Полуавтомат для зняття облою з пластмасових деталей
Формула / Реферат
(57) 1. Полуавтомат для снятия облоя с пластмассовых деталей, содержащий связанный с приводом вращения стол с размещенными на его поверхности матрицами, горизонтально установленный над столом на корпусе, кинематически связанный с приводом вращения через коробку скоростей цилиндрический барабан со смонтированными в гнездах на его боковой поверхности подпружиненными толкателями, отличающийся тем, что он снабжен установленным на корпусе подпружиненным роликом, каждая матрица выполнена из двух половин, одна из которых неподвижная, а вторая выполнена из двух установленных с возможностью перемещения подпружиненных частей и винта для регулирования расстояния между половинами матрицы, при этом подпружиненный ролик установлен с возможностью взаимодействия с подпружиненными частями второй половины матрицы, а расстояние между матрицами выполнено кратным расстоянию между толкателями.
2. Полуавтомат по п. 1, о т л и ч а ю щ и й с я тем, что барабан выполнен с возможностью съема, а толкатели установлены с возможностью регулирования их вылета относительно боковой поверхности барабана и усилия сжатия пружин.
Текст
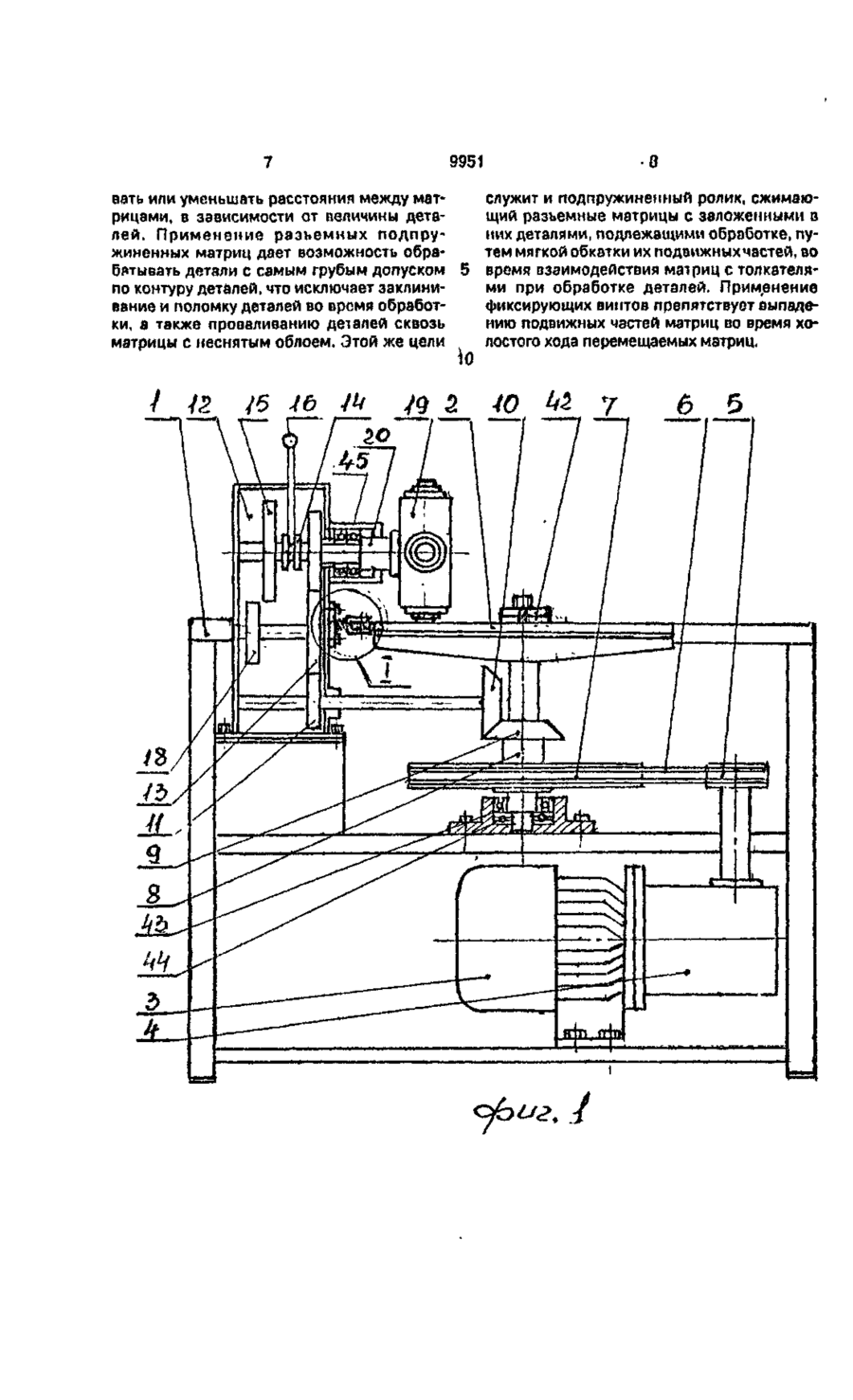
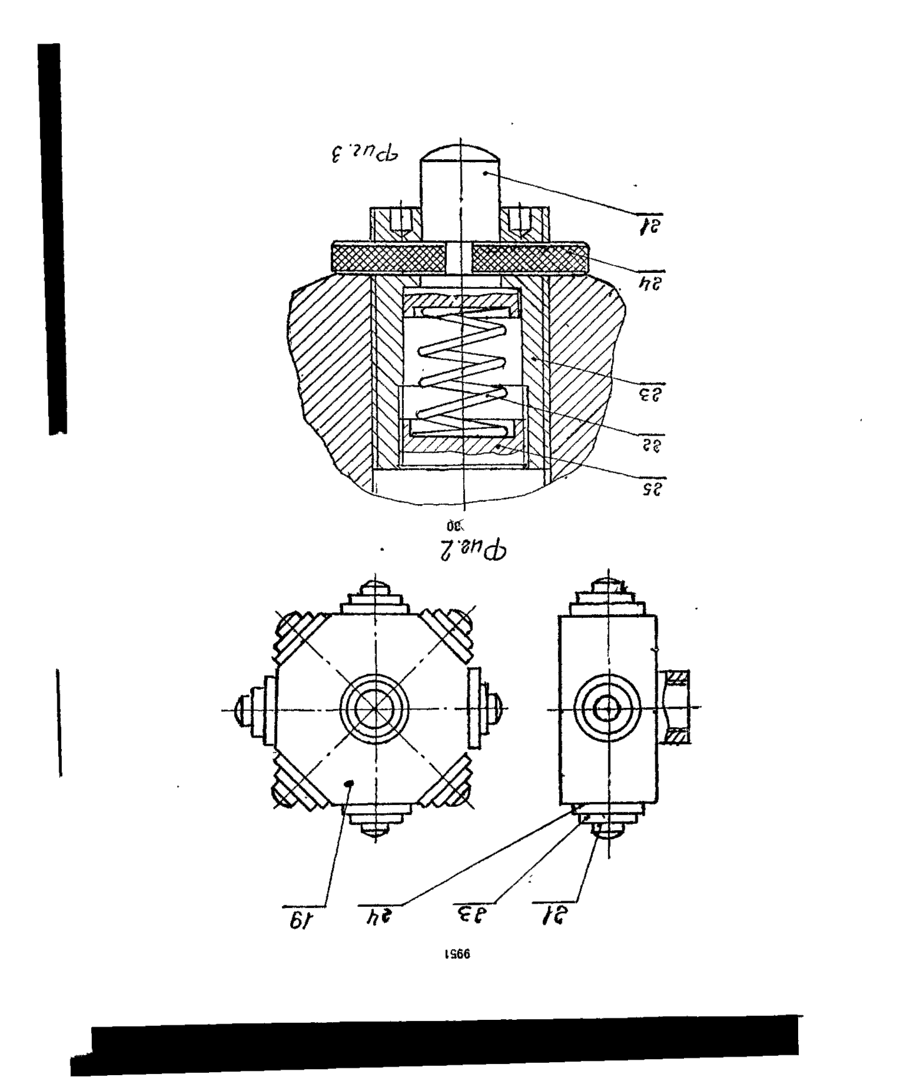
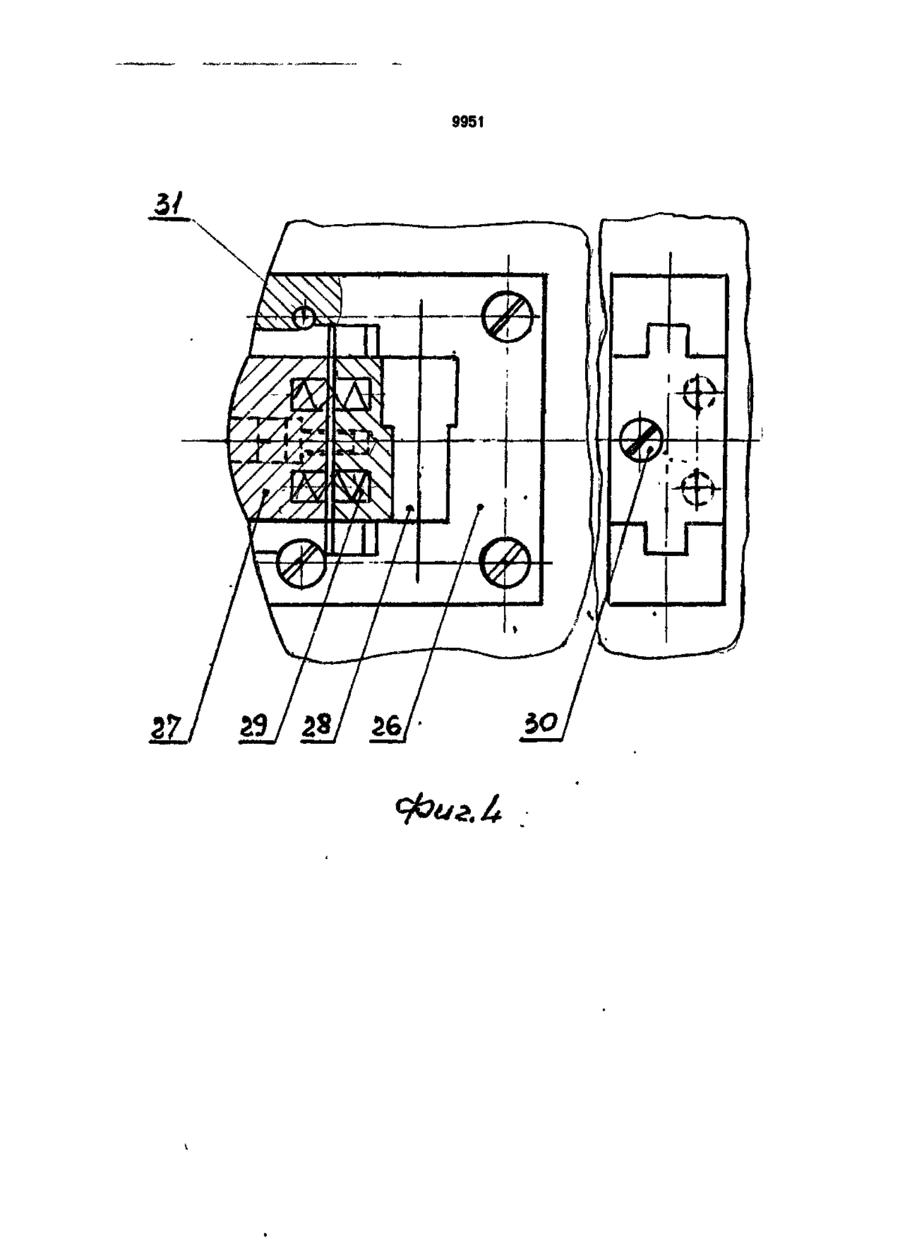
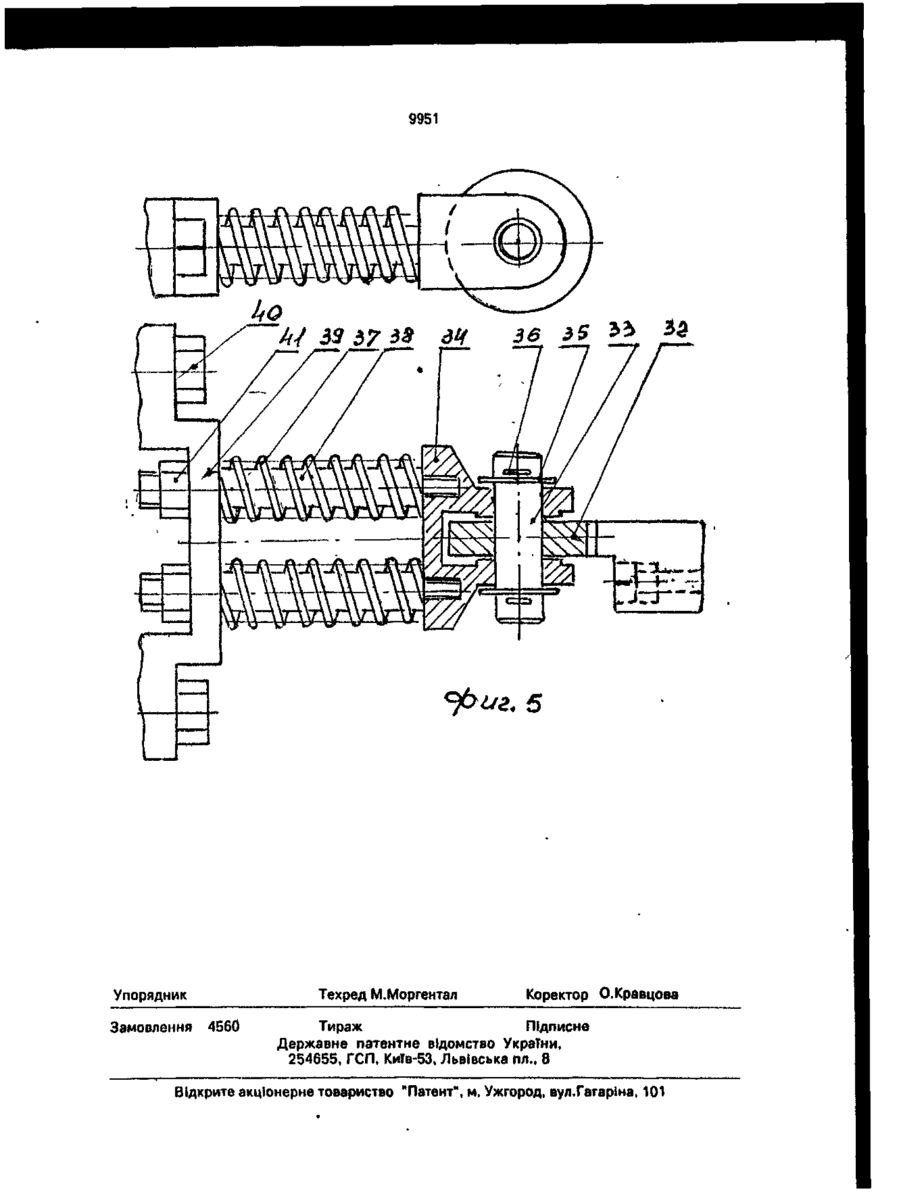
1. Полуавтомат для снятия облоя с пластмассовых деталей, содержащий связанный с приводом вращения стол с размещенными на его поверхности матрицами, горизонтально установленный над столом на корпусе, кинематически связанный с приводом вращения через коробку скоростей цилиндрический барабан со смонтированными в гнездах на его боковой поверхности подпружиненными толкателями, о т л и ч а ю щ и й с я тем, что он снабжен установленным на корпусе подпружиненным роликом, каждая матрица выполнена из двух половин, одна из которых неподвижная, а вторая выполнена из двухустановленных с возможностью перемещения подпружиненных частей и винта для регулирования расстояния между половинами матрицы, при этом подпружиненный ролик установлен с возможностью взаимодействия с подпружиненными частями второй половины матрицы, а расстояние между матрицами выполнено кратным расстоянию между толкателями. 