Спосіб виключення впливу обмежених за амплітудою завад в системах термінального керування
Номер патенту: 90385
Опубліковано: 26.04.2010
Автори: Копилова Зінаїда Миколаївна, Левицький Ігор Святославович, Богучарський В''ячеслав Вікторович, Кучеров Дмитро Павлович, Кирієнко Володимир Володимирович, Коров'яков Андрій Борисович

Формула / Реферат
Спосіб виключення обмежених за амплітудою сигналів завад в системах термінального керування, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, значення вагових коефіцієнтів контролера, початковий сигнал керування в системі термінального керування, та в процесі руху вимірюють координати об'єкта керування, відхилення поточного стану об'єкта керування від кінцевого, який відрізняється тим, що для визначених координат встановлюють необхідне число змін знака керування для досягнення кінцевого стану об'єкта керування, здійснюють підрахунок числа змін знака сигналу керування на протилежний, визначають ознаки інтервалу керування "парність - непарність" та знак поточного сигналу керування, при цьому для непарного числа перемикань і сигналу керування негативного знака в системі здійснюють зсув усіх координат динамічного об'єкта в напрямку збільшення поточних значень координат динамічного об'єкта на певну постійну величину; у випадку парного числа перемикань і при позитивному знаку сигналу керування здійснюють зсув координат об'єкта в напрямку зменшення поточних значень координат динамічного об'єкта на певну постійну величину; при непарному числі змін знака керування і позитивному знаку сигналу керування в системі здійснюють зсув усіх координат динамічного об'єкта в напрямку зменшення поточних значень координат динамічного об'єкта на певну постійну величину; у випадку парного числа перемикань і при негативному знаку сигналу керування здійснюють зсув координат об'єкта в напрямку збільшення поточних значень координат об'єкта керування на певну постійну величину; за новими координатами обчислюють значення визначеної функції, за знаком якої вибирають знак сигналу керування в системі; новий сигнал керування відповідної величини та знака подають на вхід об'єкта керування.
Текст
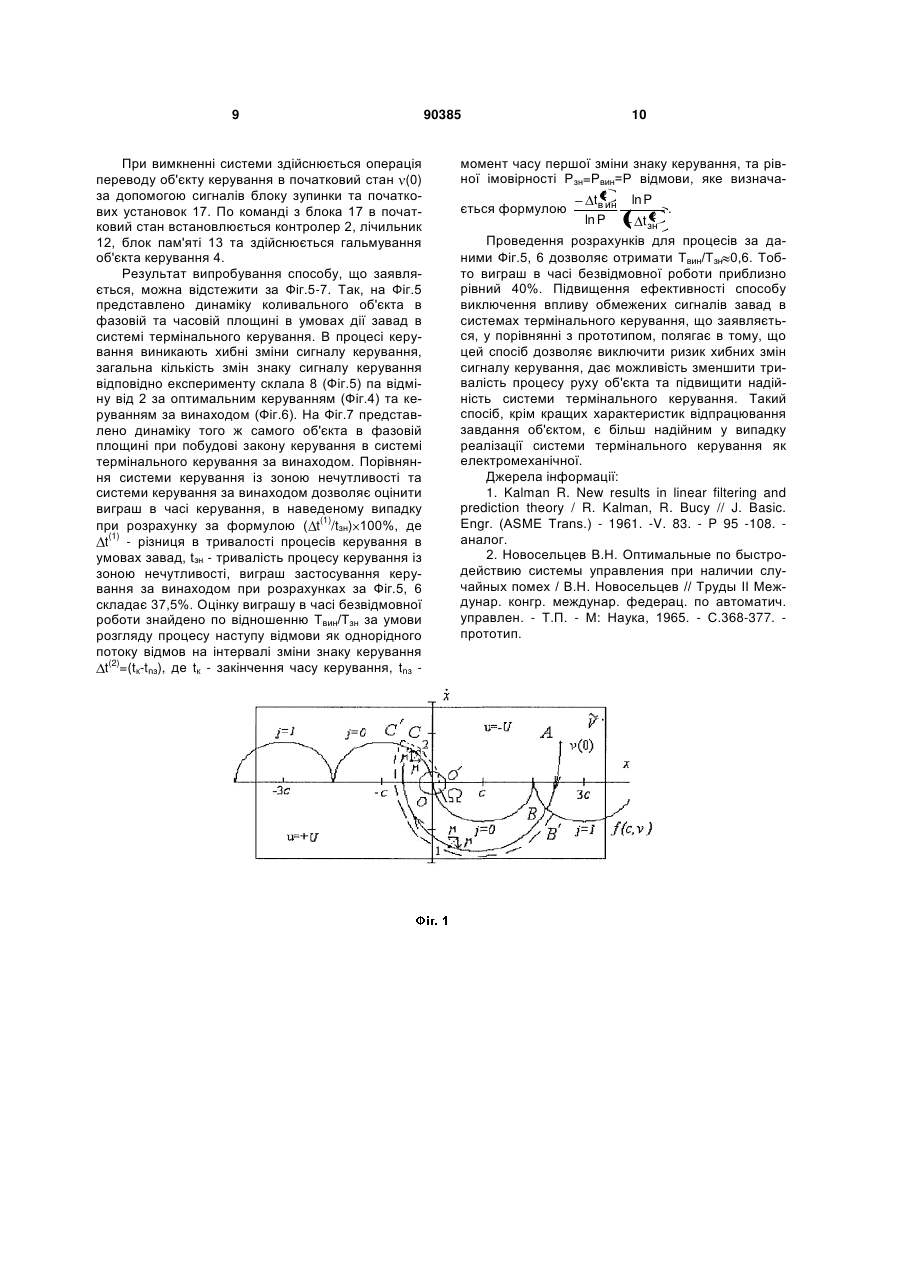
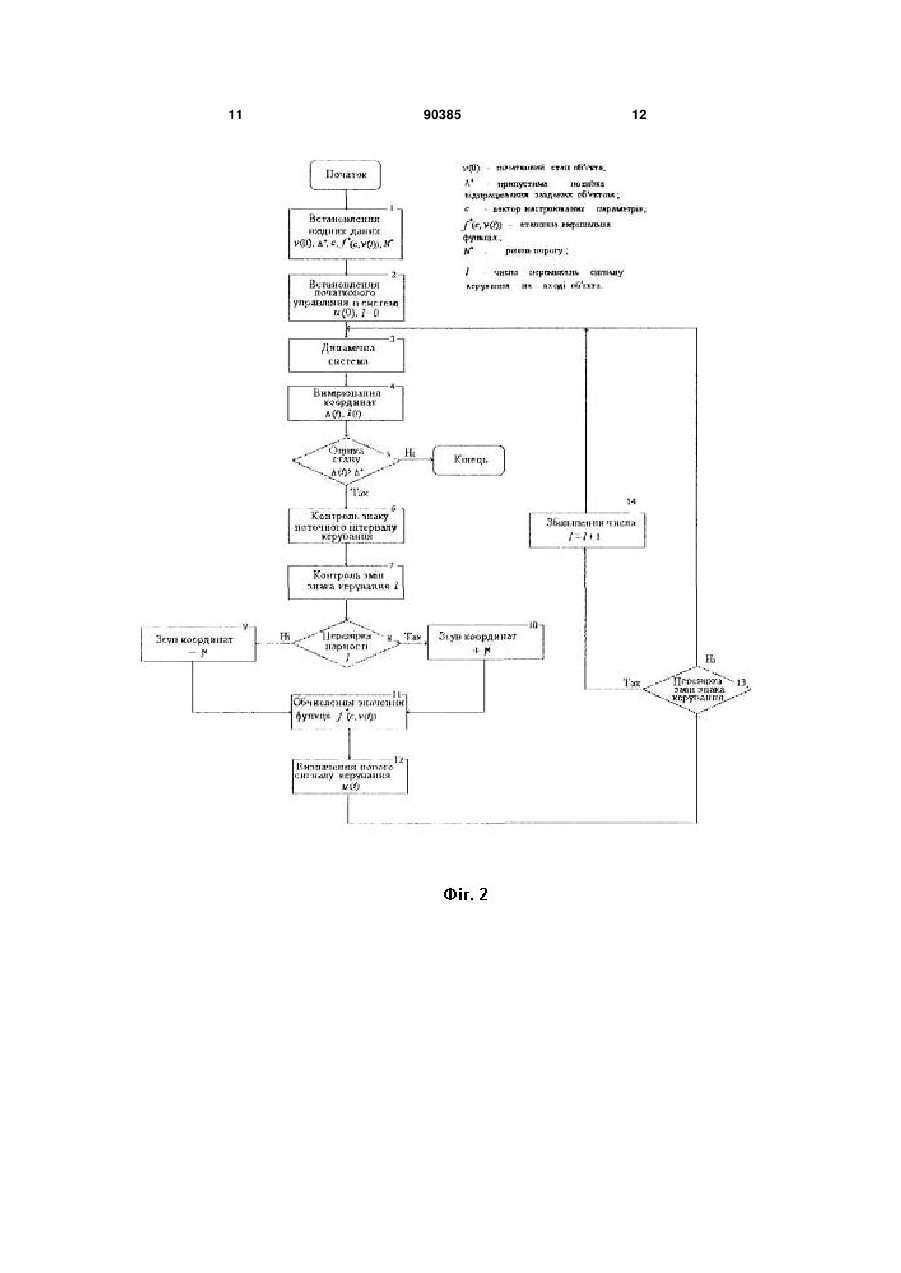
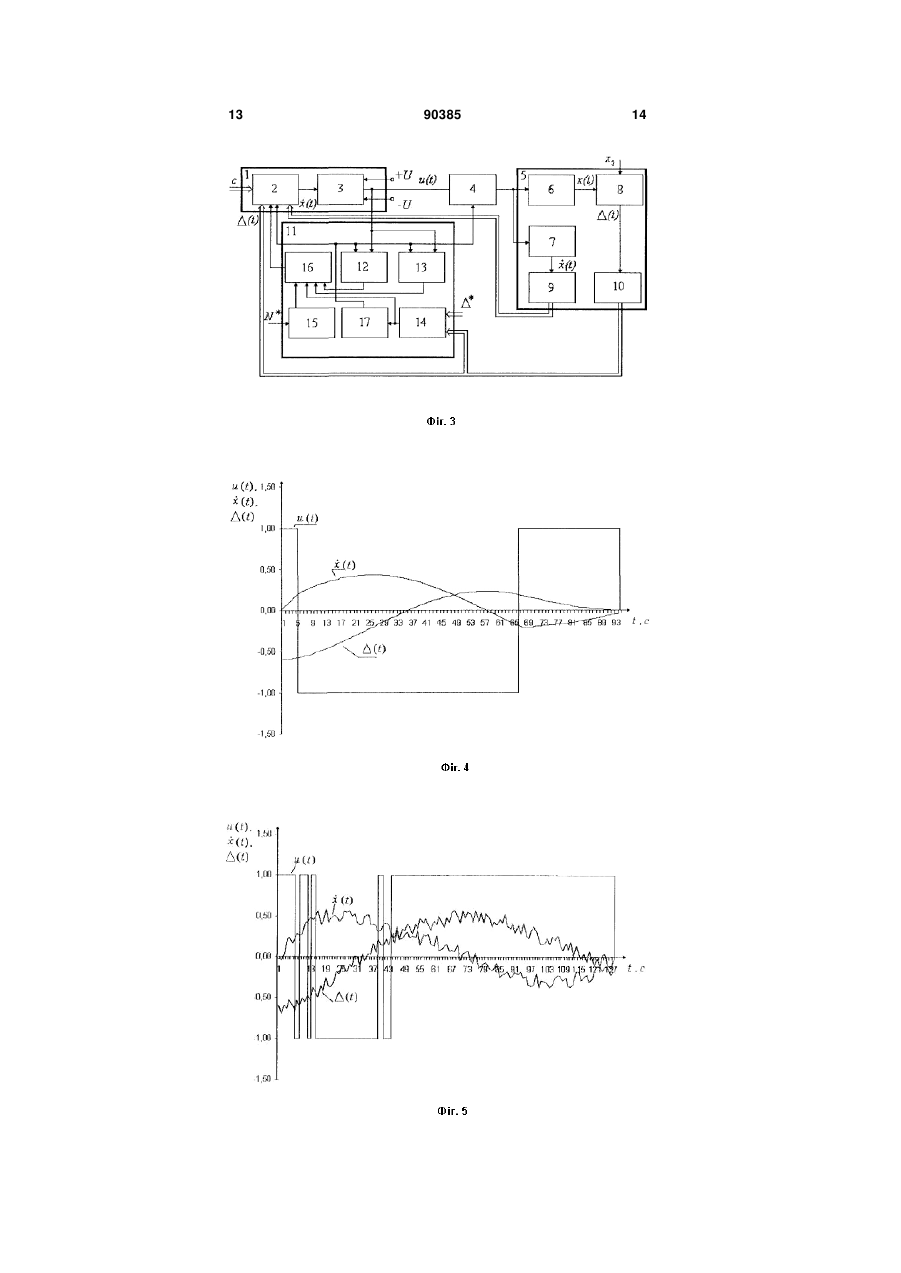
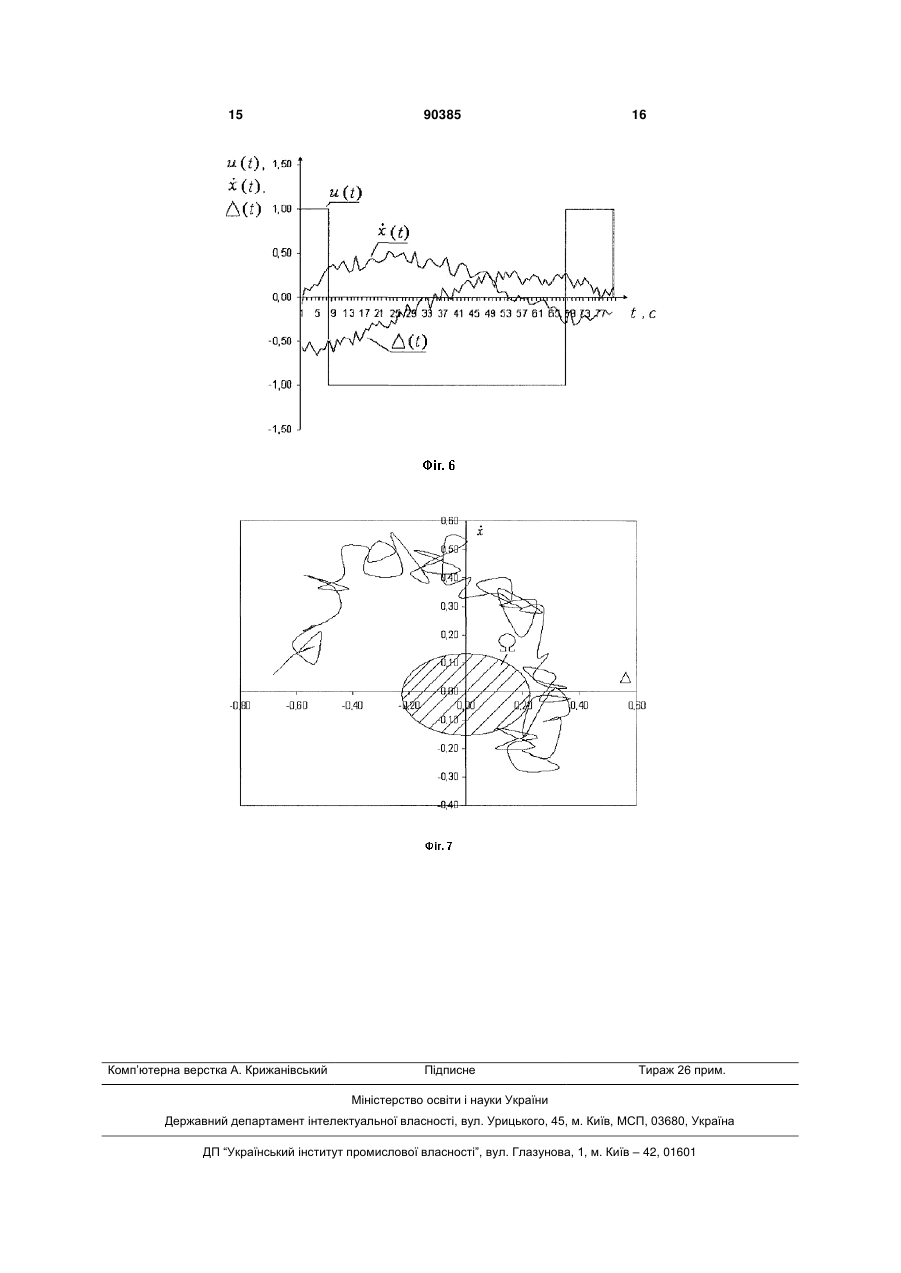
Спосіб виключення обмежених за амплітудою сигналів завад в системах термінального керування, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, значення вагових коефіцієнтів контролера, початковий сигнал керування в системі термінального керування, та в процесі руху вимірюють координати об'єкта керування, відхилення поточного стану об'єкта керування від C2 2 (11) 1 3 простішій технічній реалізації динамічна система має кращу точність. Такі системи до свого складу включають інформаційну та керуючу частину. Інформаційна частина збирає дані про динаміку системи за показаннями датчиків, що характеризують стан об'єкта керування, та перетворює дані датчиків в сигнали зручного виду. Керуюча частина за допомогою пристроїв логіки та виконавчих елементів використовує сигнали з датчиків так, щоб досягти заданого термінального (кінцевого) стану. Рух об'єкта керування до кінцевого стану здійснюється в умовах впливу зовнішнього середовища, що змінює характер процесу керування. Викликані похибки пов'язані з дією сигналів, які мають природне походження та називаються завадами або збуреннями. Завдання системи термінального