Пересувна машина для комплексної обробки горизонтальних і інших поверхонь
Формула / Реферат
Пересувна машина для комплексної обробки поверхонь, яка містить робочий орган з приводом, змонтований на опорній стійці привід, підйомно-спусковий механізм, змонтований на візку, яка відрізняється тим, що кондуктор містить привідний робочий орган, внутрішній і зовнішній диски, що закріплені на концентрично розміщених обертових в протилежні боки валах редукторного двигуна, який встановлений вертикально в обоймі з можливістю осьового переміщення, причому в корпусі обойми по осі симетрії розміщені гільзи, в яких встановлені підпружинені штоки, опори яких взаємодіють з корпусом редукторного двигуна, а обойма встановлена на нерухомих напрямних несучої форми з можливістю зворотно-поступального руху, а привід складається з реверсивного електродвигуна, який за допомогою тягового троса кінематичне з'єднаний з обоймою, напрямними роликами і кінцевими перемикачами, а підйомно-спусковий механізм виконаний у вигляді гідроциліндра, з'єднаного з несучою формою, містить механізм повороту, який складається з реверсивного електродвигуна, кінематично з'єднаного з черв'ячною парою, черв'ячного колеса, жорстко з'єднаного з гідроциліндром, обертового круга з опорними котками, який за допомогою рухомих опор і гідроциліндра сполучений з несучою формою.
Текст
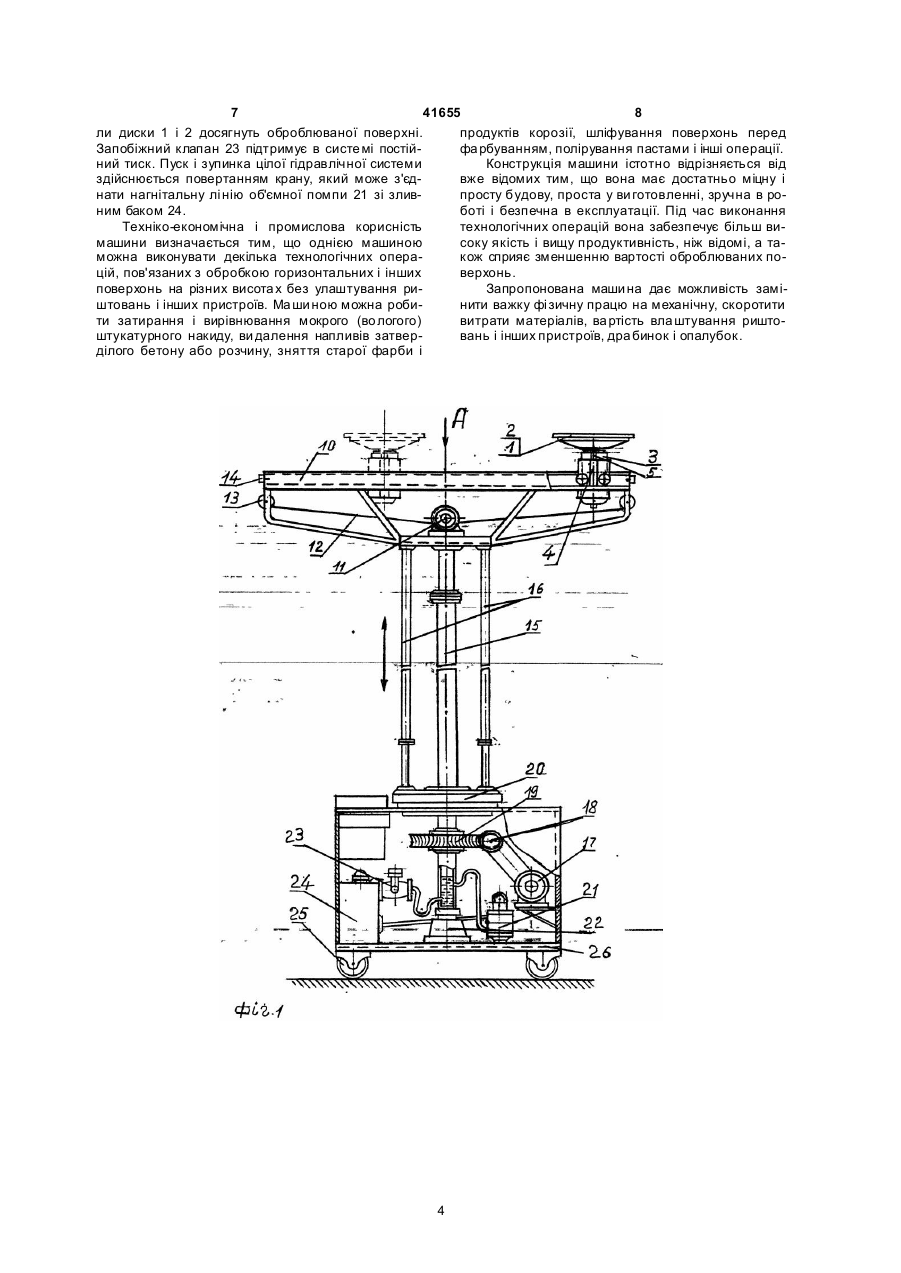
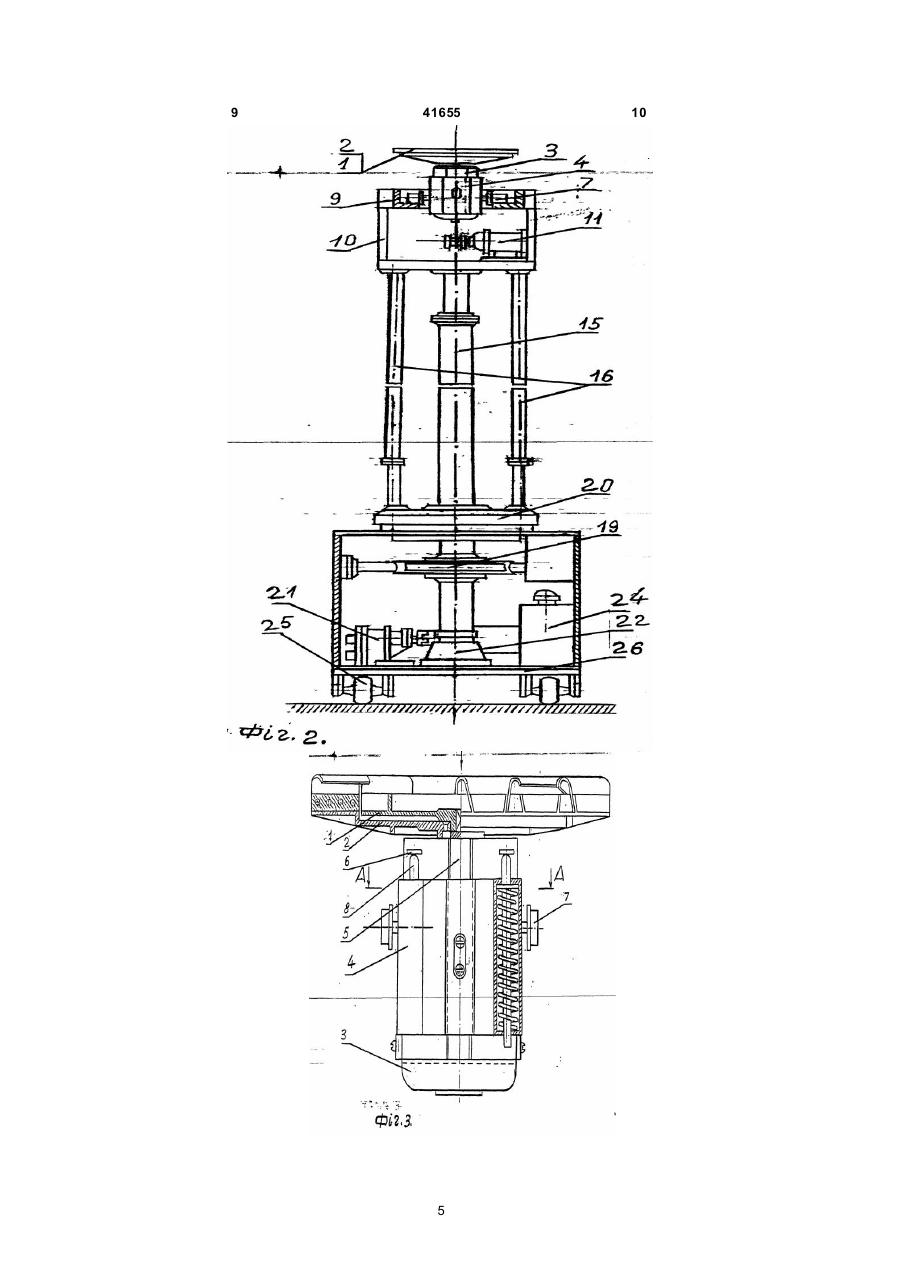
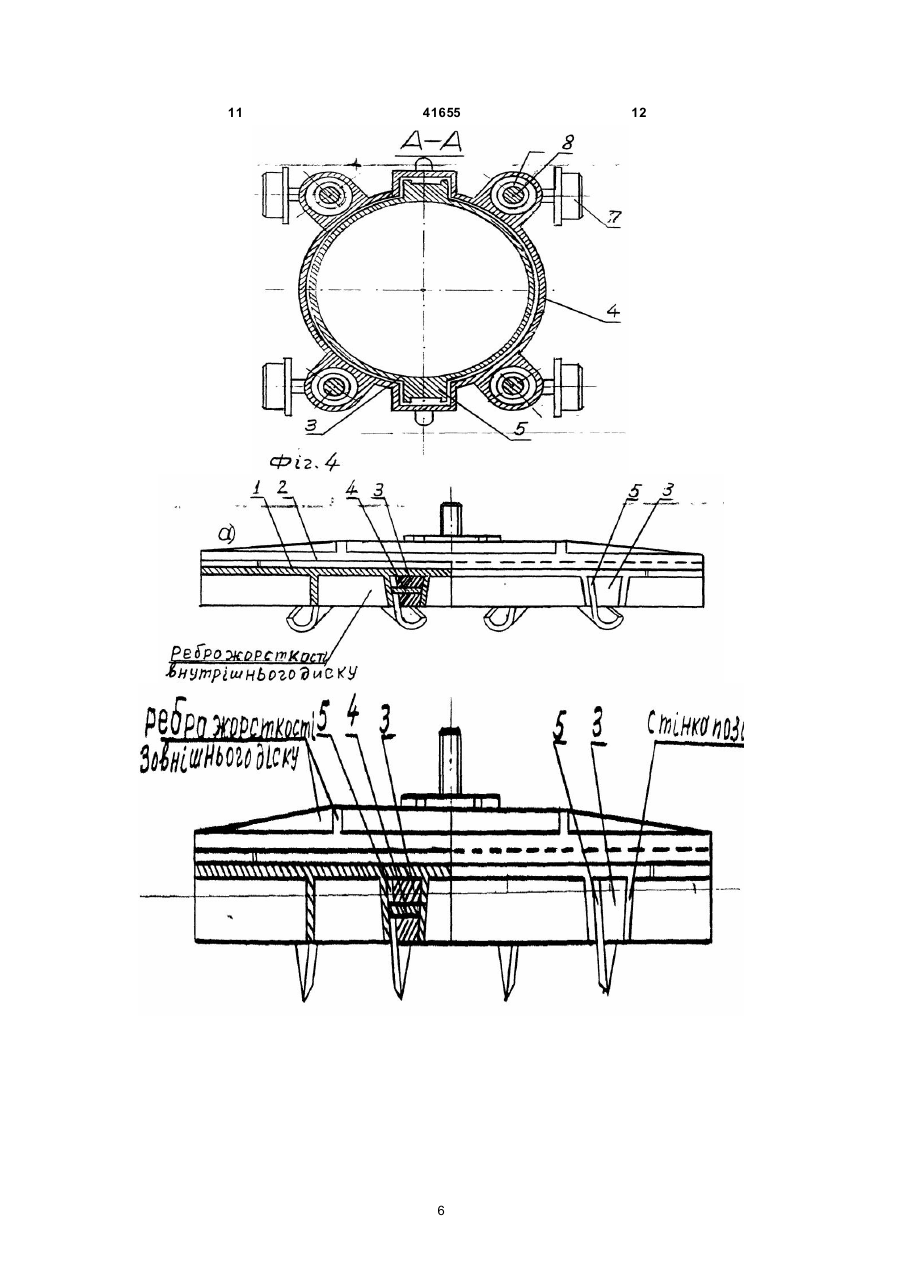
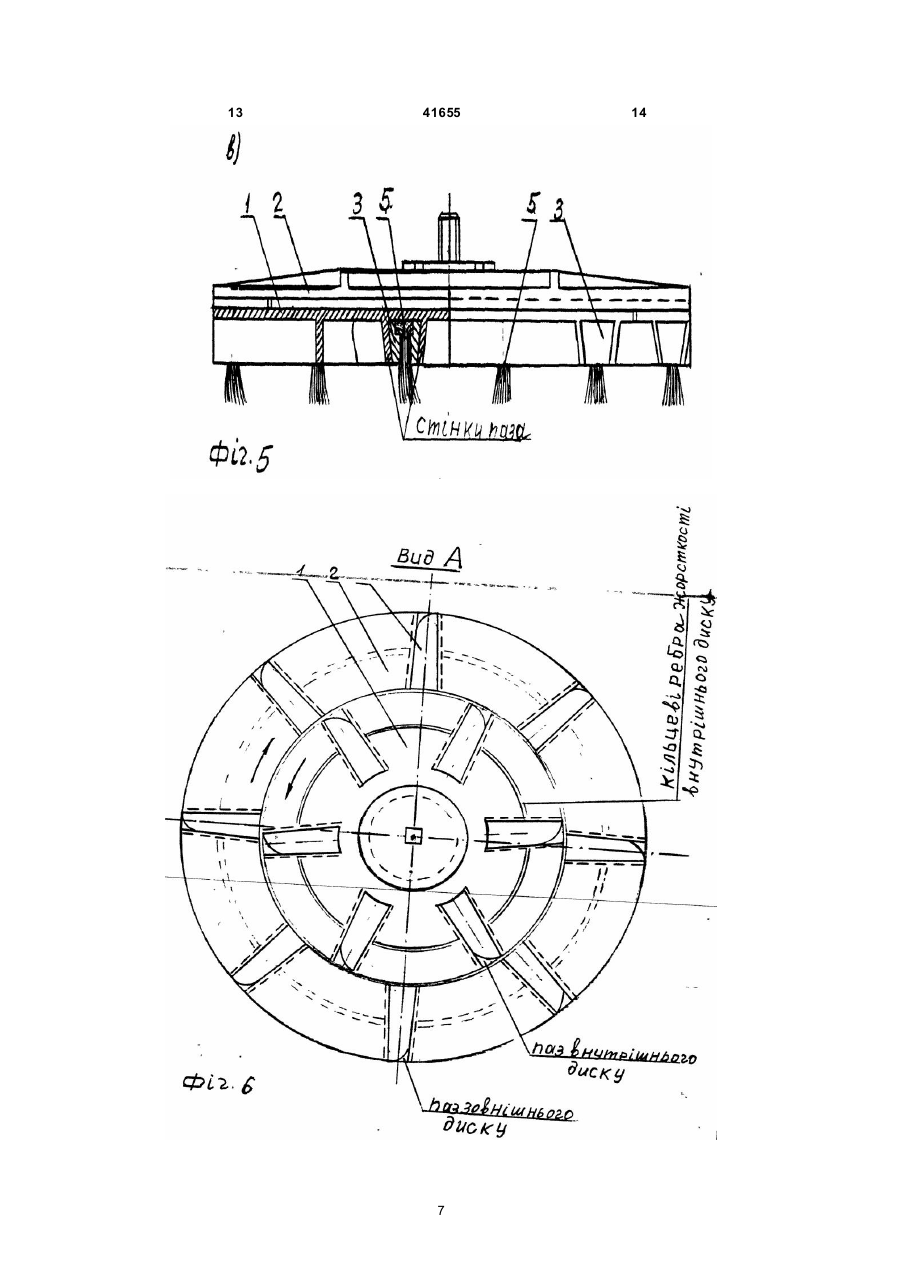
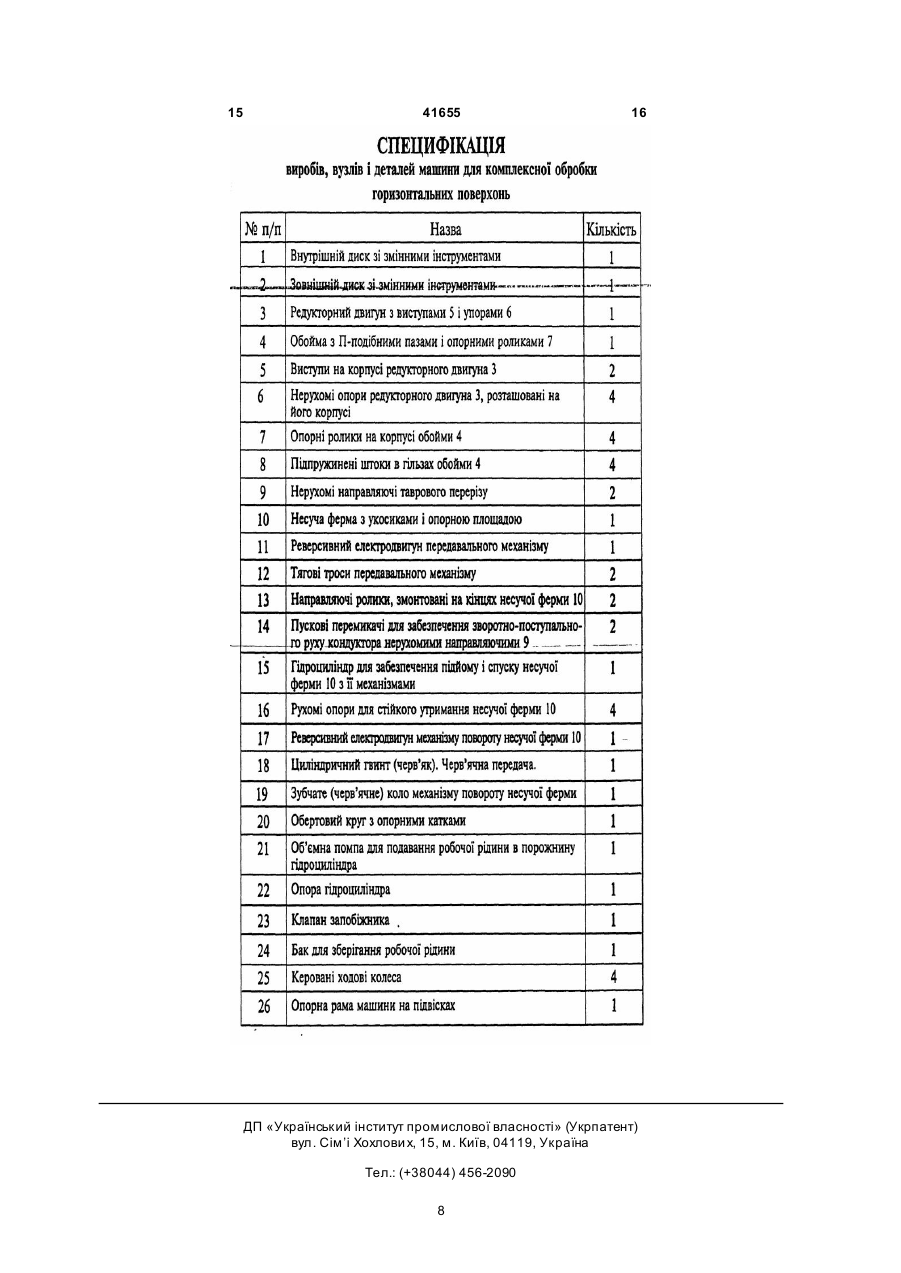
Пересувна маши на для комплексної обробки поверхонь, яка містить робочий орган з приводом, змонтований на опорній стійці привід, підйомно-спусковий механізм, змонто ваний на візку, яка відрізняється тим, що кондуктор містить привідний робочий орган, внутрішній і зовнішній диски, що закріплені на концентрично розміще них обертових в протилежні боки валах редукто рного двигуна, який встановлений вертикально в обоймі з можливістю осьового переміщення, причому в корпусі обойми по осі симетрії розміщені гільзи, в яких 3 41655 4 ві ребра жорсткості, причому в корпусі обойми по поверхню, зменшення вібрації і коливань, які утвоосі симетрії розміщені гільзи, в яких встановлені пірюються від обертання дисків, в боках обойми 4 дпружинені штоки, опори яких взаємодіють з корзнаходяться гільзи (гнізда), в яких розташовані пусом редукторного двигуна. Обойма встановлена пружини стискання з підпружиненими штоками 8, на нерухомих направляючих несучої ферми з можна які редукторний двигун 3 кондуктора спирається ливістю зворотно-поступального руху. Привід своїми нерухо мими упорами 6, які встановлені на складається з реверсивного електродвигуна, який