а рама захвата обладнана Т-подібним хвостовиком, на який встановлюється поворотна головка, що з'єднується з краном за допомогою канатів, пропущених через блоки, або підвіска, яка навішується безпосередньо на гак крана.
Текст
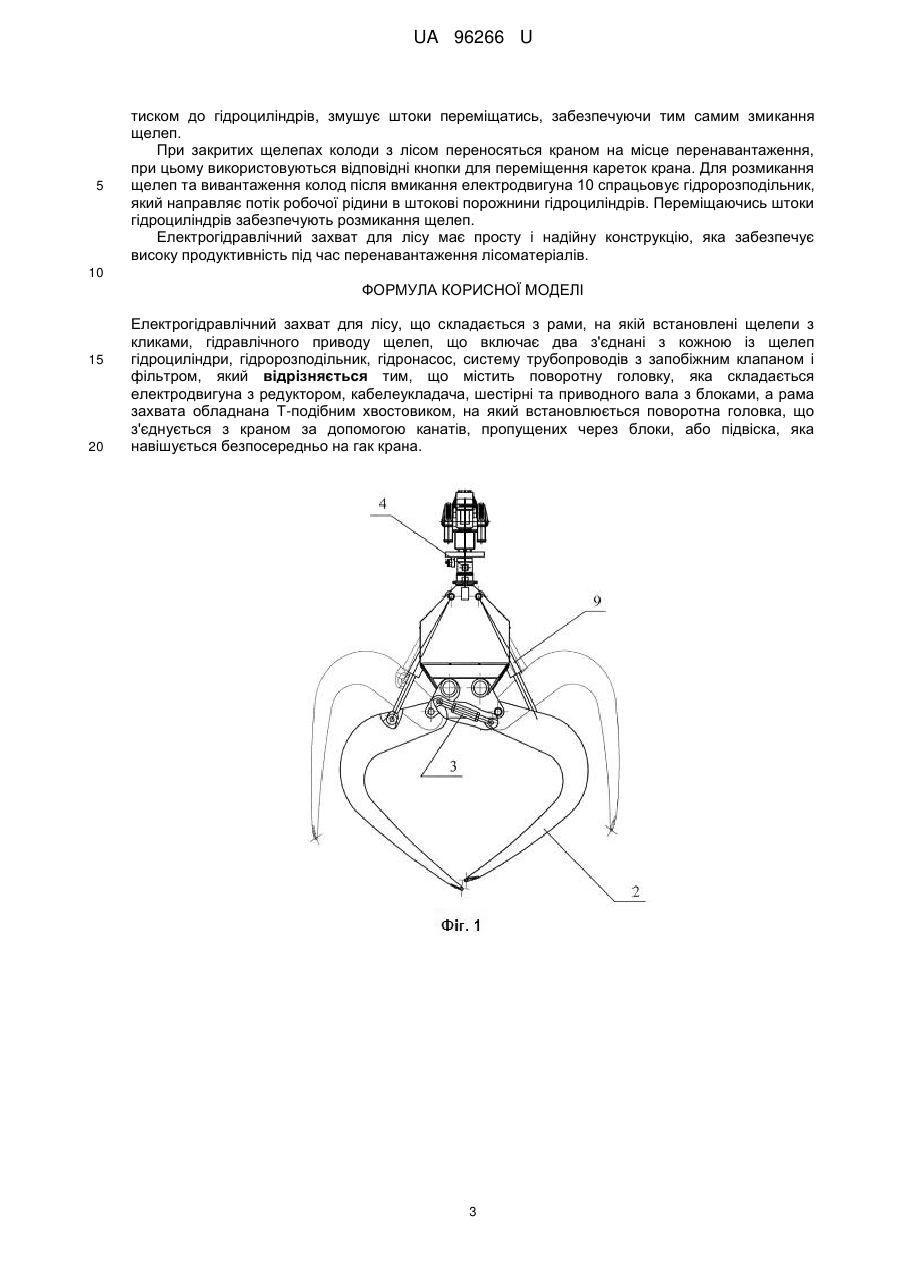
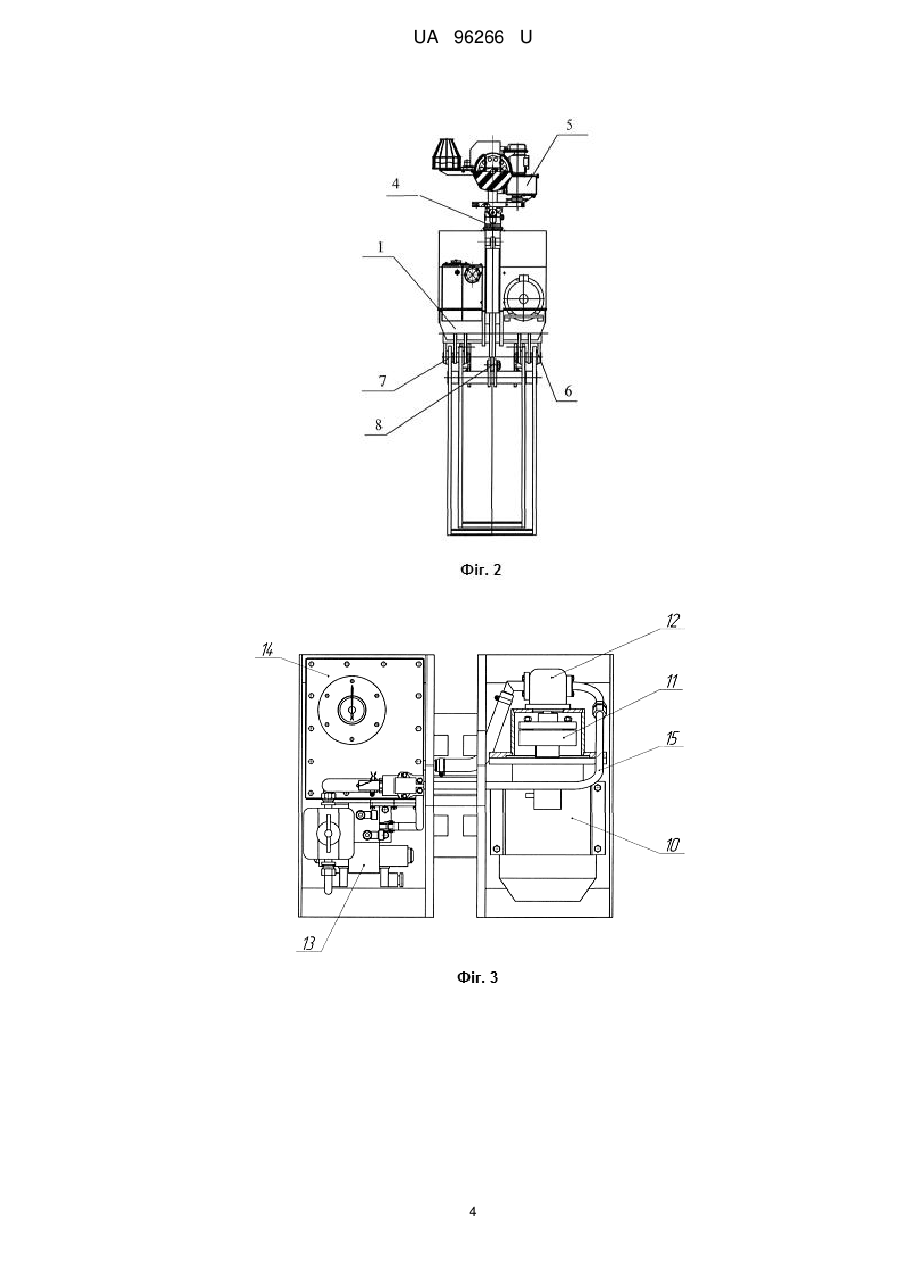
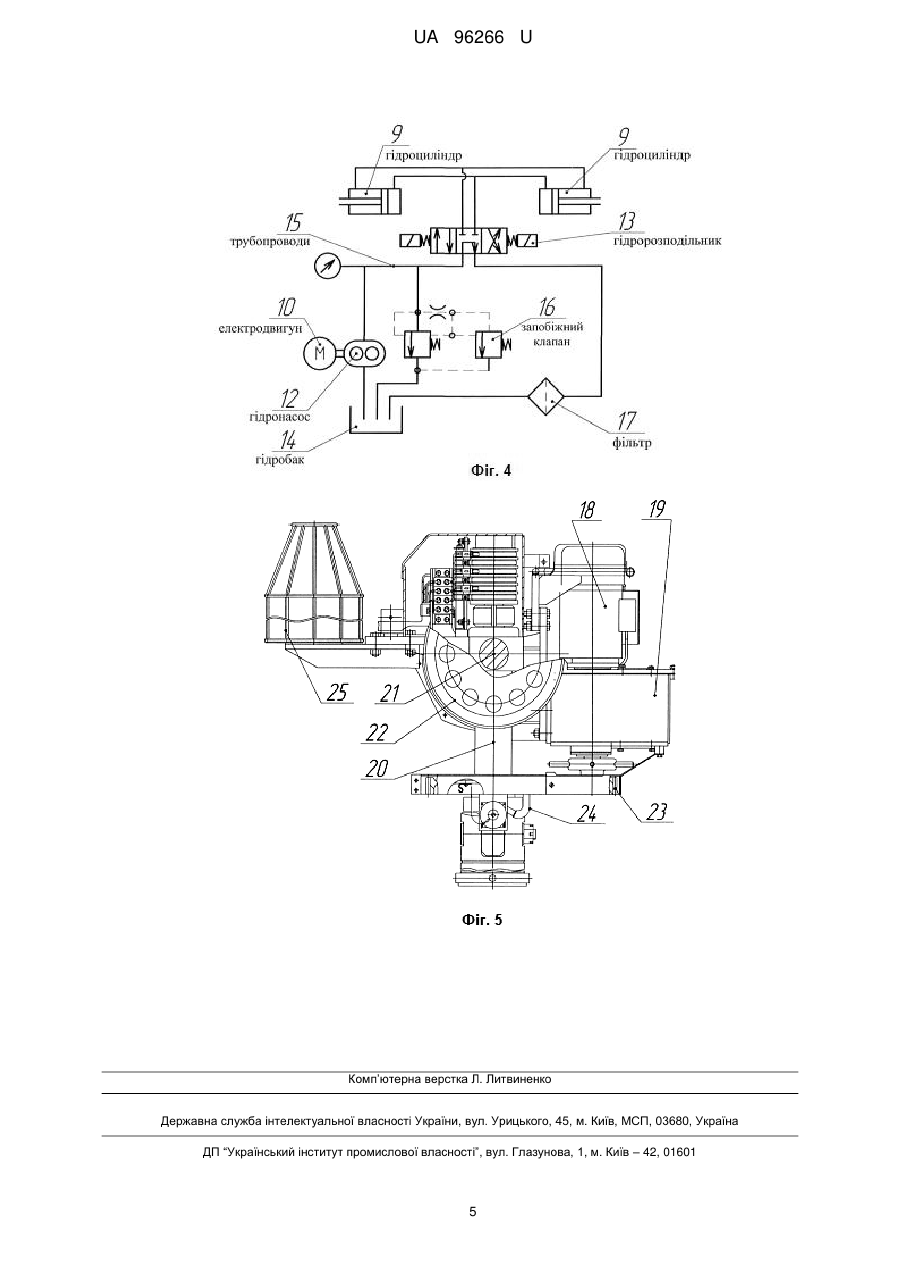
Реферат: Електрогідравлічний захват для лісу складається з рами, на якій встановлені щелепи з кликами, гідравлічного приводу щелеп, що включає два з'єднані з кожною із щелеп гідроциліндри, гідророзподільник, гідронасос, систему трубопроводів з запобіжним клапаном і фільтром. Він містить поворотну головку, яка складається електродвигуна з редуктором, кабелеукладача, шестірні та приводного вала з блоками, а рама захвата обладнана Т-подібним хвостовиком, на який встановлюється поворотна головка, що з'єднується з краном за допомогою канатів, пропущених через блоки, або підвіска, яка навішується безпосередньо на гак крана. UA 96266 U (54) ЕЛЕКТРОГІДРАВЛІЧНИЙ ЗАХВАТ ДЛЯ ЛІСУ UA 96266 U UA 96266 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вантажозахватних пристроїв, що встановлюються на вантажопідіймальні крани. Електрогідравлічний захват для лісу (далі - захват) призначений для навантаження, розвантаження та переміщення окремих колод лісу (чи їх пакетів) довжиною до 6,5 м у залізничні піввагони, вагони-лісовози і платформи. Захват встановлюються на козлові та мостові крани, автокрани, крани на залізничному ходу, навантажувачі і може використовуватися на підприємствах лісної та деревообробної промисловості, в будівництві та інших галузях промисловості для перевантаження круглих лісоматеріалів. Відомі конструкції щелепних захватів для круглих лісоматеріалів та грейферних механізмів, які використовуються для перевантаження лісу і включають корпус з шарнірно закріпленими двома щелепами, механізм повороту навколо вертикальної осі і гідропривід, який містить з'єднані з щелепами гідроциліндри, гідронасос з електродвигуном і систему управління гідроциліндрами, яка включає трубопроводи, клапани, фільтри. Серед аналогів захват для круглих лісоматеріалів (патент RU № 2076838), який