Спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду
Номер патенту: 95107
Опубліковано: 10.12.2014
Автори: Спіцин Віталій Сергійович, Прохоров Ілья Вадимович, Федотов Мирослав Іванович, Кав'юк Вадим Володимирович, Васильєв Борис Георгійович, Стояновський Дмитро Анатолійович
Формула / Реферат
Спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду, який полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда, відносний кут повороту вектора швидкості однієї з двох точок стеження причепа - точки переднього звису (згідно з напрямком руху) або точки шарнірного з'єднання ланок та відображують отриманий кут щодо можливості нагляду за його змінами або змінами відносного повороту вектора швидкості, який відрізняється тим, що режими повороту кермового колеса пов'язують з режимами необхідних змін радіусів повороту причепа: для руху з постійними радіусами повороту точок причепа корегують поворотом кермового колеса виникаючі відхилення кута повороту вектора швидкості щодо його повернення у початковий стан, для зменшення радіусів повороту точок причепа корегують поворотом кермового колеса відносний поворот вектора швидкості щодо збільшення його кута, а для збільшення радіусів повороту - корегують поворот вектора для зменшення його кута, причому в усіх випадках поворот кермового колеса здійснюють у тому ж напрямку, у якому корегують поворот вектора швидкості, якщо стеження здійснюють у точці шарнірного з'єднання ланок, та у протилежному - якщо у точці переднього звису.
Текст
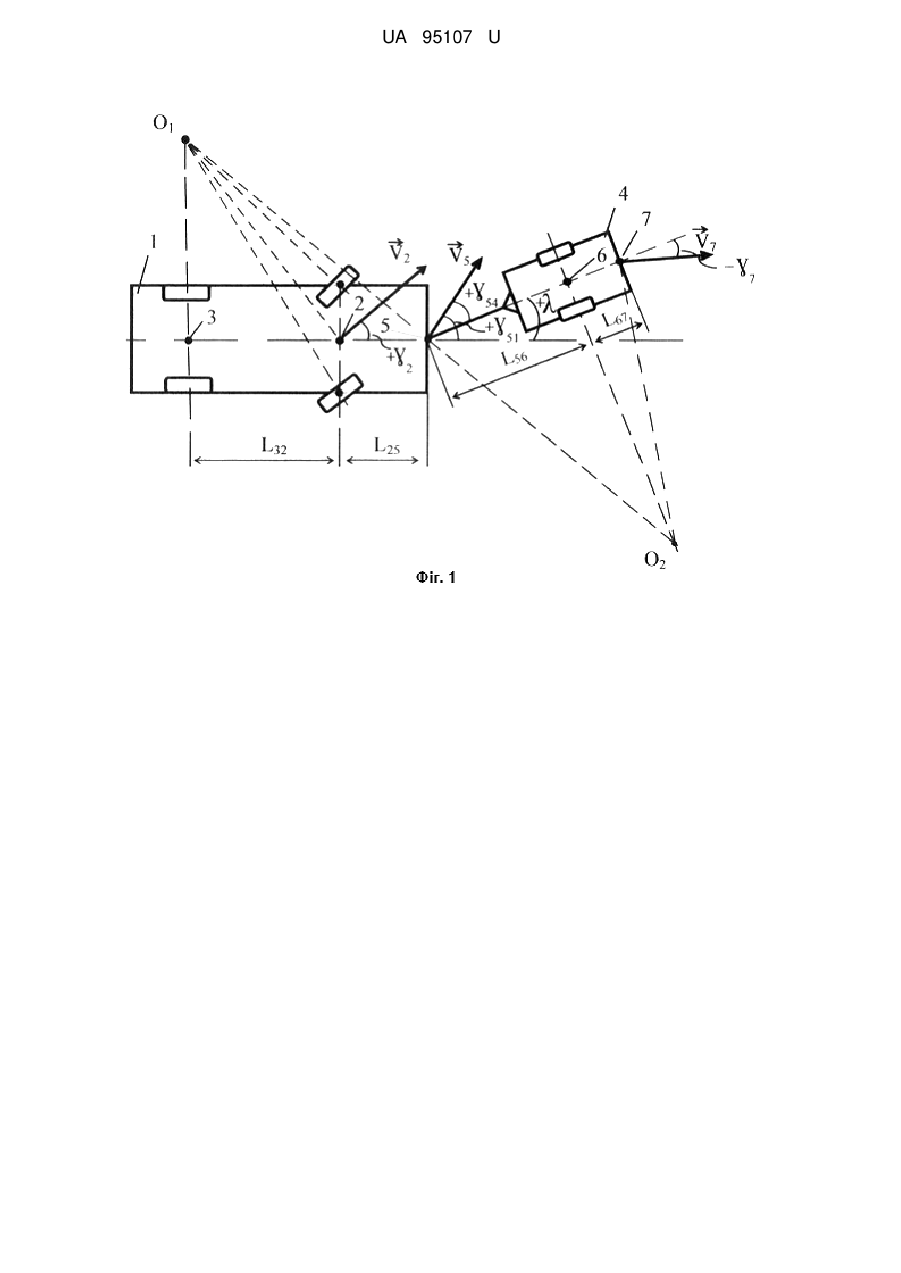
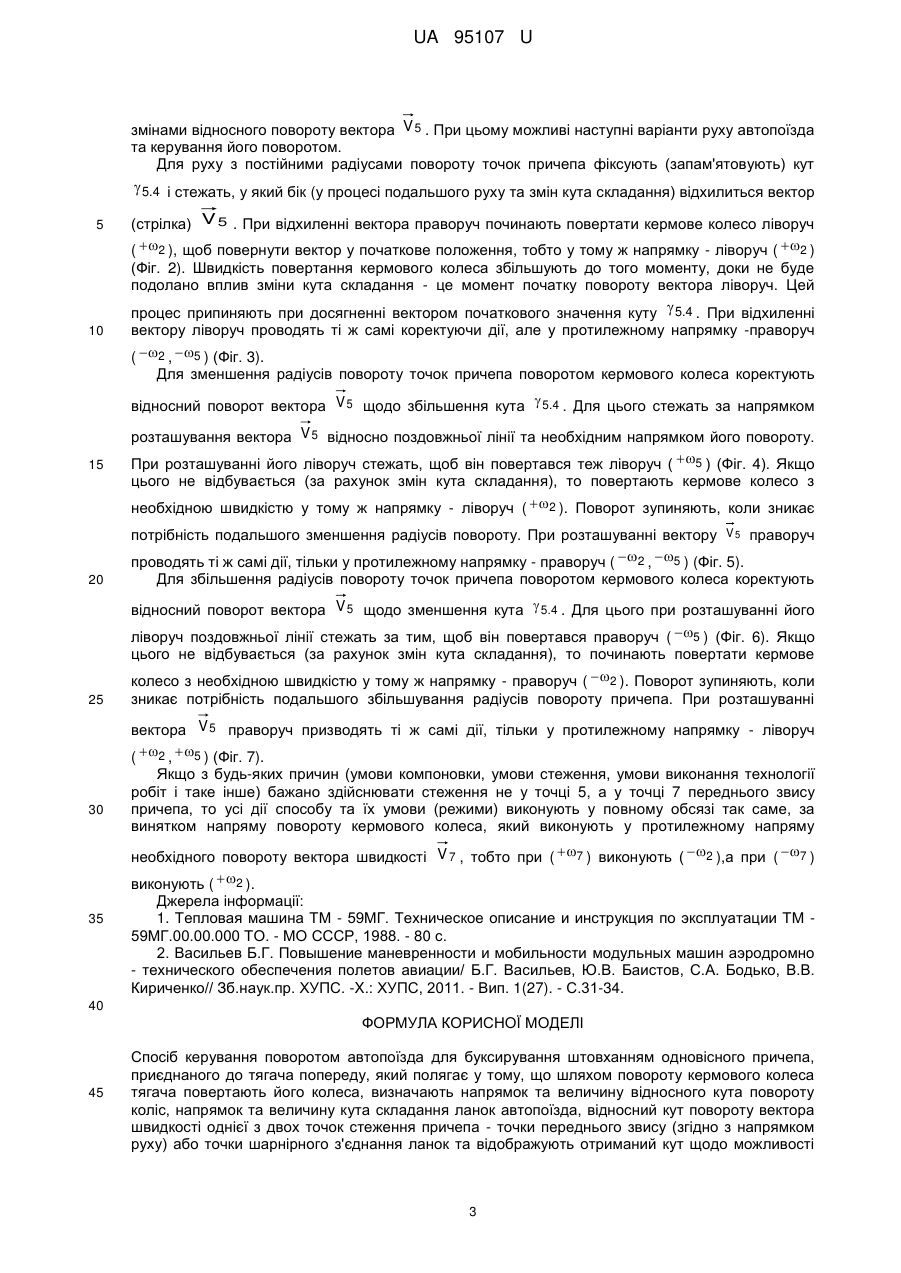
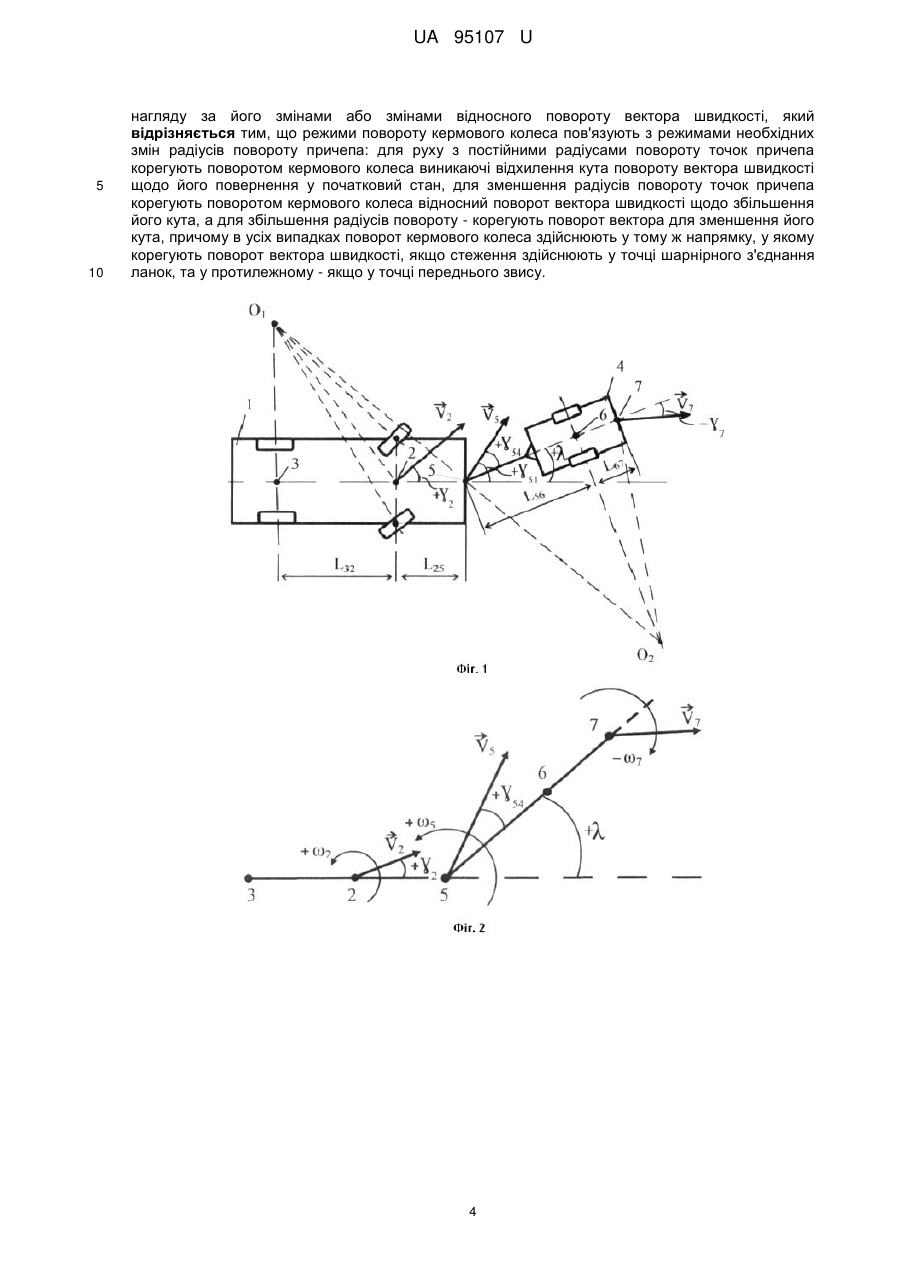
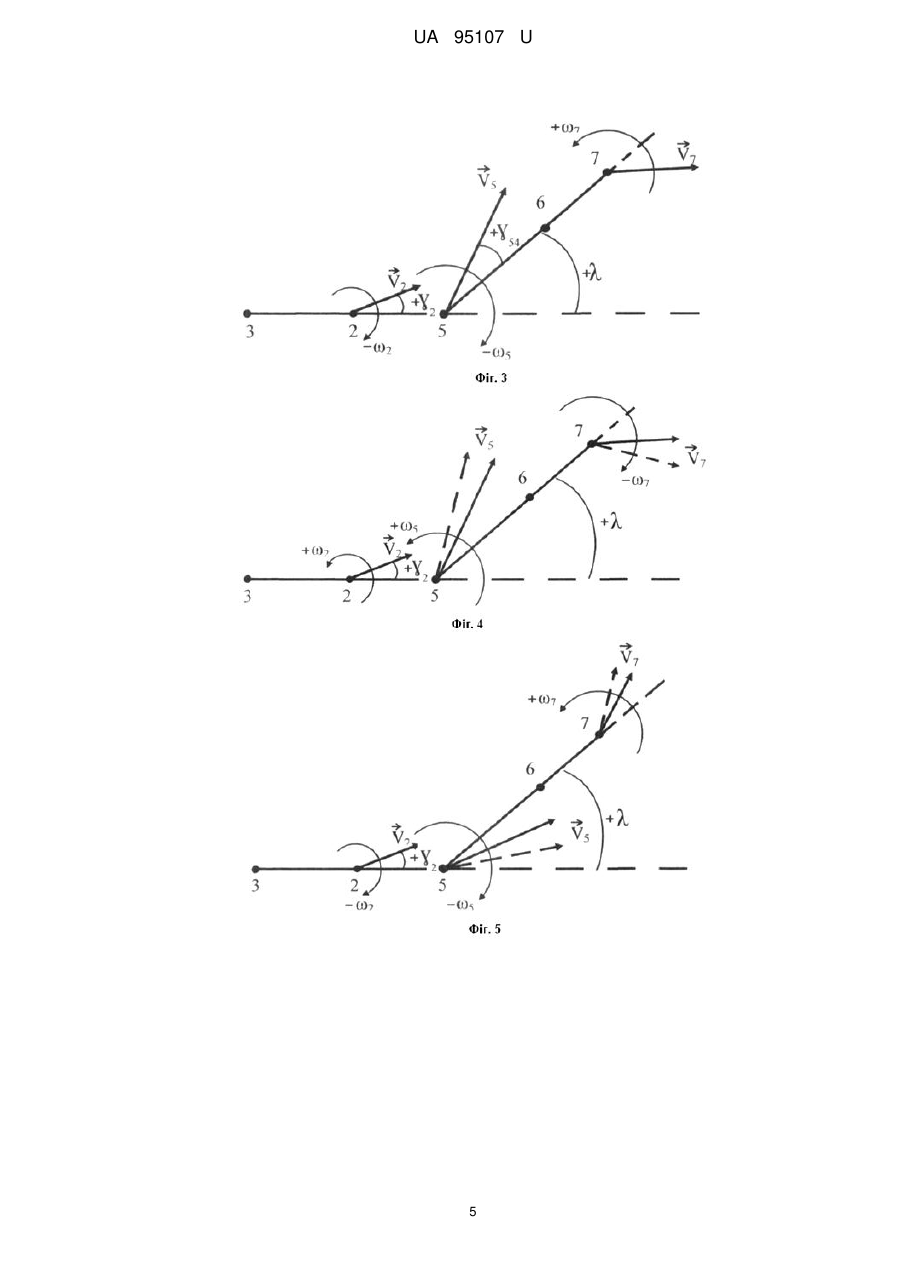
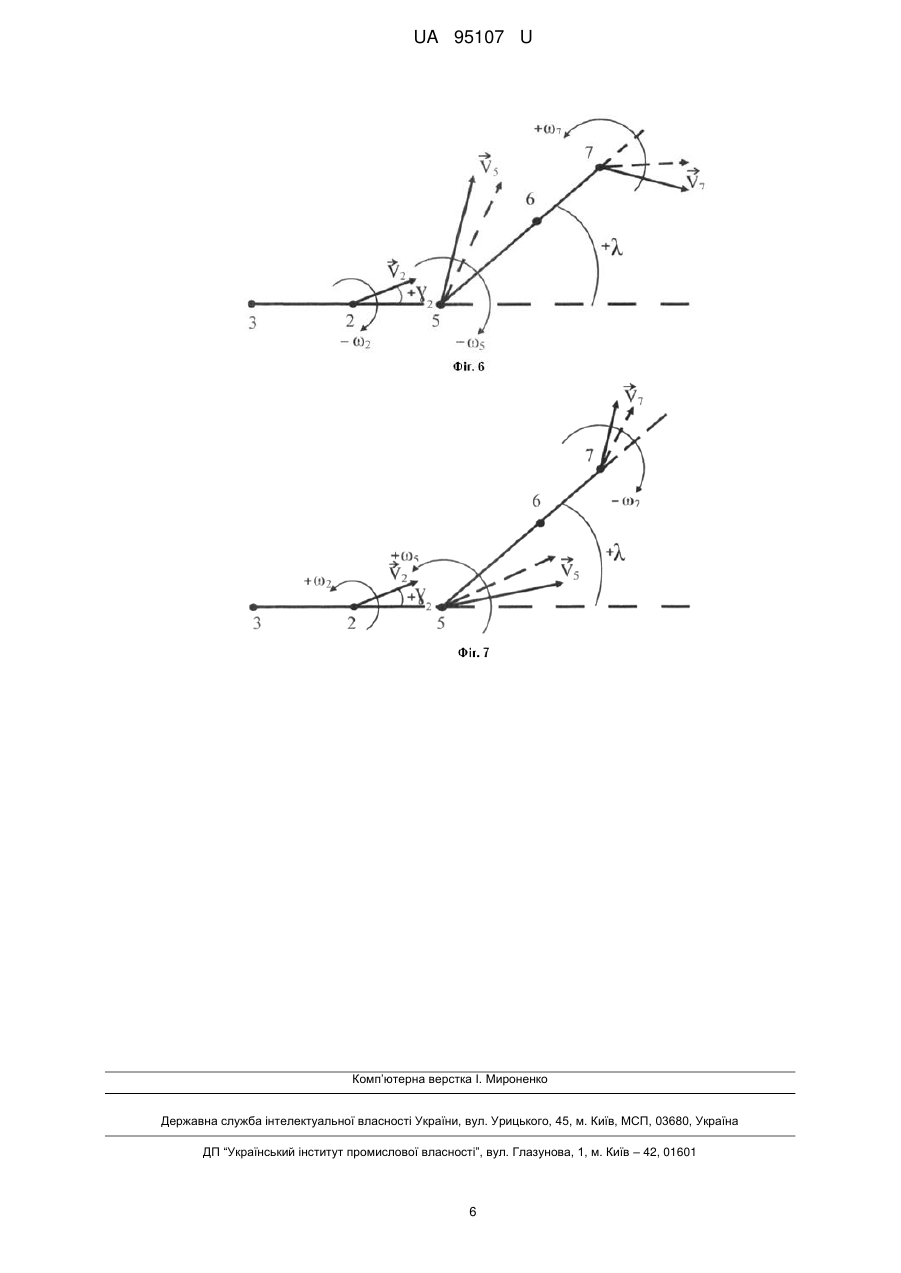
Реферат: Спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду, полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда, відносний кут повороту вектора швидкості однієї з двох точок стеження причепа - точки переднього звису (згідно з напрямком руху) або точки шарнірного з'єднання ланок та відображують отриманий кут щодо можливості нагляду за його змінами або змінами відносного повороту вектора швидкості. Режими повороту кермового колеса пов'язують з режимами необхідних змін радіусів повороту причепа: для руху з постійними радіусами повороту точок причепа корегують