корпусі редукторного двигуна 3. за допомогою тягового тросу кінематичне з'єднаДля забезпечення прямолінійного зворотно-ний з обоймою, направляючими роликами і кінцепоступального р уху робочого органу маши ни – ковими перемикачами. Підйомно-спусковий механдуктора – по нерухомих прямих горизонтальних нізм, виконаний у ви гляді гідроциліндру, з'єднаного направляючих 9, і несучої фе рми 10, машина обз несучою фе рмою, містить механізм повороту, ладнана передавальним механізмом, який змонтоякий складається з реверсивного електродвигуна, ваний всередині нерухо мої ферми 10 (див фіг. 1 і кінематичне з'єднаного з черв'ячною парою; черв'2) між перемикачами 14 і складається з реверсивячного колеса, жорстко з'єднаного з гідроциліндного дви гуна 11, кінемати чно з'єднаного за допором; оберто вого круга з опорними катками, який за могою тягового тросу 12 з вушками обойми 4, напдопомогою рухо мих опор і гідроциліндра сполучеравляючими роликами 13 і кінцевим перемикачем ний з несучою формою. 14. Конструкція машини пояснюється кресленняДля забезпечення періодичного зворотно - поми. На фіг. 1 машина зображена в зборі, загальний ступального піднімання і опускання несучої фе рми вигляд. На фіг. 2 – також загальний вигляд, вигляд 10 з її механізмами на різну ви соту, маши на облазбоку. На фіг. 3 – загальний вигляд кондуктора в днана піднімальним і опускальним механізмами. зборі з привідним робочим органом, на фіг. 4 – роОб'ємна помпа 21 через шланг подає робочу рі дизтин кондукто ра по А - А. На фіг. 5 і 6 – диски зі ну з баку 24 в порожнину гідроциліндра. Під дією змінними робочими інструментами робочого оргатиску робочої рідини поршень гідроциліндра 15 піна. днімає несучу фе рму 10 з кондукто ром і передаваМа шина (показано на фіг. 1 і 2) містить кондукльним меха нізмом до моменту, коли диски 1 і 2 ратор (пристрій) з двох оберто вих кільцевих ди сків зом з робочими інструментами досягнуть оброб(зовнішнього 1 і внутрішнього 2) з жорстко закріплювану поверхню. Під час роботи машини зворотленими робочими змінними інструментами.. Кільній клапан підтримує в гі дросистемі постійний тиск цеві обертові диски закріплені на концентрично роробочого інструмента на оброблювану поверхню, зміще них валах приводу, які обертаються в протиа після закінчення роботи несуча ферма 10 з її мележні боки. Привід виконано у вигляді редукторноха нізмами опускається під дією вла сної ваги. Рого двигуна 3, рухо мо вертикально встановленого в боча рідина з порожнини гідроциліндра 15 поверобоймі 4 з можливістю осьового переміщення в її тається в гі дробак 24. Об'ємна помпа 21, яка посередині за допомогою поздовжніх ви ступів 5, роздає робочу рідину в порожнину гі доцияіндра 15, міщених на його корпусі