Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі
Номер патенту: 116294
Опубліковано: 10.05.2017
Автори: Збітнєв Павло Володимирович, Нєженцев Олексій Борисович

Формула / Реферат
Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, що включає керування рухом крана (візка) протягом гальмівного режиму руху, який відрізняється тим, що момент гальмування приводу пересування крана (візка) змінюють поетапно двигуном і механічним гальмом за законом:
![]() ,
,
де ![]() - середній момент двигуна механізму пересування крана (візка) в режимі гальмування;
- середній момент двигуна механізму пересування крана (візка) в режимі гальмування;
![]() - розрахунковий гальмівний момент колодкового гальма механізму пересування крана (візка), Н´м;
- розрахунковий гальмівний момент колодкового гальма механізму пересування крана (візка), Н´м;
![]() - номінальна швидкість руху крана, м/с;
- номінальна швидкість руху крана, м/с;
![]() - поточна швидкість руху крана, м/с.
- поточна швидкість руху крана, м/с.
Текст
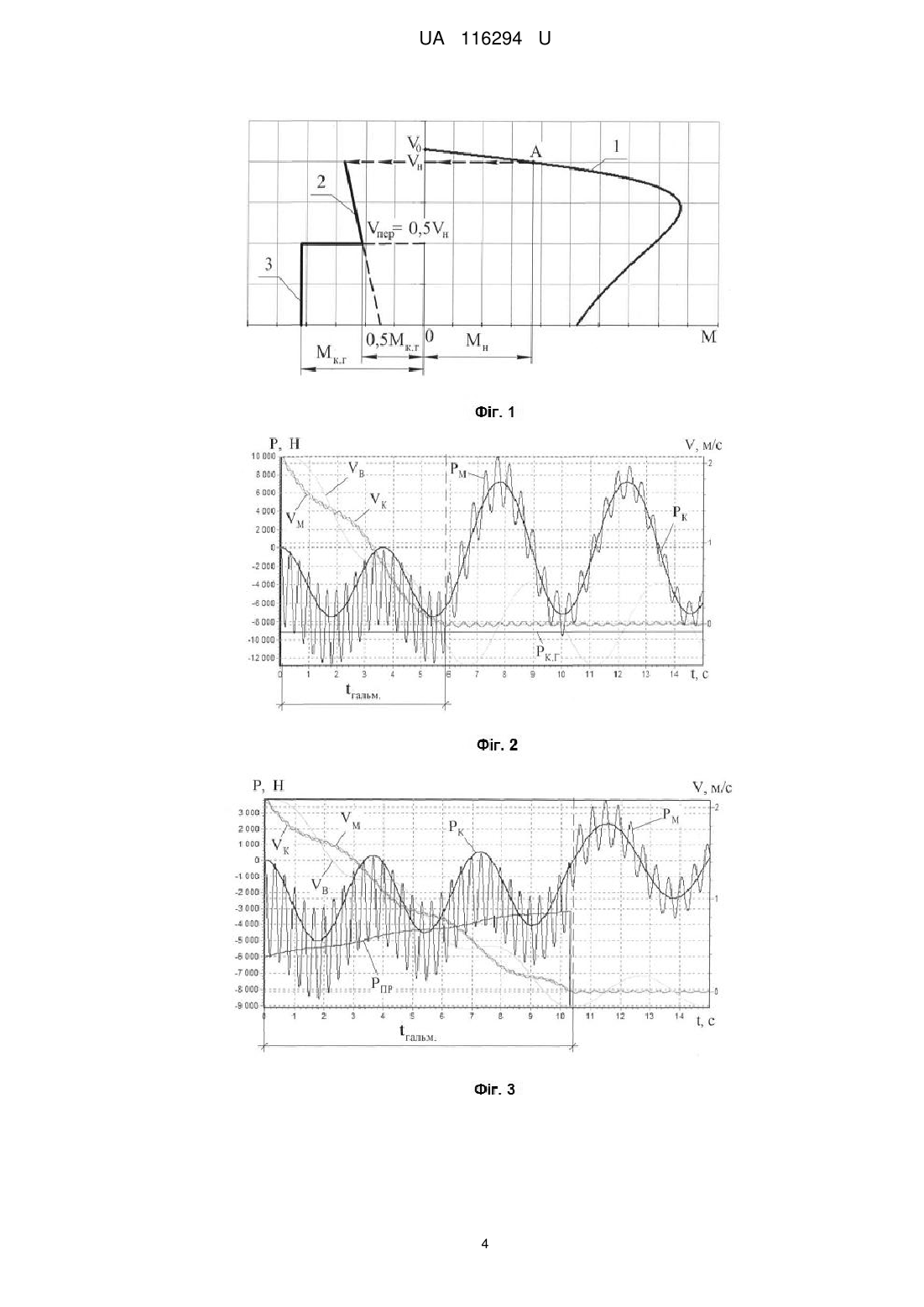
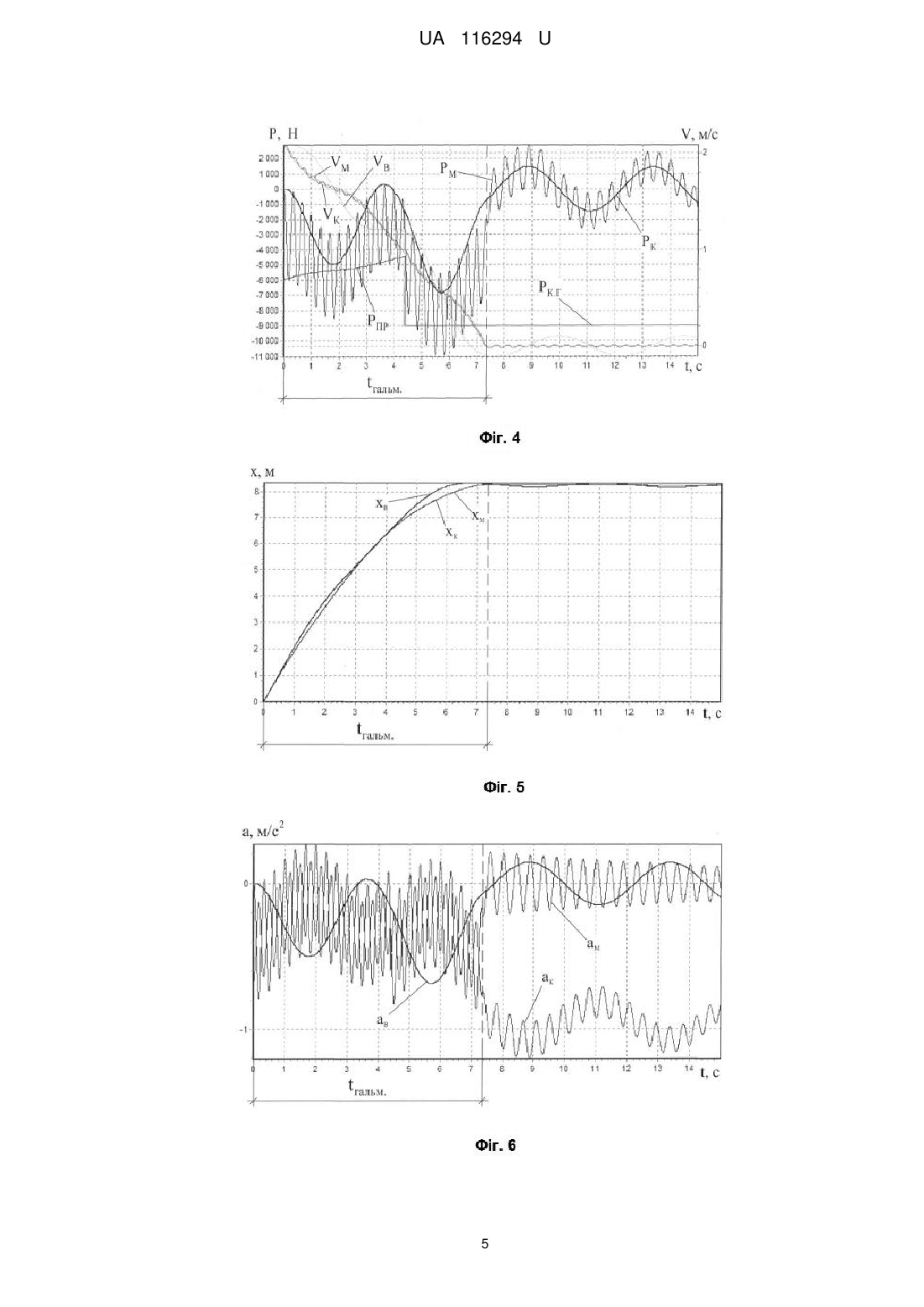
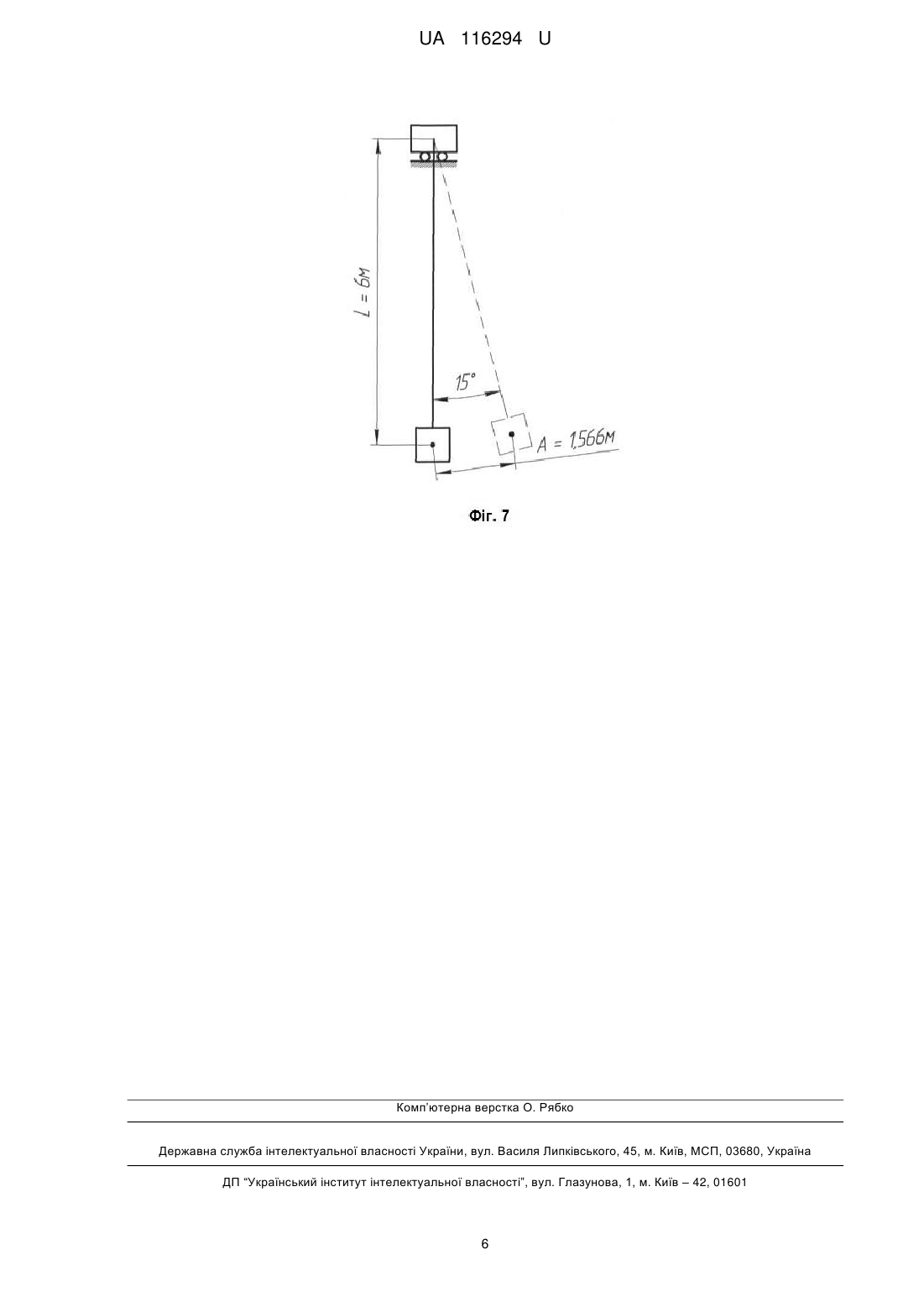
Реферат: Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, включає керування рухом крана (візка) протягом гальмівного режиму руху. Момент гальмування приводу пересування крана (візка) змінюють поетапно двигуном і механічним гальмом за законом: М д 0,5 М к.г , при 0,5Vн V Vн Mг . М к.г , при 0 V 0,5Vн UA 116294 U (54) СПОСІБ ЗМЕНШЕННЯ КОЛИВАНЬ ВАНТАЖУ, ЗАКРІПЛЕНОГО НА ГНУЧКОМУ ПІДВІСІ UA 116294 U UA 116294 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до способів керування робочими рухами механізмів підйомнотранспортних машин, зокрема до способів зменшення коливань вантажу, закріпленого на гнучкому підвісі при гальмуванні вантажопідйомних кранів та візків. Відомий спосіб керування механізмом переміщення кранового візка (патент України UA № 87236 С2 "Спосіб керування механізмом переміщення кранового візка", МПК В66С13/22, 13/04, опубл. 25.06.2009), що включає керування рухом візка протягом гальмівного режиму руху для усунення коливань вантажу, при якому задають швидкість руху візка, яка змінюється за законом у вигляді поліноміальної залежності від аргументу часу. Недоліком вказаного способу є те, що перед гальмуванням візка потрібно визначити час його гальмування, що в більшості випадків неможливо, тому що невідома відстань до місця зупинки візка. Крім того, швидкість візка на початку гальмування може відрізнятися від номінальної швидкості, що також ускладнює визначення часу гальмування візка. Відомий також спосіб для усунення коливань вантажу, відповідно до якого здійснюється керування рухом візка для усунення коливань вантажу протягом перехідних режимів руху. Таке керування дозволяє гальмувати візок крана за мінімально можливий час зі зменшенням коливань вантажу, причому величина відхилення вантажу від вертикалі обмежується (Григоров О.