Спосіб адаптивного керування з настроюваною моделлю в системах термінального керування
Номер патенту: 54135
Опубліковано: 25.10.2010
Автори: Іванов Борис Павлович, Кучеров Дмитро Павлович, Кузьменко Тетяна Петрівна, Копилова Зінаїда Миколаївна, Мельник Олександр Дмитрович, Чікалов Микола Андрійович
Формула / Реферат
1. Спосіб адаптивного керування з настроюваною моделлю в системах термінального керування, що включає попереднє встановлення в системі керування вхідних даних, що містять завдання, припустиму похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, розв'язувальну функцію, початкові значення її вагових коефіцієнтів, початковий сигнал керування в системі та в процесі руху вимірюють координати об'єкта керування, відхилення поточного стану об'єкта керування від кінцевого, в разі досягнення похибкою бажаного значення процес керування в системі завершують, який відрізняється тим, що в системі термінального керування додатково здійснюють зсув координат об'єкта керування на деяку величину, яку встановлюють на етапі підготовки вхідних даних.
2. Спосіб за п. 1, який відрізняється тим, що на етапі підготовки вхідних даних встановлюють дискретну модель об'єкта керування, початкові параметри якої вибирають довільно, початковий стан моделі встановлюють рівним початковому стану об'єкта керування, встановлюють також порогові рівні відхилення координат об'єкта керування від моделі, встановлюють і коефіцієнт підсилення, в процесі руху об'єкта проводять дискретизацію координат об'єкта керування, визначають міру їх відхилення від координат моделі.
3. Спосіб за п. 1, який відрізняється тим, що якщо відхилення координат об'єкта і моделі перебільшує значення встановленого рівня порогу, то перемножують сигнал керування із сигналами відхилення координат об'єкта керування від моделі та коефіцієнтом підсилення, результат множення додають до значень вагових коефіцієнтів настроюваної моделі, здійснюють зміну коефіцієнтів настроюваної моделі за результатами обчислення, перераховують коефіцієнти моделі в вагові коефіцієнти розв'язувальної функції.
Текст
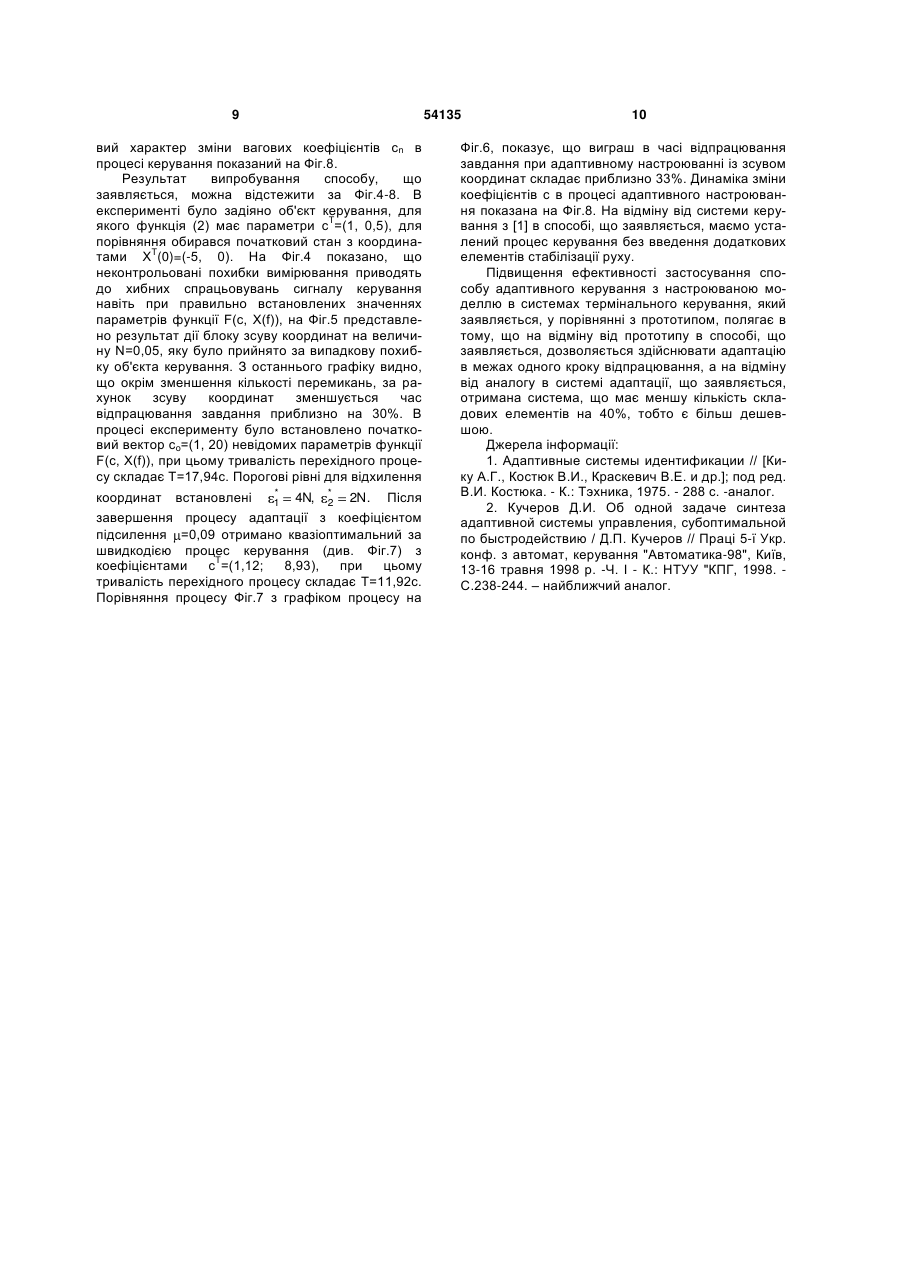
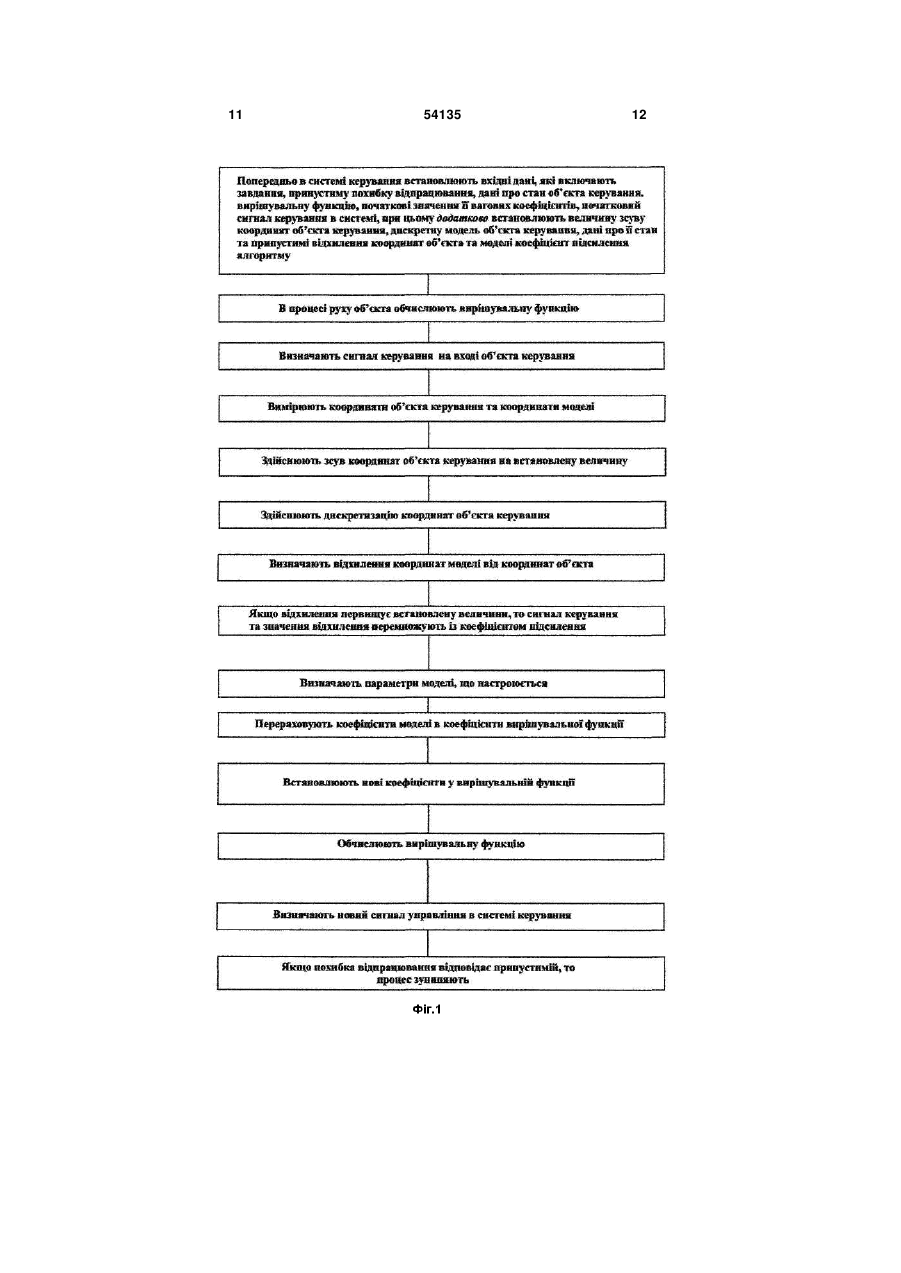
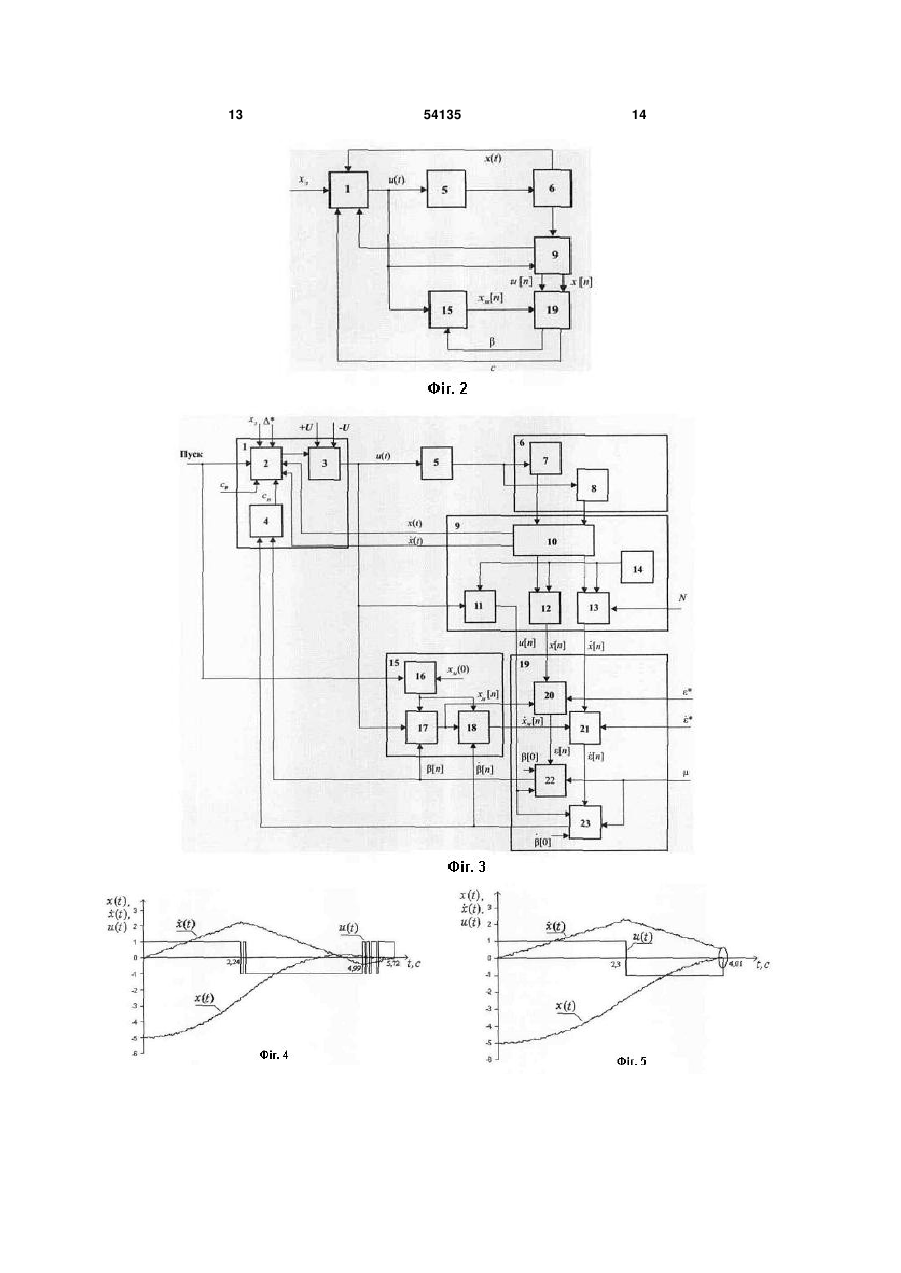
1. Спосіб адаптивного керування з настроюваною моделлю в системах термінального керування, що включає попереднє встановлення в системі керування вхідних даних, що містять завдання, припустиму похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, розв'язувальну функцію, початкові значення її вагових коефіцієнтів, початковий сигнал керування в системі та в процесі руху вимірюють координати об'єкта керування, відхилення поточного стану об'єкта керування від кінцевого, в разі досягнення похибкою бажаного значення процес керування в системі завершують, який відрізня ється тим, що в системі термінального керування додатково здійснюють зсув координат об'єкта керування на деяку величину, яку встановлюють на етапі підготовки вхідних даних. 2. Спосіб за п. 1, який відрізняється тим, що на етапі підготовки вхідних даних встановлюють дискретну модель об'єкта керування, початкові параметри якої вибирають довільно, початковий стан моделі встановлюють рівним початковому стану об'єкта керування, встановлюють також порогові рівні відхилення координат об'єкта керування від моделі, встановлюють і коефіцієнт підсилення, в процесі руху об'єкта проводять дискретизацію координат об'єкта керування, визначають міру їх відхилення від координат моделі. 