і взаємодіючих з П-подібприводиться в дію електродвигуном 17. З гідроциними пазами обойми 4, виконаними на її внутрішліндра 15 по гідрошлангу робоча рідина поступає ній поверхні. Вгорі корпуса редукторного двигуна 3 через запобіжний клапан 23 в гідробак 24. Таким наявні нерухомі виступи 6 для обмеження його чином утворюється замкнута робоча гідравлічна зворотно – поступального переміщення в межах система. довжини обойми 4. На боках обойми 4 знахо дятьМа шина також оснаще на меха нізмом поворося несучі опорні ролики 7, а також змонтовані підпту, який призначений для забезпечення обертання ружинені штоки 8, які рухо мо розміщені вздовж когідроциліндру 15 разом з рухо мим опорами 16 в рпусу обойми і взаємодіють своїми кігцями з нерувертикальній позиції, а несучу ферму 10 з передахо мими виступами 6 корпусу редукторного двигуна вальним меха нізмом і кондуктором в горизонталь3, які розміще ні на його верхній частині. Для приєній позиції на кут 360° в обох напрямах з швидкісднання кінців тя гового тросу 12 до обойми 4 з обох тю, яка забезпечує технологічний процес. Обербоків влашто вані вушка. Для обмеження ходу в тання здійснюється реверсивним двигуном 17 безмежах обойми в передній і задній части нах корпупосередньо через черв'як 18 і черв'ячне коло 19. су ре дукторного двигуна 3 передбачені нерухомі Для забезпечення міцного утримання і обертання задні і передні упори 6. у ве рти кальній позиції гідроциліндра 15 разом з Кондуктор під час виконання технологічних рухомими опорами 16, гідроциліндр 15 встановлеоперацій здійснює по нерухо мих направляючих 9 ний на обертовому крузі 20 і опорі 22. несучої фе рми 10 зворотно-поступальний рух з заКорпус машини виконаний у ви гляді прямокутданою величиною ходу, а кільцеві диски разом з ного паралелепіпеда, який опирається на чотири робочими інструментами оберта ються паралельно хо дові кола 25 (див фіг. 1 і 2). На го рі корпусу маоброблюваній поверхні в проти лежні боки по відшини змонто ваний обертовий круг 20 для міцного ношенню один до одного, що забезпечується реутримання вертикально встановленого гідроциліндукторним двигуном 3. Таким чином, основна обдру 15 з р ухомими опорами 16. Обертання круга робка здійснюється за рахунок зворотно-поступа20 разом з гідроциліндром 15 і рухо мими опорами льного руху кондуктора по нерухо мих направляюздійснюється черв'ячним механізмом, який складачих 9 і обертового руху ди сків 1 і 2 в протилежні ється з циліндричного гви нта 18 (че рв'яка), сполубоки з заданою частотою обертання кожного дисченого з ним зубчатого (черв'ячного) кола 19 і двику. Для забезпечення регулювання робочого тиску гуна. Разом вони утво рюють блок. Обертовий круг Р змінного робочого інструменту на