поворотом кермового колеса виникаючі відхилення кута повороту вектора швидкості щодо його повернення у початковий стан, для зменшення радіусів повороту точок причепа корегують поворотом кермового колеса відносний поворот вектора швидкості щодо збільшення його кута, а для збільшення радіусів повороту - корегують поворот вектора для зменшення його кута, причому в усіх випадках поворот кермового колеса здійснюють у тому ж напрямку, у якому корегують поворот вектора швидкості, якщо стеження здійснюють у точці шарнірного з'єднання ланок, та у протилежному якщо у точці переднього звису. UA 95107 U (12) UA 95107 U UA 95107 U 5 10 15 20 25 30 35 40 45 50 55 Запропонована корисна модель належить до автомобільної техніки та може бути використана при розробці дволанкових автопоїздів, у яких одновісний причіп з неповоротними колесами приєднується до тягача попереду, зокрема аеродромно-технічних машин (теплових машин, шнеко-роторних снігоочисників та ін.). Відомий спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду [1], суть якого полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса. Недоліком відомого способу є те, що він не дозволяє керувати поворотом автопоїзда з урахуванням складання його ланок при шарнірному приєднанні до тягача одновісного причепа з неповоротними колесами, а режими повороту кермового колеса зв'язують з режимами необхідних змін радіусів повороту точок тягача, для чого поворотом кермового колеса корегують відносний кут повороту коліс тягача, що призводить до не передбачуваного некерованого зростання кута складання ланок автопоїзда, примушує блокувати шарнір складання ланок автопоїзда, а колеса причепа виконувати у вигляді самоповоротних рояльних коліс. Найбільш близьким до запропонованого технічним рішенням, вибрано як прототип, є "спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду"[2], який полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда, відносний кут повороту вектора швидкості однієї з двох точок стеження причепа - точки переднього звису (згідно з напрямком руху) або точки шарнірного з'єднання ланок та відображують отриманий кут щодо можливості нагляду за його змінами або змінами відносного повороту вектора швидкості. Недоліком способу-прототипу є те, що у ньому відсутні режими та напрямки повороту, які, з