3. Спосіб за п. 1, який відрізняється тим, що якщо відхилення координат об'єкта і моделі перебільшує значення встановленого рівня порогу, то перемножують сигнал керування із сигналами відхилення координат об'єкта керування від моделі та коефіцієнтом підсилення, результат множення додають до значень вагових коефіцієнтів настроюваної моделі, здійснюють зміну коефіцієнтів настроюваної моделі за результатами обчислення, перераховують коефіцієнти моделі в вагові коефіцієнти розв'язувальної функції. Корисна модель відноситься до галузі машинобудування, зокрема до способів адаптивного керування об'єктами, що рухаються, при рішенні задач керування кінцевим станом об'єкта керування, параметри якого точно невідомі чи змінюються на початку випробування системи та потребують додаткового часу настроювання регулятора, що має місце при керуванні курсом судна, літальним апаратом, робототехнічним пристроєм. Особливістю функціонування цих систем є залежність параметрів системи керування від неконтрольованих похибок вимірювання та навантаження, що приводить до необхідності їх настроювання на початку відпрацювання завдання. У корисній моделі розглядається система термінального керування, що вирішує завдання доставки фазових координат об'єкта керування. Залежність параметрів системи керування від неконтрольованих похибок та навантаження призводить до необхідності вирішення задачі побудови системи керування з параметрами системи, які точно невідомі та потребують додаткового настроювання. Структурно система керування для визначення такого завдання має інформаційну, керуючу частини та об'єкт керування. Особливістю такої системи для реалізації мінімального часу доставки фазових координат об'єкта керування до кінцевого стану є застосування релейного керування, при U 2 (13) 1 З 54135 КЕРУВАННЯ (11) (54) СПОСІБ АДАПТИВНОГО ТЕРМІНАЛЬНОГО КЕРУВАННЯ видається під відповідальність власника патенту UA ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС (19) МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ 3 цьому в керуючій частині діє сигнал керування максимальної амплітуди, знак якого змінюється на протилежний за необхідністю. З метою забезпечення найменшого часу відпрацювання завдання в умовах невідомих чи змінних параметрів система керування у своєму складі має пристрій адаптації параметрів керуючого пристрою, який за даними інформаційної частини та поточного керування формує нові значення параметрів для керуючого пристрою. Існуючі способи адаптації здатні підстроювати параметри регулятора в ході випробування чи після нього. В системах, до яких висуваються жорсткі вимоги до часу настроювання, використовуються адаптивні пристрої, що побудовані за першим типом, в цих системах підстроювання параметрів регулятора здійснюється за час роботи системи (час доставки фазових координат до кінцевого стану). Якщо до настроювання систем керування не висуваються вимоги за часом, то такі адаптивні системи будуються способами другого типу. Відомий спосіб адаптивного керування з настроюваною моделлю в системах термінального керування з мінімальним часом відпрацювання завдання оснований на використанні швидкодіючих прогнозуючих пристроїв, які будують лінію перемикання сигналу керування в скорішому масштабі часу. З метою формування команди на перемикання сигналу керування в виконавчому пристрої відомої системах використовуються дві моделі: самонастроювана та прогнозуюча. Невідомі параметри об'єкта визначаються за реакцією самонастроюваної моделі. За обраним показником якості знайдені невідомі параметри об'єкта використовуються прогнозуючою моделлю, яка будує прогнозну лінію перемикання. За даними прогнозної моделі та реакції керованого об'єкту на завдання автоматичним оптимізатором формуються команди, за якими здійснюється перемикання сигналу керування виконавчим пристроєм, що забезпечує оптимальне керування об'єктом в процесі випробування [1]. До недоліків такого способу термінального керування з настроюваною моделлю відносяться необхідність застосування в системі керування адекватних