Стенд для дослідження роботи телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами
Номер патенту: 103649
Опубліковано: 25.12.2015
Формула / Реферат
1. Стенд для дослідження роботи телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами, який включає ґрунтовий контейнер, робоче обладнання у вигляді стріли та рукояті з лінійним приводом, який відрізняється тим, що стріла являє собою шарнірно-зчленовану конструкцію, верхня частина якої, а також рукоять обладнані телескопічними механізмами.
2. Стенд за п. 1, який відрізняється тим, що стріла, рукоять та робочий орган додатково обладнані тензометричними ланками, реохордовими датчиками змінного опору та електронними датчиками, а стріла та робочий орган - механізмами лінійного приводу.
3. Стенд за п. 1, який відрізняється тим, що він додатково обладнаний блоком живлення з електронним блоком керування та тензомостовим вимірювачем/реєстратором, які закріплені разом з телескопічним робочим обладнанням на спеціальній рамі окремо від ґрунтового контейнера.
Текст
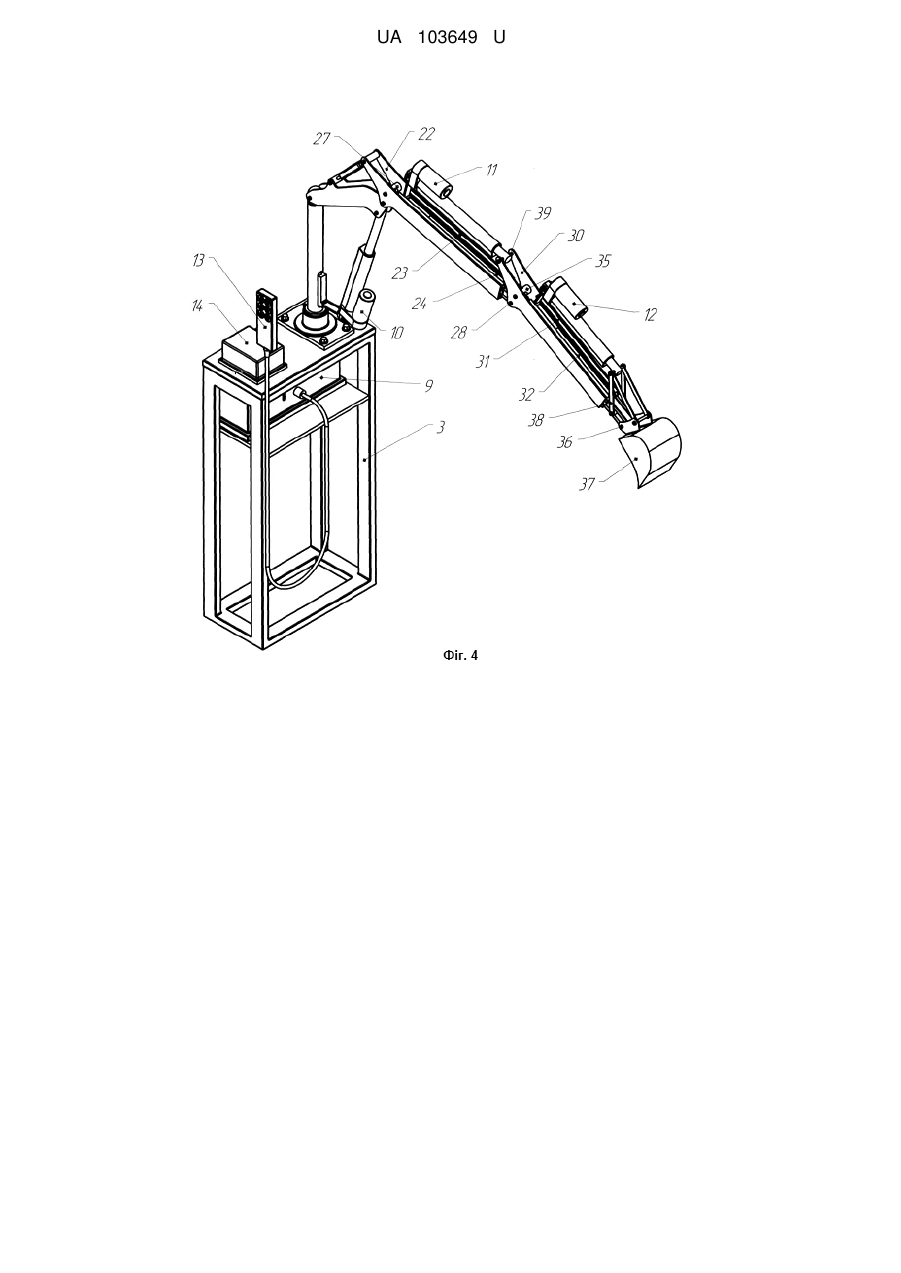
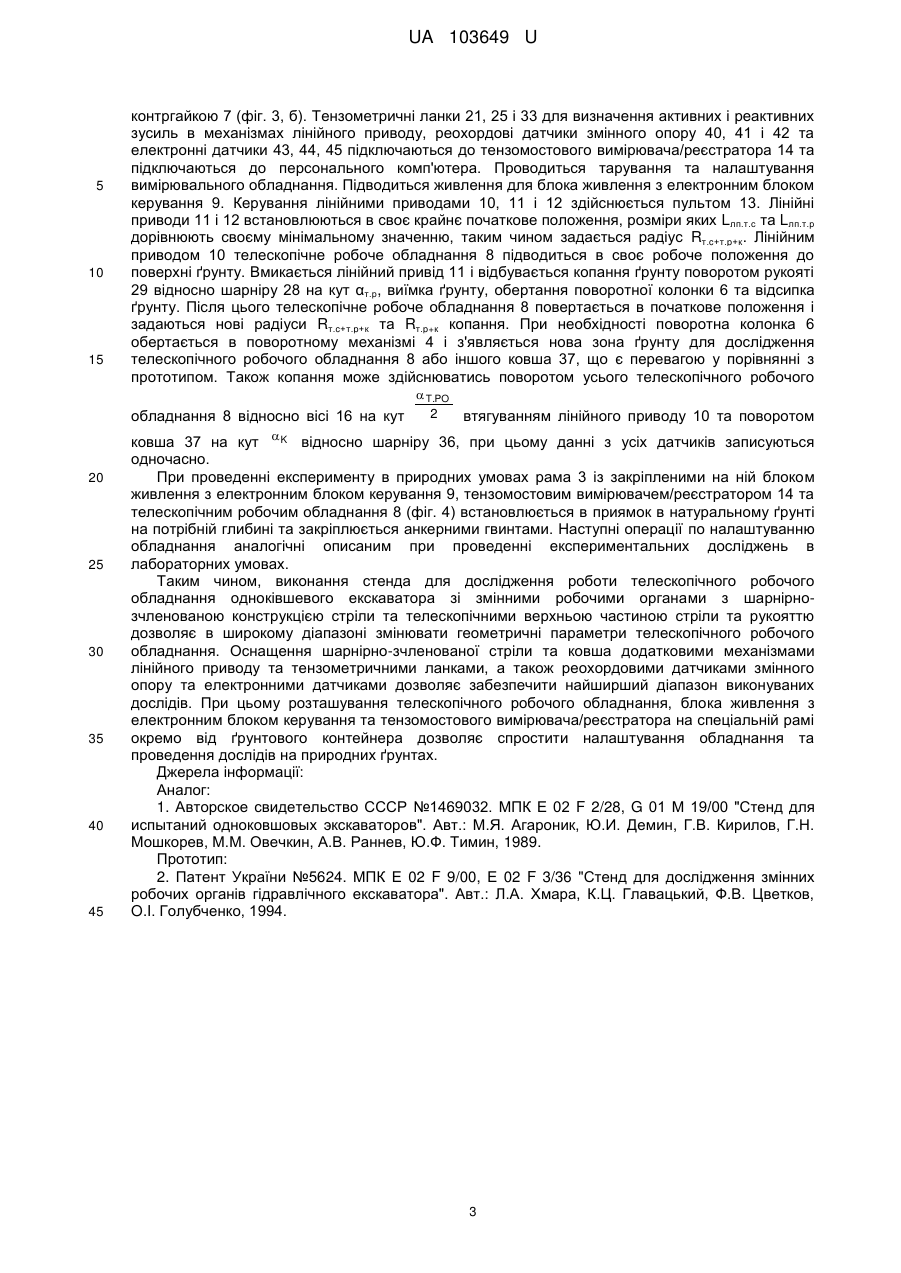
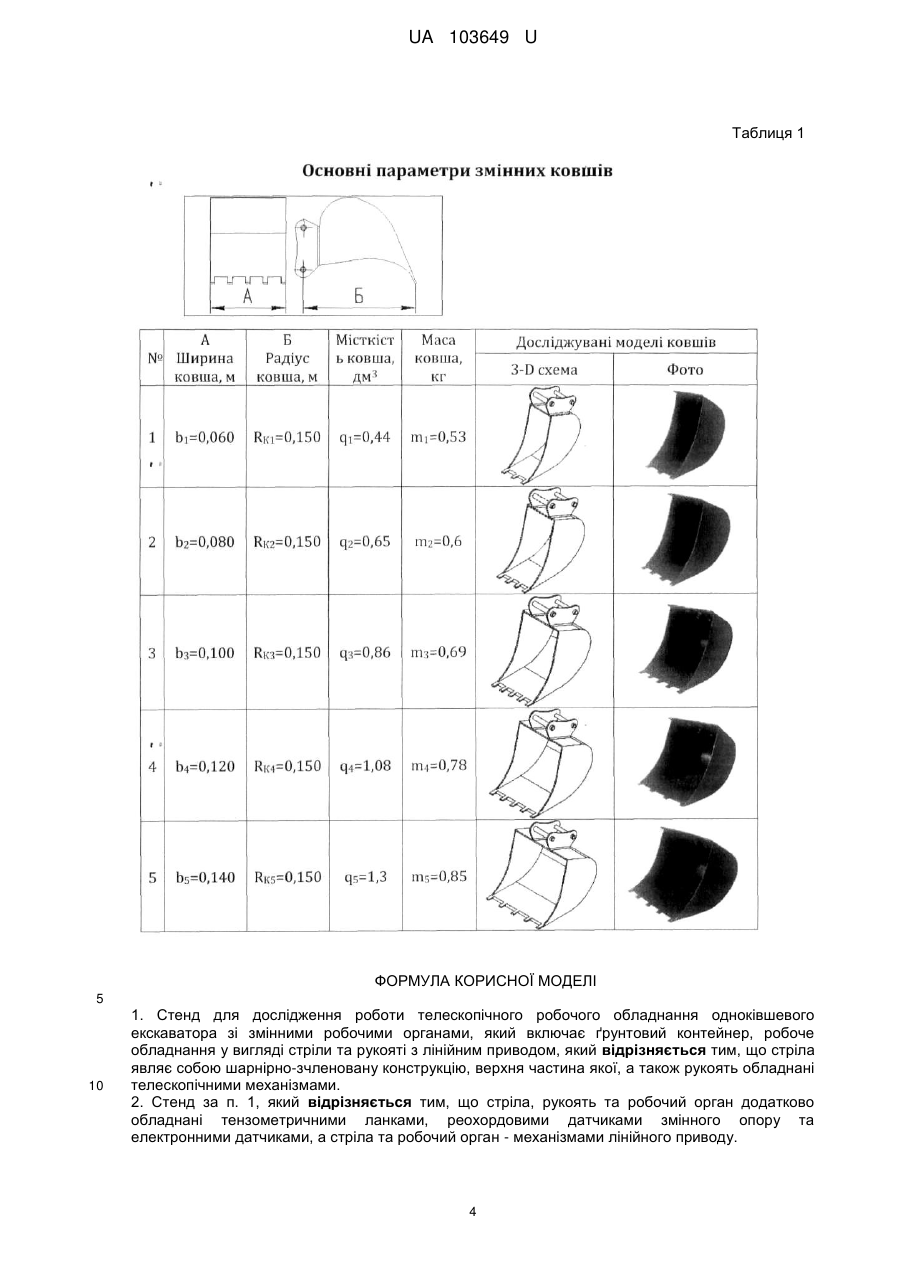
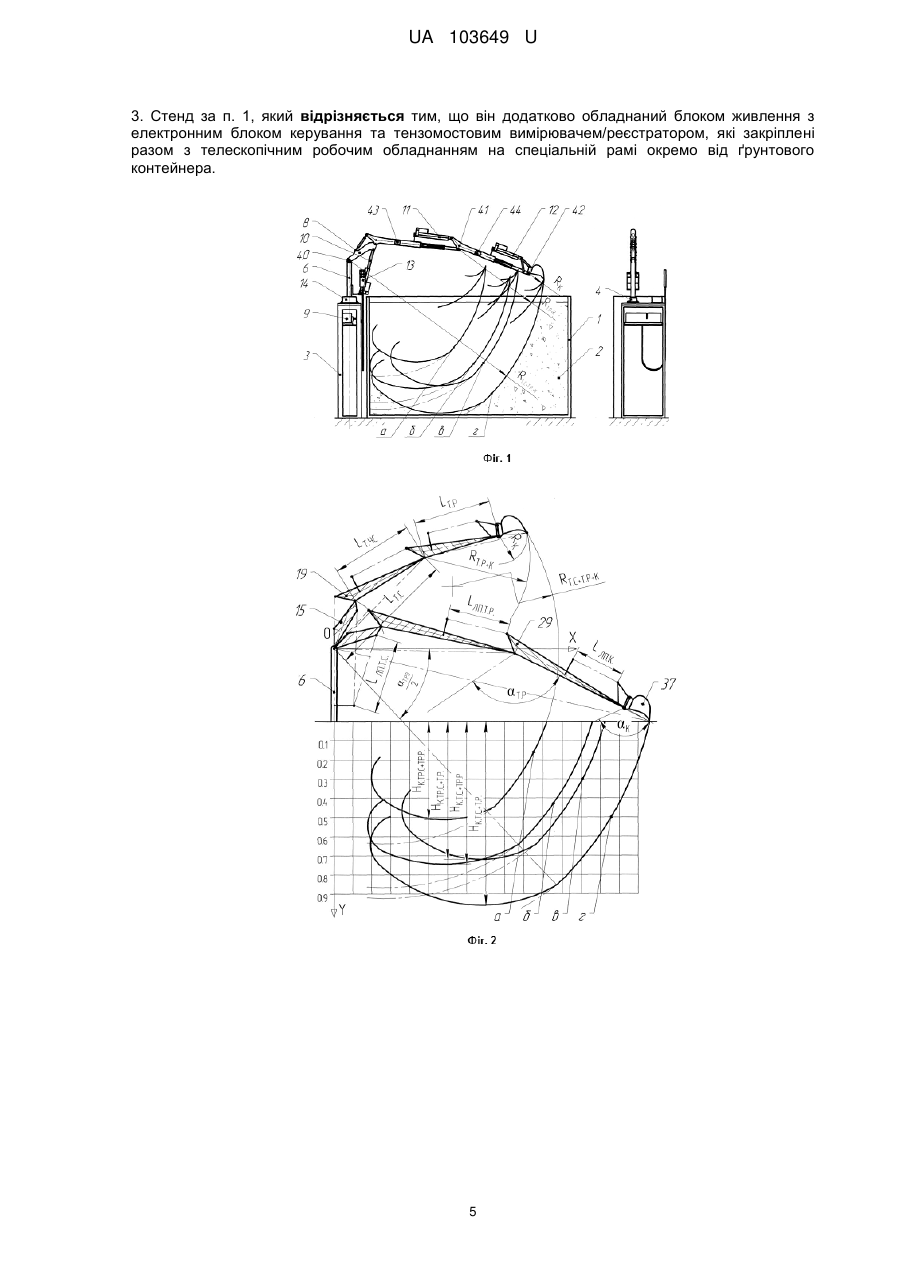
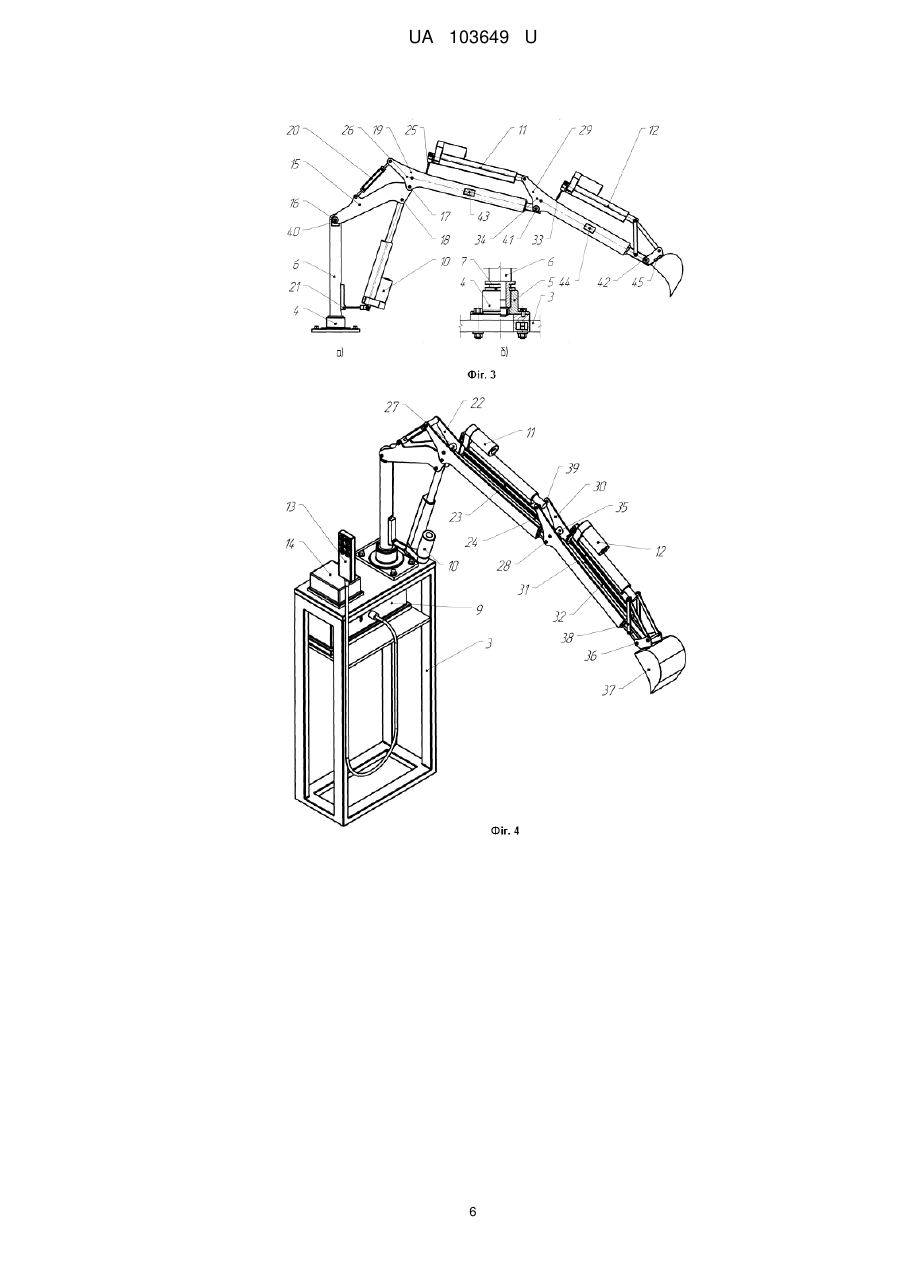
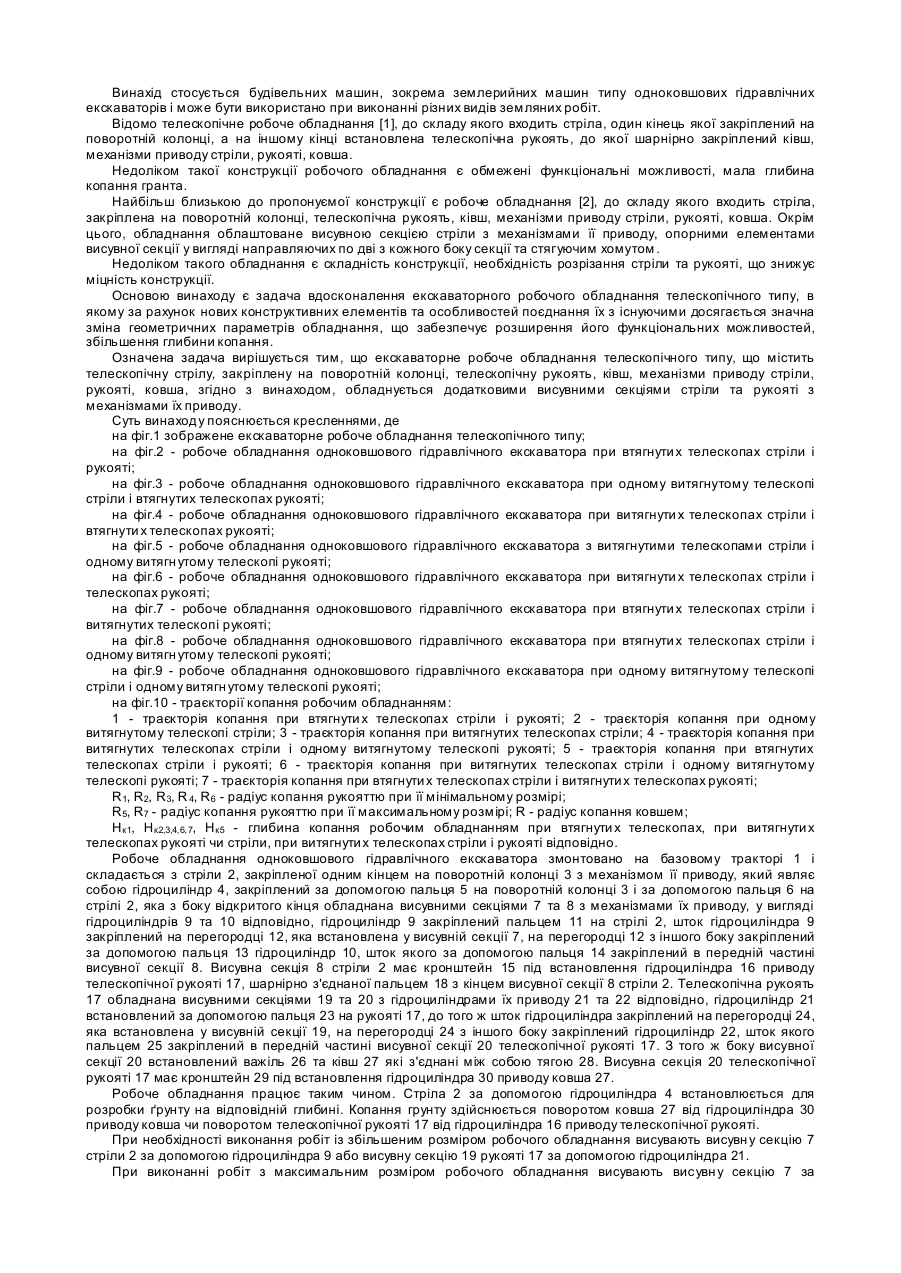
Реферат: Стенд для дослідження роботи телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами, який включає ґрунтовий контейнер, робоче обладнання у вигляді стріли та рукояті з лінійним приводом, причому стріла являє собою шарнірно-зчленовану конструкцію, верхня частина якої, а також рукоять обладнані телескопічними механізмами. UA 103649 U (12) UA 103649 U UA 103649 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель стосується обладнання для стендових досліджень процесів копання ґрунтового середовища телескопічним робочим обладнанням одноківшевого екскаватора зі змінними робочими органами. Відомо стендове обладнання для дослідження одноківшевих екскаваторів, яке включає в себе естакаду, екскаватор, робочий приямок з розміщеним в ньому навантажувальним механізмом, вимірювальну апаратуру та систему керування [1]. Недоліком аналога є те, що стендове обладнання встановлено на діючому екскаваторі, та при проведенні дослідів знижується продуктивність екскаватора за рахунок простоїв під час встановлення, регулювання, зняття датчиків, а також потрібні значні матеріальні затрати. Найбільш близьким технічним рішенням є стенд для дослідження процесу копання ґрунту ковшем екскаватора, який включає ґрунтовий контейнер, робоче обладнання зі стрілою і рукояттю та лінійний привід