урахуванням змін кута складання ланок автопоїзда у процесі руху, забезпечують поворот з постійними радіусами або бажане змінювання радіусів - зменшення або збільшення. Використовується тільки один режим виконання дій - синхронність повороту кермового колеса і відносного повороту вектора швидкості у точці стеження, яка можлива тільки при зупинці автопоїзда, а у процесі руху порушується. В основу корисної моделі поставлена задача створити спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду, який забезпечить можливість здійснення повороту з постійними радіусами або бажане змінювання радіусів (зменшення або збільшення) з урахуванням змін кута складання ланок автопоїзда у процесі руху. Поставлена задача вирішується за рахунок того, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда, відносний кут повороту вектора швидкості однієї з двох точок стеження причепа - точки переднього звису (згідно з напрямком руху) або точки шарнірного з'єднання ланок та відображують отриманий кут щодо можливості нагляду за його змінами або змінами відносного повороту вектора швидкості. Введені режими повороту кермового колеса зв'язують з режимами необхідних змін радіусів повороту причепа. Для руху з постійними радіусами повороту точок причепа корегують поворотом кермового колеса виникаючі відхилення кута повороту вектора швидкості щодо його повернення у початковий стан. Для зменшення радіусів повороту точок причепа корегують поворотом кермового колеса відносний поворот вектора швидкості щодо збільшення його кута, а для збільшення радіусів повороту - корегують поворот вектора для зменшення його кута. В усіх випадках поворот кермового колеса здійснюють у тому ж напрямку, в якому корегують поворот вектору швидкості, якщо стеження здійснюють у точці шарнірного з'єднання ланок, та у протилежному - якщо у точці переднього звису. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у вирішенні проблеми повороту дволанкового автопоїзда з шарнірним приєднанням попереду тягача одновісного причепа з неповоротними колесами для руху без зупинок по поворотах заданої крутості (постійної або змінної), розширенні можливої сфери застосування схеми дволанкових автопоїздів для машин, які потребують переднього розташування технологічного модулю (теплові машини аеродромно-технічного забезпечення польотів, шнеко-роторні снігоочисники та інші аеродромні та дорожні машини), покращенні маневреності. На Фіг. 1 наведена схема плоско-паралельного руху автопоїзда на повороті. На Фіг. 2 наведена схема здійснення режиму повороту для руху з постійними радіусами і відхиленням вектора V 5 праворуч. 