містить дві щелепи, одна з яких - та, що зачерпує, з'єднана з механізмом повороту корпусу навколо вертикальної осі, що змонтований у корпусі захвата, а друга виконана у вигляді притискного важеля шарнірно закріпленого на щелепі, що зачерпує, і приводиться у рух гідроциліндром. Недоліком цього захвату для круглих лісоматеріалів є складність конструкції через наявність двох гідроприводів, обмежений кут повороту, а також обмежені експлуатаційні можливості, так як захват може використовуватися лише для перевантаження лісоматеріалів, розташованих на відкритих площадках. Відомий також гідравлічний грейферний механізм (далі - механізм), що має аналогічне призначення (патент RU № 2301191 "Гидравлический грейфер"), який містить раму, на якій встановлені щелепи з кликами, підвіску, привод щелеп, що включає два гідроциліндри, і механізм повороту навколо вертикальної осі, який включає вал-шестірню і гідроциліндр приводу, що жорстко закріплений на рамі, при цьому вал-шестірня механізму повороту взаємодіє з зубчастим сектором, який шарнірно закріплений на штоці гідроциліндра приводу. Недоліком такого механізму є складність конструкції та низька продуктивність. Складність конструкції обумовлена застосуванням двох керуючих гідроприводів, які включають гідроциліндри привода щелеп та гідроциліндр механізму повороту. Низька продуктивність пояснюється тим, що у даному випадку з'єднання вказаного механізму з краном здійснюється шляхом навішування підвіски безпосередньо на гак крана. При такому з'єднанні гак крана вільно обертається навколо вертикальної осі, в результаті чого і механізм з вантажем (особливо при поривах вітру) має можливість довільно обертатися навколо вертикальної осі. Це ускладнює процес установки та орієнтації щелеп відносно вантажу, іноді виникає необхідність у виконанні додаткових (в тому числі і ручних) робіт для забезпечення більш точної установки щелеп, що призводить до втрат часу на виконання робіт з перевантаження лісоматеріалів. Ненадійність цієї конструкції полягає в тому, що під час довільного обертання механізму навколо вертикальної осі не виключені випадки закручування (заплітання) силових кабелів