Промисловий робот


Текст
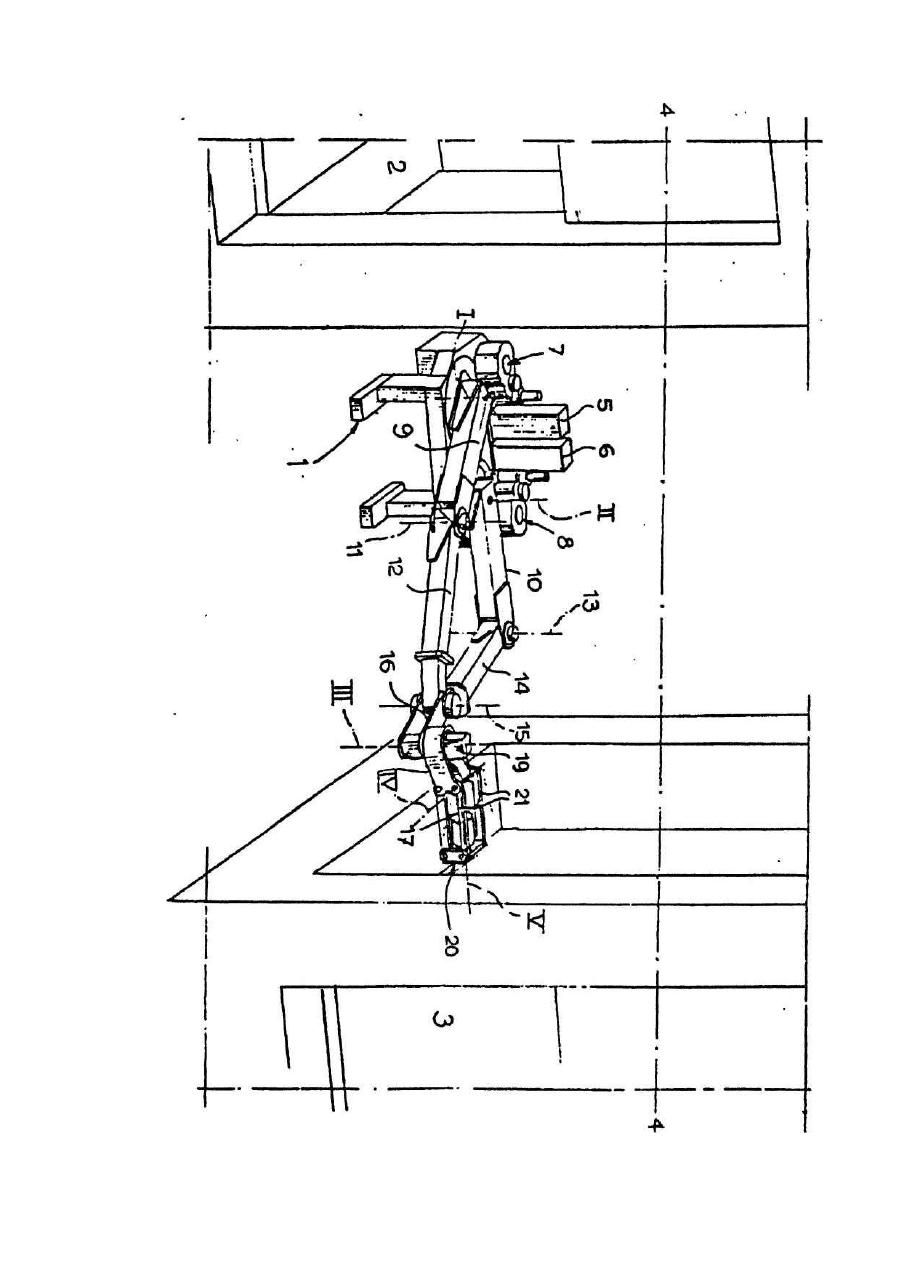