рукояті [2]. Недоліком прототипу є відсутність можливості змінювати геометричні параметри робочого обладнання та обмежений діапазон досліджень, які проводяться на стенді, а також складність налаштування обладнання та проведення дослідів на природних ґрунтах. Основою корисної моделі є задача вдосконалення стенда для дослідження телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами, в якому, за рахунок наявності нових конструктивних елементів, досягається суттєве розширення геометричних параметрів робочого обладнання та розширення діапазону виконуваних дослідів. Означена задача вирішується тим, що в стенді для дослідження роботи телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами, який включає ґрунтовий контейнер, робоче обладнання у вигляді стріли та рукояті з лінійним приводом, відповідно до корисної моделі стріла являє собою шарнірно-зчленовану конструкцію, верхня частина якої, а також рукоять обладнані телескопічними механізмами. При цьому стріла, рукоять та робочий орган обладнані тензометричними ланками, реохордовими датчиками змінного опору та електронними датчиками, а стріла та робочий орган - механізмами лінійного приводу. При цьому стенд обладнаний блоком живлення з електронним блоком керування та тензомостовим вимірювачем/реєстратором, які разом з телескопічним робочим обладнанням, закріплені на спеціальній рамі окремо від ґрунтового контейнера. Суть пропонованої корисної моделі пояснюється кресленнями та таблицею, де: на фіг. 1 зображена конструктивна схема стенда для дослідження роботи телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами: радіуси копання RK - ковшем, RT.P.+K. - рукояттю з виштовхнутим телескопом плюс ківш, RT.C.+T.P.+K. стрілою з виштовхнутим телескопом плюс рукоять з виштовхнутим плюс ківш; а - траєкторія копання при втягнутих телескопах стріли та рукояті; б - те саме, при втягнутому телескопі стріли та виштовхнутому телескопі рукояті; в - те саме, при виштовхнутому телескопі стріли та втягнутому телескопі рукояті; г - те саме, при виштовхнутих телескопах стріли та рукояті; на фіг. 2 - параметрична схема стенда для дослідження телескопічного робочого обладнання одноківшевого екскаватора: Нк.тр.с.+тр.р. - максимальна глибина копання при втягнутих телескопах стріли та рукояті; Нк.тр.с.+тел.р. - те саме, при втягнутому телескопі стріли та висунутому телескопі рукояті; Нк.т.с, +тр.р. - те саме, при висунутому телескопі стріли та втягнутому телескопі рукояті; Нкт.с+т.