навколо тросів, що призводить до виникнення аварійний ситуацій; для забезпечення стабільної роботи механізму повороту з гідроприводом необхідно застосування різних видів робочої рідини в зимовий та літній періоди; зубчаста передача, що застосована в механізмі повороту та в механізмі синхронізації щелеп, потребує надійного захисту від потрапляння між зубами сторонніх предметів. В основу корисної моделі поставлена задача створення електрогідравлічного захвату для лісу підвищеної надійності та продуктивності, спрощеної конструкції з розширенням можливостей його застосування. Поставлена задача вирішується тим, що електрогідравлічний захват для лісу, що складається з рами, на якій встановлені щелепи з кликами, гідравлічного приводу щелеп, що включає два з'єднані з кожною із щелеп гідроциліндри, гідронасос, гідророзподільник, систему трубопроводів з запобіжним клапаном, манометром і фільтром, містить поворотну головку, яка складається з електродвигуна з редуктором, кабелеукладача, шестірні та приводного вала з блоками, а рама захвата обладнана Т-подібним хвостовиком з можливістю встановлення на захваті поворотної головки, яка з'єднується з краном за допомогою канатів, пропущених через блоки, або підвіски, яка навішується безпосередньо на гак крана. Запропонована конструкція за рахунок застосування поворотної головки з електроприводом забезпечує вільне обертання захвата навколо вертикальної осі з можливістю його фіксації в заданому положенні, що дозволяє швидко орієнтувати щелепи відносно лісоматеріалів, що перевантажуються, в результаті чого скорочується час на виконання вантажно 1 UA 96266 U 5 10 15 20 25 30 35 40 45 50 55 60 розвантажувальних робіт та підвищується продуктивність захвата. Застосування лише одного гідравлічного приводу спрощує конструкцію захвата та підвищує його надійність, наявність кабелеукладача забезпечує надійний захист кабелів живлення та керування від пошкоджень. Обладнання рами захвата Т-подібним хвостовиком дає можливість з'єднувати захват з краном або за допомогою підвіски, яка безпосередньо встановлюється на гак крана, або за допомогою поворотної головки, яка з'єднується з краном за допомогою