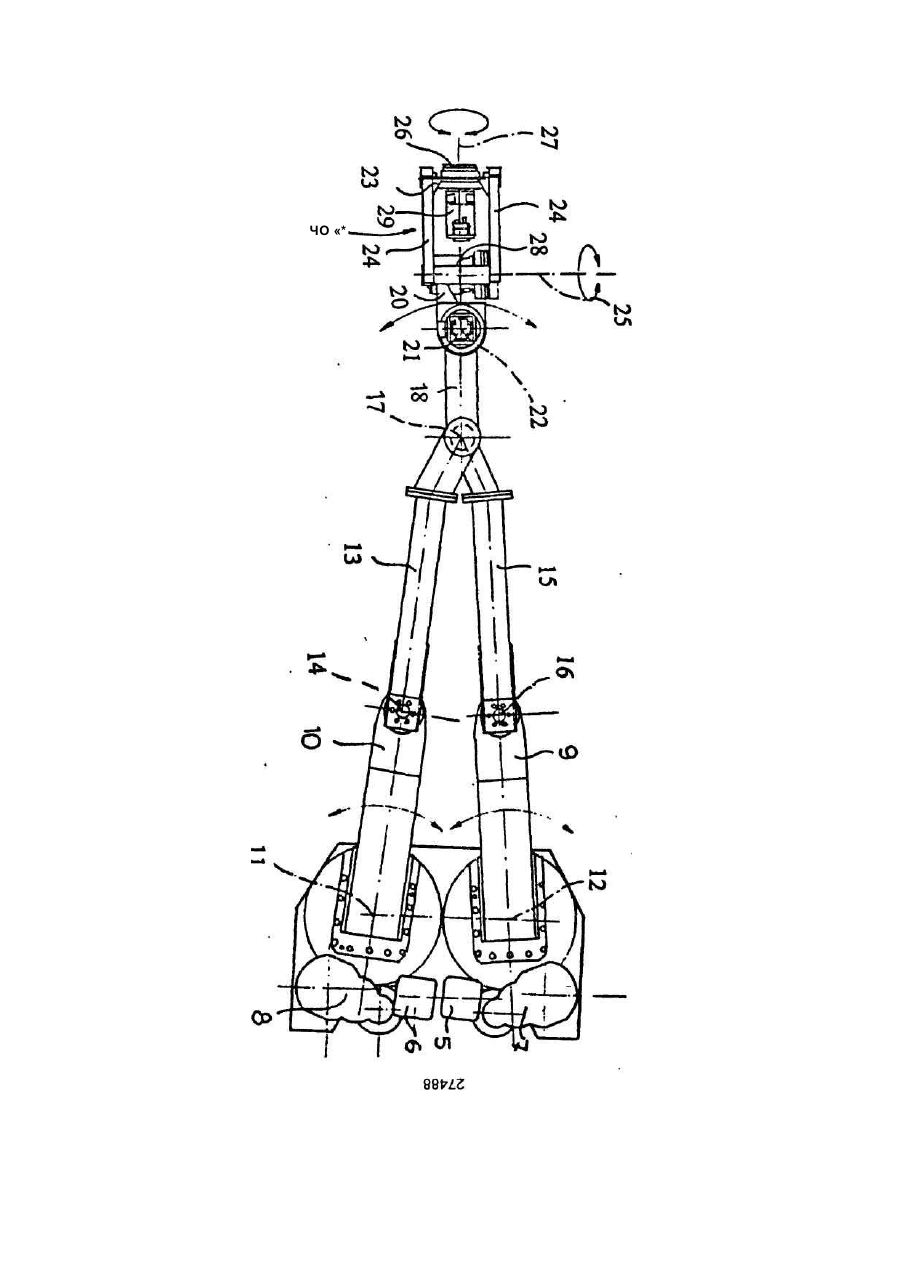