2. Полуавтомат по п. 1, о т л и ч а ю щ и йс я тем, что барабан выполнен с возможностью съема, а толкатели установлены с возможностью регулирования их вылета относительно боковой поверхности барабана и усилия сжатия пружин. Изобретение относится к области машиностроения и может быть использовано в приборостроении и электротехнической промышленности при окончательной обработке деталей. Наиболее близким из известных станков по удалению облоя с пластмассовых деталей по технической сущности является полуавтомат для снятия облоя и литников с пластмассовых деталей, содержащий связанный с приводом стол с размещенными на его поверхности матрицами, горизонтально установленный над столом на корпусе, кинематически связанный с приводом вращения через коробку скоростей цилиндрический барабан со смонтированными в гнездах на его боковой поверхности подпружиненными толкателями [1]. Детали закладываются в матрицы, после чего толкатели станка, по мере поступления матриц к катку, продавливают их огіиз и облой снимается. Основным условием работы приведенного полуавтомата является то, что расстояние между матрицами должно точно соответствовать расстоянию между толкателями. Поскольку стол с катком кинематически связан, достигается синхронность работы матриц с толкателями. Но при зтом нельзя, например, оставляя расстояние между толкателями неизменным, увеличивать или уменьшать расстояние между мат* С > ел О 9951 рицами. Следовательно, можно обрабатывать детали только одних размеров, так как для более крупных деталей необходимо увеличивать расстояние между толкателями, Поскольку стол с катком кинематически связан, достигается совокупность работы матриц с толкателями. Но при этом нельзя, например, оставляя расстояние между толкателями неизменным, увеличивать или уменьшать расстояние между матрицами. Следовательно, можно обрабатывать детали только одних размеров, так как для более крупных деталей необходимо увеличивать расстояние между матрицами, а для более мелких - уменьшать их. Но при этом расстояния между толкателями также необходимо изменять в зависимости от расстояния между матрицами, а это приведет к изменению диаметра катка. Это недостаток полуавтомата. Задачей настоящего изобретения является устранение этих недостатков путем обеспечения возможности в зависимости от величины деталей увеличивать или уменьшать расстояния между матрицами при их кратности к расстоянию между толкателями и взаимосвязи с изменением скорости движения толкателей по отношению к скорости движения матриц, т, е. расширение технологических возможностей полуавтомата, при обработке деталей с разбросом размеров в пределах