самонастроюваної та прогнозуючої моделей, а також складність системи, яка пов'язана з застосуванням додаткових елементів системи - прогнозуючої моделі та автоматичного оптимізатора та необхідністю врахування їх дій. Порушення умови адекватності погіршує точність відпрацювання системи та збільшує її складність, зростають витрати на створення додаткових елементів системи керування, які потрібно задіяти для покращення зазначеного показника. Найбільш близьким способом є спосіб адаптивного керування динамічним об'єктом, за яким в системі термінального керування встановлюють вхідні дані, що включають завдання, бажану похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, вирішувальну функцію, початкові значення її вагових коефіцієнтів, знак початкового сигналу керування в системі; в процесі руху обчислюють вирішувальну 54135 4 функцію, визначають сигнал керування на вході об'єкта керування, вимірюють координати об'єкта керування, відхилення поточного стану об'єкту керування від кінцевого, після закінчення випробування системи керування встановлюють нові значення вагових коефіцієнтів вирішувальної функції. Процес адаптації закінчується, коли вимоги за точністю системи керування задовольняються [2]. Недоліком способу адаптації є покрокове настроювання, за яким встановлення необхідних значень вагових коефіцієнтів здійснюється після закінчення випробування. Цей недолік унеможливлює настроювання системи керування в межах одного кроку випробування системи. В основу способу адаптивного керування з настроюваною моделлю в системах термінального керування за винаходом покладено завдання шляхом усунення недоліків прототипу забезпечити настроювання вагових коефіцієнтів вирішувальної функції в процесі відпрацювання завдання за рахунок введення в систему керування операцій зсуву координат об'єкта керування на встановлену величину, дискретизації координат об'єкта керування, введення моделі об'єкта керування, визначення відхилення координат моделі від координат об'єкта, введення також операції множення сигналів відхилення координат об'єкта від відповідних координат моделі із відповідним коефіцієнтом підсилення, визначення нових параметрів моделі та перераховування їх у коефіцієнти вирішувальної функції. Суть способу адаптивного керування з настроюваною моделлю в системах термінального керування, при якому в системі керування попередньо встановлюють вхідні дані, що включають завдання, припустиму похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, вирішувальну функцію, початкові значення її вагових коефіцієнтів, початковий сигнал керування в системі, та в процесі руху вимірюють координати об'єкта керування, відхилення поточного стану об'єкту керування від кінцевого, в разі досягнення похибкою бажаного значення процес керування в системі завершують, полягає в тому, що в системі термінального керування додатково здійснюють зсув координат об'єкта керування на деяку величину, яку встановлюють на етапі підготовки вхідних даних. Суть корисної моделі полягає і в тому, що на етапі підготовки вхідних даних встановлюють дискретну модель об'єкта керування, початкові параметри якої обираються довільно, початковий стан моделі встановлюють рівним початковому стану об'єкта керування, встановлюють також порогові рівні відхилення координат об'єкта керування від моделі, встановлюють і коефіцієнт підсилення, в процесі руху об'єкта проводять дискретизацію координат об'єкта керування, визначають міру їх відхилення від координат моделі. Суть корисної моделі полягає також і в тому, що якщо відхилення координат об'єкта і моделі перебільшує значення встановленого рівню порогу, то перемножують сигнал керування, із сигналами значення відхилення координат об'єкта керування від моделі та коефіцієнтом