керування - мінімізувати вплив зовнішніх збурень на процес керування, який визначається дією корисних сигналів. Відомі способи зменшення впливу завад на процес керування засновані на наявних відмінностях корисного та завадового сигналів. Деякі параметри корисного сигналу та сигналу збурення мають різні значення, що дає можливість розрізнювати ці сигнали. Доцільність використання того чи іншого способу виключення впливу завад визначається наявними відомостями про параметри завади та корисного сигналу. Наприклад, якщо корисний сигнал та завадовий відрізняються за частотою, то використовуються так звані фільтрові методи; якщо корисний сигнал та сигнал завади відрізняються за тривалістю, то використовуються засоби бланкування (запирання) спільного тракту корисного сигналу і сигналу завади на час дії завади; якщо корисний і завадовий сигнал відрізняються за амплітудою (рівнем), то використовуються порогові пристрої. В останній час в системах керування поширено використання засобів, які враховують різні статистичні властивості сигналів, до яких відносяться закон розподілу з параметрами математичного очікування та середньоквадратичного відхилення. Відомий спосіб виключення впливу завад на систему термінального керування реалізовують в пристроях, де оцінку вихідного сигналу здійснюють фільтром Калмана, який полягає втому, що пристрій оцінювання підключають до виходу об'єкта керування для отримання оцінок вихідних величин. За відсутністю даних про завади стає необхідним проведення попереднього настроювання фільтра [1]. До недоліків такого способу виключення впливу завад належить необхідність наявності інформації про статистичні властивості сигналу завади, відсутність якої компенсується її вивченням та відповідним настроюванням фільтра, що потребує витрат часу для підстроювання фільтра під характеристики сигналу завади. Таким чином, ефективність фільтра Кал мана характеризується точністю та часом настроювання. В умовах відсутності інформації про параметри сигналу завади час настроювання збільшується. Може статися і так, що серед наявної інформації про завади відомим є тільки одним параметр – максимальна припустима 90385 4 амплітуда завади, тоді застосування фільтра Калмана є недоцільним. Найбільш близьким способом, обраним за прототип, є спосіб виключення впливу завад, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, значення вагових коефіцієнтів контролера, початкове керування в системі термінального керування; в процесі руху вимірюють координати об'єкта керування, відхилення поточного стану об'єкта керування від кінцевого та вводять в закон керування зону нечутливості, розмір якої встановлюють за допомогою порогового пристрою [2]. Недоліком способу виключення впливу завад, який обраний за прототип, є наявність хибних змін сигналу керування. Цей недолік є важливим тому, що зміна знаку керування приводить до затягування часу відпрацювання завдання та зменшенню надійності роботи системи при реалізації її як електромеханічної. В основу способу виключення впливу обмежених сигналів завади для систем термінального керування за винаходом покладено завдання шляхом усунення недоліків прототипу забезпечити виключення ризику хибних змін сигналу керування за рахунок введення в систему пристрою зі спеціальною логікою, за якою здійснюється зсув координат об'єкта для подальшого використання їх в законі керування, за рахунок цього зменшити час відпрацювання завдання та підвищити