В., Петренко Н.О. Вантажопідйомні машини. - X.: ХТУ "ХПІ", 2006. - 304 с). Недоліком цього відомого способу є те, що керування рухом здійснюють при максимально можливих гальмуючих зусиллях. Причому ці зусилля миттєво змінюють свою величину на протилежне значення, що призводить до підвищення динамічного навантаження елементів приводу візка та в кінцевому випадку знижує їх надійність та термін служби. Найбільш близьким за технічною суттю до технічного рішення, що заявляється, є відомий спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі (патент України UA № 94511 С2 "Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі", МПК В66С13/06, 13/22, опубл. 10.05.2011), що включає керування рухом крана (візка) протягом гальмівного режиму руху для усунення коливань вантажу, при якому задають швидкість руху візка, яка змінюється за законом у вигляді поліноміальної залежності від аргументу часу. Недоліком прототипу є складність реалізації закону, за яким відбувається оптимальне управління, адже вказаний закон є поліномом високого порядку, а головне, таке керування пов'язане з використанням складної цифрової автоматизованої системи керування рухом крановими механізмами, обладнання якою навіть обмеженої кількості кранів, що експлуатуються, є або неможливим, або належить до дуже віддаленої перспективи. Це обумовлено як складністю та великою вартістю вказаної системи, так і її низькою надійністю. По-перше, така система потребує оснащення датчиками прискорень, пройденого шляху, швидкості та часу. І якщо датчики швидкості отримали розповсюдження та випускаються промисловістю, то надійних датчиків прискорень та пройденого шляху, які б широко застосовувались на діючих кранах, на сьогоднішній день не відомо. По-друге, цифрова автоматизована система керування потребує застосування потужного процесора з високою продуктивністю та швидкістю розрахунків в режимі реального часу для обробки сигналів від датчиків (особливо - датчиків прискорень) та вироблення і подачі керуючого сигналу до системи управління приводом пересування крана. Встановлення такого потужного процесора з розгалуженим інтерфейсом для багатьох датчиків дуже складно або неможливо навіть на кранах механоскладальних цехів (через наявність вібрацій металоконструкції