1 UA 95107 U На Фіг. 3 наведена схема здійснення режиму повороту для руху з постійними радіусами і відхиленням вектора V 5 ліворуч. На Фіг. 4 наведена схема здійснення режиму повороту для зменшення радіусів повороту 5 причепа при розташуванні вектора V 5 ліворуч. На Фіг. 5 наведена схема здійснення режиму повороту для зменшення радіусів повороту причепа при розташуванні вектора V 5 праворуч. На Фіг. 6 наведена схема здійснення режиму повороту для збільшення радіусів повороту причепа при розташуванні вектора V 5 ліворуч. На Фіг. 7 наведена схема здійснення режиму повороту для збільшення радіусів повороту 10 причепа при розташуванні вектора V 5 праворуч. Суть способу керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду, полягає у наступному. Шляхом повороту кермового колеса тягача 1 повертають його поворотні колеса, розташовані у точці 2 (Фіг. 1). Визначають напрямок та величину відносного кута 2 цих коліс 15 (вектора швидкості V 2 у точці 2, наприклад за допомогою датчика у кермовому колесі). За позитивний напрямок усіх відносних кутів векторів швидкості приймають кут при відхиленні вектора ліворуч (тобто коли вектор повертається проти годинникової стрілки). За позитивний напрямок повороту кермового колеса також приймають поворот проти годинникової стрілки. 20 Тягач 1 рухається навколо свого центру повороту O1 , який розташовано на перетині радіусів повороту поворотних коліс у точці 2 та неповоротних коліс, розташованих у точці 3. Причеп 4, приєднаний до тягача 1 попереду у точці 5, рухається як ланка автопоїзда навколо свого центру 25 повороту O2 , який розташовано на перетині радіуса повороту неповоротних коліс у точці 6 та радіуса повороту у шарнірній точці 5, у якій причеп 4 приєднано до тягача 1. Одночасно визначають також напрямок та величину кута складання ланок автопоїзда у точці 5, який вимірюють за допомогою датчика кута. За позитивний напрямок цього кута приймають поворот причепа відносно тягача проти годинникової