оброблювану 20 опирається на котки, які переміщуються по ко 2 5 41655 6 ловій рейці. Рейка закріплена на горі корпуса мати мають різну конструкцію, і можуть бути виконані шини. На кришку гідроциліндра 15 і на верхні кінці у ви гляді завитка (фіг. 5а), пло ских ножів (фіг. 5б), рухомих опор 16 насаджена (змонтована) несуча заточених з одного боку під визначеним кутом, щідвоконсольна ферма з укосинами 10, остання має ток (фіг. 5в) і інш. Вставними робочими інструмендві паралельно змонтовані і горизонтально встатами 1 (див. фіг. 5а), ви готовленими з пружних мановлені профільні нерухо мі таверзи 9. теріалів (жорсткої гуми, пластиків і інш.) і які мають При обробці поверхні головні рухи — зво ротфо рму завитка, можна розрівнювати і затирати моно-поступальний рух кондуктора вздовж нерухокрий (вологий) штукатурний накид, цементні стяжмих направляючих 9 несучої фе рми 10 і оберто вий ки, плоскі і фасонні поверхні. рух кільцевих ди сків 1 і 2 разом з робочими інструВставні робочі інструменти 1 (див. фіг 5б), які ментами в протилежні боки з визначеною частомають фо рму прямого ножа і виготовлені з твердотою обертання кожного диску. Диски 1 і 2 зі змінниго матеріалу, закріплюються в пазах дисків під визми робочими інструментами обертаються параленаченим кутом. Такі ножі працюють як торцеві дисльно оброблюваній поверхні від ведучого вала рекові фрези. Цим інструментом можна обробляти дукторного двигуна 3. Робочий орган працює в кірізні тверді поверхні, знімати (зрізати) ста ру фа рнематичному поєднанні з іншими меха нізмами мабу, затверділий розчин, продукти корозії, а також шини і, руха ючись зворотно-поступально і паралевиконувати інші види пове рхневої обробки. льно оброблюваній поверхні, є головним виконуюЩітковими інструментами (фіг. 5в) в залежносчим органом (вузлом) маши ни. Переміщення конті від матеріалу, з якого вони виготовлені, можна дуктора здійснюється вздовж нерухомих направочистити металічні поверхні, шліфувати і поліруваляючих 9 несучої ферми 10 тягови ми тросами 12 ти поверхні і здійснювати інші те хнологічні операвід передаточного меха нізму. Кондуктор зворотноції. Щіточні інструменти закріплюються спочатку в поступальний рух вздовж нерухо мих направляюпосадочних колодках 2, а останні в пазах – дисків чих 9 отримує від реверсивного електродвигуна 11 без застосування шти фтів і фі ксуючих елементів. передаточного механізму. Для обмеження ходу коПісля того, як машина поста влена у ви хідне ндуктора вздовж нерухомих направляючих несучої положення і проведені всі підготовчі роботи, її під'фе рми 10 в ній наявні два шляхо ві перемикачі 14, єднують до електромережі і проводять функціонаякі закріплені на кінцях несучої фе рми 10. льні дії. При пуску машини