крана, запиленості цеху, несприятливої температури та вологості середовища тощо). На кранах металургійних комбінатів, хімічних підприємств, складів сипучих матеріалів (на відкритому повітрі з від'ємними температурами взимку) реалізувати це буде ще складніше. У прототипі також вказано максимальний кут відхилення вантажу від вертикалі у процесі розгону, який склав 15°, що є недоліком. На сьогоднішній день висота підкранових рейок від підлоги у більшості цехів становить 12 м і вище. Тобто, якщо прийняти робочу висоту підйому вантажу рівною навіть половині від висоти підйому (6 м), то амплітуда розгойдування вантажу у процесі розгону складе 1,57 м (див. фіг. 7), що є дуже великою величиною. Наприклад, для перевантажувальних операцій, що здійснюються магнітними кранами за допомогою підйомного електромагніту у вагони або бункери максимальна амплітуда розгойдування вантажу не повинна перевищувати 0,5 м (тобто бути в три рази менше, ніж у прототипі, щоб влучити у вагони по ширині та не засипати колії). Для перевантажувальних операцій, які здійснюються за допомогою грейфера, значення амплітуди розгойдування вантажу має бути ще меншим, оскільки розміри грейфера значно більші за розмири електромагніту. Тому спосіб у прототипі є дуже складним та непридатним для значної кількості перевантажувальних операцій, що 1 UA 116294 U 5 10 15 20 здійснюється кранами через неприпустимо велике значення амплітуди розгойдування вантажу в перехідних процесах. Також серед недоліків прототипу є те, що в ньому наведено графіки перехідних процесів лише для розгону, при цьому невідомо як поведе себе вантаж після закінчення перехідного процесу, і в першу чергу після зупинки крана. Графіки перехідних процесів в період гальмування та після зупинки крана в прототипі не наведені взагалі, хоча вони більш вагомі ніж процеси розгону. Наші дослідження свідчать про те, що навіть при співпадінні швидкостей та переміщень вкінці процесу гальмування, мають місце значні коливання швидкості, прискорення та розгойдування вантажу після зупинки крана (див. фіг. 2: графіки швидкості вантажу VB; динамічного зусилля РК, діючого на вантаж, що пропорційне амплітуді розгойдування вантажу А). В основу корисної моделі покладено задачу вдосконалити спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, який забезпечує зниження динаміки гальмування вантажопідйомного крана зі зменшенням коливань вантажу після його зупинки одночасно з спрощенням закону керування рухом крана та підвищенням надійності процесу гальмування. Поставлена задача вирішується тим, що спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, який включає керування рухом крана (візка) протягом гальмівного режиму руху. Новим є те, що момент гальмування приводу пересування крана (візка) змінюють поетапно (двигуном і механічним гальмом) за законом: М д 0,5 М к.