канатів, пропущених через блоки приводного вала головки. Це дозволяє використовувати захват на кранах різних типів як із застосуванням поворотної головки так і без неї, та встановлювати його на будь-яких інших вантажопідіймальних машинах (наприклад автокранах та навантажувачах, обладнаних стрілою). Таким чином досягається бажаний технічний результат, який дає також економічний ефект. Конструкція захвату представлена на кресленні, де: фіг. 1 - загальний вигляд захвата, фіг. 2 - вигляд збоку; фіг. 3 - гідрообладнання; фіг. 4 - схема гідравлічна; фіг. 5 - поворотна головка. Захват (фіг. 1 та фіг. 2) складається з рами 1, на якій шарнірно закріплені щелепи 2 та розташовано обладнання гідроприводу, штанг 3, шарніра 4, поворотної головки 5. Металоконструкція рами 1 складається з зварених між собою деталей, виготовлених з листового прокату. У верхній частині до рами приварений Т-подібний хвостовик, в який встановлено шарнір 4, за допомогою якого захват з'єднується з поворотною головкою 5. В нижній частині рами розташовані щелепи 2. Кожна із щелеп містить два клики серповидної форми, які виготовлені з листового металу методом зварювання та з'єднані між собою перемичками. Щелепи шарнірно кріпляться до рами за допомогою осей 6, 7, 8 та з'єднані між собою з обох сторін штангами 3, що забезпечує синхронну роботу щелеп під час їх змикання та розмикання. В центральній частині рами змонтовано обладнання гідроприводу. Гідропривод (фіг. 3), принципова схема якого представлена на фіг. 4, складається з двох гідроциліндрів 9, електродвигуна 10, муфти 11, гідронасоса 12, гідророзподільника 13, гідробака 14, трубопроводів 15, запобіжного клапана 16 та фільтра 17. Запобіжний клапан 16 служить для обмеження тиску в гідросистемі і спрацьовує у випадку, коли тиск в гідросистемі перевищує нормований. Фільтр 17 призначений для очищення робочої рідини під час її зливу з гідроциліндрів в гідробак. Поворотна головка (фіг. 5) складається з електродвигуна 18, редуктора 19, вала 20 з цапфою 21, з обох сторін якої встановлені блоки 22, через які пропускається канат, шестірні 23. Підключення поворотної головки до пульта керування захватом, який