стрілки. За отриманими результатами та з урахуванням геометричних параметрів ланок автопоїзда ( L32 , L25 , L56 , L67 ) та умов руху кожної ланки навколо свого миттєвого центру повороту ( O1 , O2 ), визначають відносний кут повороту вектора швидкості однієї з двох точок стеження 30 точки 7 переднього звису причепа (кут 7 вектору V 7 ) або точки 5 (кут 54 вектору V 5 ). Ці кути визначають за алгебричними формулами [2]: 54 arctg((1 7 arctg( L 25 )tg 2 ) L32 (1) L 67 L tg( arctg((1 25 )tg 2 ))) L56 L32 (2) де 54 - відносний кут вектора V 5 (відносно поздовжньої лінії причепа); 35 2 - відносний кут вектора V 2 ; - кут складання ланок автопоїзда; 7 - відносний кут вектора V 7 ; L25 , L32 , L67 , L56 - геометричні параметри автопоїзда. 40 Для цього використовують електронно-обчислювальні пристрої або їх механічні аналоги, наприклад, важільний механізм - система важелів та тяг від кермової трапеції у точці 2 до точки 5, а потім, якщо потрібно - до точки 7. Усі подальші дії та умови виконання дій здійснюють однаково у будь-якій з двох точок стеження (5 або 7), за винятком знаків напрямків поворотів. Якщо стеження проводять у точці 5, то відображують отриманий кут 5.4 згідно (1) у вигляді стрілки у точці 5 (або на панелі приладів) для можливості нагляду за його змінами або за 2 UA 95107 U змінами відносного повороту вектора V 5 . При цьому можливі наступні варіанти руху автопоїзда та керування його поворотом. Для руху з постійними радіусами повороту точок причепа фіксують (запам'ятовують) кут 5.4 і стежать, у який бік (у процесі подальшого руху та змін кута складання) відхилиться вектор 5 (стрілка) V 5 . При відхиленні вектора праворуч починають повертати кермове колесо ліворуч ( 2 ), щоб повернути вектор у початкове положення, тобто у тому ж напрямку - ліворуч ( 2 ) (Фіг. 2). Швидкість повертання кермового колеса збільшують до того моменту, доки не буде подолано вплив зміни кута складання - це момент початку повороту вектора ліворуч. Цей 10 процес припиняють при досягненні вектором початкового значення куту 5.4 . При відхиленні вектору ліворуч проводять ті ж самі коректуючи дії, але у протилежному напрямку -праворуч ( 2 , 5 ) (Фіг. 3). Для зменшення радіусів повороту точок причепа поворотом кермового колеса коректують відносний поворот вектора V 5 щодо збільшення кута 5.4 . Для цього стежать за напрямком розташування вектора V 5 відносно поздовжньої лінії та необхідним напрямком його повороту. 