Ігровий симулятор транспортного засобу на двоступеневій рухомій платформі
Формула / Реферат
Ігровий симулятор транспортного засобу на двоступеневій рухомій платформі, який містить основу, розміщену на ній рухому платформу, силовий привід переміщення рухомої платформи, встановлені на рухомій платформі сидіння, кермо, важіль коробки передач, педальний блок, блок включення/виключення рухомої платформи та монітор, блок розміщення елементів керування приводами та персонального комп'ютера з програмним забезпеченням, який електромережею з'єднаний з силовим приводом переміщення рухомої платформи, який відрізняється тим, що рухома платформа з'єднана з основою в конструкційній точці опори за допомогою шарнірного кардана, а силовий привід переміщення рухомої платформи містить два симетрично встановлених незалежні приводи, кожен з яких містить кроковий електродвигун, вихідний вал якого з'єднаний з вхідним валом жорстко встановленого на основі понижувального черв'ячного редуктора, на вихідному валу якого встановлений шатун, який з'єднаний з шарнірним вузлом, який з'єднаний з одним кінцем тяги, другий кінець якої з'єднаний з встановленим на рухомій платформі другим шарнірним вузлом, при цьому на вихідному валу кожного понижувального черв'ячного редуктора встановлений абсолютний давач кута повороту.
Текст
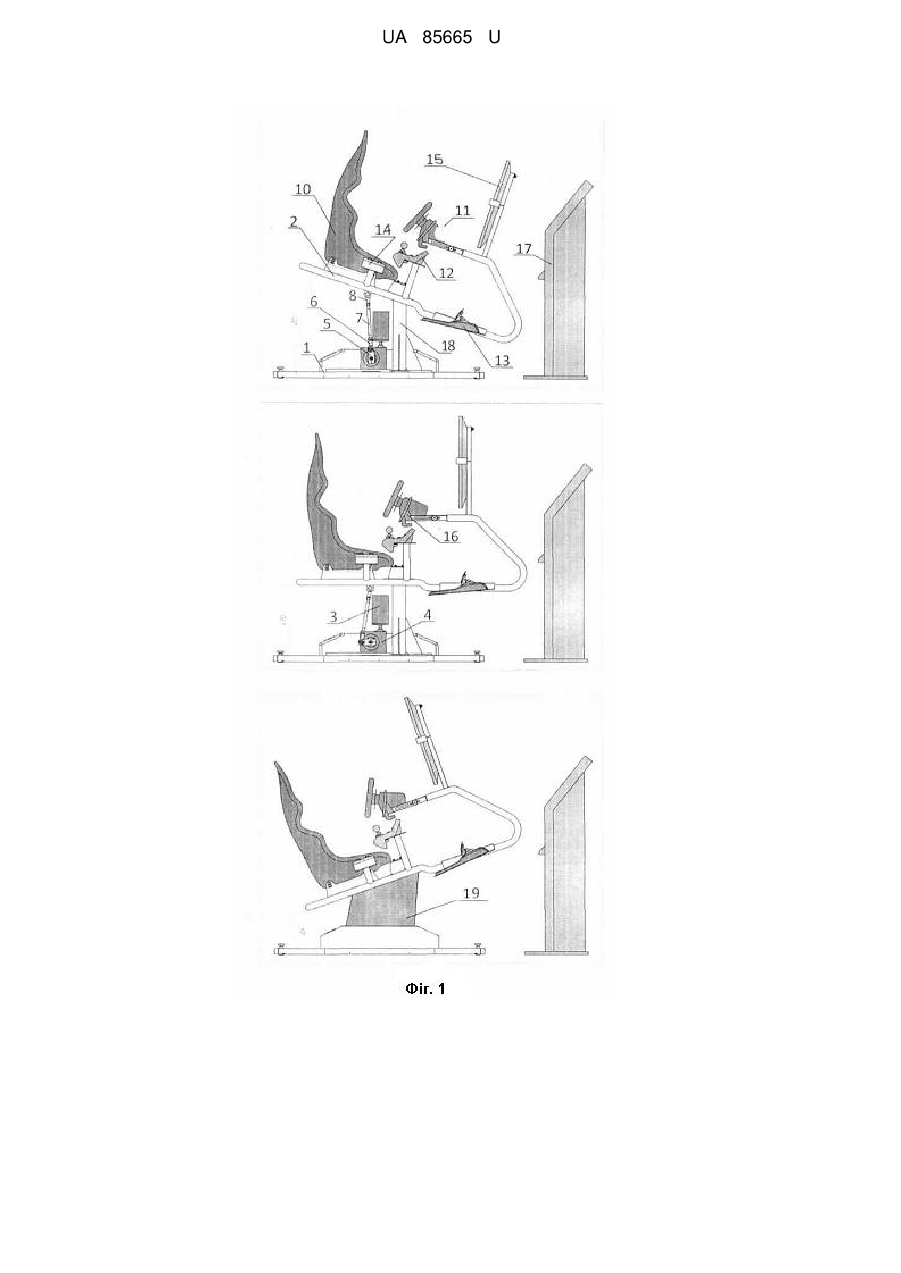
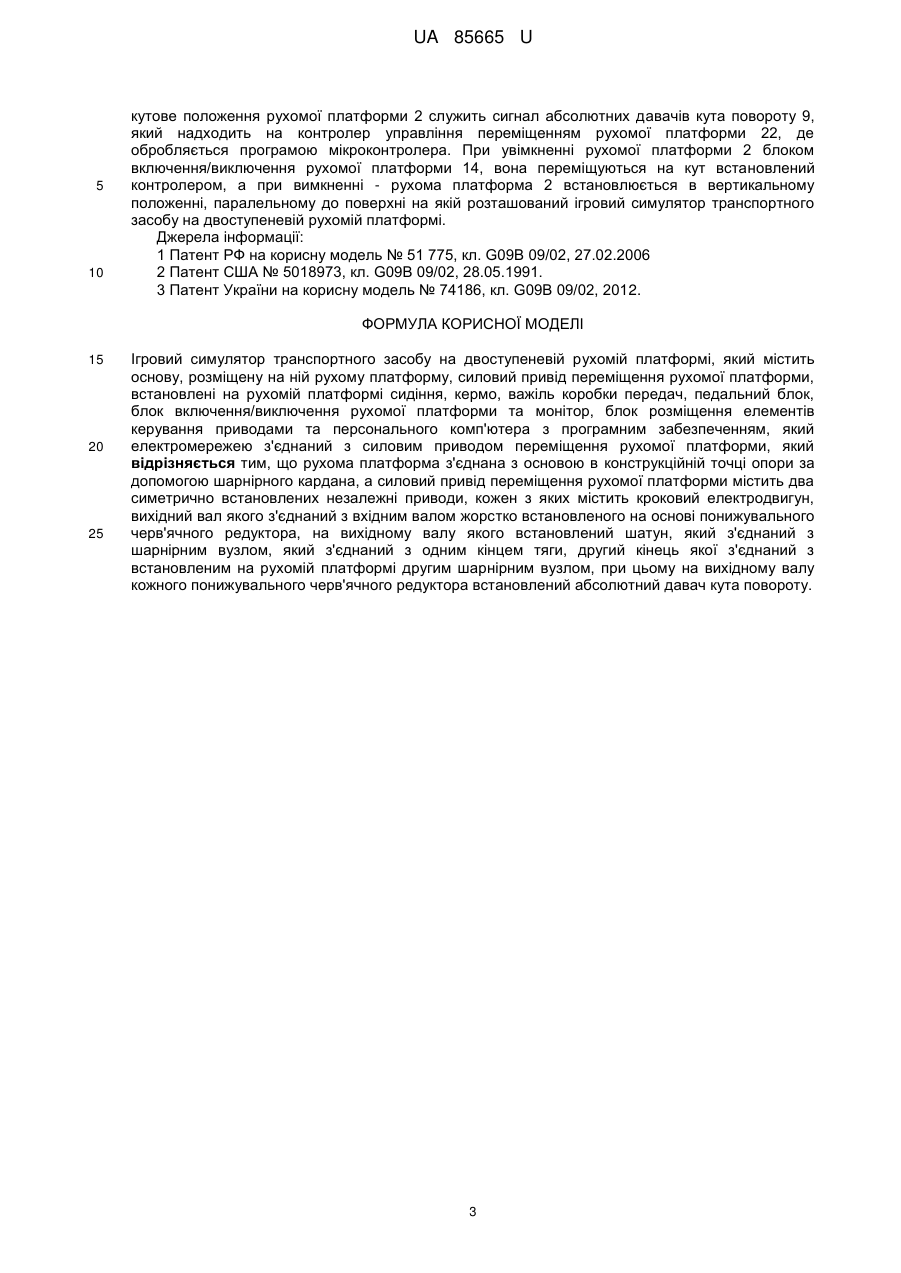
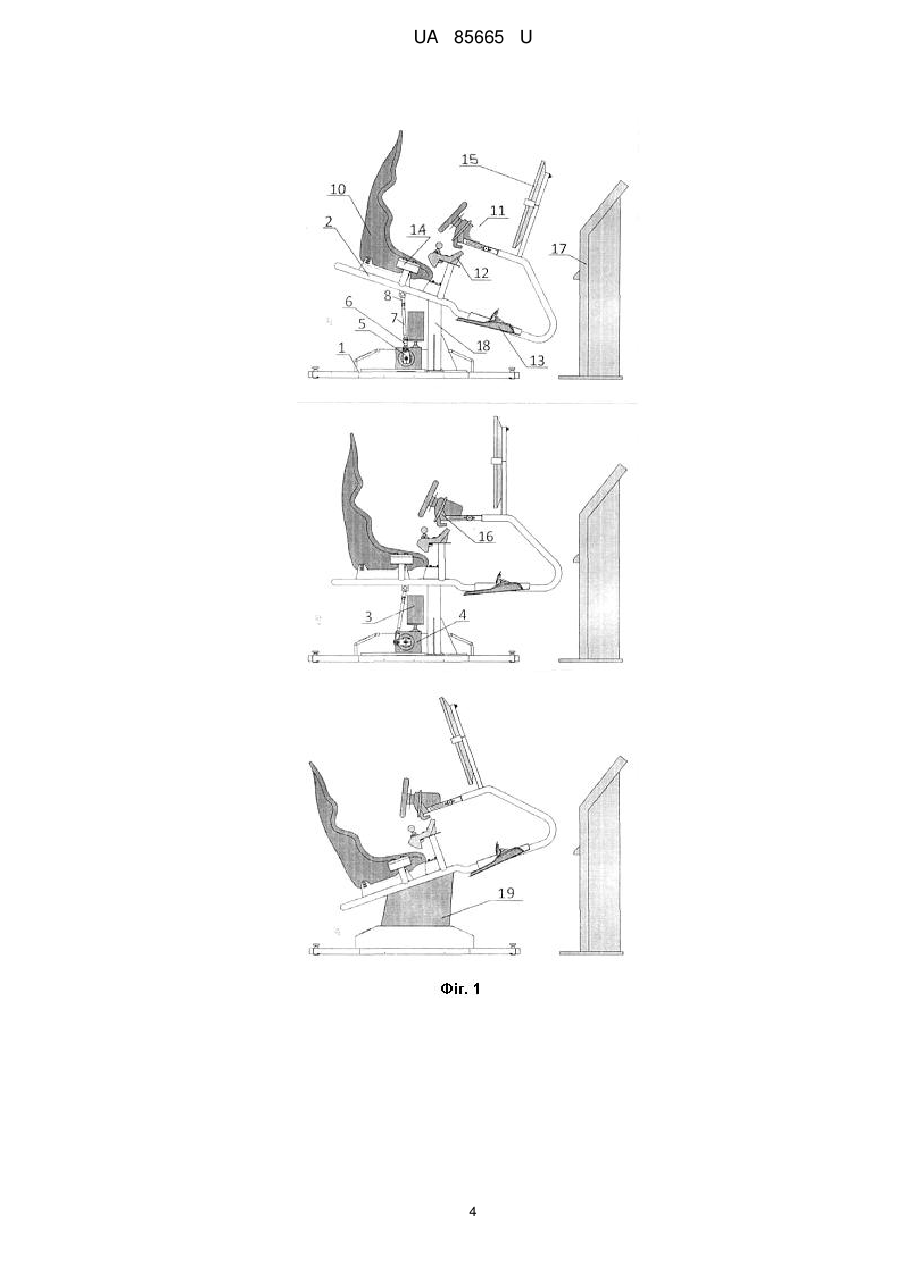
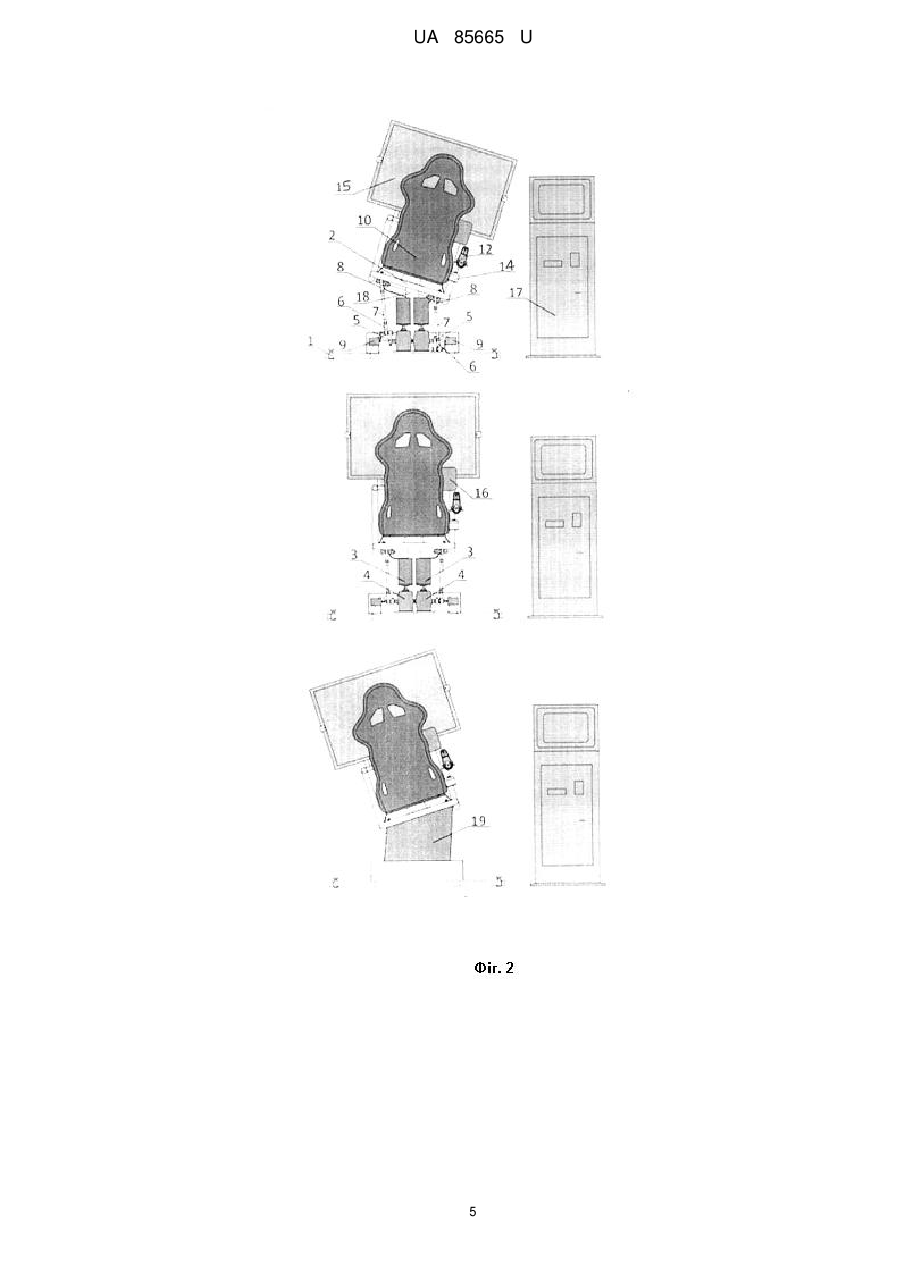
Реферат: UA 85665 U UA 85665 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до ігрового обладнання і може бути використана для моделювання подій у відеогрі як симулятор транспортного засобу. Відомі ігрові симулятори, які містять нерухому основу та рухому платформу, силовий привід та розміщені на рухомій платформі елементи керування транспортним засобом [1, 2, 3]. Найбільш близьким за технічним задумом та суттєвими ознаками до запропонованого ігрового симулятора транспортного засобу на двоступеневій рухомій платформі є тренажерсимулятор для спеціальної стенограмної підготовки ралійних екіпажів [3], який складається з нерухомої рами, двох регульованих спортивних сидінь, педального блока, важеля перемикання передач, керма, силових циліндрів, компресора, комп'ютерного дисплея, динаміків для імітації звукових ефектів від автомобіля, пульта