надійність функціонування системи. Суть способу виключення сигналів завад обмежених за амплітудою в системах термінального керування, за яким в системі керування встановлюють вхідні дані, які включають бажану похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта, значення вагових коефіцієнтів контролера, початковий сигнал керування в системі та в процесі руху об'єкта вимірюють координати об'єкта керування, визначають чи досягнув об'єкт кінцевого стану, полягає в тому, що встановлюють необхідне число змін знаку сигналу керування для досягнення кінцевого стану, здійснюють рахунок числа змін знака сигналу керування на протилежний і визначаються ознаки інтервалу керування на "парність – непарність" та знак поточного сигналу керування, при цьому в разі, коли об'єкт не досягнув кінцевого стану, то для непарного числа перемикань і сигналу керування негативного знаку в системі здійснюють зсув усіх координат об'єкта в напряму збільшення поточних значень координат об'єкта; у випадку парного числа перемикань і позитивному знаку сигналу керування здійснюють зсув координат об'єкта в напряму зменшення поточних значень координат об'єкта керування; при непарному числі змін знака керування і позитивному знаку сигналу керування в системі здійснюють зсув усіх координат об'єкта в напряму зменшення поточних значень координат об'єкта керування; у випадку парного числа перемикань і негативному знаку сигналу керування, здійснюють зсув координат об'єкта в напряму збільшення поточних значень координат об'єкта ке 5 рування; за новими координатами обчислюють значення вирішувальної функції; за знаком цієї функції обирають знак сигналу керування в системі; у випадку зміни знаку керування на протилежний змінюють і значення лічильника числа змін знака сигналу керування; новий сигнал керування відповідної величини та знаку подають на вхід об'єкта керування; якщо похибка системи досягає бажаного значення, процес керування в системі завершують. Порівняльний аналіз способу, який заявляється із прототипом дозволяє дійти висновку, що спосіб виключення впливу обмежених за амплітудою завад при термінальному керуванні об'єктом керування відрізняється тим, що при встановленні вхідних даних в системі керування вводиться необхідне число змін знаку сигналу керування, запам'ятовується знак поточного керування в системі та додатково обчислюється кількість змін знаку сигналу керування та визначаються ознаки інтервалу "парність-непарність" інтервалу керування, при обчисленні нового сигналу керування в системі термінального керування при кожному парному числі змін знаку керування та позитивному знаку керування від кожної координати об'єкта керування віднімається постійна величина; при непарному числі змін знаку та позитивному знаку керування віднімається постійна величина; при парному числі змін знаку та негативному знаку керування додається постійна величина, а при непарному числі змін знаку та негативному знаку керування додається постійна величина, що рівна величині максимальної амплітуди завади. На заключній стадії формування поточного сигналу керування використовуються нові координати динамічного об'єкта при обчисленні вирішувальної функції. Таким чином, спосіб виключення завад обмежених за рівнем в системах керування, який заявляється, відповідає критерію винаходу "новизна". Суть способу пояснюється за допомогою ілюстрацій, на Фіг.1 показано принцип виключення впливу обмежених завад, на Фіг.2 показано