підсилення, результат 5 множення додають до значень вагових коефіцієнтів настроюваної моделі, здійснюють зміну коефіцієнтів настроюваної моделі за результатами обчислення, перераховують коефіцієнти моделі в вагові коефіцієнти вирішувальної функції. Порівняльний аналіз способу, який заявляється, із найближчим аналогом дозволяє дійти висновку, що спосіб адаптивного керування в системах термінального керування, відрізняється тим, що при встановленні вхідних даних в системі керування додатково вводиться величина зсуву координат об'єкта керування, дискретна модель об'єкта керування, що настроюється, вводиться рівень порогу, з яким далі порівнюється міра відхилення координат об'єкта керування і моделі, та коефіцієнт підсилення, після завершення заходів щодо введення початкових даних додатково вводиться операція дискретизації координат об'єкта керування, вимірюється відхилення координат об'єкта керування від відповідних координат моделі, вводиться значення порогового відхилення координат об'єкта керування та моделі, при перебільшенні відхилення координат об'єкта керування та моделі встановленого порогового рівню здійснюється додатково операція множення сигналу керування, сигналів відхилення координат об'єкта від моделі та коефіцієнту підсилення, результат множення додають до встановлених значень коефіцієнтів моделі. На заключній стадії формування поточного сигналу керування при обчисленні вирішувальної функції використовують нові значення вагових коефіцієнтів, які перераховані з отриманих значень відповідних коефіцієнтів моделі. Таким чином, спосіб адаптивного керування в системах термінального керування, який заявляється, відповідає критерію корисної моделі "новизна". Суть способу пояснюється за допомогою ілюстрацій, на Фіг.1 показано послідовність дій виконання способу, що заявляється, на Фіг.2 приведено загальний вигляд блок схеми пристрою, в якому реалізується спосіб адаптивного керування, що заявляється, на Фіг.3 представлений розгорнутий вигляд блок-схеми пристрою, що реалізує спосіб, який заявляється, на Фіг.4 показано динаміку об'єкта керування з початковою установкою дійсних коефіцієнтів без врахування зсуву координат, на Фіг.5 показано дію зсуву координат при відпрацюванні завдання, на Фіг.6 показано відпрацювання об'єкта керування завдання без адаптації, на Фіг.7 пояснюється ефект адаптації в часовій площині, на Фіг.8 показано процес настроювання вагових коефіцієнтів. Послідовність виконання дій в способі адаптивного керування з настроюваною моделлю в системах термінального керування пояснюється схемою на Фіг.1, де показано, що перед початком функціонування в системі керування встановлюють вхідні дані, які складаються з завдання для системи термінального керування, припустимої похибки * відпрацювання завдання об'єктом керування, даних про початковий х(0) стан об'єкта керування та моделі хм(0), вирішувальної функції F(c, X(t)), початкового вектору настроюваних 54135 6 параметрів с0, початкового сигналу керування u(0) на вході об'єкта керування, величини зсуву координат об'єкта керування N, дискретної моделі об'єкта керування, даних про її стан, припустимі відхилення координат об'єкта керування та моделі, коефіцієнт підсилення . При пуску системи термінального керування обчислюється вирішувальна функція F(c, X(f)) за знаком якої визначають знак сигналу керування на вході об'єкта керування. Далі, в процесі руху об'єкта вимірюють координати X(t) динамічного об'єкта, здійснюють їх зсув на величину N. Проводять дискретизацію зсунутих координат об'єкта керування з періодом дискретизації Т. Контролюють координати моделі xм(t) для того ж часового інтервалу керування, що і для об'єкта керування. За даними дискретних значень координат х[n] динамічного об'єкта та моделі