установок з вібраторами, електронного блока керування тренажером, при цьому сидіння, педальний блок, кермо та комп'ютерний дисплей з динаміками встановлені на рухомому підрамнику, який приводиться в дію силовими циліндрами. Використання силових циліндрів робить його високо інерційним, а імпульсивний рух штоків гідроциліндрів не може забезпечити достовірну моторну та тактильну обстановку, наближену до реальної. Крім того, вище згаданий тренажер-симулятор є складним по конструкції в обслуговуванні і наладці. В основу корисної моделі поставлено задачу вдосконалити ігровий симулятор транспортного засобу на двоступеневій рухомій платформі, шляхом зміни конструкції з'єднань рухомої платформи з основою та силовим приводом та виконання силового приводу переміщення рухомої платформи у вигляді двох симетрично встановлених незалежних приводів, кожен з яких містить кроковий електродвигун, вихідний вал якого з'єднаний з вхідним валом жорстко встановленого на основі понижувального черв'ячного редуктора, що дозволило б забезпечити максимальну достовірність візуальних та фізичних ефектів, наближених до реальних інерційних та гравітаційних сил, що виникають під час прискорення, гальмування, проходження поворотів і відчуття нерівностей дорожнього покриття, тобто підвищити достовірність роботи симулятора в умовах, максимально приближених до реальних при одночасному спрощенні кінематичної схеми. Поставлена задача вирішується тим, що в ігровому симуляторі транспортного засобу на двоступеневій рухомій платформі, який містить основу, розміщену на ній рухому платформу, силовий привід переміщення рухомої платформи, встановлені на рухомій платформі, сидіння, кермо, важіль коробки передач, педальний блок, блок включення/виключення рухомої платформи та монітор, блок розміщення елементів керування приводами та персонального комп'ютера з встановленим спеціальним програмним забезпеченням, згідно з корисною моделлю, рухома платформа з'єднана з основою в конструкційній точці опори за допомогою шарнірного кардана, а силовий привід переміщення рухомої платформи, містить два симетрично встановлені незалежні приводи, кожен з яких містить кроковий двигун, вихідний вал якого з'єднаний з вхідним валом жорстко встановленого на основі понижувального черв'ячного редуктора, на вихідному валу якого встановлений шатун, який