послідовність дій виконання способу, що заявляється, на Фіг.3 приведено структурну схему пристрою, що реалізує спосіб, який заявляється, на Фіг.4 приведено динаміку об'єкта керування за відсутністю завад в системі за умови вимірювання координат і сигналу керування у часовій площині, на Фіг.5 показано динаміку того ж об'єкту при "хибних" змінах сигналу керування в часовій площині, на Фіг.6 показано вплив способу в системі термінального керування при формуванні керування за винаходом в часовій площині, на Фіг.7 показано динаміку об'єкта керування при виключенні завад за винаходом в площині положення-швидкість. Принцип виключення впливу обмежених завад в системах термінального керування показано на Фіг.1. Зображувальна точка об'єкта керування в фазовій площині (х, x ) в початковому стані знаходиться в точці (0). Оптимальна за часом траєкторія в цій площині пролягає за лінією АВСО. Зміна знаку керуючої дії здійснюється на лінії f (с, ), яка являє собою послідовність напівкіл, одна частина яких знаходиться нижче осі х, інша частина знахо 90385 6 диться вище осі х. Обидві частини розділені віссю x . При цьому на ділянці АВ (нульовий інтервал керування) сигнал керування має негативний знак – U, на ділянці ВС (перший інтервал керування) сигнал керування має протилежний знак +U та на кінцевій ділянці СО (другий інтервал керування) сигнал керування знову має негативний знак - U. результат дії завад показаний в точках 1, 2 фіг. 1. В точці 1 дія сигналу завади на ділянці ВС приводить до зміни знаку сигналу керування з +U на -U, що є небажаним. Для виключення дії завади на першому інтервалі керування від координат об'єк та х, x віднімається постійна величина . Це приводить до отримання нових координат зображувальної точки об'єкта керування, за якими формується сигнал керування знаку +U, як і повинно бути при знаходженні зображувальної точки в області керувань +U. В точці 2 показано інший випадок, коли зображувальна точка знаходиться на другому інтервалі керування та дія сигналу завади теж приводить до хибної зміни знаку керу вання. В цьому випадку до кожної координати х, x об'єкту керування додається постійна величина . Спосіб формує в площині х, x нову траєкторію руху зображувальної точки ABB'С'О'. На Фіг.1 символом позначено область досягнення зображувальної точки. Послідовність виконання дій в способі впливу виключення обмежених завад на систему термінальною керування для об'єкта керування пояснюється схемою на Фіг.2, де показано, що перед початком функціонування в системі термінального керування встановлюють вхідні дані, які складаються з бажаної похибки відпрацювання завдання об'єктом керування, початкового стану об'єкта керування, рівня обмеження завад, еталонної функції, яка обчислюється контролером, необхідного числа змін знаку сигналу керування. Далі, визначається сигнал керування певного знаку в системі, який подається на вхід об'єкта для початку руху. Рух об'єкта контролюють за допомогою вимірювання координат та постійного обчислення відхилення поточного стану об'єкту від кінцевого (похибка відпрацювання). Контролюють також номер інтервалу керування на парність - непарність та поточний знак сигналу керування. Якщо об'єкт не досяг кінцевого стану, то у випадку признаку "парності-непарності" інтервалу і певного знаку поточного керування здійснюють зсув усіх координат, що характеризують стан об'єкту керування, шляхом додавання або віднімання постійної величини від усіх