р. - те саме, при висунутих телескопах стріли та рукояті; а, б, в, г траєкторія копання, аналогічні з фіг. 1; на фіг. 3-а) схема телескопічного робочого обладнання; б) поворотний механізм; на фіг. 4 - аксонометрична проекція стенда для дослідження роботи телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами без ґрунтового контейнера; на фіг. 5 - фото фізичної моделі телескопічного робочого обладнання: а) при втягнутих телескопах стріли та рукояті; б) при виштовхнутих телескопах стріли та рукояті; в) загальний вигляд; в табл. 1 наведені основні параметри змінних ковшів. Стенд для дослідження роботи телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами (фіг. 1) включає ґрунтовий контейнер 1, виконаний у вигляді коробу зварної конструкції, в якому знаходиться ґрунтове середовище 2, раму 3, з закріпленим на верхній площині поворотним механізмом 4. Поворотний механізм 4 (фіг 3, б) являє собою різьбове з'єднання втулки з внутрішньою різьбою 5, закріпленої на рамі 3, з поворотною колонкою 6, в нижній частині якої нарізана зовнішня різьба, що забезпечує вільне обертання поворотної колонки на 360°. Фіксування поворотної колонки 6 у потрібному положенні забезпечується контргайкою 7. В верхній частині поворотної колонки 6 шарнірно закріплено телескопічне робоче обладнання 8. 1 UA 103649 U 5 10 15 20 25 30 35 40 45 50 55 60 Також на рамі 3 розташовано блок живлення з електронним блоком керування 9, які знаходяться в одному корпусі. До електронного блока керування під'єднані лінійні приводи 10, 11 і 12 телескопічного робочого обладнання 8, керування якими здійснюється за допомогою пульта 13. Також на рамі 3 розміщено тензомостовий вимірювач/реєстратор 14 (фіг. 4) для мостових та напівмостових схем вмикання тензодатчиків, дані з прибору через USB порт передаються на персональний комп'ютер. Телескопічне робоче обладнання 8 (фіг. 3, 4, 5] складається з нижньої частини стріли 15, шарнірно закріпленої на поворотній колонці 6. На нижній частині стріли 15 розташовано осі обертання 17 та 18 верхньої частини стріли 19 та штоку лінійного приводу 10, відповідно. Також на нижній частині стріли 15 розміщено стягуючий механізм 20 зміни кута між нижньою та верхньою частинами стріли. Корпус лінійного приводу 10 шарнірно закріплений на тензометричній ланці 21, яка закріплена гвинтами на поворотній колонці 6. Верхня частина стріли 19 складається з двох бокових пластин 22 (фіг. 4], на яких закріплені трисекційні телескопічні механізми 23, довжиною 360/720мм. Поміж двома телескопічними механізмами закріплено осердя 24 - прямокутну трубу перерізом 10 × 25 мм, яка забезпечує жорсткість конструкції, та тензометричну ланку 25. Тензометрична ланка 25 повторює