xм[n] обчислюється відхилення [n] координат об'єкта керування від моделі. В разі виявлення відхилення [n] від встановленої величини * значення [n] перемножують зі значенням поточного керування u[n], величиною та коефіцієнтом підсилення . На наступному кроці обчислюють вектор параметрів [n] моделі із врахуванням її початкового значення [0], який отримується шляхом перерахунку коефіцієнтів с(0) із врахуванням значення періоду дискретизації Т. За параметрами [n] обчислюють нові значення коефіцієнтів сn, для нових коефіцієнтів сn-1 обчислюють значення вирішувальної функції F(cn-1, x(t)), за знаком цієї функції обчислюють сигнал керування без зупинку об'єкта керування. За встановленим сигналом керування динамічна система здійснює рух в напрямку зменшення похибки відпрацювання. Якщо похибка відпрацювання відповідає припустимій, то процес зупиняють. Спосіб настроювання системи адаптивного термінального керування при керуванні динамічним об'єктом реалізується за допомогою пристрою, який містить (див. Фіг.2, Фіг.3), як варіант конструктивного виконання, виконавчу частину 1, що складається з контролера 2, релейного елемента 3, перетворювача вагових коефіцієнтів контролера 4, об'єкта керування 5, вимірювального каналу об'єкта керування 6, що складається з датчика положення 7, датчика швидкості 8, блоку дискретизації сигналів 9, що складається блоку зсуву координат 10, з таймера 14, ключа для сигналу керування 11, ключів для сигналів датчиків 12, 13, блоку дискретної моделі 15, що складається з формувача значень початкових координат моделі 16 та формувачів значень координат положення дискретної моделі 17 та значень координат швидкості 18, блок розрахунку параметрів моделі 19, що складається з обчислювачів відхилень координат положення об'єкта керування від дискретної моделі 20 та швидкості 21, обчислювачів параметрів моделі 22 та 23. Конструктивно вихід контролера 2 зв'язаний зі входом об'єкта керування 5 через релейний елемент 3. Вихід релейного елементу 3 додатково зв'язаний зі входом ключа 11 та входом моделі 17. Вихід об'єкта керування 5 конструктивно зв'язаний зі входами ключів 12, 13 блоку дискретизації 9 че 7 рез датчики положення 7 та швидкості 8. Виходи датчиків положення 7 та швидкості 8 конструктивно зв'язані з сигнальними входами контролера 2 через блок зсуву координат 10. Вихід таймера 14 конструктивно зв'язаний зі входами керування ключів 11, 12, 13. Виходи ключів 12, 13 конструктивно зв'язані зі входами обчислювачів відхилень координат 20, 21, а вихід ключа 11 зв'язаний зі входами обчислювачів параметрів моделі 22, 23. Вихід формувача початкових значень моделі 16 конструктивно зв'язаний зі входами формувачів координат моделі 17, 18, при цьому вихід формувача координат положення 17 конструктивно зв'язаний зі входом формувача координат швидкості моделі 18. Виходи формувачів координат моделі 17, 18 конструктивно зв'язані зі входами обчислювачів параметрів моделі 22, 23 через обчислювачі відхилень 20, 21 блоку розрахунку параметрів моделі 19. Виходи блоків обчислювачів 22, 23 конструктивно зв'язані зі входами формувачів координат моделі 17, 18 відповідно та входами блоку перетворювача вагових коефіцієнтів контролера 4 виконавчого блоку 1 системи. Пристрій, за допомогою якого реалізується спосіб адаптивного керування в системах термінального керування при керуванні динамічним об'єктом, працює таким чином. Перед початком роботи системи керування (див. Фіг.2) для об'єкта, що знаходиться в початковому стані Х(0) встановлюють завдання xз, припустиме значення похибки * відпрацювання завдання та значення координат початкового стану дискретної моделі xм(0). Встановлюють також довільні значення вагових коефіцієнтів контролера с0. Момент часу t подачі команди «Пуск» на систему керування