допуска. Указанная задача решается тем, что полуавтомат для снятия облоя с пластмассовых деталей, содержащий связанный с приводом вращения стол с размещенными по его окружности матрицами, горизонтально установленный над столом на корпусе, кинематически связанный с приводом вращения через коробку скоростей цилиндрический барабан со смонтированными в гнездах на его боковой поверхности подпружиненными толкателями, согласно изобретению, снабжен подпружиненным установленным на корпусе роликом, каждая матрица выполнена из двух половин, одна из которых неподвижная, а вторая выполнена из двух установленных с возможностью перемещения подпружиненных частей и винта для регулирования расстояния между половинами матрицы, при этом подпружиненный ролик установлен с возможностью взаимодействия с подпружиненными частями второй половины матрицы, а расстояние между матрицами выбирают кратным расстоянию между толкателями. При этом во время холостого перемещения матрицы выпадению ее подвижных частей препятствуют два фиксирующих винта, а выполнение расстояния между матрицами кратным расстоянию между толкателями дает возможность применять разные по величине матрицы, для обработки разных по величине деталей, барабан выполнен с воз5 можностью съема, а толкатели установлены с возможностью регулирования их вылета относительно боковой поверхности барабана и усилия сжатия пружин. Сущность изобретения поясняется чер10 тежами, где на: фиг. 1 изображен общий вид полуавтомата; фиг. 2 изображен барабан с толкателями; фиг. 3 изображен толкатель в разрезе; фиг. 4 изображена разъемная матрица; фиг. 5 показан ролик, взаимодейству15 ющий с подвижной частью матрицы. Полуавтомат содержит корпус 1 с поворотным столом 2. В нижней части полуавтомата установлен одно или двухскоростной электродвигатель 3 с редуктором 4, на вы20 ходном валу которого установлен шкив 5, при помощи ремней 6 передающий вращение шкиву 7, который сиязан с поворотным столом 2 посредством вала 8. Вал 8 связан с парой конических шестерен 9 и 10, имею25 щих равное число зубьев. При этом коническая шестерня 10 передает вращение шестерне 11, входящей в коробку скоростей 12, и через промежуточную шестерню 13 передающую Ьлоку шестерен 14 и 15 ораще30 ние. При переключении блока шестерен влево- посредством силки 16 и ручки 17 шестерня 14 выходит из зацепления с промежуточной шестерней 13, а шестерня 15 входит в зацепление с шестерней 18. 