координат об'єкта. На заключній стадії за новими координатами визначається функція f. Далі за знаком функції f обирається знак сигналу керування, під дією якого подальший рух об'єкта керування здійснюється в напряму зменшення похибки керування. Спосіб виключення завад в системі термінального керування об'єктом керування реалізують за допомогою пристрою, який містить (див. Фіг.3), як варіант конструктивного виконання, виконавчу частину 1, що складається з контролера 2, релейного елемента 3, об'єкта керування 4, вимірювальної частини 5, що складається з датчика поло 7 90385 ження 6, датчика швидкості 7, обчислювача похибки 8, кодуючих блоків 9, 10, пристрою логіки 11, що складається із лічильника числа перемикань 12, блоку пам'яті знаку поточного керування 13, компаратора похибки 14, блоку встановлення рівня порогу 15, блоку логіки 16, також до складу системи термінального керування може бути включено блок зупинки та початкових установок 17. Конструктивно вихід контролера 2 зв'язаний зі входом динамічного об'єкта керування 4 через релейний елемент 3. Вихід об'єкта керування 4 конструктивно зв'язаний зі входами датчиків положення 6 та швидкості 7. Вихід датчику положення 6 зв'язаний з сигнальними входами (t) контролера 2 через обчислювач похибки 8 та кодуючий блок 10, а вихід датчика швидкості 7 з сигнальни ми входами x (t) контролера 2 через кодуючий блок 9. Для реалізації способу виключення впливу обмежених завад на процес керування об'єктом пристрій додатково містить лічильник числа змін знаку керування 12, вхід якого зв'язаний з виходом релейного елементу 3, а вихід з блоком логіки 16. Вихід релейного елемента 3 зв'язаний зі входом блоку пам'яті знаку поточного керування 13, вихід, якого зв'язаний із блоком логіки 16. Компаратор похибки 14, інформаційний вхід, якого зв'язаний із виходом блоку 10, а вихід з блоком логіки 16. Вихід блоку логіки 16, зв'язаний зі входами керування контролера 2. Пристрій, як варіант конструктивного виконання, може додатково містити блок зупинки та початкових установок 17, вхід якого зв'язаний з виходом компаратора похибки 14, а вихід 17 підключений до входу початкового встановлення контролера 2, лічильника числа змін знаку керування 12, блоку пам'яті поточного керування 13 та об'єкта керування 4. Пристрій, за допомогою якого реалізується спосіб впливу обмежених завад в системі термінального керування для динамічних об'єктів, працює таким чином. Перед початком роботи системи керування (див. Фіг.3) встановлюють бажане значення похибки *, точне значення рівня порогу N*, число змін знаку керування в системі l. Встановлюють також необхідні значення вагових коефіцієнтів с контролера. Вважається, що об'єкт знаходиться в початковому стані х(0). На вхід системи подають завдання хз, для відпрацювання. Момент часу t подачі завдання на систему керування вважають за початковий, тобто t=0. З цього моменту здійснюють розрахунок похибки і швидкості відпрацювання за допомогою датчиків положення 6, швидкості 7 та обчислювача похибки 8. їх значення поступають на кодуючі блоки 9, 10, які перетворюють поточні значення похибки положення та швидкості об'єкта керування в цифровий код. Цей 8 код поступає на інформаційні входи (t) і x (t) контролера 2, який за даними коефіцієнтів с і даними виміру (t), x (t) обчислює значення деякої функції f (с, (t)). Ця функція в фазовому просторі має назву поверхні перемикань, де (t) - вектор, компоненти якого складаються з