15 При розташуванні його ліворуч стежать, щоб він повертався теж ліворуч ( 5 ) (Фіг. 4). Якщо цього не відбувається (за рахунок змін кута складання), то повертають кермове колесо з необхідною швидкістю у тому ж напрямку - ліворуч ( 2 ). Поворот зупиняють, коли зникає потрібність подальшого зменшення радіусів повороту. При розташуванні вектору V 5 праворуч 20 проводять ті ж самі дії, тільки у протилежному напрямку - праворуч ( 2 , 5 ) (Фіг. 5). Для збільшення радіусів повороту точок причепа поворотом кермового колеса коректують відносний поворот вектора V 5 щодо зменшення кута 5.4 . Для цього при розташуванні його ліворуч поздовжньої лінії стежать за тим, щоб він повертався праворуч ( 5 ) (Фіг. 6). Якщо цього не відбувається (за рахунок змін кута складання), то починають повертати кермове 25 колесо з необхідною швидкістю у тому ж напрямку - праворуч ( 2 ). Поворот зупиняють, коли зникає потрібність подальшого збільшування радіусів повороту причепа. При розташуванні вектора V 5 праворуч призводять ті ж самі дії, тільки у протилежному напрямку - ліворуч 30 ( 2 , 5 ) (Фіг. 7). Якщо з будь-яких причин (умови компоновки, умови стеження, умови виконання технології робіт і таке інше) бажано здійснювати стеження не у точці 5, а у точці 7 переднього звису причепа, то усі дії способу та їх умови (режими) виконують у повному обсязі так саме, за винятком напряму повороту кермового колеса, який виконують у протилежному напряму необхідного повороту вектора швидкості V 7 , тобто при ( 7 ) виконують ( 2 ),а при ( 7 ) 35 виконують ( 2 ). Джерела інформації: 1. Тепловая машина ТМ - 59МГ. Техническое описание и инструкция по эксплуатации ТМ 59МГ.00.00.000 ТО. - МО СССР, 1988. - 80 с. 2. Васильев Б.Г. Повышение маневренности и мобильности модульных машин аэродромно - технического обеспечения полетов авиации/ Б.Г. Васильев, Ю.В. Баистов, С.А. Бодько, В.В. Кириченко// Зб.наук.пр. ХУПС. -X.: ХУПС, 2011. - Вип. 1(27). - С.31-34. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду, який полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда, відносний кут повороту вектора швидкості однієї з двох точок стеження причепа - точки переднього звису (згідно з напрямком руху) або точки шарнірного з'єднання ланок та відображують отриманий кут щодо можливості 3 UA 95107 U 5 10 нагляду за його змінами або змінами відносного повороту вектора швидкості, який відрізняється тим, що режими повороту кермового колеса пов'язують з режимами необхідних змін радіусів повороту причепа: для руху з постійними радіусами повороту точок причепа корегують поворотом кермового колеса виникаючі відхилення кута повороту вектора швидкості щодо його повернення у початковий стан, для зменшення радіусів повороту точок причепа корегують поворотом кермового колеса відносний поворот вектора швидкості щодо збільшення його кута, а для збільшення радіусів повороту - корегують поворот вектора для зменшення його кута, причому в усіх випадках поворот кермового колеса здійснюють у тому ж напрямку, у якому корегують поворот вектора швидкості, якщо стеження здійснюють у точці шарнірного з'єднання ланок, та у протилежному - якщо у точці переднього звису. 4 UA 95107 U 5 UA 95107 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B62D 49/00, B62D 15/00, B62D 53/00
Мітки: тягача, попереду, штовханням, приєднаного, автопоїзда, спосіб, причепа, одновісного, буксирування, керування, поворотом
Код посилання
<a href="https://ua.patents.su/8-95107-sposib-keruvannya-povorotom-avtopozda-dlya-buksiruvannya-shtovkhannyam-odnovisnogo-prichepa-priehdnanogo-do-tyagacha-poperedu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду</a>
Спосіб управління рухом сідлового автопоїзда й пристрій для його здійснення
Номер патенту: 46239
Опубліковано: 15.05.2002
Автори: Агафонов Юрій Миколайович, Піскачов Олександр Іванович, П'янков Анатолій Андрійович
МПК: B62D 13/00, B62D 53/00
Мітки: автопоїзда, сідлового, здійснення, спосіб, управління, рухом, пристрій
Формула / Реферат:
1. Спосіб управління курсовим рухом сідлового автопоїзда, здебільшого з неповоротними відносно рами колесами напівпричепа, при якому вимірюють поточне значення кута складання тягача з напівпричепом і завертають колеса тягача, які управляються, на кут у залежності від зміни величин параметрів, які вимірюються, який відрізняється тим, що задають кут необхідного напрямку руху автопоїзда заднім ходом, вимірюють поточне значення різниці між...