з'єднаний з шарнірним вузлом, з'єднаним з одним кінцем тяги, другий кінець якої з'єднаний з встановленим на рухомій платформі другим шарнірним вузлом, при цьому на вихідному валу кожного понижувального черв'ячного редуктора розміщений абсолютний давач кута повороту. Запропонована схема силового приводу разом з конструкційною схемою з'єднання рухомої платформи з основою, дозволяє забезпечити ігровому симулятору транспортного засобу на двоступеневій рухомій платформі статичну стійкість і лінійність механічних характеристик у всьому діапазоні зміни керування; лінійну залежність кутової швидкості обертання ротора від величини керуючого сигналу у всьому робочому діапазоні, високу швидкодію стосовно динамічних параметрів об'єкта керування, а також виключає самохід, тобто малий залишковий обертаючий момент при відсутності сигналу керування, що дозволяє підвищити достовірність роботи симулятора в умовах, максимально приближених до реальних при одночасному спрощенні кінематичної схеми та зниженні потужності керування при значних механічних потужностях на вихідному валу. На фіг. 1 зображено конструктивну схему ігрового симулятора транспортного засобу на двоступеневій рухомій платформі - вигляд збоку при різних тангажах, на фіг. 2 зображено конструктивну схему ігрового симулятора транспортного засобу на двоступеневій рухомій платформі - вигляд ззаду при різних кренах, на фіг. 3 - блок схема ігрового симулятора транспортного засобу на двоступеневій рухомій платформі. Ігровий симулятор транспортного засобу на двоступеневій рухомій платформі (фіг. 1, фіг. 2), містить основу 1, розміщену на ній рухому платформу 2, силовий привід переміщення рухомої 1 UA 85665 U 5 10 15 20 25 30 35 40 45 50 55 60 платформи, який містить два симетрично встановлені незалежні приводи, кожен з яких включає кроковий електродвигун 3, вихідний вал якого з'єднаний з вхідним валом жорстко встановленого на основі 1 понижувального черв'ячного редуктора 4, на вихідному валу якого встановлений шатун 5, який з'єднаний з шарнірним вузлом 6, з'єднаним з одним кінцем тяги 7, другий кінець якої з'єднаний з встановленим на рухомій платформі 2 другим шарнірним вузлом 8, встановлені на вихідному валу кожного понижувального черв'ячного редуктора 4 абсолютні давачі кута повороту 9, встановлені на рухомій платформі 2, сидіння 10, кермо 11, важіль