знаходиться в кабіні крана, здійснюється за допомогою силового кабелю 24. Для запобігання пошкодження силового кабелю під час роботи захвата передбачено кабелеукладач 25. Захват працює таким чином. Захват з під'єднаною підвіскою або поворотною головкою встановлюється на кран та за допомогою силового кабелю 24 підключається до пульта керування, що знаходиться в кабіні крана. Керування роботою захвата здійснюється кранівником з кабіни крана за допомогою кнопкових пультів, один з яких призначений для вмикання електродвигуна та гідророзподільника, завдяки чому переміщаються штоки гідроциліндрів, забезпечуючи змикання та розмикання щелеп, другий - для вмикання електродвигуна керування поворотною головкою. Піднімання, опускання та переміщення захвата до місця роботи здійснюється стаціонарним пультом керування крана. Для завантаження колод лісу у піввагон (або при їх вивантаженні з піввагону) кранівник, який керує роботою захвата з кабіни крана, натисканням відповідних кнопок на пульті керування краном, переміщає захват до місця роботи та встановлює його безпосередньо над піввагоном або штабелем лісоматеріалів, що перевантажується, щелепи захвата при цьому розкриті. Натисканням відповідної кнопки на пульті керування поворотною головкою, кранівник вмикає електродвигун 18 поворотної головки, який через та редуктор 19 приводить в рух вал 20, завдяки чому стає можливим поворот захвата навколо вертикальної осі для вибору більш точного положення щелеп. Після цього кранівник виключає поворотну головку та натисканням іншої кнопки вмикає електродвигун 10, який через муфту 11 приводить в рух гідронасос 12 та 2 запускає в роботу гідросистему, в якій утворюється робочий тиск 12 мПа (120 кг/см ). Робоча рідина, що знаходиться в гідросистемі, від гідронасоса 12 по трубопроводах 15 через гідророзподільник 13 надходить в поршневі порожнини гідроциліндрів 9. Рідина, що попадає під 2 UA 96266 U 5 тиском до гідроциліндрів, змушує штоки переміщатись, забезпечуючи тим самим змикання щелеп. При закритих щелепах колоди з лісом переносяться краном на місце перенавантаження, при цьому використовуються відповідні кнопки для переміщення кареток