35 При этом восьмипозиционный барабан (число позиций зависит от габаритов обрабатываемых деталей) получает вторую ско' р о с т ь . Барабан 19 навинчивается на шпиндель 20 и является съемным и заменя40 емым. Это дает возможность устанавливать на шпиндель полуавтомата барабаны с разными расстояниями между толкателями, что повышает технологические возможности полуавтомата при обработке разных по ве45 личине деталей. Барабан 19 содержит толкатели 21, подпружиненные при помощи пружин 22. Каждый толкатель установлен в корпусе 23,ввинченном в барабан, при этом вылет корпуса 23 толкателя регулируется 50 при помощи гайки 24, а усилие пружин 22 регулируется при помощи резьбовой пробки 25. На поворотном столе 2 установлен сменный диск с разъемными матрицами. Каждая матрица состоит из основной но§5 подвижной части 26 и двух подвижных частей 27 и 28, разжатых пружинами 29. Зазор между ними регулируется винтом 30. При этом от выпадения во время холостого хода движения матриц подвижная часть 27 предохраняется винтами 31. Для этого подвиж 9951 ная часть 27 матриц имеет соответствующие выточки. С подвижной частью 27 матрицы взаимодействует ролик 32, сжимающий подвижные части матриц 27 и 28, сжимающие обрабатываемую деталь во время снятия облоя. Ролик 32 установлен на оси 33 и вилке 34 и зафиксирован шайбами 35 и шплинтами 36. Вилка 34 поджимается пружинами 37, установленными на стержнях 38, которые установлены в кронштейне 39, установленном на коробке скоростей при помощи болтов 40. Усилие пружин регулируется гайками 41. Поворотный стол 2 соединен с валом 8 при помощи шлицевого соединения и зафиксирован гайками 42. Вал 8 установлен в подпятнике, где вращается в радиальном подшипнике 43 и упорном подшипнике 44. Коробка скоростей имеет выступающую цилиндрическую часть с установленными в ней шарикоподшипниками 45, в которых вращается передняя часть шпинделя. Полуавтомат управляется автоматически выключателем (включение - выключение). При работе полуавтомата на первой скорости расстояние между матрицами должно быть равно расстоянию между толкателями. При работе полуавтомата на второй скорости расстояние между матрицами должно быть кратно расстоянию между толкателями. При работе полуавтомата на 3-й, 4-й, 5-й и более скоростях расстояние между матрицами должно быть кратно расстоянию между толкателями. Количество скоростей зависит от номенклатуры обрабатываемых деталей. Так, например, при уменьшении расстояния между матрицами по отношению