коробки передач 12, педальний блок 13, блок включення/виключення рухомої платформи 14, монітор 15 та обладнання 16 для управління стрілкою на екрані монітора 15, блок розміщення елементів керування приводами та персонального комп'ютера з встановленим спеціальним програмним забезпеченням 17, який електромережею з'єднаний з кроковими електродвигунами 3. Рухома платформа 2 з'єднана з основою 1 в конструкційній точці опори рухомої платформи 2 разом з елементами керування, за допомогою шарнірного кардану 18. Між основою 1 і рухомою платформою 2 розміщено тканинний сильфон 19, який робить недоступними до гравця усі рухомі елементи механічного приводу. Блок-схема ігрового симулятора транспортного засобу на двоступеневій рухомій платформі (фіг. 3) містить персональний комп'ютер 20, вихід якого з'єднаний з входом перетворювача інтерфейсу 21, вихід якого з'єднаний з першим входом контролера управління переміщенням рухомої платформи 22, другий та третій входи якого відповідно з'єднані з виходом блока живлення контролера управлінням переміщенням рухомої платформи 23 та виходом кнопкової станції 24, а перший та другий виходи контролера управління переміщенням рухомої платформи 22 з'єднані з першими входами драйверів крокових електродвигунів 25, 26, виходи яких з'єднані з входами відповідно першого та другого крокових електродвигунів 3, виходи яких через перший та другий понижувальні редуктори 4 з'єднані з рухомою платформою 2 та входами відповідно першого та другого абсолютного давача кута повороту 9, виходи яких відповідно з'єднані з четвертим та п'ятим входами контролера управління переміщенням рухомої платформи 22, а другі входи драйверів крокових електродвигунів 25, 26, з'єднані з силовим блоком живлення 27 крокових електродвигунів. Ігровий симулятор транспортного засобу на двоступеневій рухомій платформі працює наступним чином. Насамперед, гравець для якомога зручнішого розташування в ігровому стимуляторі транспортного засобу на двоступеневій рухомій платформі, відповідно до своїх вподобань, підлаштовує рухому платформу 2 з педальним блоком 13 і сидінням 10, кермом 11. Розмістившись в сидінні 10, пристібається пасками безпеки. За допомогою приладів управління комп'ютером вибирає потрібну відеогру. Вмикає кнопку "старт" на блоці керування включення/виключення рухомої платформи 14. Керує у