крана. Для розмикання щелеп та вивантаження колод після вмикання електродвигуна 10 спрацьовує гідророзподільник, який направляє потік робочої рідини в штокові порожнини гідроциліндрів. Переміщаючись штоки гідроциліндрів забезпечують розмикання щелеп. Електрогідравлічний захват для лісу має просту і надійну конструкцію, яка забезпечує високу продуктивність під час перенавантаження лісоматеріалів. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Електрогідравлічний захват для лісу, що складається з рами, на якій встановлені щелепи з кликами, гідравлічного приводу щелеп, що включає два з'єднані з кожною із щелеп гідроциліндри, гідророзподільник, гідронасос, систему трубопроводів з запобіжним клапаном і фільтром, який відрізняється тим, що містить поворотну головку, яка складається електродвигуна з редуктором, кабелеукладача, шестірні та приводного вала з блоками, а рама захвата обладнана Т-подібним хвостовиком, на який встановлюється поворотна головка, що з'єднується з краном за допомогою канатів, пропущених через блоки, або підвіска, яка навішується безпосередньо на гак крана. 3 UA 96266 U 4 UA 96266 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B66C 3/16
Мітки: електрогідравлічний, захват, лісу
Код посилання
<a href="https://ua.patents.su/7-96266-elektrogidravlichnijj-zakhvat-dlya-lisu.html" target="_blank" rel="follow" title="База патентів України">Електрогідравлічний захват для лісу</a>
Захват для круглих лісоматеріалів
Номер патенту: 83443
Опубліковано: 10.09.2013
Автори: Шаповалов Сергій Федорович, Рябошапка Сергій Олександрович, Гарболінський Віктор Миколайович, Снігир Володимир Сергійович
МПК: B66C 3/16
Мітки: захват, круглих, лісоматеріалів
Формула / Реферат:
Захват для круглих лісоматеріалів, що включає щелепи, траверсу, тяги та приводний механізм, який відрізняється тим, що містить з'єднану із щелепами за допомогою тяг нерухому раму, на якій встановлено електропривод, та рухому траверсу, що зв'язана з електроприводом та з'єднана зі щелепами, змикання та розмикання яких забезпечується переміщенням траверси по двох жорстко закріплених паралельних напрямних, що з'єднують траверсу з нерухомою...