спочатку вмикається Кондуктор пересувається з кільцевими дискаредукторний двигун 3 пристрою, потім реверсивми 1 і 2 вздовж нерухо мих направляючих 9 параний електродвигун 11 передавального меха нізму, лельно оброблюваній поверхні. Якісна обробка який забезпечує зво ротно - поступальний рух приздійснюється з заданим питомим тиском робочих строю вздовж нерухомих направляючих 9 несучої інструментів на оброблювану поверхню. Сила нафе рми 10. тиску робочих інструментів може бути відрегульоНати сканням кнопки «Пуск», встановленої на вана пружинами стиску, які встановлені в гільзах панелі пульта керування, об'ємна помпа 21 почиобойми 4, а також гідравлічним тиском, який ствонає подавати робочу рі дину в порожнину гідроцирюється помпою 21. ліндра 15, шток гідроциліндра виконує піднімання Піднімання і опускання несучої ферми 10 з її несучої фе рми 10 разом з привідним робочим ормеха нізмами здійснюється наступним чином. Об'єганом і передавальним механізмом до межі, поки мна помпа 21 через шланг подає робочу рідину з робочі інструменти (елементи) притиснуться до баку 24 в порожнину гі дроциліндра 15, де ство рюєоброблюваної поверхні, а чутливий апарат тиску ться тиск робочої рідини на поршень гідроциліндра зафі ксує заданий тиск на оброблювану поверхню. 15, який підносить несучу ферму 10 з кондуктором Після цього вмикається реверсивний електродвиі передавальним меха нізмом до межі, поки робочі гун 11 передавального меха нізму, який починає інструменти досягнуть (прити снуться) до оброблюздійснювати зворотно - поступальний рух пристваної поверхні. Під час піднімання несучої фе рми рою вздовж нерухо мих направляючих і та ким чи10 робоча рідина з об'ємної помпи 21 під тиском ном машина знахо диться в робочому стані, де ропо шлангу поступає в порожнину гі дроциліндра 15 бочі диски 1 і 2 разом із змінними робочими інструі тисне на поршень, який піднімає несучу фе рму 10 ментами, закріпленими в пазах дисків, оберта ютьз її механізмами наго ру. Робоча рідина — рідина ся паралельно оброблюваній поверхні в проти леждля живлення гідросистеми — засмоктується об'єні боки за допомогою ведучого валу редукторного мною помпою 21 з гідробаку 24 і подається в породвигуна 3. жнину гідроциліндра 15. Якісна обробка відбувається при заданому пиПісля закінчення роботи маши ни несуча фе ртомому ти ску Р інструментів на поверхню. ма 10 з її меха нізмами опускається під дією власПісля того, як робочі інструменти притиснуться ної ваги, при цьому робоча рідина з порожнини гіддо оброблюваної поверхні, а чутливий апарат тисроциліндра 15 повертається назад в гідробак 24. ку зафіксує заданий тиск, автоматично припинитьОбертання гідроциліндра 15 разом з ковзними ся піднімання несучої ферми 10 і меха нізм підйому опорами 16 в вертикальній площи ні, а несучої фебуде підтримувати тиск протягом всього проміжку рми 10 з її механізмами в горизонта льній площи ні часу до перестановки. на 360° в обох напрямках здійснюється реверсивПід час пуску робоча рідина з баку 24 подаєтьним двигуном 17 безпосередньо через черв'як 18 і ся робочою помпою 21 в порожнину гідроциліндру черв'ячне коло 19. 