г , при 0,5Vн V Vн Mг , М к.г , при 0 V 0,5Vн де М д - середній момент двигуна механізму пересування крана (візка) в режимі гальмування; М к .г - розрахунковий гальмівний момент колодкового гальма механізму пересування крана 25 30 35 40 45 50 55 (візка), Нм; V н - номінальна швидкість руху крана, м/с; V - поточна швидкість руху крана, м/с. Таким чином, згідно з пропонованим способом, кран (візок) протягом гальмування рухається під дією гальмівного моменту (двигуна і механічного гальма), який змінюється поетапно в залежності від величини швидкості крана. Технічна суть пропонованого способу пояснюється графіками: на фіг. 1 показано механічні характеристики приводу пересування крана; на фіг. 2 наведено графік перехідного процесу при гальмуванні мостового крана колодковим гальмом (позначення на фіг. 2: VМ, VК, VВ – швидкості руху, відповідно, центральних частин моста крана, кінцевих балок та вантажу, м/с; РК.Г - сила колодкового гальма, що приведена до приводних коліс, Н; РМ, РК - зусилля, що діють на металоконструкцію крана та на вантаж, Н; на фіг. 3 наведено графік перехідного процесу при гальмуванні мостового крана в режимі противмикання (крім зазначених величин, РПР - сила приводу в режимі електричного гальмування (наприклад, противмикання), що приведена до приводних коліс, Н); на фіг. 4 показано графік перехідних процесів при гальмуванні пропонованим способом; на фіг. 5 наведено графік переміщень приведених мас крана при гальмуванні пропонованим способом (позначення на фіг. 5: хМ, хК, хВ - переміщення мас, приведених до центральної частини моста, кінцевих балок та вантажу, відповідно, м); на фіг. 6 представлено графік прискорень приведених мас крана при гальмуванні пропонованим способом (позначення на фіг.6: аМ, аК, аВ - прискорення мас, приведених, 2 відповідно, до центральної частини моста крана, кінцевих балок та вантажу, м/с ); на фіг. 7 наведено схему щодо визначення амплітуди розгойдування вантажу при відхиленні канатів на 15°, що є недоліком прототипу. Графіки перехідних процесів на фіг. 2-6 побудовано за результатами чисельного інтегрування системи диференційних рівнянь, що описують рух мостового крана вантажопідйомністю 10 т, представленого тримасовою розрахунковою схемою. Параметри мостового крана: вантажопідйомність 10 т, проліт L=22,5 м, номінальна швидкість пересування крана Vн=2,083 м/с, маса крана