вважають за початковий, тобто t=0. Команда «Пуск» подається також на дискретну модель 15. З моменту t=0 починається розрахунок похибки за положенням та швидкістю динамічного об'єкта за допомогою датчиків 7, 8 і формування значень координат моделі за допомогою формувачів значень координат положення 17 та швидкості дискретної моделі 18. Перед здійсненням обчисленням відхилення координат об'єкта та моделі здійснюється зсув координат об'єкта керування в блоку 10 на величину N. Цей зсув дозволяє виключити вплив неконтрольованих похибок на роботу системи термінального керування. Зсув здійснюється в напрямку протилежному поточним змінам координат об'єкта керування. Далі значення координат об'єкта керування поступають на блоки обчислення відхилення координат об'єкта від відповідних координат моделі 20, 21. Значення координат динамічного об'єкта з виходу блоків 7, 8 поступають також на сигнальні входи контролера 2. Контролер 2 за даними с0 і x(t), x( t ) обчислює значення деякої функції F(c, x(t)), яка в фазовому просторі має назву поверхні перемикань, де X(t) - вектор, компоненти якого складаються з сигналів x(t) і x( t ) . Знак функції F(c, X(t)) буде визначати знак сигналу керування u(f), який формується релейним елементом 3, а саме 54135 8 u( t ) U, якщо F(c, X( t )) U, якщо F(c, X( t )) U( t 0), якщо F(c, X( t )) , , . (1) Мала величина введена в закон управління (1) для виключення похибок округлення та усікання при обчисленні на ЦЕОМ. Релейний елемент комутує напругу величиною +U або -U на вхід динамічного об'єкта 5 за законом (1). В (1) третій вираз в правій частині означає, що значення керуючої дії u(t) зберігається рівним попередньому значенню, навіть якщо фазові координати об'єкта керування знаходяться на лінії перемикання, тобто якщо F(c, (t))=0. Керуюча дія u(t) з моменту t=0 до кінцевого tк примушує об'єкт рухатися в сторону зменшення похибки ( t ) x 3 x( t ). Результати, які представлені на Фіг.4-8, моделювалися для випадку регулятора з двома невідомими параметрами, тобто для вирішувальної функції F(c, X( t )) c1x( t ) c 2x( t ) x( t ) . (2) В (1), (2) використовуються координати, які є зсунутими на величину N за правилом X' ( t ) N, якщо F(c, X' ( t )) , X( t ) X' ( t ) N, якщо F(c, X' ( t )) , (3) де X' ( t ) ( x'1 ( t ), ( x'2 ( t ))T - вектор вимірюваних координат об'єкта керування. При русі динамічного об'єкта результат множення сигналів керування, відхилень координат об'єкту та дискретної моделі з постійним коефіцієнтом з блоків множення 22, 23 як значення нових параметрів подається на входи формувачів 17,18 моделі 15. В разі виявлення відхилень координат моделі та об'єкта керування більших за встановлені порогові значення * обчислювачі 22, 23 здійснюють розрахунок нових параметрів дискретної моделі за правилом n ( n *)u 1 n 1, in 1 (4) де i=1,2. Правило (4) діє кожного разу, коли відхилення координат об'єкта керування та моделі [n] перевищує обрану величину порогу *. Вимір такої величини відхилення здійснюється безперервно протягом відпрацювання завдання шляхом порівняння двох сусідніх малих інтервалів часу (nn n 1 1)T, nТ. Так, якщо корекція i коефіцієнтів за правилом (3) не відбувається, у протилежному випадку завжди відбувається корекція вектора . Після виконування операції (4) отримується вектор , за якими відбувається розрахунок параметрів вектора с c1 1T 1 , c2 2 1 T 1. (5) де 1, 2 - обчислені значення вектору параметрів дискретної моделі за правилом (4). Робота системи закінчується, якщо задовольняється вимога влучення координат * (див. Фіг.7). Типооб'єкту в кінцевий стан 2 1 9 вий характер зміни вагових коефіцієнтів cn в процесі керування показаний на Фіг.8. Результат випробування способу, що заявляється, можна відстежити за Фіг.4-8. В експерименті