15, в якому ство рюється тиск робочої рідини. Під Комбінований інструмент дозволяє виконувати дією ти ску робочої рідини поршень гідроциліндру ряд технологічних операцій. В залежності від тех15 здійснює піднімання несучої фе рми 10 з пристнологічної операції вставні змінні робочі інструменроєм і передавальним механізмом до моменту, ко 3 7 41655 8 ли диски 1 і 2 досягнуть оброблюваної поверхні. продуктів корозії, шліфування поверхонь перед Запобіжний клапан 23 підтримує в систе мі постійфа рбуванням, полірування пастами і інші операції. ний тиск. Пуск і зупинка цілої гідравлічної системи Конструкція машини істотно відрізняється від здійснюється повертанням крану, який може з'єдвже відомих тим, що вона має достатньо міцну і нати нагнітальну лі нію об'ємної помпи 21 зі зливпросту будову, проста у ви готовленні, зручна в роним баком 24. боті і безпечна в експлуатації. Під час виконання Техніко-економічна і промислова корисність технологічних операцій вона забезпечує більш вимашини визначається тим, що однією машиною соку якість і вищу продуктивність, ніж відомі, а таможна виконувати декілька технологічних операкож сприяє зменшенню вартості оброблюваних поцій, пов'язаних з обробкою горизонтальних і інших верхонь. поверхонь на різних висота х без улаштування риЗапропонована маши на дає можливість заміштовань і інших пристроїв. Ма ши ною можна робинити важку фі зичну працю на механічну, скоротити ти затирання і вирівнювання мокрого (во логого) витрати матеріалів, ва ртість вла штування риштоштукатурного накиду, ви далення напливів затвервань і інших пристроїв, дра бинок і опалубок. ділого бетону або розчину, зняття старої фарби і 4 9 41655 5 10 11 41655 6 12 13 41655 7 14 15 41655 16 ДП «Український інститут промислової власності» (Укрпатент) вул. Сім’і Хохлови х, 15, м. Київ, 04119, Україна Тел.: (+38044) 456-2090 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E04F 21/02
Мітки: пересувна, обробки, комплексної, поверхонь, машина, інших, горизонтальних
Код посилання
<a href="https://ua.patents.su/8-41655-peresuvna-mashina-dlya-kompleksno-obrobki-gorizontalnikh-i-inshikh-poverkhon.html" target="_blank" rel="follow" title="База патентів України">Пересувна машина для комплексної обробки горизонтальних і інших поверхонь</a>
Пересувна буртоукладальна машина
Номер патенту: 21786