m1=16600 кг, маса візка m2=2600 кг, маса вантажу m3=10000 кг, довжина підвісу вантажу l=5 м. Спосіб реалізується наступним чином. У руховому режимі двигун механізму пересування крана (візка) працює на механічній характеристиці 1 в точці А (фіг. 1), розвиваючи номінальну швидкість Vн при номінальному 2 UA 116294 U 5 10 15 20 25 30 35 моменті Мн. На першому етапі процесу гальмування, за допомогою командоконтролера, двигун переводять у режим гальмування (наприклад, противмикання) на механічну характеристику 2, середній гальмівний момент якої МД дорівнює половині розрахункового моменту колодкового гальма Мк.г (що досягається, наприклад, введенням у ланцюг ротора двигуна опору відповідної величини). На другому етапі, після зниження поточної швидкості крана до величини Vпep=0,5VH (швидкість пересування крана вимірюється, наприклад, за допомогою тахогенератора), двигун крана вимикається, а кран гальмують за допомогою колодкового гальма по характеристиці 3 з розрахунковим гальмівним моментом Мк.г. Розрахунковий гальмівний момент Мк.г, на який налаштовується колодкове гальмо, вибирається з умови погашення кінетичної енергії крана та вантажу при пересуванні крана з номінальною швидкістю Vн, згідно з нормативною методикою. Гальмування ж на першому етапі у режимі електричного гальмування (наприклад, противмиканням або динамічним гальмуванням) з гальмівним моментом вдвічі меншим за розрахунковий дозволяє погасити частину кінетичної енергії крана. На другому етапі, після зменшення швидкості крана до половини від номінальної, двигун відключають від електроживлення та спрацьовує колодкове гальмо, яке діє до остаточної зупинки крана. При цьому динамічні навантаження на металоконструкцію крана та вантаж будуть значно меншими, ніж при традиційному гальмуванні тільки колодковим гальмом, або тільки двигуном - у режимі противмикання. Аналіз графіків на фіг. 2-6 показує, що пропонований спосіб дозволяє суттєво зменшити динамічні навантаження та коливання вантажу після зупинки крана. За допомогою цього способу вдається суттєво зменшити динамічні навантаження у порівнянні з гальмуванням тільки колодковим гальмом або тільки двигуном у режимі противмикання. При цьому найбільше відхилення вантажу від вертикалі у процесі гальмування не перевищило 0,35 м, а амплітуда розгойдування вантажу після зупинки склала лише 0,07 м. Таким чином, у пропонованому способі досягають позитивного ефекту в зменшенні розгойдування вантажу після зупинки крана (візка), що скоротить робочий цикл крана та підвищить його продуктивність, знизить динамічні навантаження на металоконструкцію