цифрового коду сигна лів (t)=xз(t)-x(t) i x (t). Знак функції f(с, (t)) буде визначати знак сигналу керування u(t), який формує релейний елемент 3, а саме U, якщо f c, t , ut U, якщо f c, t . (1) У випадках, коли рух об'єкта керування здійснюється вздовж поверхні перемикань, при цьому зображувана точка знаходиться в околиці функції f(.), тоді знак сигналу керування визначається знаком сигналу датчика швидкості 7 так U, якщо f t , c , x 0, ut U, якщо f t , c , x 0. (2) Величина в (1), (2) вводиться з метою виключення впливу похибок округлення та усікання при проведенні розрахунків за допомогою контролера, в якому число представляється обмеженою кількісно розрядів. З виходу релейного елементу напруга величиною +U або –U подається на вхід об'єкта керування 4 за законами (1), (2). Керуюча дія u(t) примушує об'єкт рухатися в сторону зменшення похибки (t). Відсутність зони нечутливості або встановлення тільки зони нечутливості визиває хибні зміни сигналу керування (див. Фіг.5). Виключення хибних змін знаку керування здійснюється блоком логіки 16 та контролеру 2 (Фіг.3). При цьому блок логіки 16 обирає знак поправки, а контролер 2 здійснює зсув вимірюваних координат об'єкта керування 4 за допомогою арифметичних операцій додавання та віднімання. За ознаками "парності-непарності" інтервалу керування, номер якого поступає з блоку 12, та знаку поточного керування в системі термінального керування з блоку 13 до блоку логіки 16 подається сигнал, за яким в контролері 2 визначається напрям зсуву поточних координат об'єкту керування. При цьому в контролері 2 використовуються інші, нові координати стану об'єкта керування, а саме (t)= o(t)+ , (3) де o(t) - поточні координати об'єкта керування. Знак постійної величини , зсуву координат об'єкта керування 4 визначається логікою роботи блока 16, яку можна зрозуміти з таблиці 1. Таблиця 1 Логіка визначення зсуву поточних координат Парний інтервал та Непарний інтервал Парний інтервал та Непарний інтервал Ситуація керування негативний знак сиг- та негативний знак позитивний знак сиг- та позитивний знак налу керування сигналу керування налу керування сигналу керування Значення + 9 При вимкненні системи здійснюється операція переводу об'єкту керування в початковий стан (0) за допомогою сигналів блоку зупинки та початкових установок 17. По команді з блока 17 в початковий стан встановлюється контролер 2, лічильник 12, блок пам'яті 13 та здійснюється гальмування об'єкта керування 4. Результат випробування способу, що заявляється, можна відстежити за Фіг.5-7. Tак, на Фіг.5 представлено динаміку коливального об'єкта в фазовій та часовій площині в умовах дії завад в системі термінального керування. В процесі керування виникають хибні зміни сигналу керування, загальна кількість змін знаку сигналу керування відповідно експерименту склала 8 (Фіг.5) па відміну від 2 за оптимальним керуванням (Фіг.4) та керуванням за винаходом (Фіг.6). На Фіг.7 представлено динаміку того ж самого об'єкта в фазовій площині при побудові закону керування в системі термінального керування за винаходом. Порівняння системи керування із зоною нечутливості та системи керування за винаходом дозволяє оцінити виграш в часі керування, в наведеному випадку при розрахунку за формулою ( t(1)/tзн) 100%, де t(1) - різниця в тривалості процесів керування в умовах завад, tзн - тривалість процесу керування із зоною нечутливості, виграш застосування керування за винаходом при розрахунках за Фіг.5, 6 складає 37,5%. Оцінку виграшу в часі безвідмовної роботи знайдено по відношенню Твин/Тзн за умови розгляду процесу наступу відмови як однорідного потоку відмов на інтервалі зміни знаку керування t(2)=(tк-tnз), де tк - закінчення часу керування, tnз 90385 10 момент часу першої зміни знаку керування, та рівної імовірності Рзн=Рвин=Р відмови, яке визначається формулою tв2ин ln P ln P . 