к расстоянию между толкателями в 2 раза, скорость перемещения толкателей должна быть увеличена в два раза, и так далее. Коробка скоростей полуавтомата может иметь не 2 скорости, как показано на фиг. 1, а гораздо больше, в зависимости от потребности. При неизменном расстоянии между толкателями барабана, расстояние можно как уменьшать, так и увеличивать, но при этом необходимо увеличивать или уменьшать скорость перемещения толкателей по отношению к скорости перемещения матриц, соблюдая кратность расстояний между матрицами по отношению к расстоянию между толкателями. Это условие обязательно. Используя сменные барабаны 19, можно на барабанах менять конфигурацию толкателей и расстояние между ними. Это еще больше расширит технологические возможности полуавтомата. Работа полуавтомата осуществляется следующим образом. 5 10 15 20 25 30 35 40 45 50 Необходимо нажать кнопку включателя, после чего двигатель 3 через редуктор 4 и клиноременную передачу 5 начинает вращать круглый стол 2, на котором по окружности его расположены разъемные матрицы 26, 27, 28. В матрицу рабочий вкладывает детали, которые по мере вращения стола 2 поступают под барабан 19 с толкателями 21, расположенными по окружности его боковой поверхности. В то время, когда разъемная матрица поступает под толкатель 2 1 , ролик 32 начинает обкатываться по выпуклой поверхности подвижной части матрицы 27, которая под действием ролика 32 выбирает зазор между подвижными частями матрицы 26 и 27, сжимая пружины 29 и прочно обжимает обрабатываемую деталь, которую в этот момент проталкивает сквозь матрицу вниз толкатель 21. Толкатель подпружинен, поэтому на деталь он нажимает мягко, и если деталь, имеющая дефект не продавится сквозь матрицу, подпружиненный толкатель не повредит ее. После рабочего хода пружины 29 разжимают подвижные части матрицы 26 и 27 и обработанная деталь падает в приемник полуавтомата, который выносит деталь в подставленную тару. Ролик 32 скатывается с выпуклой части матрицы 27 и начинает обкатываться по боковой поверхности круглого стола 2, до подхода новой м а т р и ц ы , и цикл обработки повторяется. В том случае, когда приходится обрабатывать более крупные или более мелкие детали, что влияет на изменение расстояния между матрицами, посредством ручки 16 переключают полуавтомат на другую скорость, что дает возможность продолжать работу не изменяя расстояния между толкателями. Число скоростей полуавтомата зависит от