крана, покращить умови роботи оператора крана. Для реалізації пропонованого способу не потрібно складного та дорого обладнання, а засоби, які використовуються для його реалізації (резистори, тахогенератори) є простими, надійними та давно перевіреними на діючих кранах. Пропонований спосіб може бути використаний в приводах пересування та повороту різних вантажопідйомних кранів. Особливо ефективним є його застосування на кранах, до роботи яких пред'являються підвищені вимоги до амплітуди розгойдування вантажу після зупинки крана при наявності високих номінальних швидкостей механізмів (наприклад, мостові та козлові грейферні або магнітні крани, а також портальні крани, що здійснюють перевантажувальні роботи з вагонами, бункерами, трюмами суден). Також пропонований спосіб доцільно застосовувати на кранах, де крім зменшення розгойдування вантажу пред'являються жорсткі вимоги до плавності гальмування (наприклад, металургійні крани: заливальні, міксерні, розливочні, колодцеві та ін.). 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, що включає керування рухом крана (візка) протягом гальмівного режиму руху, який відрізняється тим, що момент гальмування приводу пересування крана (візка) змінюють поетапно двигуном і механічним гальмом за законом: М д 0,5 М к.г , при 0,5Vн V Vн Mг , М к.г , при 0 V 0,5Vн де М д - середній момент двигуна механізму пересування крана (візка) в режимі гальмування; М к .г - розрахунковий гальмівний момент колодкового гальма механізму пересування крана 50 (візка), Нм; Vн - номінальна швидкість руху крана, м/с; V - поточна швидкість руху крана, м/с. 3 UA 116294 U 4 UA 116294 U 5 UA 116294 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B66C 13/06
Мітки: гнучкому, спосіб, коливань, підвісі, закріпленого, вантажу, зменшення
Код посилання
<a href="https://ua.patents.su/8-116294-sposib-zmenshennya-kolivan-vantazhu-zakriplenogo-na-gnuchkomu-pidvisi.html" target="_blank" rel="follow" title="База патентів України">Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі</a>
Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі
Номер патенту: 94511
Опубліковано: 10.05.2011
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/06, B66C 13/22
Мітки: зменшення, вантажу, підвісі, спосіб, закріпленого, гнучкому, коливань
Формула / Реферат:
Спосіб зменшення коливань вантажу, закріпленого на гнучкому підвісі, що включає керування рухом візка для усунення коливань вантажу протягом перехідних режимів руху, який відрізняється тим, що протягом розгону задають швидкість руху візка, яка змінюється за законом:,де - прискорення вільного...