було задіяно об'єкт керування, для якого функція (2) має параметри сT=(1, 0,5), для порівняння обирався початковий стан з координатами XT(0)=(-5, 0). На Фіг.4 показано, що неконтрольовані похибки вимірювання приводять до хибних спрацьовувань сигналу керування навіть при правильно встановлених значеннях параметрів функції F(c, X(f)), на Фіг.5 представлено результат дії блоку зсуву координат на величину N=0,05, яку було прийнято за випадкову похибку об'єкта керування. З останнього графіку видно, що окрім зменшення кількості перемикань, за рахунок зсуву координат зменшується час відпрацювання завдання приблизно на 30%. В процесі експерименту було встановлено початковий вектор со=(1, 20) невідомих параметрів функції F(c, X(f)), при цьому тривалість перехідного процесу складає T=17,94с. Порогові рівні для відхилення * * координат встановлені Після 1 4N, 2 2N. завершення процесу адаптації з коефіцієнтом підсилення =0,09 отримано квазіоптимальний за швидкодією процес керування (див. Фіг.7) з коефіцієнтами сT=(1,12; 8,93), при цьому тривалість перехідного процесу складає T=11,92с. Порівняння процесу Фіг.7 з графіком процесу на 54135 10 Фіг.6, показує, що виграш в часі відпрацювання завдання при адаптивному настроюванні із зсувом координат складає приблизно 33%. Динаміка зміни коефіцієнтів с в процесі адаптивного настроювання показана на Фіг.8. На відміну від системи керування з [1] в способі, що заявляється, маємо усталений процес керування без введення додаткових елементів стабілізації руху. Підвищення ефективності застосування способу адаптивного керування з настроюваною моделлю в системах термінального керування, який заявляється, у порівнянні з прототипом, полягає в тому, що на відміну від прототипу в способі, що заявляється, дозволяється здійснювати адаптацію в межах одного кроку відпрацювання, а на відміну від аналогу в системі адаптації, що заявляється, отримана система, що має меншу кількість складових елементів на 40%, тобто є більш дешевшою. Джерела інформації: 1. Адаптивные системы идентификации // [Кику А.Г., Костюк В.И., Краскевич В.Е. и др.]; под ред. В.И. Костюка. - К.: Тэхника, 1975. - 288 с. -аналог. 2. Кучеров Д.И. Об одной задаче синтеза адаптивной системы управления, субоптимальной по быстродействию / Д.П. Кучеров // Праці 5-ї Укр. конф. з автомат, керування "Автоматика-98", Київ, 13-16 травня 1998 р. -Ч. І - К.: НТУУ "КПГ, 1998. С.238-244. – найближчий аналог. 11 54135 12 13 54135 14 15 Комп’ютерна верстка А. Крижанівський 54135 Підписне 16 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for adaptive control with an adjusted model tn terminal control systems
Автори англійськоюKucherov Dmytro Pavlovych, Ivanov Borys Pavlovych, Kopylova Zinaida Mykolaivna, Melnyk Oleksandr Dmytrovych, Chikalov Mykola Andriiovych, Kuzmenko Tetiana Petrivna
Назва патенту російськоюСпособ адаптивного управления с настроенной моделью в системах терминального управления
Автори російськоюКучеров Дмитрий Павлович, Иванов Борис Павлович, Копылова Зинаида Николаевна, Мельник Александр Дмитриевич, Чикалов Николай Андреевич, Кузьменко Татьяна Петровна
МПК / Мітки
МПК: G05B 11/00, G05B 13/00
Мітки: системах, моделлю, адаптивного, спосіб, керування, настроюваною, термінального
Код посилання
<a href="https://ua.patents.su/8-54135-sposib-adaptivnogo-keruvannya-z-nastroyuvanoyu-modellyu-v-sistemakh-terminalnogo-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб адаптивного керування з настроюваною моделлю в системах термінального керування</a>
Спосіб адаптивного управління динамічним об’єктом в системах термінального управління
Номер патенту: 51941
Опубліковано: 10.08.2010
Автори: Копилова Зінаїда Миколаївна, Кучеров Дмитро Павлович, Іванов Борис Павлович, Мельник Олександр Дмитрович