конструкцію тензометричної ланки 21 та являє собою Г-подібний кронштейн, який складається з двох частин - верхньої, - виконаної зі сталі 45ХНФА з наклейними на неї тензорезисторами, та нижньої, - що повторює переріз осердя 24; також нижня частина тензометричної ланки має отвір діаметром 6 мм з різьбою. Виштовхування-втягування телескопічного механізму 23 відбувається за рахунок обертання шпильки 26 в різьбі тензометричної ланки 25. Вільний кінець шпильки 26 заходить в осердя 24, а на другому кінці шпилька має шестигранний переріз, та шарнірно закріплена в розпірці 27. На кінці осердя 24 розташований шарнір 28 кріплення рукояті 29. Рукоять 29 складається з двох бокових пластин 30 (фіг. 4.), на яких закріплені трисекційні телескопічні механізми 31, довжиною 300/600мм. Поміж двома телескопічними механізмами закріплено осердя 32 - прямокутну трубу перерізом 10 × 25 мм, яка забезпечує жорсткість конструкції, та тензометричну ланку 33. Тензометрична ланка 33 має аналогічну конструкцію тензометричним ланкам 21 і 25. Виштовхування-втягування телескопічного механізму 31 відбувається за рахунок обертання шпильки 34 в різьбі тензометричної ланки 33. Вільний кінець шпильки 34 заходить в осердя 32, а на другому кінці шпилька має шестигранний переріз, та шарнірно закріплена в розпірці 35. На вільному кінці осердя 32 розташований шарнір 36 кріплення робочого органа у вигляді ковша 37, а також вісь кріплення чотириланкового механізму 38. Обертання рукояті здійснюється лінійним приводом 11, шток якого шарнірно закріплений на осі-розпірці 39 рукояті, а корпус - шарнірно закріплений на тензометричній ланці 25. Обертання ковша 37 здійснюється лінійним приводом 12, шток якого шарнірно закріплений на чотириланковому механізмі 38, а корпус - шарнірно закріплений на тензометричній ланці 33. Кути повороту ковша 37 відносно осі рукояті 29, рукояті 29 відносно осі верхньої частини стріли 19 та нижньої частини стріли 15 відносно вертикальної осі поворотної колонки 6 реєструються реохордовими датчиками змінного опору 40, 41 та 42, відповідно. Датчики підключені по напівмостовій схемі та під'єднані до тензомостового вимірювача/реєстратора 14. Окрім датчиків 40, 41 та 42 верхня частина стріли, рукоять та ківш обладнані електронними датчиками 43, 44 та 45, відповідно, які являють собою 3-осьові акселерометри та 3-осьові гіроскопи для визначення магнітних та зенітних кутів, для визначення просторового позиціювання секцій телескопічного робочого обладнання та змінного робочого органу. Для всебічних досліджень процесу взаємодії з ґрунтовим середовищем