Мобільний робот для механічного очищення корпусу судна
Номер патенту: 100341
Опубліковано: 27.07.2015
Автори: Герасін Олександр Сергійович, Кушнір Володимир Олександрович, Кондратенко Юрій Пантелійович, Топалов Андрій Миколайович
Формула / Реферат
1. Мобільний робот для механічного очищення корпусу судна, що містить основні постійні магніти для утримання робота на феромагнітній поверхні корпусу судна та двокомпонентну раму плоскої конструкції, на якій прямокутна частина рами оснащена гусеничним механізмом переміщення, а кожна гусениця переміщення (ліва і права) оснащена натяжним пристроєм гусеничної стрічки, спареним електродвигуном-редуктором та ведучим і веденим колесами, крім того на прямокутній частині рами встановлена ємність нульової плавучості, трикутна частина загальної рами оснащена механізмом для механічного очищення корпусу судна, що складається з робочого інструменту у вигляді сталевих фрез із зачисними сталевими щітками, системи конічних зубчатих коліс та додаткового електродвигуна з двостороннім редуктором, фрези рівномірно розташовані по обидві сторони трикутної частини загальної рами та кінематично з'єднані за допомогою системи конічних зубчатих коліс з додатковим електродвигуном з двостороннім редуктором, крім того, на нижній поверхні трикутної частини рами встановлені додаткові постійні магніти для додаткового утримування робота на корпусі судна в процесі його очищення, а вали редукторів і електродвигунів для забезпечення водонепроникності оснащені композитними феромагнітними і сальниковими ущільненнями, який відрізняється тим, що основні постійні магніти для утримання робота на феромагнітній поверхні корпусу судна встановлені за допомогою сферичних шарнірів на нижній поверхні прямокутної частини рами між лівою і правою гусеницями з забезпеченням відповідного зазору щодо феромагнітної поверхні корпусу судна.
2. Мобільний робот для механічного очищення корпусу судна за п. 1, який відрізняється тим, що додатково містить підтримуючі котки та встановлені на амортизаторах опорні котки, які контактують з відповідними внутрішніми поверхнями стрічок гусениць переміщення та закріплені з можливістю обертання на нерухомих осях, що жорстко з'єднані з прямокутною частиною рами.
Текст
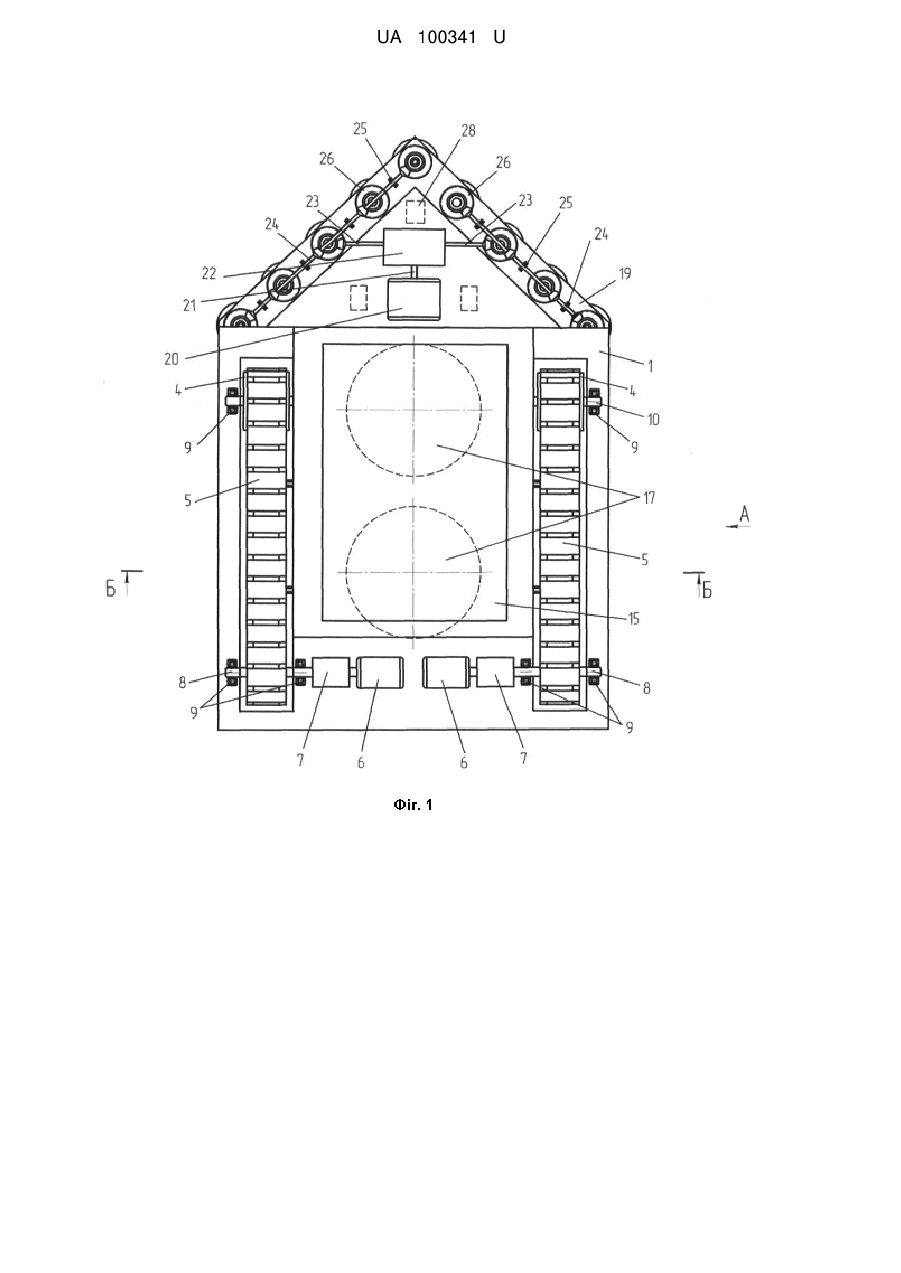
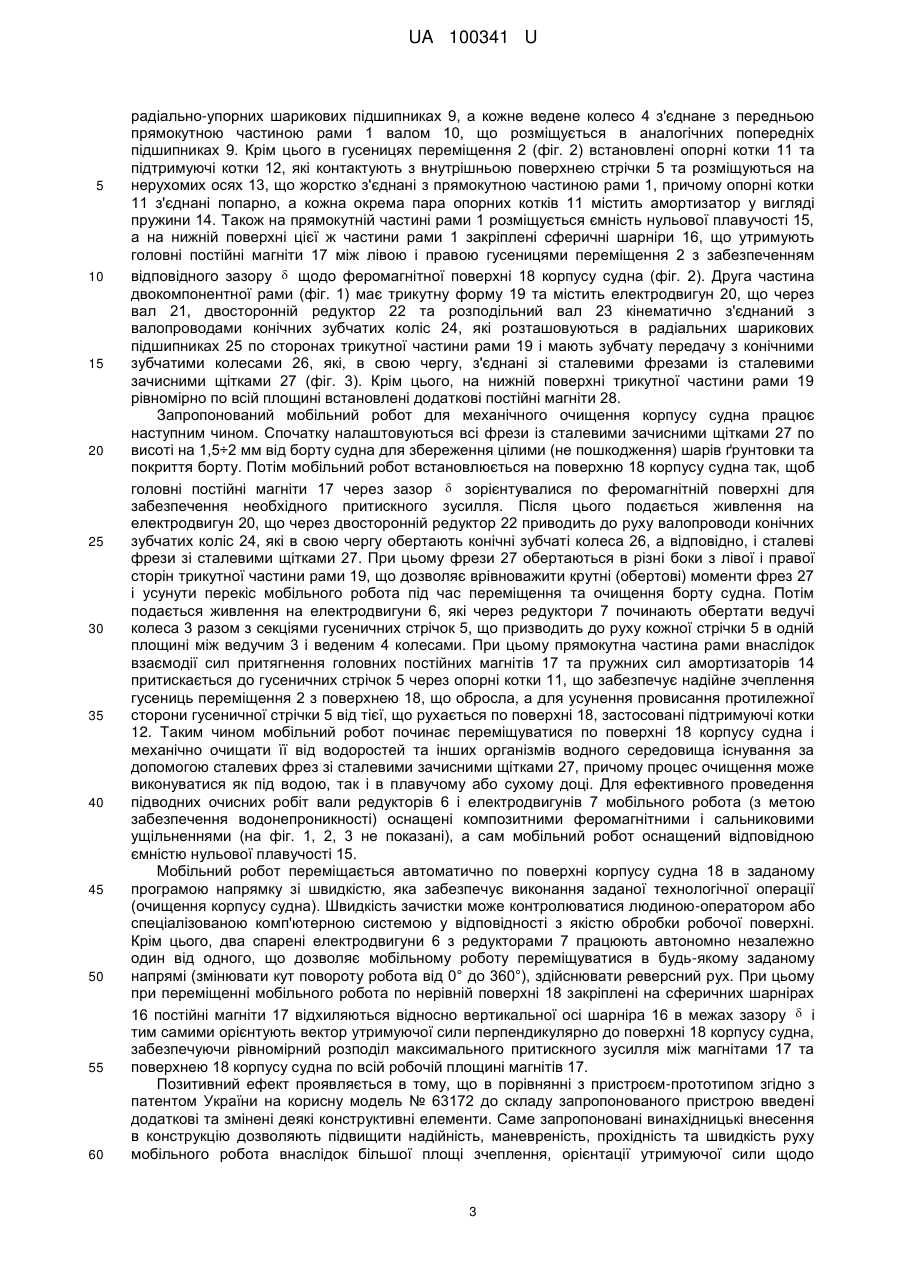
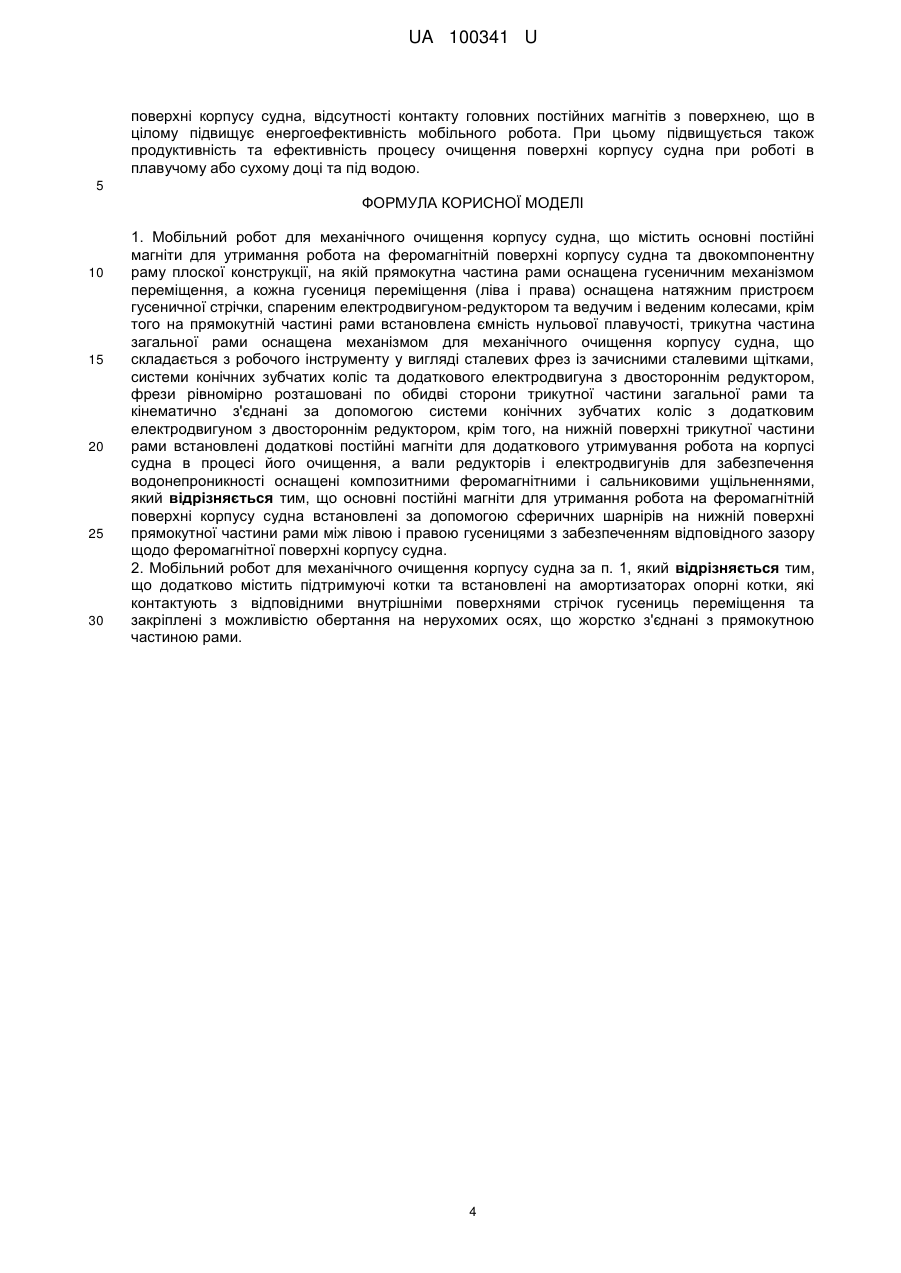
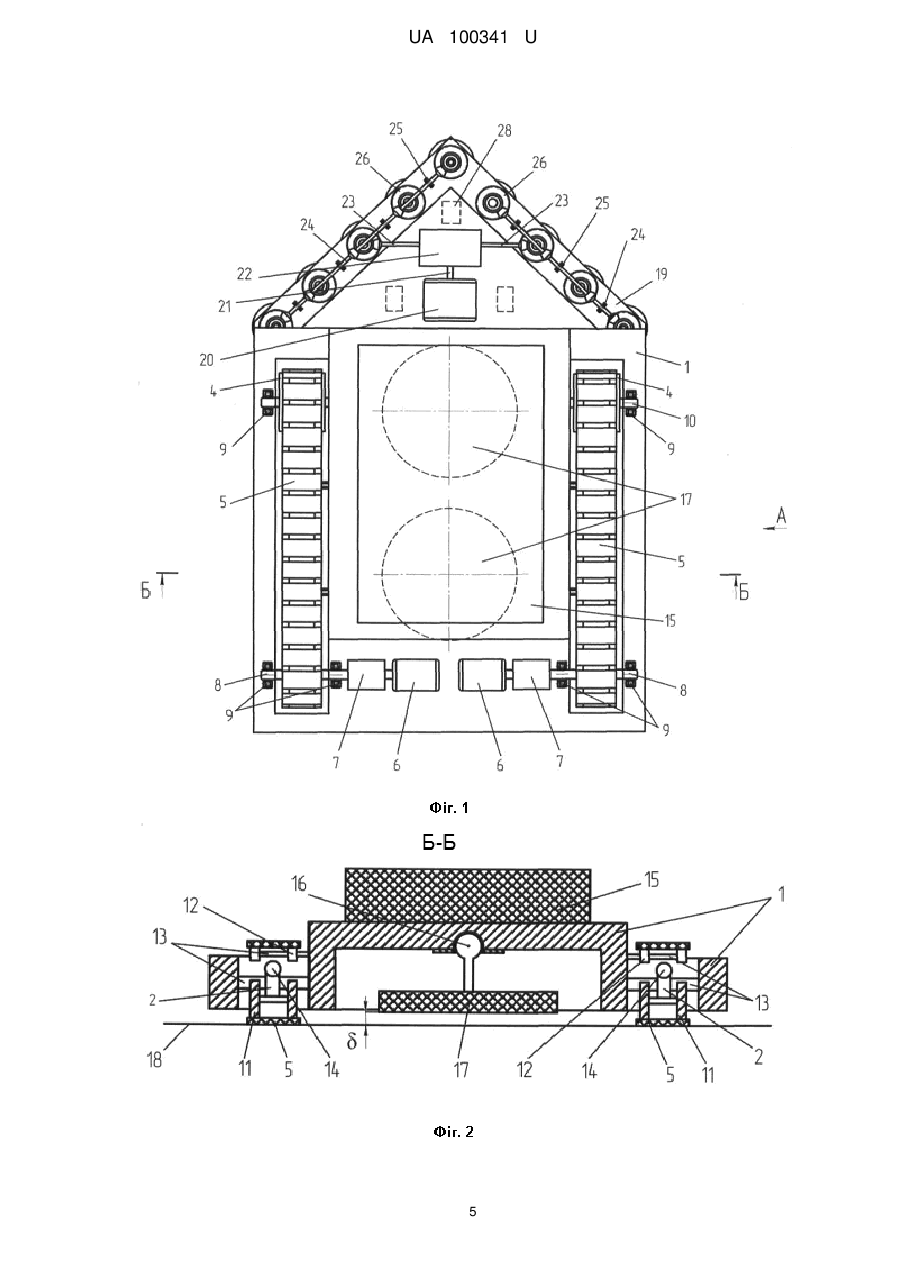
Реферат: Мобільний робот для механічного очищення корпусу судна містить основні постійні магніти для утримання робота на феромагнітній поверхні корпусу судна та двокомпонентну раму плоскої конструкції. Прямокутна частина рами оснащена ємністю нульової плавучості та гусеничним механізмом переміщення, а кожна гусениця переміщення (ліва і права) оснащена натяжним пристроєм гусеничної стрічки, спареним електродвигуном-редуктором та ведучим і веденим колесами. Трикутна частина загальної рами оснащена механізмом для механічного очищення корпусу судна, що складається з робочого інструменту у вигляді сталевих фрез із зачисними сталевими щітками, системи конічних зубчатих коліс та додаткового електродвигуна з двостороннім редуктором. Фрези рівномірно розташовані по обидві сторони трикутної частини загальної рами та кінематично