відеогрі транспортним засобом за допомогою керма 11, педалей педального блока 13 і важеля коробки передач 12. Рухома платформа 2 моделює комбінації швидких та повільних рухів пропорційних дій у відеогрі, що передають гравцю зворотну вестибулярно-тактильну інформацію про зміни векторів інерційних та гравітаційних сил, що виникають під час прискорення, гальмування, проходження поворотів і відчуття нерівностей дорожнього покриття, створюючи ефект присутності у салоні чи кабіні транспортного засобу, дивлячись через вітрове скло монітора 15. Крім відчуття динамічних сил гравець також може відчути ефекти, які додають більшої реалістичності, таких як вібрації двигуна та керма. Рух рухомої платформи 2 забезпечують два незалежних приводи, при зміні положення вала понижувального черв'ячного редуктора 4 шатуни 5 завдяки шарнірним вузлам 6, 8 і тягам 7 примушують рухому платформу 2 рухатись у просторі. Завдяки таким двом з'єднанням та шарнірному кардану 18, рухома платформа 2 поєднує в собі рух навколо своєї поздовжньої (крен) і поперечної (тангаж) осей. Рухома платформа 2 забезпечує до 22 градусівнезалежних рухів крену і тангажа. В процесі роботи на персональному комп'ютері 20, блоку розміщення елементів керування приводами та персонального комп'ютера з програмним забезпеченням 17, вмикається гра, яка симулює рух транспортного засобу, за допомогою спеціального програмного забезпечення сигнали з гри, які відповідають динаміці автомобіля на екрані монітора 15, через перетворювач інтерфейсу 21, надходять на контролер керуванням переміщенням рухомої платформи 22, до складу якого входить однокристальний AVR мікроконтролер, який за допомогою спеціально розробленої програми, перетворює сигнали з персонального комп'ютера 20 в сигнали задання для драйверів крокових електродвигунів 25, 26, за допомогою яких, шляхом широтно-імпульсної модуляції, обробляється напруга силового блока живлення 27 крокових електродвигунів, та подається на перший та другий крокові електродвигуни 3, які через понижувальні черв'ячні редуктори 4 передають поступальні рухи на рухому платформу 2. Зворотним зв'язком про 2 UA 85665 U 5 10 кутове положення рухомої платформи 2 служить сигнал абсолютних давачів кута повороту 9, який надходить на контролер управління переміщенням рухомої платформи 22, де обробляється програмою мікроконтролера. При