телескопічного робочого обладнання одноківшевого екскаватора стенд комплектується параметричним рядом змінних ковшів, виконаних в масштабі kl=10, та який складається з п'яти ковшів, таблиця 1. Стенд для дослідження роботи телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами працює наступним чином. При проведенні експериментальних досліджень в лабораторних умовах в ґрунтовому контейнері 1 підготовлюється ґрунтове середовище 2 до потрібних показників та відповідна форма забою. Телескопічне робоче обладнання 8 налаштовується наступним чином: обертанням стягуючого механізму 20 встановлюється потрібний кут між нижньою 15 та верхньою 19 частинами стріли через вісь обертання 17. Обертанням шпильки 26 в різьбі тензометричної ланки 25 задається потрібна довжина Lт.чс трисекційного телескопічного механізму 23 верхньої частини стріли 19 та довжина шарнірно-зчленованої стріли LT.C (фіг. 2). Обертанням шпильки 34 в різьбі тензометричної ланки 33 задається потрібна довжина Lt.p трисекційного телескопічного механізму 31 рукояті 29. Встановлюється потрібний для експерименту ківш 37. Обертанням поворотної колонки 6 в поворотному механізмі 4 телескопічне робоче обладнання 8 встановлюється в потрібне положення в забої та фіксується у потрібному положенні 2 UA 103649 U 5 10 15 контргайкою 7 (фіг. 3, б). Тензометричні ланки 21, 25 і 33 для визначення активних і реактивних зусиль в механізмах лінійного приводу, реохордові датчики змінного опору 40, 41 і 42 та електронні датчики 43, 44, 45 підключаються до тензомостового вимірювача/реєстратора 14 та підключаються до персонального комп'ютера. Проводиться тарування та налаштування вимірювального обладнання. Підводиться живлення для блока живлення з електронним блоком керування 9. Керування лінійними приводами 10, 11 і 12 здійснюється пультом 13. Лінійні приводи 11 і 12 встановлюються в своє крайнє початкове положення, розміри яких Lлп.т.с та Lлп.т.р дорівнюють своєму мінімальному значенню, таким чином задається радіус Rт.c+т.p+к. Лінійним приводом 10 телескопічне робоче обладнання 8 підводиться в своє робоче положення до поверхні ґрунту. Вмикається лінійний привід 11 і відбувається копання ґрунту поворотом рукояті 29 відносно шарніру 28 на кут αт.