Опубліковано: 30.04.1998
Автори: Нєдзвєдскій Станіслав Івановіч, Донський Сергій Іванович, Семерік Іван Юхимович, Ромас Ніколай Андрєєвіч
МПК: B65G 63/00
Мітки: машина, буртоукладальна, пересувна
Формула / Реферат:
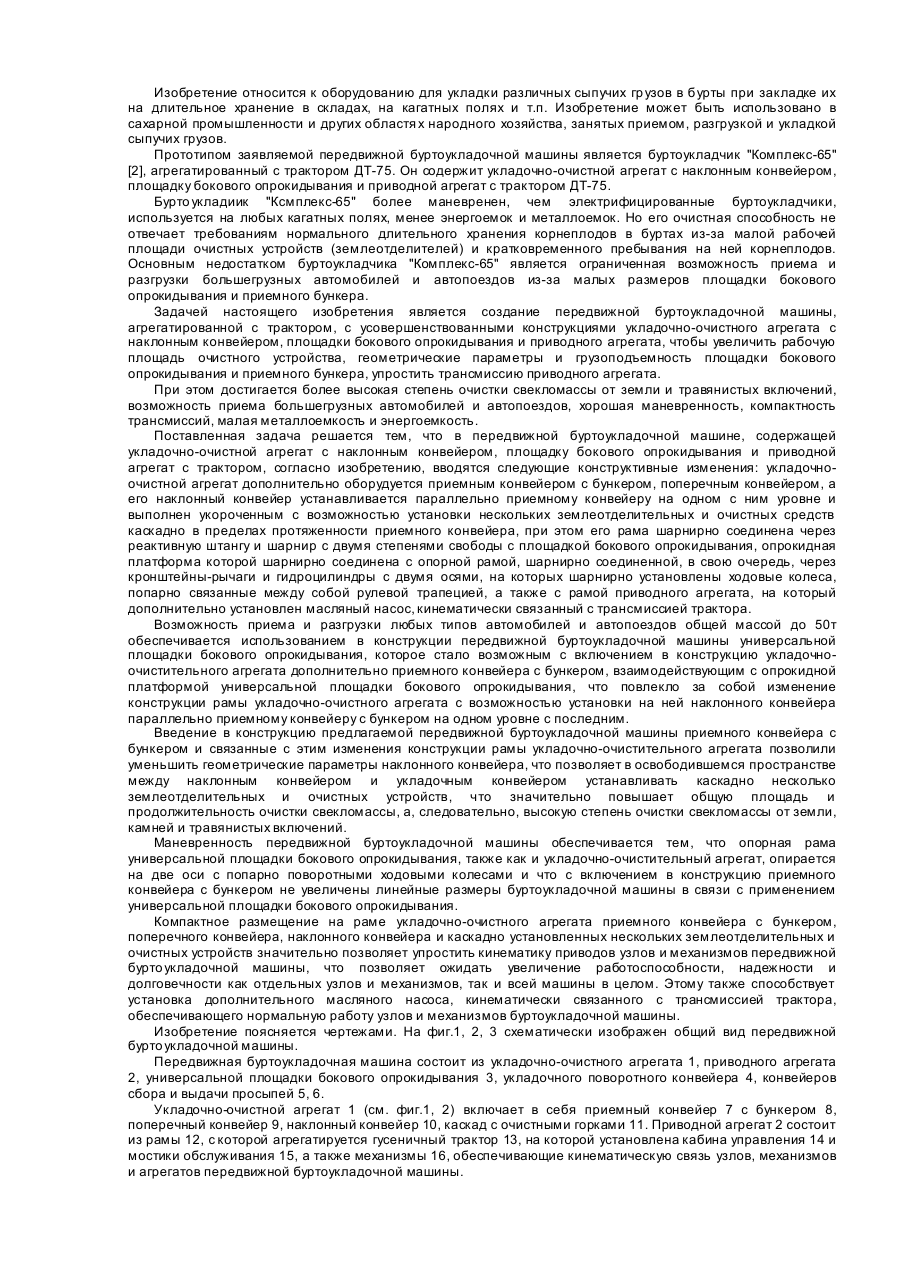
Передвижная буртоукладочная машина, содержащая укладочно-очистной агрегат с наклонным конвейером, площадку бокового опрокидывания и приводной агрегат с трактором, отличающаяся тем, что укладочно-очистной агрегат дополнительно оборудован приемным конвейером с бункером, поперечным конвейером, а его наклонный конвейер установлен параллельно приемному конвейеру и выполнен укороченным с возможностью установки нескольких землеотделительных и...
Пересувна виправочно-підбивочна машина

Номер патенту: 4771
Опубліковано: 28.12.1994
Автори: Йозеф Тойрер, Йоханн Хансманн
МПК: E01B 27/17
Мітки: машина, пересувна, виправочно-підбивочна
Формула / Реферат:
1. Передвижная выправочно-подбивочная машина, содержащая опирающуюся на ходовые тележки несущую раму с пультом управления, дополнительную раму, размещенную между ходовыми тележками, установленную с возможностью продольного перемещения приводом в виде силового цилиндра и одним концом опирающуюся на одноосную ходовую тележку, шпалоподбивочный рабочий орган, смонтированный на дополнительной раме с возможностью перемещения в вертикальной...
Пересувна виправочно-підбивочна машина

Номер патенту: 4772
Опубліковано: 28.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/17
Мітки: машина, виправочно-підбивочна, пересувна
Формула / Реферат:
1. Передвижная выправочно-подбивочная машина, содержащая опирающуюся на ходовые тележки несущую раму, дополнительную раму, размещенную между ходовыми тележками и установленную с возможностью продольного перемещения приводом по направляющим, которые смонтированы на несущей раме, шпалоподбивочный рабочий орган, смонтированный на дополнительной раме с возможностью перемещения в вертикальной плоскости приводом, смонтированный перед...
Пересувна шпалопідбивальна та виправочна машина
Номер патенту: 13196
Опубліковано: 28.02.1997
Автори: Фрідріх Пайтль, Вільгельм Прашл, Йозеф Тойрер
МПК: E01B 27/17
Мітки: виправочна, машина, шпалопідбивальна, пересувна
Формула / Реферат:
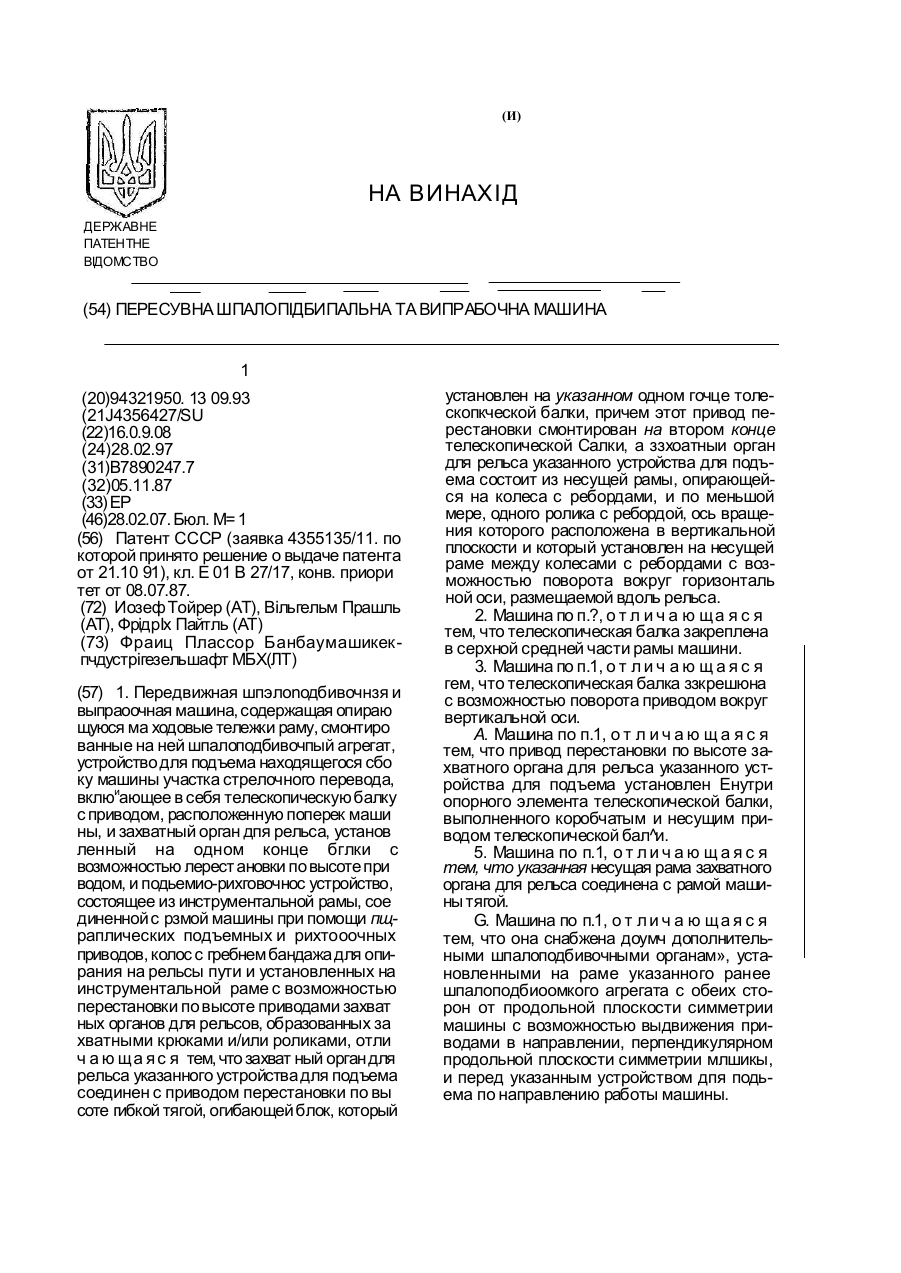
(57)1. Передвижная шпалoподбивочная ивыправочная машина, содержащая опирающуюся на ходовые тележки раму, смонтированные на ней шпалоподбивочный агрегат, устройство для подъема находящегося сбоку машины участка стрелочного перевода, включающее в себя телескопическую балку с приводом, расположенную поперек машины, и захватный орган дпя рельса, установленный на одном конце балки с возможностью лерестановки по высоте приводом, и...