Спосіб усунення коливань вантажу, закріпленого на гнучкому підвісі, при роботі кранового візка з непередбачуваними зовнішніми впливами
Номер патенту: 102280
Опубліковано: 25.06.2013
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/06, B66C 13/20
Мітки: зовнішніми, кранового, вантажу, усунення, підвісі, візка, коливань, впливами, гнучкому, роботи, спосіб, закріпленого, непередбачуваними
Формула / Реферат:
Спосіб усунення коливань вантажу, закріпленого на гнучкому підвісі, при якому виконують керування рухом кранового візка з вантажем на гнучкому підвісі, що включає вимірювання довжини гнучкого підвісу та маси вантажу, який відрізняється тим, що при гальмуванні кранового візка величину приводного зусилля, яка на нього діє, встановлюють через визначений проміжок часу з урахуванням першої, другої та третьої похідної за часом положення центру мас...
Пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка
Номер патенту: 94512
Опубліковано: 10.05.2011
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/22, B66C 13/06
Мітки: підвісі, пристрій, кранового, закріпленого, візка, коливань, вантажу, гнучкому, усунення
Формула / Реферат:
Пристрій для усунення коливань вантажу, закріпленого на гнучкому підвісі до кранового візка, що містить пульт керування оператора крана, силовий перетворювач, електропривод механізму переміщення візка, датчик довжини гнучкого підвісу, який відрізняється тим, що обладнаний датчиком маси вантажу та мікроконтролерною системою, яка першим цифровим входом сполучена з датчиком довжини гнучкого підвісу, другим - з пультом керування оператора крана,...
Спосіб керування крановим візком з вантажем на гнучкому підвісі
Номер патенту: 91263
Опубліковано: 12.07.2010
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/22, B66C 13/04
Мітки: підвісі, керування, спосіб, гнучкому, вантажем, крановим, візком
Формула / Реферат:
Спосіб керування крановим візком з вантажем на гнучкому підвісі, у якому на крановий візок діють з приводним зусиллям протягом перехідних режимів руху, який відрізняється тим, що приводне зусилля має плавний характер зміни в часі і описується виразом:,де nн - номінальна швидкість вантажного візка, м/с;g - прискорення вільного...
Спосіб керування вантажним візком з вантажем на гнучкому підвісі
Номер патенту: 92617
Опубліковано: 25.11.2010
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/00, B66C 13/22
Мітки: підвісі, спосіб, керування, візком, гнучкому, вантажем, вантажним
Формула / Реферат:
Спосіб керування вантажним візком з вантажем на гнучкому підвісі, що включає вимірювання довжини підвісу вантажозахватного пристрою, розгін вантажного візка з маневруванням для гасіння коливань вантажозахватного органу до досягнення номінальної швидкості з прискоренням , яке не перевищує максимально допустимого значення, який відрізняється тим, що додатково вимірюють масу вантажу, закріпленого на гнучкому підвісі, визначають час розгону, при...
Попередній патент: Спосіб лікування венозної еректильної дисфункції
Наступний патент: Мультиплексор на основі динамічних неоднорідностей
Випадковий патент: Спосіб ортодонтичного лікування скупченості фронтальних зубів у змінному прикусі