того, на какой ассортимент деталей, отличающихся по размерам, рассчитан полуавтомат. Смена барабанов 19 с равными расстояниями между толкателями, также значительно расширяет технологические возможности полуавтомата. Полуавтомат значительно расширяет технологические возможности, и позволяет увеличить производительность по снятию облоя с пластмассовых деталей. Это достигается изменением кратности расстояний между матрицами сменных дисков стола, по отношению к расстояниям между толкателями сменных барабанов полуазтомата, и позволяет обрабатывать раз55 ные по величине детали, после предварительной переналадки полуавтомата. Скорость движения толкателей барабана кратна скорости движения матриц стола. Это дает возможность, оставляя расстояния между толкателями постоянными, увеличи 9951 вать или уменьшать расстояния между матрицами, в зависимости от пеличины деталей. Применение разъемных подпружиненных матриц дает возможность обрабатывать детали с самым грубым допуском по контуру деталей, что исключает заклинивание и поломку деталей во время обработки, а также проваливанию деталей сквозь матрицы с неснятым облоем. Этой же цели служит и подпружиненный ролик, сжимающий разъемные матрицы с заложенными в них деталями, подлежащими обработке, путем мягкой обкатки их подвижных частей, во время взаимодействия матриц с толкателями при обработке деталей. Применение фиксирующих винтов препятствует выпадению подвижных частей матриц во время холостого хода перемещаемых матриц. 6 5 1566 9951 9951 36 if /*—і It ІІ . 5 Техред М.Моргентал Упорядник Замовлення 4560 Коректор О.Кравцова Тираж Підписне Державне патентне відомство УкраТни, 254655, ГСП, Київ-53, Львівська пл м 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюSemiautomatic device for removal of burr from plastic articles
Автори англійськоюFedorov Volodymyr Arkadiiovych
Назва патенту російськоюПолуавтомат доля снятия облоя с пластмассовых изделий
Автори російськоюФедоров Владимир Аркадьевич
МПК / Мітки
МПК: B29C 37/00
Мітки: пластмасових, облою, деталей, полуавтомат, зняття
Код посилання
<a href="https://ua.patents.su/8-9951-poluavtomat-dlya-znyattya-obloyu-z-plastmasovikh-detalejj.html" target="_blank" rel="follow" title="База патентів України">Полуавтомат для зняття облою з пластмасових деталей</a>
Пристрій для зняття грату при контактно-стиковому зварюванні деталей
Номер патенту: 1611
Опубліковано: 25.10.1994