Пересувна шпалопідбивочна нівеліровочна та рихтовочна машина
Номер патенту: 3605
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/17
Мітки: пересувна, машина, нівеліровочна, шпалопідбивочна, рихтовочна
Формула / Реферат:
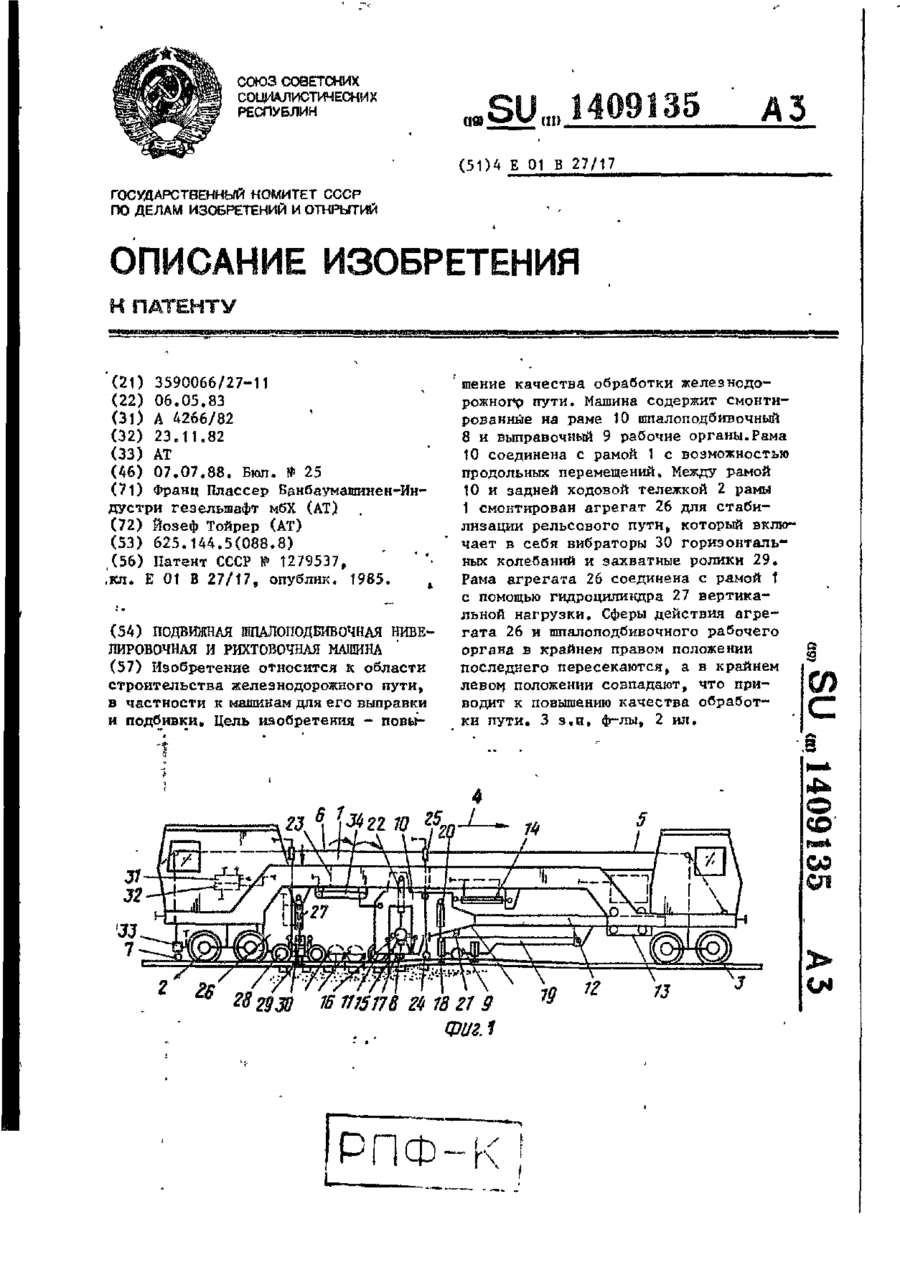
1. Подвижная шпалоподбивочная нивелировочная и рихтовочная машина, содержащая установленную на разнесенные ходовыстслежки раму, инструментальную раму с ходовой тележкой, смонтированную между указанными тележками с возможностью перемещения в вертикальной и горизонтальной плоскостях гидроцилиндрами, шарнирно соединенными с рамой, и несущую шпалоподбивочный рабочий орган, установленный с возможностью перемещения в вертикальной плоскости...
Попередній патент: Пристрій для цементування обсадної колони
Наступний патент: Освітлювальний пристрій
Випадковий патент: Спосіб отримання хлорангидридів 4-алкіл і 4-[(4-алкілциклогексіл)-метіл] бензойних кислот