Підвіска колісного одновісного причепа
Номер патенту: 36664
Опубліковано: 10.11.2008
Автори: Дмитриченко Микола Федорович, Дубневич Олександр Михайлович, Дівеєв Богдан Михайлович, Вікович Ігор Андрійович
МПК: B60G 13/00, F16F 3/00
Мітки: одновісного, причепа, підвіска, колісного
Формула / Реферат:
Підвіска колісного одновісного причепа, що містить ресори зі змінною робочою довжиною, яка відрізняється тим, що додатково містить вузли затиснення ресор, які встановлені на ресорах, та жорсткі важелі, з'єднані з вузлами затиснення ресор і встановлені з можливістю їх повороту та оперті на додаткові плоскі пружини.
Зчіпний пристрій, причіп та спосіб приєднання причепа до тягача
Номер патенту: 80602
Опубліковано: 10.10.2007
Автор: Хеслам Джеймс Генрі
МПК: B60D 1/00, B62D 13/00
Мітки: причіп, причепа, тягача, пристрій, зчіпний, спосіб, приєднання
Формула / Реферат:
1. Зчіпний пристрій, що містить засоби для установлювання на причепі, з можливістю повороту, принаймні одного лівого колеса і принаймні одного правого колеса, незалежні засоби для сполучення з можливістю повороту причепа з тягачем і засоби, які роблять можливим диференціальне повертання згаданих коліс і причепа відносно тягача, коли тягач виконує поворот, який містить засоби обмеження, пристосовані для зменшення під час роботи величини...
Спосіб регулювання гальмівної сили причепа автопоїзда
Номер патенту: 25465
Опубліковано: 10.08.2007
Автори: Магопець Сергій Олександрович, Золенко Олександр Олександрович, Кулєшков Юрій Володимирович, Чабаний Віктор Якович
МПК: B60T 7/20
Мітки: автопоїзда, причепа, гальмівної, регулювання, сили, спосіб
Формула / Реферат:
Спосіб регулювання гальмівної сили причепа автопоїзда, який полягає в передачі сигналу, пропорційного силі накату в зчіпному пристрої, на виконавчі пристрої гальмівних механізмів, який відрізняється тим, що спочатку і постійно під час гальмування датчиком вимірюють зусилля накату в зчіпному пристрої, порівнюють його з базовим сигналом, який визначають у відповідності із станом системи "гальмівні механізми - покриття дороги", і...
Підвіска одновісного колісного причепа
Номер патенту: 11784
Опубліковано: 16.01.2006
Автори: Дмитриченко Микола Федорович, Дубневич Олександр Михайлович, Дівеєв Богдан Михайлович, Вікович Ігор Андрійович
МПК: F16F 3/00, B60G 13/00
Мітки: колісного, причепа, підвіска, одновісного
Формула / Реферат:
Підвіска одновісного колісного причепа, що має раму, ресору зі змінною робочою довжиною, прикріплену до рами і до вузла кріплення ресори з колесом, яка відрізняється тим, що додатково містить гумовий пластинчастий елемент, встановлений між рамою і ресорою зі змінною робочою довжиною, та амортизатор сухого тертя асиметричного типу, що встановлений між рамою і вузлом прикріплення ресори з колесом та складається з профільованої пластини,...
Попередній патент: Автономна система вуличного освітлення
Наступний патент: Спосіб в’язання трикотажу на плосков’язальній машині
Випадковий патент: Пристрій для змащування гребенів коліс рейкового транспортного засобу