Автори: Бондарук Андрій Всеволодович, Думчев Євген Олександрович, Богорський Михайло Володимирович, Горонков Микола Дмитрович, Кучук-Яценко Сергій Іванович, Беляєв Данило Іванович, Дідковський Олександр Володимирович, Череднічок Віталій Тимофійович
МПК: B23K 11/04
Мітки: грату, деталей, контактно-стиковому, пристрій, зварюванні, зняття
Формула / Реферат:
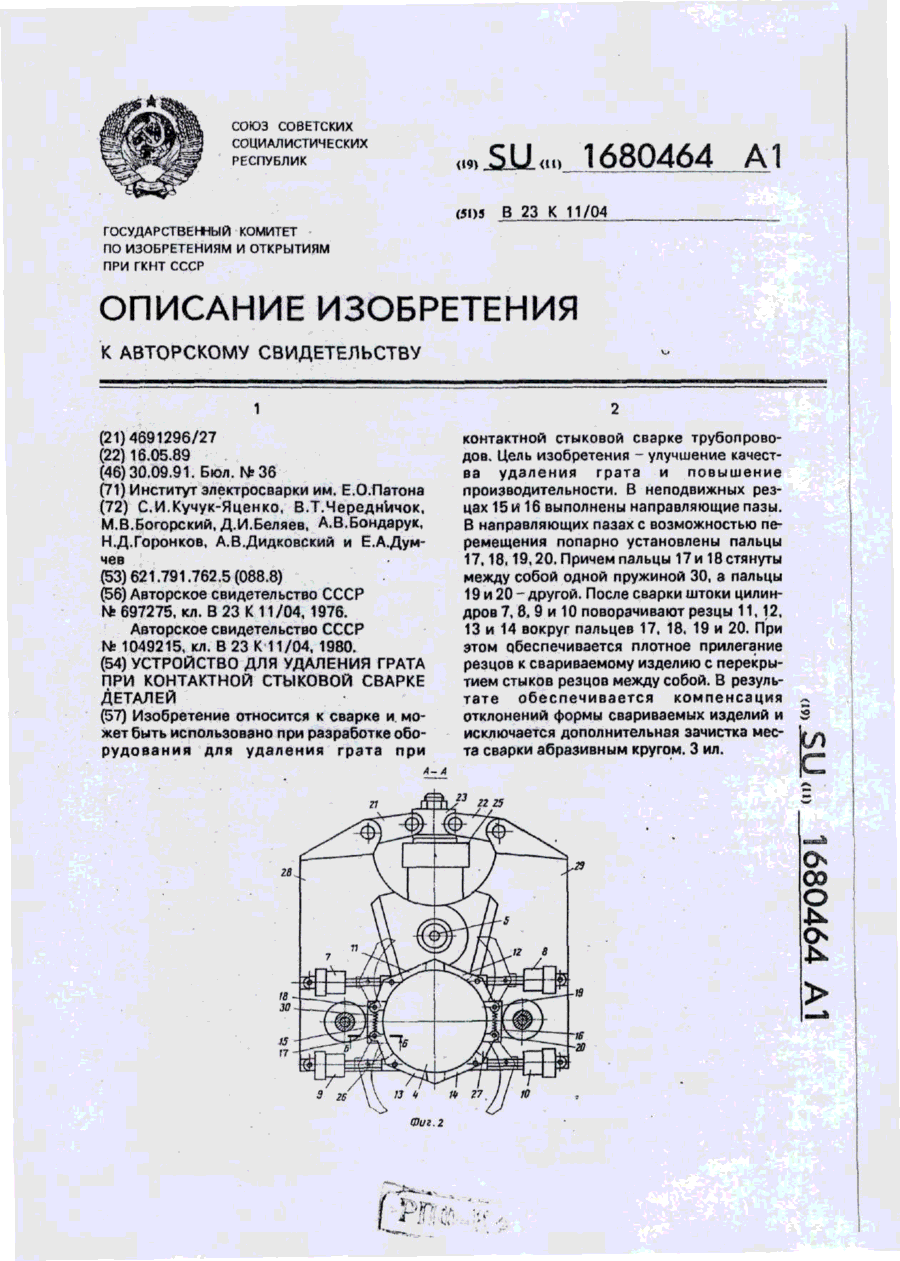
Устройство для удаления грата при контактной стыковой сварке деталей, преимущественно труб, содержащее разъемный корпус, выполненный в виде клещевого зажима, четыре цилиндра, установленные попарно на каждой из частей корпуса, шарнирно закрепленные на штоках цилиндров подвижные резцы и цилиндр зажатия, отличающееся тем, что, с целью улучшения качества удаления грата и повышения производительности, оно снабжено жестко закрепленными на...
Пристрій для зняття грата при контактному стиковому зварюванні деталей
Номер патенту: 308
Опубліковано: 30.04.1993
Автори: Кучук-Яценко Сергій Іванович, Лазебний Іван Леонтійович, Богорський Михайло Володимирович, Порхун Федір Костянтинович, Череднічок Віталій Тимофійович, Сахарнов Василь Олексійович, Кривенко Валерій Георгійович
МПК: B23K 11/04
Мітки: контактному, деталей, зварюванні, грата, пристрій, стиковому, зняття
Формула / Реферат:
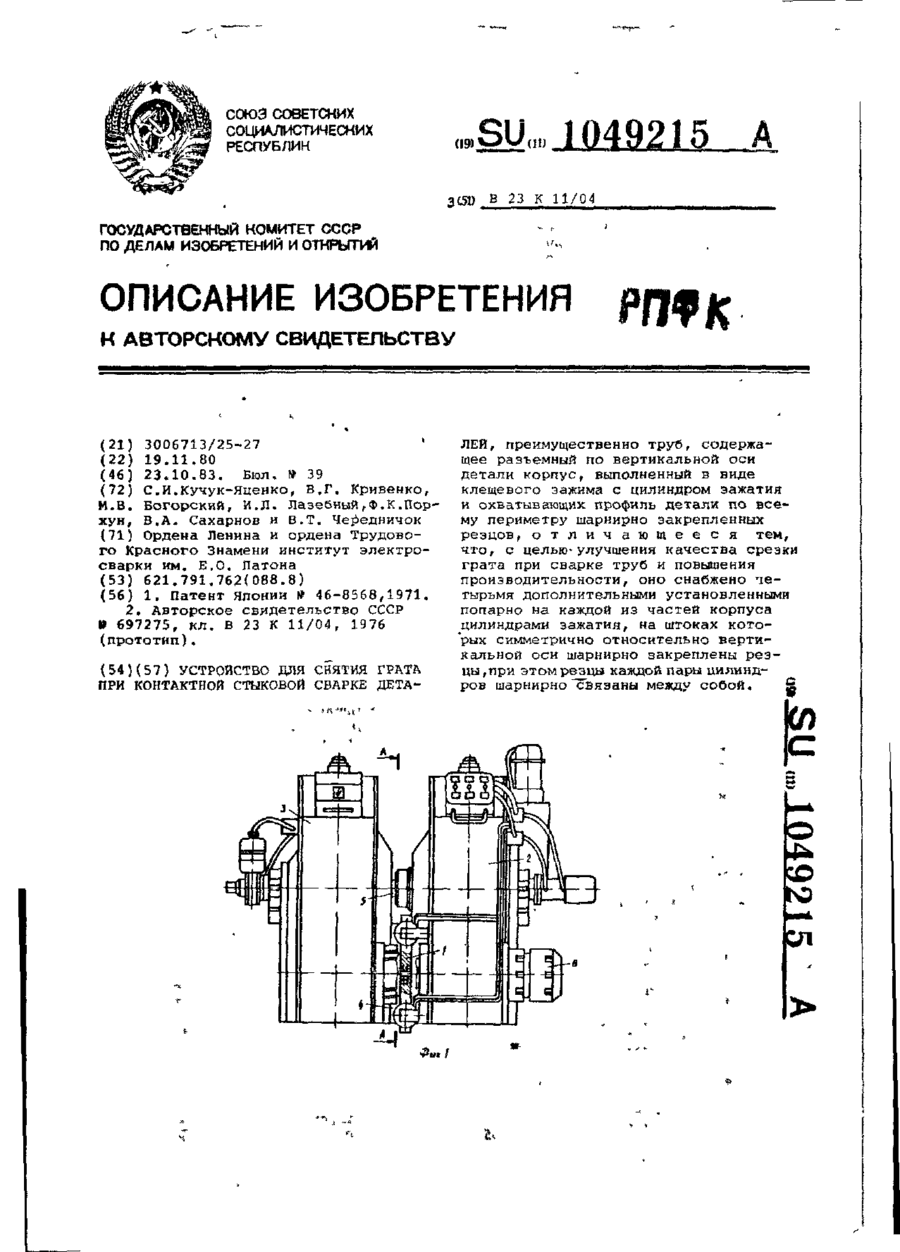
(57) Устройство для снятия грата при контактной стыковой сварке деталей, преимущественно труб, содержащее разъемный по вертикальной оси детали корпус, выполненный в виде клещевого зажима с цилиндром зажатия и охватывающих профиль детали по всему периметру шарнирно закрепленных резцов, отличающееся тем, что, с целью улучшения качества срезки грата при сварке труб и повышения производительности, оно снабжено четырьмя дополнительными...
Пристрій для вилучення облою з формових гумових виробів
Номер патенту: 646
Опубліковано: 15.12.1993
Автор: Зінченко Анатолій Іванович
МПК: B29C 37/00
Мітки: пристрій, гумових, вилучення, виробів, формових, облою
Формула / Реферат:
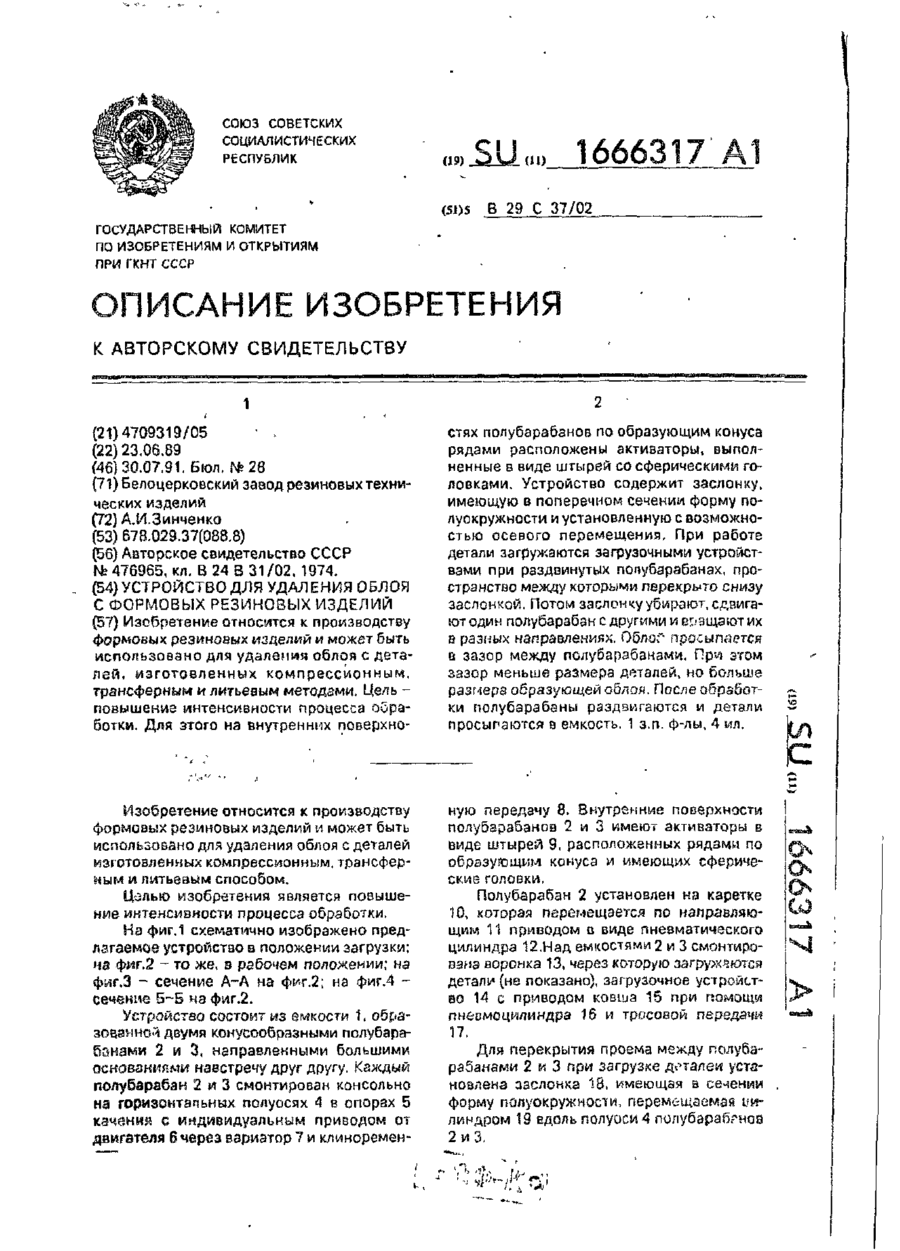
Формула изобретения1. Устройство для удаления облоя с формовых резиновых изделий, содержащее емкость, выполненную в виде двух горизонтально расположенных конусообразных полубарабанов, направленных большими основаниями навстречу друг другу, установленных соосно с возможностью вращения в противоположных направлениях, причем один из полубарабанов установлен с возможностью осевого перемещения, отличающееся тем, что, с целью повышения...