р, виїмка ґрунту, обертання поворотної колонки 6 та відсипка ґрунту. Після цього телескопічне робоче обладнання 8 повертається в початкове положення і задаються нові радіуси Rт.c+т.p+к та Rт.p+к копання. При необхідності поворотна колонка 6 обертається в поворотному механізмі 4 і з'являється нова зона ґрунту для дослідження телескопічного робочого обладнання 8 або іншого ковша 37, що є перевагою у порівнянні з прототипом. Також копання може здійснюватись поворотом усього телескопічного робочого T.PO 2 обладнання 8 відносно вісі 16 на кут K 20 25 30 35 40 45 втягуванням лінійного приводу 10 та поворотом ковша 37 на кут відносно шарніру 36, при цьому данні з усіх датчиків записуються одночасно. При проведенні експерименту в природних умовах рама 3 із закріпленими на ній блоком живлення з електронним блоком керування 9, тензомостовим вимірювачем/реєстратором 14 та телескопічним робочим обладнання 8 (фіг. 4) встановлюється в приямок в натуральному ґрунті на потрібній глибині та закріплюється анкерними гвинтами. Наступні операції по налаштуванню обладнання аналогічні описаним при проведенні експериментальних досліджень в лабораторних умовах. Таким чином, виконання стенда для дослідження роботи телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами з шарнірнозчленованою конструкцією стріли та телескопічними верхньою частиною стріли та рукояттю дозволяє в широкому діапазоні змінювати геометричні параметри телескопічного робочого обладнання. Оснащення шарнірно-зчленованої стріли та ковша додатковими механізмами лінійного приводу та тензометричними ланками, а також реохордовими датчиками змінного опору та електронними датчиками дозволяє забезпечити найширший діапазон виконуваних дослідів. При цьому розташування телескопічного робочого обладнання, блока живлення з електронним блоком керування та тензомостового вимірювача/реєстратора на спеціальній рамі окремо від ґрунтового контейнера дозволяє спростити налаштування обладнання та проведення дослідів на природних ґрунтах. Джерела інформації: Аналог: 1. Авторское свидетельство СССР №1469032. МПК Е 02 F 2/28, G 01 М 19/00 "Стенд для испытаний одноковшовых экскаваторов". Авт.: М.Я. Агароник, Ю.И. Демин, Г.В. Кирилов, Г.Н. Мошкорев, М.М. Овечкин, А.В. Раннев, Ю.Ф. Тимин, 1989. Прототип: 2. Патент України №5624. МПК Е 02 F 9/00, Е 02 F 3/36 "Стенд для дослідження змінних робочих органів гідравлічного екскаватора". Авт.: Л.А. Хмара, К.Ц. Главацький, Ф.В. Цветков, O.I. Голубченко, 1994. 3 UA 103649 U Таблиця 1 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 1. Стенд для дослідження роботи телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами, який включає ґрунтовий контейнер, робоче обладнання у вигляді стріли та рукояті з лінійним приводом, який відрізняється тим, що стріла являє собою шарнірно-зчленовану конструкцію, верхня частина якої, а також рукоять обладнані телескопічними механізмами. 