з'єднані за допомогою системи конічних зубчатих коліс з додатковим електродвигуном з двостороннім редуктором. На нижній поверхні трикутної частини рами встановлені додаткові постійні магніти для додаткового утримування робота на корпусі судна в процесі його очищення, а вали редукторів і електродвигунів для забезпечення водонепроникності оснащені композитними феромагнітними і сальниковими ущільненнями. Основні постійні магніти встановлені за допомогою сферичних шарнірів на нижній поверхні прямокутної частини рами між лівою і правою гусеницями з забезпеченням відповідного зазору щодо феромагнітної поверхні корпусу судна. UA 100341 U (54) МОБІЛЬНИЙ РОБОТ ДЛЯ МЕХАНІЧНОГО ОЧИЩЕННЯ КОРПУСУ СУДНА UA 100341 U UA 100341 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузей суднобудування, судноремонту та робототехніки і може бути використана для очищення зовнішніх поверхонь судна від водоростей та інших організмів, що накопичуються шарами під час довготривалої експлуатації судна. Відомо про пристрої для підводного гідродинамічного очищення корпусу судна від обростання. В концепції цих пристроїв очищення поверхні здійснюється за рахунок високонапірних струменів робочого агенту, що вивільняється з обертаючих сопел. Прикладом такого пристрою для підводного гідродинамічного очищення корпусу судна є пристрій для підводного гідродинамічного очищення поверхні [Патент Російської Федерації № 2155698, кл. В63В59/08, 2000 p.], що має корпус з опорними колесами, маршовий і притискний рушії, а також колектор. На обертаючій частині колектора закріплені гідродинамічні сопла, виконані з можливістю фіксованого повороту на 360° відносно осі, перпендикулярної напрямку викиду струменя робочого агента. Пристрій забезпечений гідродинамічним кермом з тягою і регульованими захлопками. Обертаюча частина колектора кінематично зв'язана з маршовим рушієм, який виконано у вигляді гребного гвинта в насадці. Перед вхідною кромкою насадки встановлені регульовані захлопки, за вихідною кромкою насадки встановлене гідродинамічне кермо, що зв'язане тягою із задніми колесами. Колеса виконані поворотними, а їх вісь повороту зміщена щодо вертикальної осі коліс. Передні колеса розташовані всередині кільцевої зони впливу гідродинамічних сопел, а задні колеса - поза цією зоною. Такий пристрій має наступні недоліки: - низька надійність пристрою при роботі поблизу поверхні води (ватерлінія судна) через дію на пристрій і підвідний шланг досить великих динамічних навантажень від морського хвилювання, які можуть викликати непередбачені переміщення пристрою, а відповідно, і порушувати робочий режим процесу очищення; - обмеженість автоматичної керованості рухом пристрою, який самостійно рухається лише по прямолінійній траєкторії, для зміни напрямку руху (поворотів) пристрою необхідна допомога водолаза. Найбільш близьким за технічною суттю мобільним роботом до запропонованого є пристрій для механічного очищення корпусу судна [Патент України на корисну модель № 63172, МПК В63В59/00, 2011 p.], що прийнятий за прототип. Зазначений пристрій містить двокомпонентну раму плоскої конструкції, на якій прямокутна частина рами оснащена гусеничним механізмом переміщення, а кожна гусениця переміщення оснащена натяжним пристроєм