увімкненні рухомої платформи 2 блоком включення/виключення рухомої платформи 14, вона переміщуються на кут встановлений контролером, а при вимкненні - рухома платформа 2 встановлюється в вертикальному положенні, паралельному до поверхні на якій розташований ігровий симулятор транспортного засобу на двоступеневій рухомій платформі. Джерела інформації: 1 Патент РФ на корисну модель № 51 775, кл. G09B 09/02, 27.02.2006 2 Патент США № 5018973, кл. G09B 09/02, 28.05.1991. 3 Патент України на корисну модель № 74186, кл. G09B 09/02, 2012. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Ігровий симулятор транспортного засобу на двоступеневій рухомій платформі, який містить основу, розміщену на ній рухому платформу, силовий привід переміщення рухомої платформи, встановлені на рухомій платформі сидіння, кермо, важіль коробки передач, педальний блок, блок включення/виключення рухомої платформи та монітор, блок розміщення елементів керування приводами та персонального комп'ютера з програмним забезпеченням, який електромережею з'єднаний з силовим приводом переміщення рухомої платформи, який відрізняється тим, що рухома платформа з'єднана з основою в конструкційній точці опори за допомогою шарнірного кардана, а силовий привід переміщення рухомої платформи містить два симетрично встановлених незалежні приводи, кожен з яких містить кроковий електродвигун, вихідний вал якого з'єднаний з вхідним валом жорстко встановленого на основі понижувального черв'ячного редуктора, на вихідному валу якого встановлений шатун, який з'єднаний з шарнірним вузлом, який з'єднаний з одним кінцем тяги, другий кінець якої з'єднаний з встановленим на рухомій платформі другим шарнірним вузлом, при цьому на вихідному валу кожного понижувального черв'ячного редуктора встановлений абсолютний давач кута повороту. 3 UA 85665 U 4 UA 85665 U 5 UA 85665 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G09B 9/02, A63G 31/00
Мітки: ігровий, транспортного, засобу, двоступеневий, платформи, рухомий, симулятор
Код посилання
<a href="https://ua.patents.su/8-85665-igrovijj-simulyator-transportnogo-zasobu-na-dvostupenevijj-rukhomijj-platformi.html" target="_blank" rel="follow" title="База патентів України">Ігровий симулятор транспортного засобу на двоступеневій рухомій платформі</a>
Спосіб закріплення транспортного засобу з надувними колесами на залізничній платформі