Щелепний захват лісонавантажувача
Номер патенту: 71602
Опубліковано: 15.12.2004
Автори: Швідлер Олександр Петрович, Хом'як Роман Ілліч, Ільницький Богдан Ярославович
МПК: B66C 3/00
Мітки: лісонавантажувача, захват, щелепний
Формула / Реферат:
Щелепний захват лісонавантажувача, що містить корпус з шарнірно приєднаними щелепами з поперечинами між боковинами вужчої і ширшої щелеп в нижньому їх кінці, силовий циліндр, важелі, який відрізняється тим, що щелепи обладнані також поперечинами в верхньому кінці боковин, гільза і шток силового циліндра шарнірно приєднані до важелів щелеп, причому вужча щелепа підпружинена відносно корпусу в напрямі змикання захвата, а силовий циліндр...
Захват для дрібноштучних пакетів
Номер патенту: 40197
Опубліковано: 16.07.2001
Автор: Коломієць Володимир Михайлович
МПК: B66C 1/22
Мітки: дрібноштучних, пакетів, захват
Формула / Реферат:
Захват для дрібноштучних пакетів, який містить раму з закріпленими на ній огороджувальною стінкою, вантажозахватні петлі, підхватні штирі, який відрізняється тим, що до рами шарнірно приєднані висувні пальці, на які підвішується запобіжний кошик з різними за висотою стінками, при цьому огороджувальна стінка захвата забезпечена П-образними виступами.
Кліщовий захват для транспортування вантажів, переважно злитків і виковків циліндричної форми
Номер патенту: 61541
Опубліковано: 25.07.2011
Автори: Кашанський Дмитро Анатолійович, Ісакова Анна Миколаївна, Ратій Сергій Григорийович
МПК: B66C 1/58
Мітки: циліндричної, виковків, транспортування, вантажів, переважно, злитків, захват, форми, кліщовий
Формула / Реферат:
Кліщовий захват для транспортування вантажів, переважно злитків і виковків циліндричної форми, що містить траверсу з підхоплювачами і щонайменше одну пару кліщовин у вигляді двоплечих важелів, шарнірно з'єднаних між собою в центральній частині і кінематично зв'язаних з траверсою за допомогою тяг, який відрізняється тим, що він оснащений жорстко закріпленою планкою і шарнірно встановленим скидачем, а також взаємодіючим з ним штовхачем,...
Вилочний захват для навантажувача
Номер патенту: 5421
Опубліковано: 28.12.1994
Автори: Зінько Роман Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/12
Мітки: навантажувача, вилочний, захват
Формула / Реферат:
(57) Вилочный захват для погрузчика, содержащий каретку, монтируемую на грузоподьмнике погрузчика и несущую вилы, смонтированныес возможностью синхронного вращения их зубьев навстречу друг другу зубчато-реечным механизмом, образованным шестернями, жестко закрепленными на осях вращения указан ных зубьев вил и зацепленных с зубчатыми рейками, выполненными на противолежащих сторонах, установленной с возможностью поперечного...
Попередній патент: Пристрій для поверхневої обробки робочого валка при гарячій прокатці
Наступний патент: Електротранспортний засіб
Випадковий патент: Пристрій для індикації номера викликаючого абонента на телефонному апараті абонента, що виключається