гусеничної стрічки, спареними електродвигунами-редукторами та ведучим і веденим колесами, причому гусениці переміщення виконані з сталевих стрічок, що містять постійні магніти підвищеної тримаючої сили, крім того на прямокутній частині рами встановлена ємність нульової плавучості, трикутна частина загальної рами оснащена механізмом для механічного очищення корпусу судна, що складається з робочого інструменту у вигляді сталевих фрез із зачисними сталевими щітками, системи конічних зубчатих коліс та додаткового електродвигуна з двостороннім редуктором, фрези рівномірно розташовані по обидві сторони трикутної частини загальної рами та кінематично з'єднані за допомогою системи конічних зубчатих коліс з додатковим електродвигуном з двостороннім редуктором. Крім цього на нижній поверхні трикутної частини рами встановлені додаткові постійні магніти для додаткового утримування робота на корпусі судна в процесі його очищення, а вали редукторів і електродвигунів для забезпечення водонепроникності оснащені композитними феромагнітними і сальниковими ущільненнями. Такий пристрій має наступні недоліки: - низька надійність та невеликий термін експлуатації через те, що під час руху гусениць переміщення постійно відбуваються ударні механічні зіткнення (або співудари) постійних магнітів з робочою поверхнею, що призводять до розмагнічування та поступового руйнування магнітів; - низька енергоефективність та швидкодія процесу переміщення пристрою, оскільки при кожному наступному елементарному (одиничному) переміщенні пристрою, що еквівалентне розміру ширини одного постійного магніту гусеничної стрічки, відбувається відрив останнього в протилежному від напрямку руху постійного магніту в стрічці кожної гусениці переміщення, що призводить до виникнення додаткового опору руху пристрою і втрат додаткової електроенергії та вимагає застосування досить потужних двигунів з високими обертовим моментом та надвантажувальною здатністю; - обмеженість областей застосування та низька надійність процесів очищення та переміщення при роботі пристрою на нерівній робочій поверхні через можливий відрив однієї з гусениць переміщення від поверхні, що призведе до відриву другої гусениці переміщення від площини корпусу судна, а отже, пристрій може припинити процес очищення, від'єднається від поверхні та завдяки ємності нульової плавучості буде перебувати на певному рівні під водою. 1 UA 100341 U 5 10 15 20 25 30 35 40 45 50 55 60 В основу корисної моделі поставлено задачу удосконалення пристрою для механічного очищення корпусу судна шляхом введення до його складу додаткових компонентів і зміни конструктивного виконання пристрою, зокрема гусеничного механізму переміщення та елементів утримання мобільного робота на робочій поверхні, з метою зменшення енергоспоживання, підвищення швидкості, надійності та прохідності мобільного робота під час механічного очищення корпусу судна від накопичених водоростей і організмів водного середовища існування, що в цілому дозволить адаптувати його до ефективного функціонування на складних нерівних поверхнях, що обросли. Поставлена задача вирішується тим, що у мобільному роботі для механічного очищення корпусу судна, який містить основні постійні магніти для утримання робота на