2. Стенд за п. 1, який відрізняється тим, що стріла, рукоять та робочий орган додатково обладнані тензометричними ланками, реохордовими датчиками змінного опору та електронними датчиками, а стріла та робочий орган - механізмами лінійного приводу. 4 UA 103649 U 3. Стенд за п. 1, який відрізняється тим, що він додатково обладнаний блоком живлення з електронним блоком керування та тензомостовим вимірювачем/реєстратором, які закріплені разом з телескопічним робочим обладнанням на спеціальній рамі окремо від ґрунтового контейнера. 5 UA 103649 U 6 UA 103649 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: роботи, телескопічного, змінними, дослідження, стенд, обладнання, робочими, робочого, екскаватора, органами, одноківшевого
Код посилання
<a href="https://ua.patents.su/9-103649-stend-dlya-doslidzhennya-roboti-teleskopichnogo-robochogo-obladnannya-odnokivshevogo-ekskavatora-zi-zminnimi-robochimi-organami.html" target="_blank" rel="follow" title="База патентів України">Стенд для дослідження роботи телескопічного робочого обладнання одноківшевого екскаватора зі змінними робочими органами</a>
Робоче обладнання одноківшевого екскаватора
Номер патенту: 75318
Опубліковано: 26.11.2012
Автори: Дахно Олег Олександрович, Хмара Леонід Андрійович
МПК: E02F 3/28
Мітки: екскаватора, робоче, одноківшевого, обладнання
Формула / Реферат:
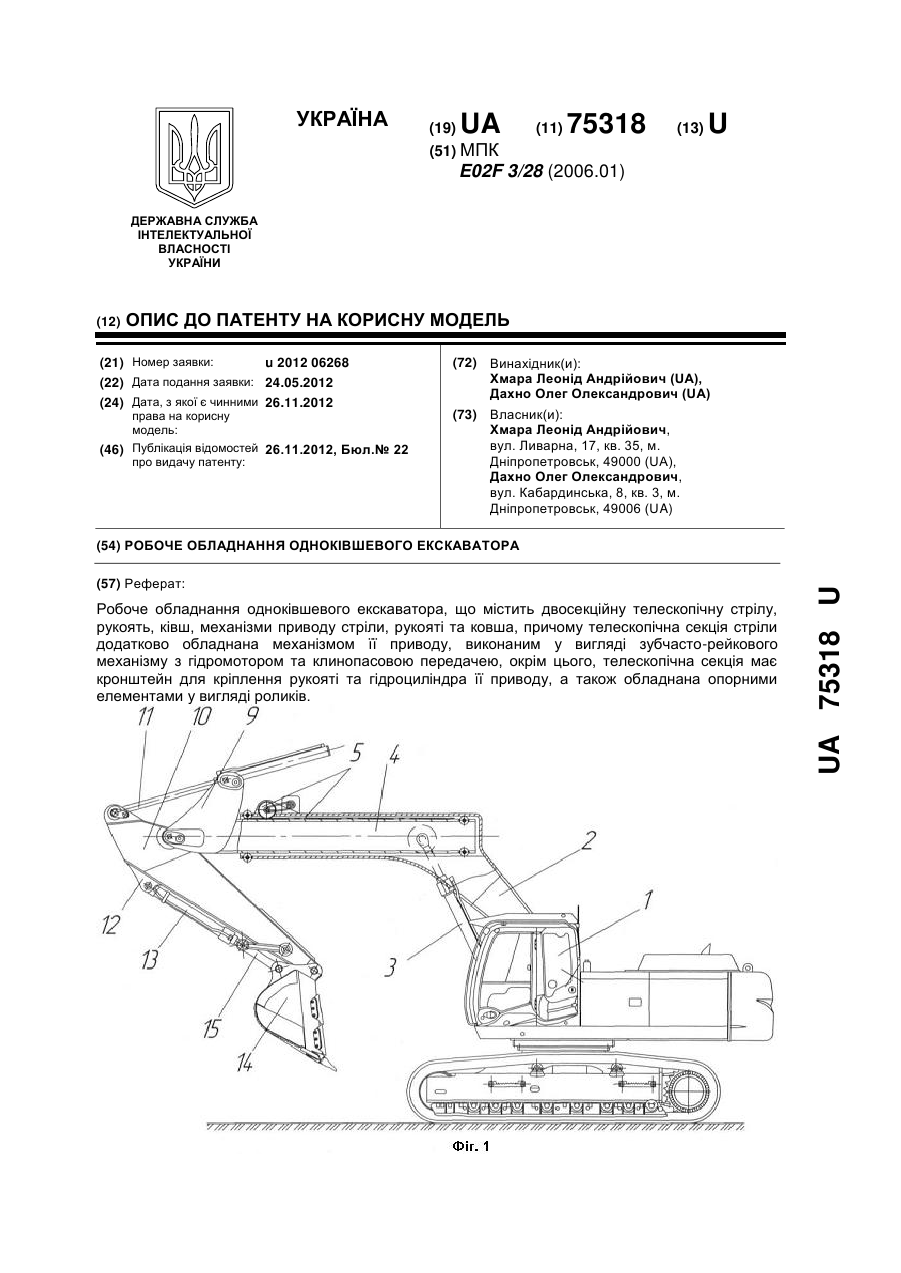
Робоче обладнання одноківшевого екскаватора, що містить двосекційну телескопічну стрілу, рукоять, ківш, механізми приводу стріли, рукояті та ковша, яке відрізняється тим, що телескопічна секція стріли додатково обладнана механізмом її приводу, виконаним у вигляді зубчасто-рейкового механізму з гідромотором та клинопасовою передачею, окрім цього, телескопічна секція має кронштейн для кріплення рукояті та гідроциліндра її приводу, а також...
Робоче обладнання одноківшевого екскаватора з телескопічною рукояттю
Номер патенту: 101091
Опубліковано: 25.08.2015
Автори: Дахно Олег Олександрович, Хмара Леонід Андрійович
МПК: E02F 3/28
Мітки: телескопічною, одноківшевого, рукояттю, екскаватора, робоче, обладнання
Формула / Реферат:
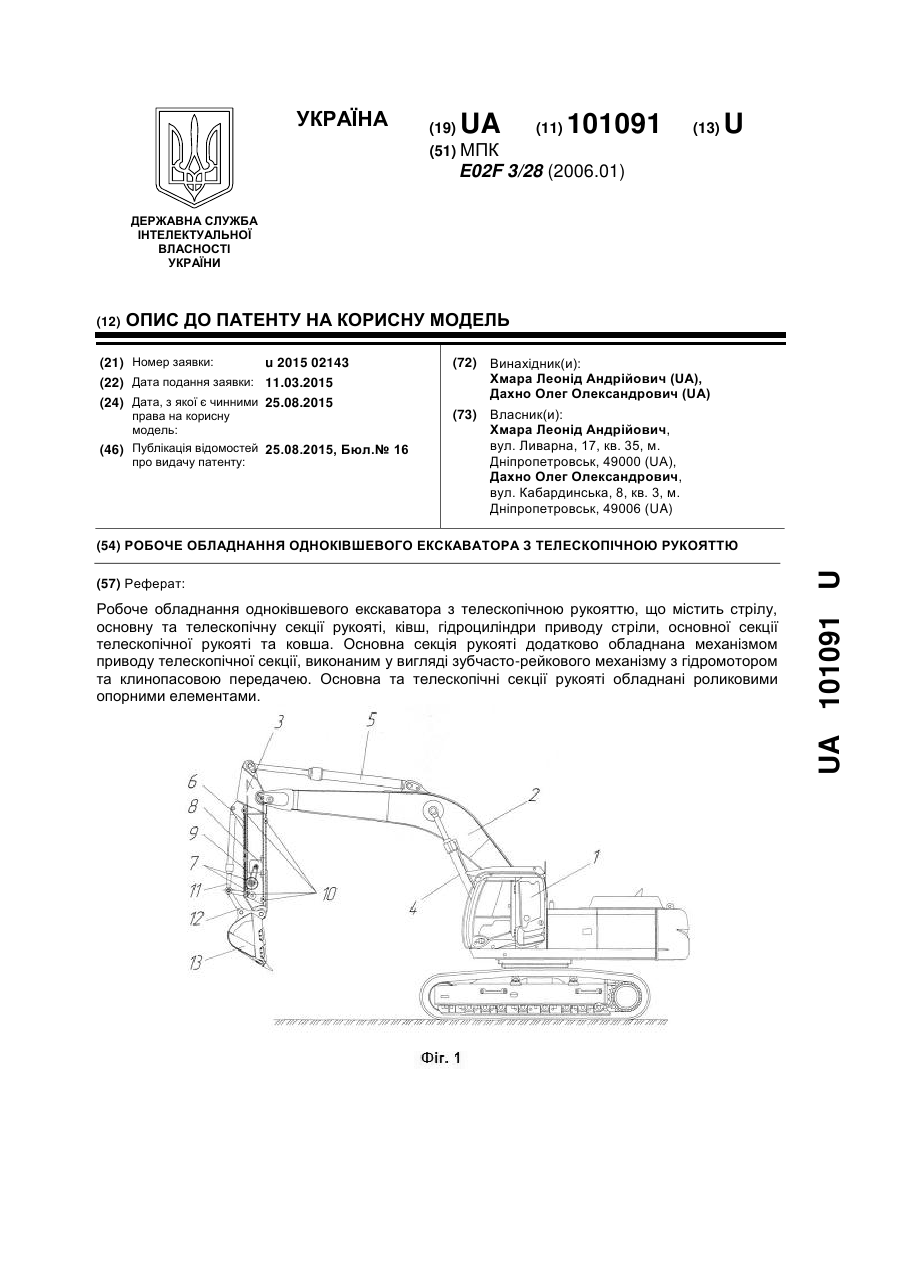
Робоче обладнання одноківшевого екскаватора з телескопічною рукояттю, що містить стрілу, основну та телескопічну секції рукояті, ківш, гідроциліндри приводу стріли, основної секції телескопічної рукояті та ковша, яке відрізняється тим, що основна секція рукояті додатково обладнана механізмом приводу телескопічної секції, виконаним у вигляді зубчасто-рейкового механізму з гідромотором та клинопасовою передачею, при цьому основна та...