Номер патенту: 38916
Опубліковано: 15.05.2001
Автор: Легеза Віктор Петрович
МПК: B60P 3/06
Мітки: залізничний, транспортного, надувними, закріплення, засобу, колесами, платформи, спосіб
Формула / Реферат:
Спосіб закріплення транспортного засобу з надувними колесами на залізничній платформі, по якому колеса транспортного засобу фіксують на підлозі платформи упорними брусками, елементи кріплення транспортного засоби з'єднують зі стійковими скобами платформи та натягують розтяжки, який відрізняється тим, що перед установкою розтяжок з коліс закріплюваного транспортного засобу стравлюють повітря, а після їх установки здійснюють нагнітання повітря...
Спосіб закріплення транспортного засобу з надувними колесами на залізничній платформі
Номер патенту: 53603
Опубліковано: 11.10.2010
Автори: Легеза Дмитро Вікторович, Іванова Юлія Ігорівна, Легеза Віктор Петрович
МПК: B60P 3/00
Мітки: спосіб, платформи, засобу, транспортного, надувними, залізничний, колесами, закріплення
Формула / Реферат:
Спосіб закріплення транспортного засобу з надувними колесами на залізничній платформі, що включає фіксування коліс транспортного засобу на підлозі платформи упорними брусками, з'єднання елементів кріплення транспортного засобу зі стійковими скобами платформи та натягування розтяжки, який відрізняється тим, що перед встановленням розтяжок з коліс транспортного засобу випускають повітря, а після їх встановлення здійснюють нагнітання повітря в...
Пристрій для закріплення різногабаритних вантажів на платформі транспортного засобу та спосіб його фіксації
Номер патенту: 60251
Опубліковано: 15.09.2003
Автори: Бердников Станіслав Миколайович, Демченко Олег Викторович, Байраченко Олена Іванівна, Головко Олександр Вікторович
Мітки: вантажів, платформи, спосіб, засобу, пристрій, транспортного, закріплення, різногабаритних, фіксації
Формула / Реферат:
1. Пристрій для закріплення різногабаритних вантажів на платформі транспортного засобу, який містить вертикальні напрямні, з'єднані гнучким зв'язком, охоплюючим напрямні елементи, та замок закріплення гнучкого зв'язку, який відрізняється тим, що замок має основу у вигляді барабана, утримуючого кінець гнучкого зв'язку, при цьому барабан обертається ручним способом за допомогою не менше ніж чотирьох радіальних рукояток, які складають з...