феромагнітній поверхні корпусу судна та двокомпонентну раму плоскої конструкції, на якій прямокутна частина рами оснащена гусеничним механізмом переміщення, а кожна гусениця переміщення (ліва і права) оснащена натяжним пристроєм гусеничної стрічки, спареним електродвигуномредуктором та ведучим і веденим колесами, крім того на прямокутній частині рами встановлена ємність нульової плавучості, трикутна частина загальної рами оснащена механізмом для механічного очищення корпусу судна, що складається з робочого інструменту у вигляді сталевих фрез із зачисними сталевими щітками, системи конічних зубчатих коліс та додаткового електродвигуна з двостороннім редуктором, фрези рівномірно розташовані по обидві сторони трикутної частини загальної рами та кінематично з'єднані за допомогою системи конічних зубчатих коліс з додатковим електродвигуном з двостороннім редуктором, крім того, на нижній поверхні трикутної частини рами встановлені додаткові постійні магніти для додаткового утримування робота на корпусі судна в процесі його очищення, а вали редукторів і електродвигунів для забезпечення водонепроникності оснащені композитними феромагнітними і сальниковими ущільненнями, згідно з корисною моделлю основні постійні магніти для утримання робота на феромагнітній поверхні корпусу судна встановлені за допомогою сферичних шарнірів на нижній поверхні прямокутної частини рами між лівою і правою гусеницями переміщення з забезпеченням відповідного зазору щодо феромагнітної поверхні корпусу судна, причому мобільний робот додатково містить підтримуючі котки та встановлені на амортизаторах опорні котки, які контактують з відповідними внутрішніми поверхнями стрічок гусениць переміщення та закріплені з можливістю обертання на нерухомих осях, що жорстко з'єднані з прямокутною частиною рами. Винахідницький задум полягає в тому, що особливості запропонованої конструктивної побудови мобільного робота для механічного очищення корпусу судна, які пов'язані з виконанням головних утримувальних магнітів у вигляді двох циліндрів, в яких діаметр значно перевищує висоту, та встановленням двох сферичних шарнірних з'єднань, що закріплюють ці магніти між гусеницями переміщення на нижній поверхні частини прямокутної рами мобільного робота, дозволяють підвищити надійність конструкції шляхом підвищення магнітної утримуючої сили робота, що діє на феромагнітну поверхню. Крім того наявність відповідного зазору між головними постійними магнітами та поверхнею дозволяє підвищити швидкість переміщення та прохідність мобільного робота, оскільки забезпечується можливість орієнтування зовнішньої площини головних утримувальних магнітів щодо площини корпусу судна, а також зменшити зносостійкість магнітів (відсутні раптово-ударні механічні зіткнення (співудари) постійних магнітів з робочою поверхнею) та енергоспоживання процесу пересування мобільного робота через відсутність додаткового опору рухові (немає необхідності у циклічному відриві постійних магнітів від феромагнітної поверхні під час руху). За рахунок введення в гусеничний механізм переміщення підтримуючих котків та встановлених на амортизаторах опорних котків підвищується зчеплення стрічок гусениць переміщення з робочою поверхнею, що при механічному очищенні корпусу