2 t зн Проведення розрахунків для процесів за даними Фіг.5, 6 дозволяє отримати Твин/Тзн 0,6. Тобто виграш в часі безвідмовної роботи приблизно рівний 40%. Підвищення ефективності способу виключення впливу обмежених сигналів завад в системах термінального керування, що заявляється, у порівнянні з прототипом, полягає в тому, що цей спосіб дозволяє виключити ризик хибних змін сигналу керування, дає можливість зменшити тривалість процесу руху об'єкта та підвищити надійність системи термінального керування. Такий спосіб, крім кращих характеристик відпрацювання завдання об'єктом, є більш надійним у випадку реалізації системи термінального керування як електромеханічної. Джерела інформації: 1. Kalman R. New results in linear filtering and prediction theory / R. Kalman, R. Bucy // J. Basic. Еngr. (ASME Trans.) - 1961. -V. 83. - P 95 -108. аналог. 2. Новосельцев В.Н. Оптимальные по быстродействию системы управления при наличии случайных помех / В.Н. Новосельцев // Труды II Междунар. конгр. междунар. федерац. по автоматич. управлен. - Т.П. - М: Наука, 1965. - С.368-377. прототип. 11 90385 12 13 90385 14 15 Комп’ютерна верстка А. Крижанівський 90385 Підписне 16 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюShutting-off method for effect of amplitude-limited interfering signal in terminal control systems
Автори англійськоюKucherov Dmytro Pavlovych, Bohucharskyi Viacheslav Viktorovych, Kyriienko Volodymyr Volodymyrovych, Kopylova Zinaida Mykolaivna, Koroviakov Andrii Borysovych, Levytskyi Ihor Sviatoslavovych
Назва патенту російськоюСпособ выключения влияния ограниченных по амплитуде помех в системах терминального управления
Автори російськоюКучеров Дмитрий Павлович, Богучарский Вячеслав Викторович, Кириенко Владимир Владимирович, Копилова Зинаида Николаевна, Коровьяков Андрей Борисович, Левицкий Игорь Святославович
МПК / Мітки
МПК: G05B 11/00, G05B 13/00
Мітки: впливу, спосіб, керування, виключення, завад, обмежених, системах, амплітудою, термінального
Код посилання
<a href="https://ua.patents.su/8-90385-sposib-viklyuchennya-vplivu-obmezhenikh-za-amplitudoyu-zavad-v-sistemakh-terminalnogo-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб виключення впливу обмежених за амплітудою завад в системах термінального керування</a>
Спосіб виключення впливу вищих гармонійних складових на мережу живлення
Номер патенту: 23356
Опубліковано: 31.08.1998
Автори: Назаренко Володимир Михайлович, Удовенко Валерій Олександрович
МПК: H02J 1/02
Мітки: впливу, виключення, складових, гармонійних, спосіб, живлення, вищих, мережу
Формула / Реферат:
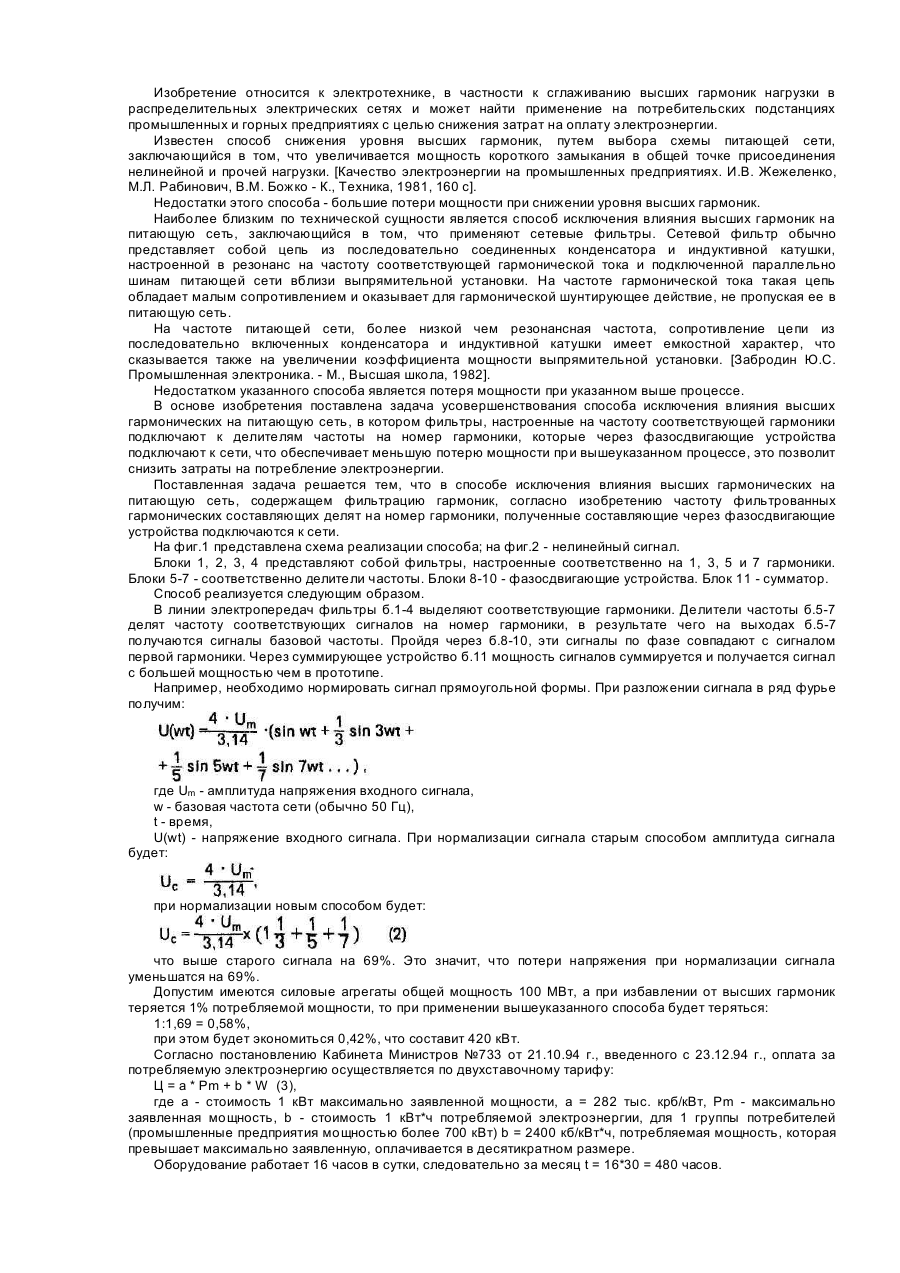
Способ исключения влияния высших гармонических составляющих на питающую сеть, содержащий отвод и фильтрацию гармоник, отличающийся тем, что частоту отфильтрованных гармонических составляющих делят на номер гармоник, полученные составляющие через фазосдвигающие устройства подводят к сети.
Спосіб здійснення інформаційної взаємодії в інформаційних системах моніторингу та керування дорожнім рухом
Номер патенту: 42748