Спосіб виготовлення деталей
Номер патенту: 3032
Опубліковано: 26.12.1994
Автори: Сізьов Анатолій Миколаєвич, Цветков Арнольд Васильович, Старков Миколай Володимирович
МПК: B21D 22/12
Мітки: виготовлення, спосіб, деталей
Формула / Реферат:
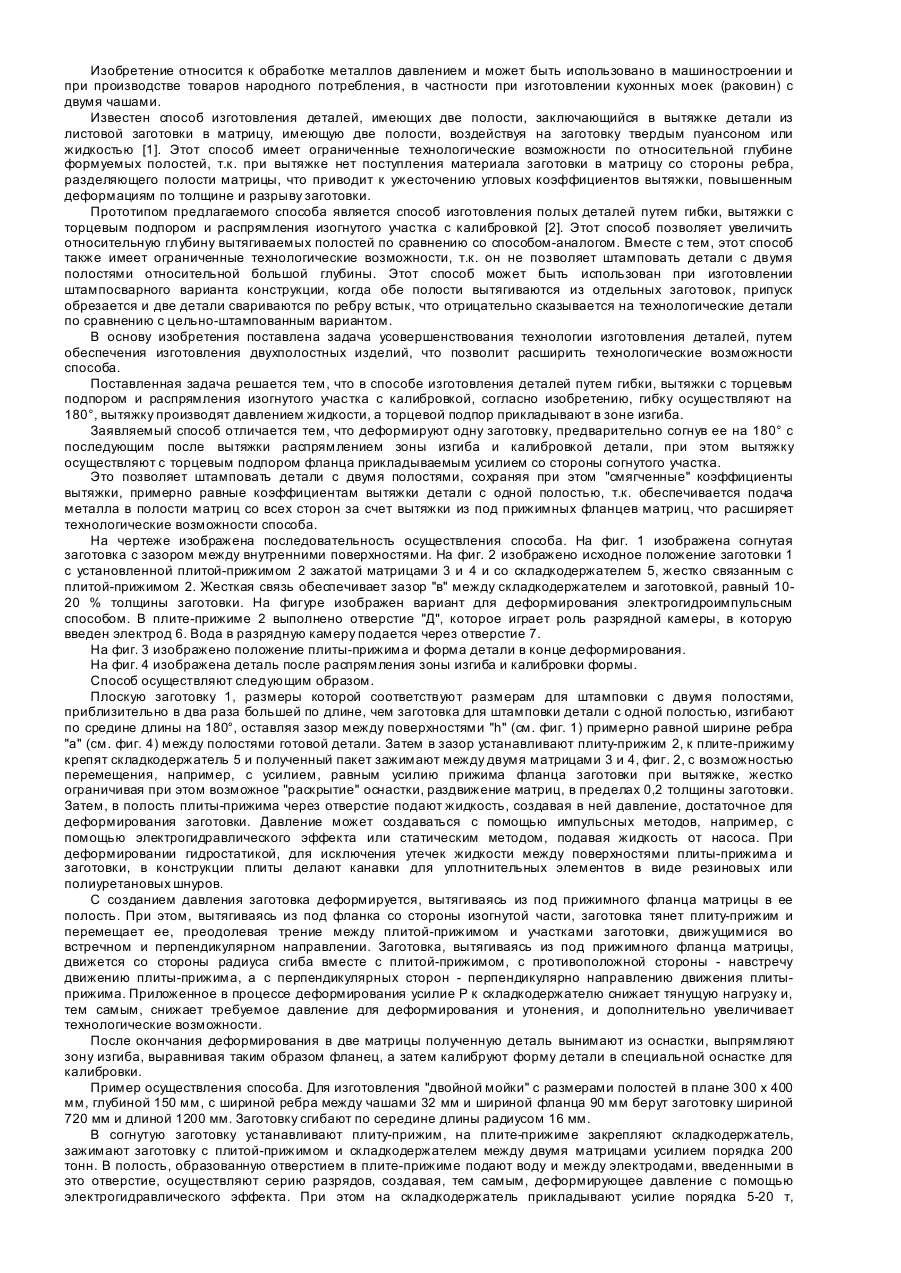
Способ изготовления деталей путем гибки, вытяжки с торцевым подпором и распрямления изогнутого участка с калибровкой, отличающийся тем, что гибку осуществляют на 180°, вытяжку производят давлением жидкости, а торцевой подпор прикладывают а зоне изгиба.
Спосіб виготовлення пружинних деталей
Номер патенту: 7452
Опубліковано: 29.09.1995
Автор: Корак Анатолій Вікторович
МПК: B21F 35/00
Мітки: деталей, пружинних, спосіб, виготовлення
Формула / Реферат:
Способ изготовления пружинных деталей путем навивки на оправку и последующей формовки с помощью фасонных многорадиусных матриц и пуансонов, отличающийся тем, что, с целью расширения технологических возможностей путем получения пружинного блока, состоящего по меньшей мере из двух однотипных пружинных элементов, формовку осуществляют в три этапа, на первом из которых формуют наружные боковые поверхности заготовки, затем производят разделение...
Попередній патент: Спосіб сейсмічної розвідки
Наступний патент: Пристрій для очищення газу від домішків
Випадковий патент: Спосіб корекції стресового компонента за умов експериментальної моделі хронічного панкреатиту