судна підвищує прохідність, маневреність та швидкість пересування мобільного робота по робочій поверхні з будь-якими кутами нахилу. На фіг. 1 представлена схема мобільного робота для механічного очищення корпусу судна (вигляд зверху), штриховими лініями позначені елементи, які не видно на даному виді; на фіг. 2 - вигляд фіксації головного постійного магніту (переріз Б-Б на фіг. 1); на фіг. 3 - схема мобільного робота для механічного очищення корпусу судна (вид А на фіг. 1). Мобільний робот для механічного очищення корпусу судна містить суцільну двокомпонентну раму плоскої конструкції (фіг. 1, 3), на якій прямокутна частина рами 1 оснащена гусеничним механізмом переміщення, на кожну гусеницю переміщення 2 якого встановлені ведуче 3 і ведене 4 колеса, між якими за допомогою натяжного пристрою гусеничних стрічок (на фіг. 1, 2, 3 не показаний) натягнута стрічка 5, що виконана з фрикційного матеріалу. На задній прямокутній частині рами 1 кожне ведуче колесо 3 (фіг. 1) з'єднано з електродвигуном 6 та редуктором 7, причому електродвигун 6 разом з редуктором 7 спарені через вал 8, який розміщується в 2 UA 100341 U 5 10 15 20 25 30 35 40 45 50 55 60 радіально-упорних шарикових підшипниках 9, а кожне ведене колесо 4 з'єднане з передньою прямокутною частиною рами 1 валом 10, що розміщується в аналогічних попередніх підшипниках 9. Крім цього в гусеницях переміщення 2 (фіг. 2) встановлені опорні котки 11 та підтримуючі котки 12, які контактують з внутрішньою поверхнею стрічки 5 та розміщуються на нерухомих осях 13, що жорстко з'єднані з прямокутною частиною рами 1, причому опорні котки 11 з'єднані попарно, а кожна окрема пара опорних котків 11 містить амортизатор у вигляді пружини 14. Також на прямокутній частині рами 1 розміщується ємність нульової плавучості 15, а на нижній поверхні цієї ж частини рами 1 закріплені сферичні шарніри 16, що утримують головні постійні магніти 17 між лівою і правою гусеницями переміщення 2 з забезпеченням відповідного зазору щодо феромагнітної поверхні 18 корпусу судна (фіг. 2). Друга частина двокомпонентної рами (фіг. 1) має трикутну форму 19 та містить електродвигун 20, що через вал 21, двосторонній редуктор 22 та розподільний вал 23 кінематично з'єднаний з валопроводами конічних зубчатих коліс 24, які розташовуються в радіальних шарикових підшипниках 25 по сторонах трикутної частини рами 19 і мають зубчату передачу з конічними зубчатими колесами 26, які, в свою чергу, з'єднані зі сталевими фрезами із сталевими зачисними щітками 27 (фіг. 3). Крім цього, на нижній поверхні трикутної частини рами 19 рівномірно по всій площині встановлені додаткові постійні магніти 28. Запропонований мобільний робот для механічного очищення корпусу судна працює наступним чином. Спочатку налаштовуються всі фрези із сталевими зачисними щітками 27 по висоті на 1,5÷2 мм від борту судна для збереження цілими (не пошкодження) шарів ґрунтовки та покриття борту. Потім мобільний робот встановлюється на поверхню 18 корпусу судна так, щоб головні постійні магніти 17 через зазор зорієнтувалися по феромагнітній поверхні для забезпечення необхідного притискного зусилля. Після цього подається живлення на електродвигун 20, що через двосторонній редуктор 22 приводить до руху