Пристрій для кріплення великогабаритних вантажів на платформі транспортного засобу
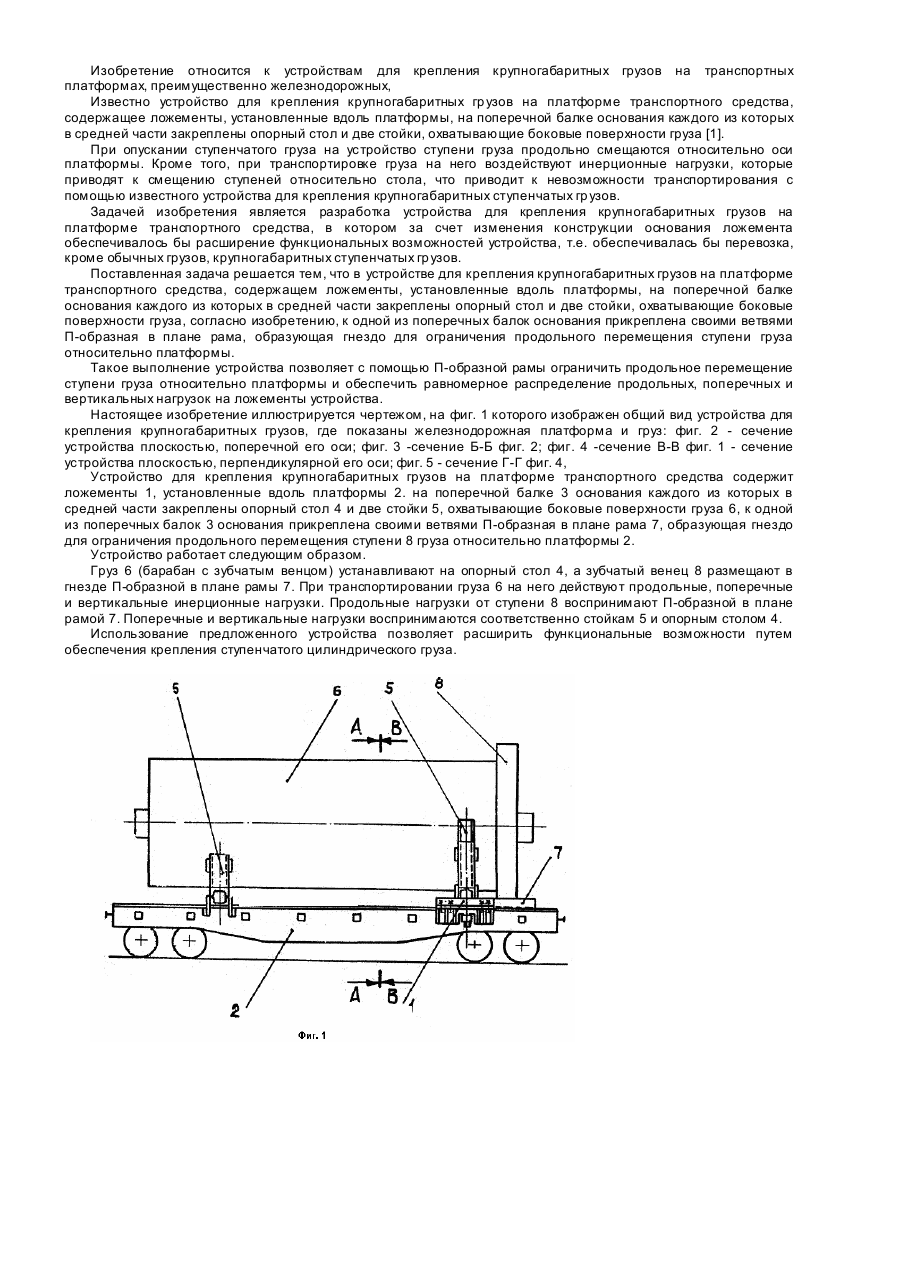
Номер патенту: 4601
Опубліковано: 28.12.1994
Автори: Шінкарєнко Владімір Ніколаєвіч, Завгородній Іван Павлович, Малов Арнольд Дмітрієвіч, Лавренов Борис Миколайович
МПК: B60P 7/06
Мітки: транспортного, пристрій, засобу, кріплення, великогабаритних, вантажів, платформи
Формула / Реферат:
Устройство для крепления крупногабаритных грузов на платформе транспортного средства, содержащее ложементы, установленные вдоль платформы, на поперечной балке основания каждого из которых в средней части закреплены опорный стол и две стойки, охватывающие боковые поверхности груза, отличающееся тем, что к одной из поперечных балок основания прикреплена своими ветвями П-образная в плане рама, образующая гнездо для ограничения продольного...
Пристрій для кріплення вантажу на платформі транспортного засобу
Номер патенту: 4600
Опубліковано: 28.12.1994
Автори: Завгородній Іван Павлович, Лавренов Борис Миколайович, Шінкарєнко Владімір Ніколаєвіч, Малов Арнольд Дмітрієвіч
МПК: B60P 7/06
Мітки: вантажу, платформи, засобу, пристрій, транспортного, кріплення
Формула / Реферат:
1. Устройство для крепления груза на платформе транспортного средства, содержащее жестко закрепленное на грузе основание и элемент крепления основания к платформе, представляющий собой соединенный с основанием стяжными болтами вертикальный кронштейн, один конец которого расположен с возможностью взаимодействия с нижней поверхностью боковой балки платформы, отличающееся тем, что основание выполнено в виде L-образного кронштейна, к верхней...
Попередній патент: Вібраційний млин
Наступний патент: Пристрій для формування оклюзійної площини верхнього прикусного валика і нанесення на ньому антропометричних орієнтирів
Випадковий патент: Просторовий металевий виливок