МПК: G05B 11/00, G05B 13/00
Мітки: об'єктом, термінального, динамічним, адаптивного, управління, системах, спосіб
Формула / Реферат:
Спосіб адаптивного управління динамічним об'єктом в системах термінального управління, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, вхідні дані про кінцевий та початковий стан об'єкта керування, початкові значення вагових коефіцієнтів контролера, значення початкового керування в системі термінального управління, та в процесі руху вимірюють координати об'єкта...
Спосіб виключення впливу обмежених за амплітудою завад в системах термінального керування
Номер патенту: 90385
Опубліковано: 26.04.2010
Автори: Богучарський В''ячеслав Вікторович, Кучеров Дмитро Павлович, Левицький Ігор Святославович, Кирієнко Володимир Володимирович, Коров'яков Андрій Борисович, Копилова Зінаїда Миколаївна
МПК: G05B 13/00, G05B 11/00
Мітки: термінального, керування, системах, амплітудою, обмежених, впливу, виключення, спосіб, завад
Формула / Реферат:
Спосіб виключення обмежених за амплітудою сигналів завад в системах термінального керування, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, значення вагових коефіцієнтів контролера, початковий сигнал керування в системі термінального керування, та в процесі руху вимірюють координати об'єкта керування, відхилення поточного стану...
Спосіб двоканального адаптивного автоматичного керування процесами вуглезбагачення
Номер патенту: 3708
Опубліковано: 15.12.2004
Автори: Ульшин Віталій Олександрович, Килимник Олег Вікторович, Зубов Дмитро Анатолійович
МПК: B03B 13/00
Мітки: керування, адаптивного, вуглезбагачення, двоканального, спосіб, процесами, автоматичного
Формула / Реферат:
Спосіб двоканального адаптивного автоматичного керування процесами вуглезбагачення, який полягає у тому, що зольність концентрату автоматично стабілізують шляхом подачі відповідних керуючих впливів, оптимальні значення яких обчислюють на базі аналізу прогнозованих станів процесів вуглезбагачення, які представляють як двоканальні, нестаціонарні, стохастичні об'єкти керування з різнотемповими каналами і великим запізнюванням, який відрізняється...
Пристрій для адаптивного керування процесом металообробки
Номер патенту: 35845
Опубліковано: 16.04.2001
Автор: Коцюбинський Віктор Семенович
МПК: G05B 13/02
Мітки: керування, процесом, пристрій, металообробки, адаптивного
Формула / Реферат:
Пристрій для адаптивного керування процесом металообробки, до складу якого входить блок завдання, вихід якого з'єднаний з першим входом суматора , вихід суматора з'єднаний зі входом електроприводу подачі, підключеного виходом зі входом датчика швидкості подачі, і зі входом редуктора приводу подачі, вихід редуктора з'єднаний із верстатом, який містить електродвигун приводе шпинделя верстати, який містить датчик потужності, вихід якого...
Спосіб керування об’єктами в дорожніх інформаційних системах з використанням супутникових електронних карт
Номер патенту: 47692
Опубліковано: 25.02.2010
Автор: Щуренко Юрій Олександрович
МПК: G08G 1/01
Мітки: супутникових, використанням, інформаційних, карт, електронних, керування, спосіб, об'єктами, системах, дорожніх
Формула / Реферат:
Спосіб керування об'єктами в дорожніх інформаційних системах з використанням супутникових електронних карт, який включає накопичення інформації про стан об'єктів в базі даних, розрахунок програмної бази даних параметрів оптимальних режимів роботи об'єктів на подальший час і передачу об'єктам цих параметрів для виконання при використанні унікальних для кожного об'єкта піктограм, розміщених на електронних схемах автоматизованих робочих місць,...
Попередній патент: Перемішуючий пристрій
Наступний патент: Регульований напрямний ролик
Випадковий патент: Спосіб зсуву фази сигналу