валопроводи конічних зубчатих коліс 24, які в свою чергу обертають конічні зубчаті колеса 26, а відповідно, і сталеві фрези зі сталевими щітками 27. При цьому фрези 27 обертаються в різні боки з лівої і правої сторін трикутної частини рами 19, що дозволяє врівноважити крутні (обертові) моменти фрез 27 і усунути перекіс мобільного робота під час переміщення та очищення борту судна. Потім подається живлення на електродвигуни 6, які через редуктори 7 починають обертати ведучі колеса 3 разом з секціями гусеничних стрічок 5, що призводить до руху кожної стрічки 5 в одній площині між ведучим 3 і веденим 4 колесами. При цьому прямокутна частина рами внаслідок взаємодії сил притягнення головних постійних магнітів 17 та пружних сил амортизаторів 14 притискається до гусеничних стрічок 5 через опорні котки 11, що забезпечує надійне зчеплення гусениць переміщення 2 з поверхнею 18, що обросла, а для усунення провисання протилежної сторони гусеничної стрічки 5 від тієї, що рухається по поверхні 18, застосовані підтримуючі котки 12. Таким чином мобільний робот починає переміщуватися по поверхні 18 корпусу судна і механічно очищати її від водоростей та інших організмів водного середовища існування за допомогою сталевих фрез зі сталевими зачисними щітками 27, причому процес очищення може виконуватися як під водою, так і в плавучому або сухому доці. Для ефективного проведення підводних очисних робіт вали редукторів 6 і електродвигунів 7 мобільного робота (з метою забезпечення водонепроникності) оснащені композитними феромагнітними і сальниковими ущільненнями (на фіг. 1, 2, 3 не показані), а сам мобільний робот оснащений відповідною ємністю нульової плавучості 15. Мобільний робот переміщається автоматично по поверхні корпусу судна 18 в заданому програмою напрямку зі швидкістю, яка забезпечує виконання заданої технологічної операції (очищення корпусу судна). Швидкість зачистки може контролюватися людиною-оператором або спеціалізованою комп'ютерною системою у відповідності з якістю обробки робочої поверхні. Крім цього, два спарені електродвигуни 6 з редукторами 7 працюють автономно незалежно один від одного, що дозволяє мобільному роботу переміщуватися в будь-якому заданому напрямі (змінювати кут повороту робота від 0° до 360°), здійснювати реверсний рух. При цьому при переміщенні мобільного робота по нерівній поверхні 18 закріплені на сферичних шарнірах 16 постійні магніти 17 відхиляються відносно вертикальної осі шарніра 16 в межах зазору і тим самими орієнтують вектор утримуючої сили перпендикулярно до поверхні 18 корпусу судна, забезпечуючи рівномірний розподіл максимального притискного зусилля між магнітами 17 та поверхнею 18 корпусу судна по всій робочій площині магнітів 17. Позитивний ефект проявляється в тому, що в порівнянні з пристроєм-прототипом згідно з патентом України на корисну модель № 63172 до складу запропонованого пристрою введені додаткові та змінені деякі конструктивні елементи. Саме запропоновані винахідницькі внесення в конструкцію дозволяють підвищити надійність, маневреність, прохідність та швидкість руху мобільного робота внаслідок більшої площі зчеплення, орієнтації утримуючої сили щодо 3 UA 100341 U поверхні корпусу судна, відсутності контакту головних постійних магнітів з поверхнею, що в цілому підвищує енергоефективність мобільного робота. При цьому підвищується також продуктивність та ефективність процесу очищення поверхні корпусу судна при роботі в плавучому або сухому доці та під водою. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 30 1. Мобільний робот для механічного очищення корпусу судна, що містить основні постійні магніти для утримання робота на феромагнітній поверхні корпусу судна та двокомпонентну раму плоскої конструкції, на якій прямокутна частина рами оснащена гусеничним механізмом переміщення, а кожна гусениця переміщення (ліва і права) оснащена натяжним пристроєм гусеничної стрічки, спареним електродвигуном-редуктором та ведучим і веденим колесами, крім того на прямокутній частині рами встановлена ємність нульової плавучості, трикутна частина загальної рами оснащена механізмом для механічного очищення корпусу судна, що складається з робочого інструменту у вигляді сталевих фрез із зачисними сталевими щітками, системи конічних зубчатих коліс та додаткового електродвигуна з двостороннім редуктором, фрези рівномірно розташовані по обидві сторони трикутної частини загальної рами та кінематично з'єднані за допомогою системи конічних зубчатих коліс з додатковим електродвигуном з двостороннім редуктором, крім того, на нижній поверхні трикутної частини рами встановлені додаткові постійні магніти для додаткового утримування робота на корпусі судна в процесі його очищення, а вали редукторів і електродвигунів для забезпечення водонепроникності оснащені композитними феромагнітними і сальниковими ущільненнями, який відрізняється тим, що основні постійні магніти для утримання робота на феромагнітній поверхні корпусу судна встановлені за допомогою сферичних шарнірів на нижній поверхні прямокутної частини рами між лівою і правою гусеницями з забезпеченням відповідного зазору щодо феромагнітної поверхні корпусу судна. 2. Мобільний робот для механічного очищення корпусу судна за п. 1, який відрізняється тим, що додатково містить підтримуючі котки та встановлені на амортизаторах опорні котки, які контактують з відповідними внутрішніми поверхнями стрічок гусениць переміщення та закріплені з можливістю обертання на нерухомих осях, що жорстко з'єднані з прямокутною частиною рами. 4 UA 100341 U 5 UA 100341 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюKondratenko Yurii Panteliiovych
Автори російськоюКондратенко Юрий Пантелеевич
МПК / Мітки
МПК: B25J 19/00
Мітки: очищення, судна, мобільній, механічного, робот, корпусу
Код посилання
<a href="https://ua.patents.su/8-100341-mobilnijj-robot-dlya-mekhanichnogo-ochishhennya-korpusu-sudna.html" target="_blank" rel="follow" title="База патентів України">Мобільний робот для механічного очищення корпусу судна</a>
Пристрій для механічного очищення корпусу судна
Номер патенту: 63172
Опубліковано: 26.09.2011
Автори: Жучинський Леонід Андрійович, Стоян Сергій Леонідович, Свистунов Микола Васильович
МПК: B63B 59/00
Мітки: пристрій, судна, корпусу, очищення, механічного
Формула / Реферат:
1. Пристрій для механічного очищення корпусу судна, що містить механізми переміщення пристрою і очищення корпусу судна - змінні електромагніти, привід робочих інструментів, встановлених на фермовій рамі, який відрізняється тим, що механізм переміщення оснащений гусеничним приводом, що містить дворядні сталеві ланки (типу пластинчастого ланцюга), на яких розміщені постійні магніти, а також тим, що сталеві ланки сполучаються між собою...
Пристрій для очищення корпусу судна
Номер патенту: 55166
Опубліковано: 17.03.2003
Автори: Ануфрієв Олександр Івановіч, Іванушкін Валерій Миколайович, Глазков-Степаненко Леонід Володимірович, Курнаєв Володимир Анатолійович
МПК: B24C 7/00, B63B 59/00, B24C 3/00
Мітки: судна, корпусу, пристрій, очищення
Формула / Реферат:
1. Пристрій для очищення корпусу судна, що містить бункер для абразивного матеріалу, трубопровід абразивної суміші, паливний бак з насосом, змонтовані на рухомій платформі, а генератор абразивного струменя встановлено з можливістю переміщення його відносно рухомої платформи і включає в себе циліндричний корпус з порожнинами охолодження, камерою згоряння паливно-повітряної суміші, до якої на вході генератора встановлено форсунку подання...
Пристрій для очищення корпусу судна
Номер патенту: 31528
Опубліковано: 15.12.2000
Автор: Іванушкін Валерій Миколайович
МПК: B63B 59/00, B24C 3/00, B24C 7/00
Мітки: очищення, корпусу, судна, пристрій
Формула / Реферат:
1. Пристрій для очищення корпусу судна, який містить бункер для абразивного матеріалу, трубопровід абразивної суміші, генератор абразивного струменю, що включає циліндричний корпус з порожнинами охолодження, у якому розташовано камеру згоряння паливо-повітряної суміші, до якої на вході генератора підведені форсунки подання палива, на виході генератора встановлено вихідне сопло, трубопровід абразивної суміші уведено у генератор абразивного...
Спосіб будівництва корпусу малого судна
Номер патенту: 56739
Опубліковано: 15.05.2003
Автор: Літвінов Юрій Олександрович
МПК: B63B 9/06
Мітки: будівництва, спосіб, корпусу, судна, малого
Формула / Реферат:
Спосіб будівництва корпусу малого судна, який включає формування каркаса корпусу судна з перевіркою його обводів по базових лініях стапеля і подальшим монтажем на каркасі корпусу судна листів обшивки, який відрізняється тим, що до виготовлених шпангоутних рамок каркаса корпусу судна на стенді кріплять технологічні стійки, кінці яких обмежені заданою висотою шпангоутної рамки корпусу судна над стапелем і шириною стапеля, після чого шпангоутні...
Спосіб герметизації пробоїн корпусу судна
Номер патенту: 65402
Опубліковано: 15.03.2004
Автори: Білявський Анатолій Федорович, Портнягіна Алла Анатоліївна
МПК: B63B 35/00
Мітки: судна, корпусу, герметизації, пробоїн, спосіб
Формула / Реферат:
Спосіб герметизації пробоїн корпусу судна, що включає герметизацію пробоїн речовинами і припинення течі води усередину корпуса, який відрізняється тим, що подають усередину пошкоджених відсіків корпусу судна кріогенний хладагент, заморожують і перетворюють там воду в лід, герметизують льодом пробоїни, припиняють течу води усередину корпусу і запобігають затопленню судна.
Попередній патент: Відбивач струму
Наступний патент: Застосування натрієвої солі гідроген сульфіду як засобу для зменшення гастротоксичності нестероїдних протизапальних засобів
Випадковий патент: Штам вірусу низькопатогенного грипу птиці а/чирянка/джанкой/4-17-11/10 н5n2