Робоче обладнання активної дії одноківшевого екскаватора
Номер патенту: 68558
Опубліковано: 26.03.2012
Автори: Мельниченко Богдан Миколайович, Пелевін Леонід Євгенійович, Рашківський Володимир Павлович
МПК: E02F 5/30
Мітки: обладнання, робоче, одноківшевого, екскаватора, дії, активної
Формула / Реферат:
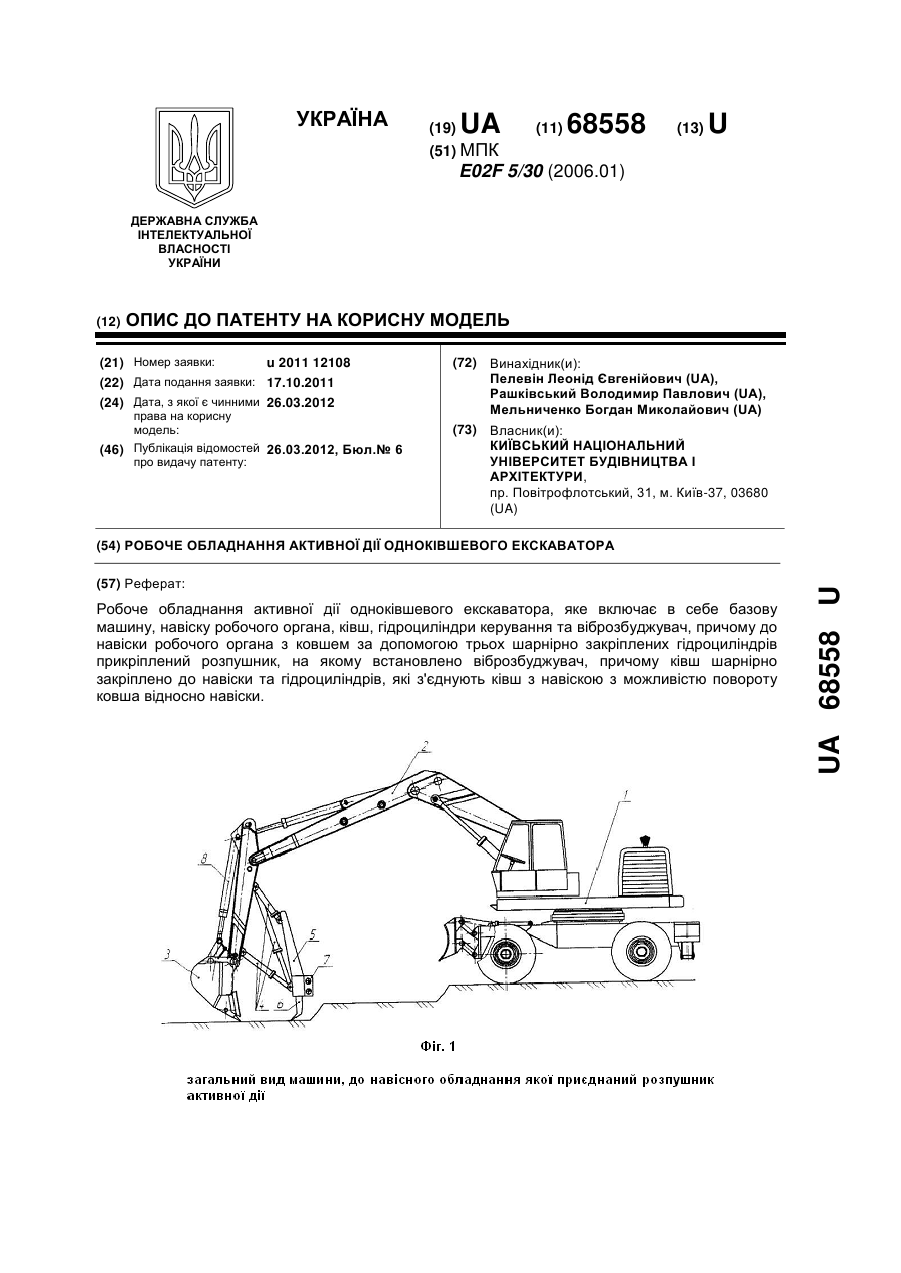
Робоче обладнання активної дії одноківшевого екскаватора, яке включає в себе базову машину, навіску робочого органа, ківш, гідроциліндри керування та віброзбуджувач, яке відрізняється тим, що до навіски робочого органа з ковшем за допомогою трьох шарнірно закріплених гідроциліндрів прикріплений розпушник, на якому встановлено віброзбуджувач, причому ківш шарнірно закріплено до навіски та гідроциліндрів, які з'єднують ківш з навіскою з...
Екскаваторне робоче обладнання телескопічного типу
Номер патенту: 65783
Опубліковано: 15.04.2004
Автори: Соколов Ігор Анатолійович, Хмара Леонід Андрійович, Сухий Сергій Борисович
МПК: E02F 3/36
Мітки: телескопічного, обладнання, типу, екскаваторне, робоче
Формула / Реферат:
Екскаваторне робоче обладнання телескопічного типу, що містить телескопічну стрілу, закріплену на поворотній колонці, телескопічну рукоять, ківш, механізми приводу стріли, рукояті, ковша, яке відрізняється тим, що воно додатково обладнане висувною секцією стріли з механізмом її приводу та додатковою висувною секцією рукояті з механізмом її приводу.
Робоче обладнання одноковшового гідравлічного екскаватора
Номер патенту: 43969
Опубліковано: 15.01.2002
Автори: Уріх Євген Йосипович, Коваленко Руслан Вікторович, Соколов Ігор Анатолійович, Хмара Леонід Андрійович
МПК: E02F 3/28
Мітки: одноковшового, гідравлічного, робоче, обладнання, екскаватора
Формула / Реферат:
Робоче обладнання одноківшового гідравлічного екскаватора, що містить стрілу, закріплену на поворотній колонці, телескопічну рукоятку, ківш, механізми приводу стріли, рукоятки ковша, яке відрізняється тим, що воно додатково обладнане висувною секцією стріли з механізмом її приводу, опорними елементами висувної секції, у вигляді напрямних, по дві з кожного боку секції, упорами та стягуючим хомутом.
Попередній патент: Спосіб улаштування енергозберігаючого конструктивного вузла “зовнішні сходи – плита перекриття – зовнішня стіна”
Наступний патент: Апарат ультразвукової терапії
Випадковий патент: Хліборізальна машина