Опубліковано: 27.07.2009
Автор: Щуренко Юрій Олександрович
МПК: G08G 1/01
Мітки: моніторингу, керування, здійснення, рухом, спосіб, взаємодії, інформаційних, дорожнім, інформаційної, системах
Формула / Реферат:
1. Спосіб здійснення інформаційної взаємодії в інформаційних системах моніторингу та керування дорожнім рухом, що включає передачу керуючих команд з боку центру керування на периферійні пристрої і отримання центром керування від периферійних пристроїв інформації про їх технічний стан при використанні технології "клієнт-сервер", який відрізняється тим, що вищенаведені керуючі команди та інформація про технічний стан передаються в...
Прилад для визначення координат постановників завад, працюючих на земній поверхні
Номер патенту: 61209
Опубліковано: 17.11.2003
Автори: Шпаківський Юрій Олександрович, Куровська Тетяна Юріївна, Зайківський Олександр Болеславович, Слепов Лев Іванович, Микитюк Олександр Григорович
Мітки: постановників, завад, координат, прилад, земній, визначення, працюючих, поверхні
Формула / Реферат:
Прилад для визначення координат постановників завад, які працюють на земній поверхні, що містить антенну систему, вхідний контур, підсилювач високої частоти, детектор, підсилювач низької частоти і динамік, який відрізняється тим, що він додатково містить канал виміру дальності, який має випрямляч інформаційного сигналу, прилад лінеаризації залежності комутатор чутливості...
Пристрій електроживлення трифазних споживачів в автономних системах з компенсацією впливу несиметрії мережі на навантаження
Номер патенту: 52922
Опубліковано: 15.01.2003
Автори: Терещенко Тетяна Олександрівна, Жуйков Валерій Якович, Петергеря Юлія Сергіївна, Соболєв Олександр Володимирович
МПК: H02J 3/26
Мітки: електроживлення, мережі, системах, автономних, трифазних, несиметрії, компенсацією, впливу, пристрій, навантаження, споживачів
Формула / Реферат:
Пристрій електроживлення трифазних споживачів в автономних системах з компенсацією впливу несиметрії мережі на навантаження, що містить інвертор, вхідні виводи якого підключені до джерела постійної напруги, керуючі виводи приєднані до системи керування з широтно-імпульсною модуляцією (ШІМ), першу, другу, третю індуктивності, які підключені виводами до відповідних фаз мережі живлення А, В, С, і до фаз навантаження а, b, с, який відрізняється...
Пристрій електроживлення трифазних споживачів в автономних системах з компенсацією впливу несиметрії мережі на навантаження
Номер патенту: 50192
Опубліковано: 15.10.2002
Автори: Петергеря Юлія Сергіївна, Соболєв Олександр Володимирович, Терещенко Тетяна Олександрівна, Жуйков Валерій Якович
МПК: H02J 3/26
Мітки: мережі, пристрій, споживачів, компенсацією, впливу, трифазних, несиметрії, системах, електроживлення, автономних, навантаження
Формула / Реферат:
Пристрій електроживлення трифазних споживачів в автономних системах з компенсацією впливу несиметрії мережі на навантаження, що містить інвертор, вхідні виводи якого підключені до джерела постійної напруги, керуючі виводи приєднані до системи керування з широтно-імпульсною модуляцією (ШІМ), до трьох вихідних виводів інвертора приєднані перша, друга, третя індуктивності, які підключені другими виводами до відповідних фаз мережі живлення А, В,...
Попередній патент: Пристрій для заміни і транспортування прокатних валків
Наступний патент: Спосіб подачі яєць до яйцебійної машини та яйцебійна машина
Випадковий патент: Пристрій для боротьби з ураганами