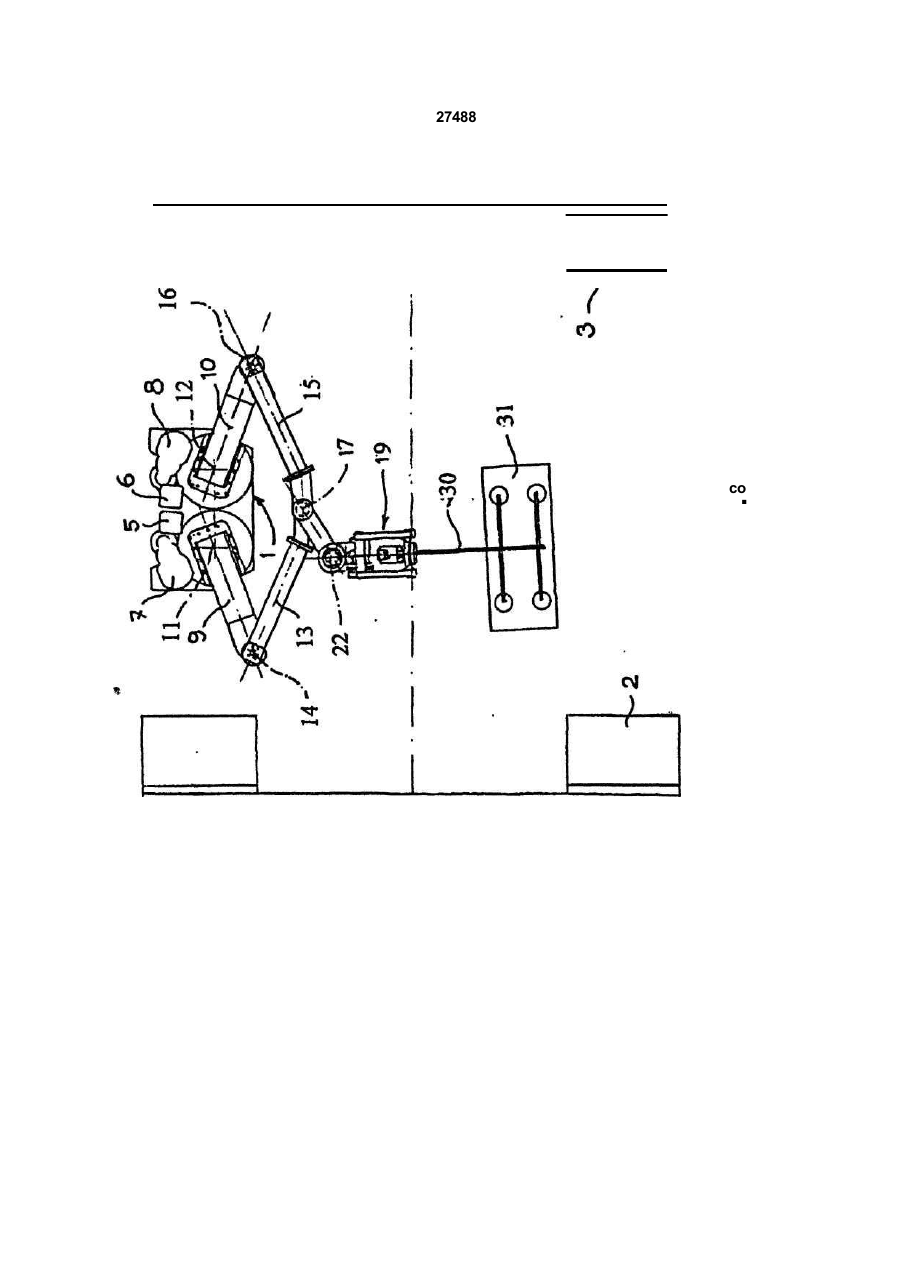
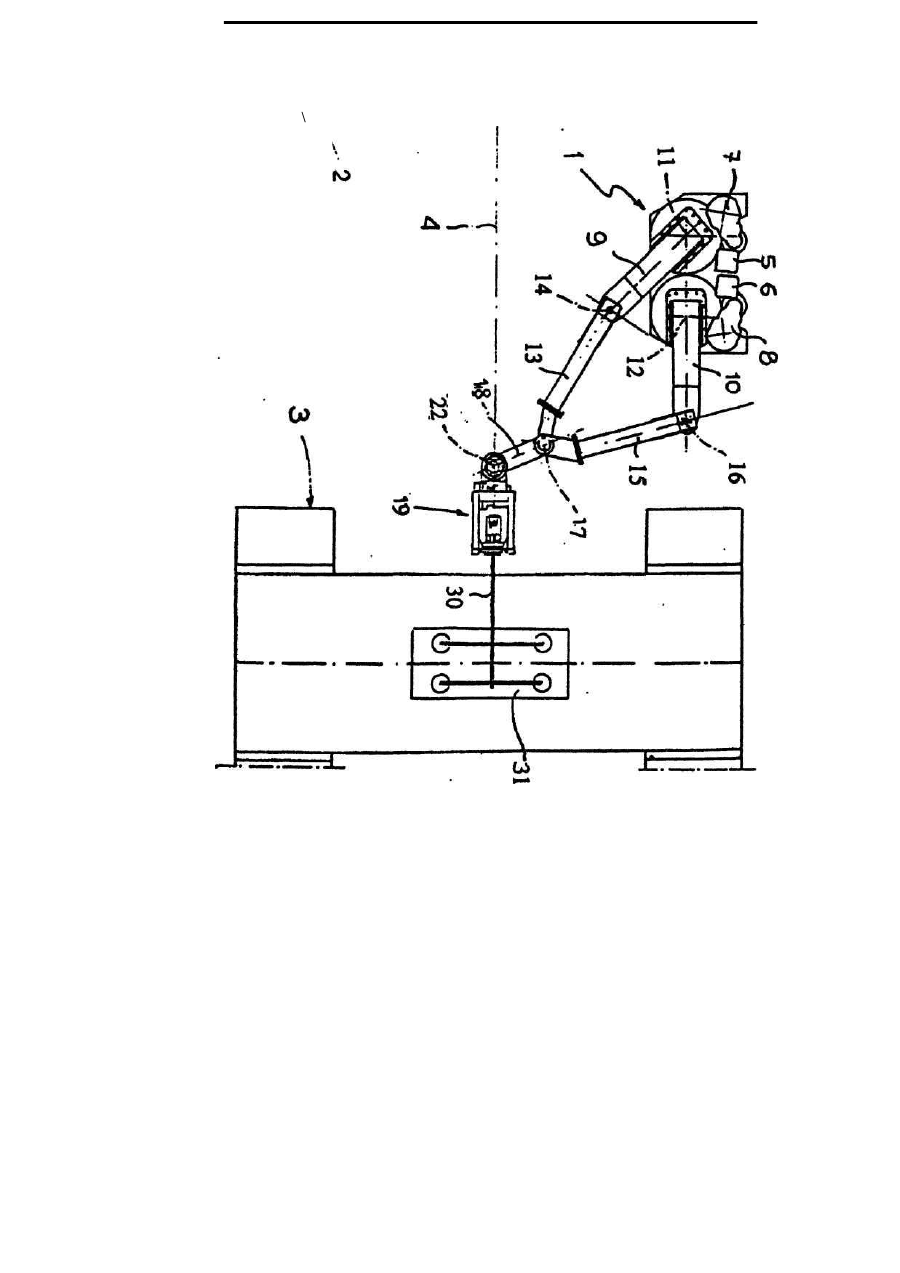
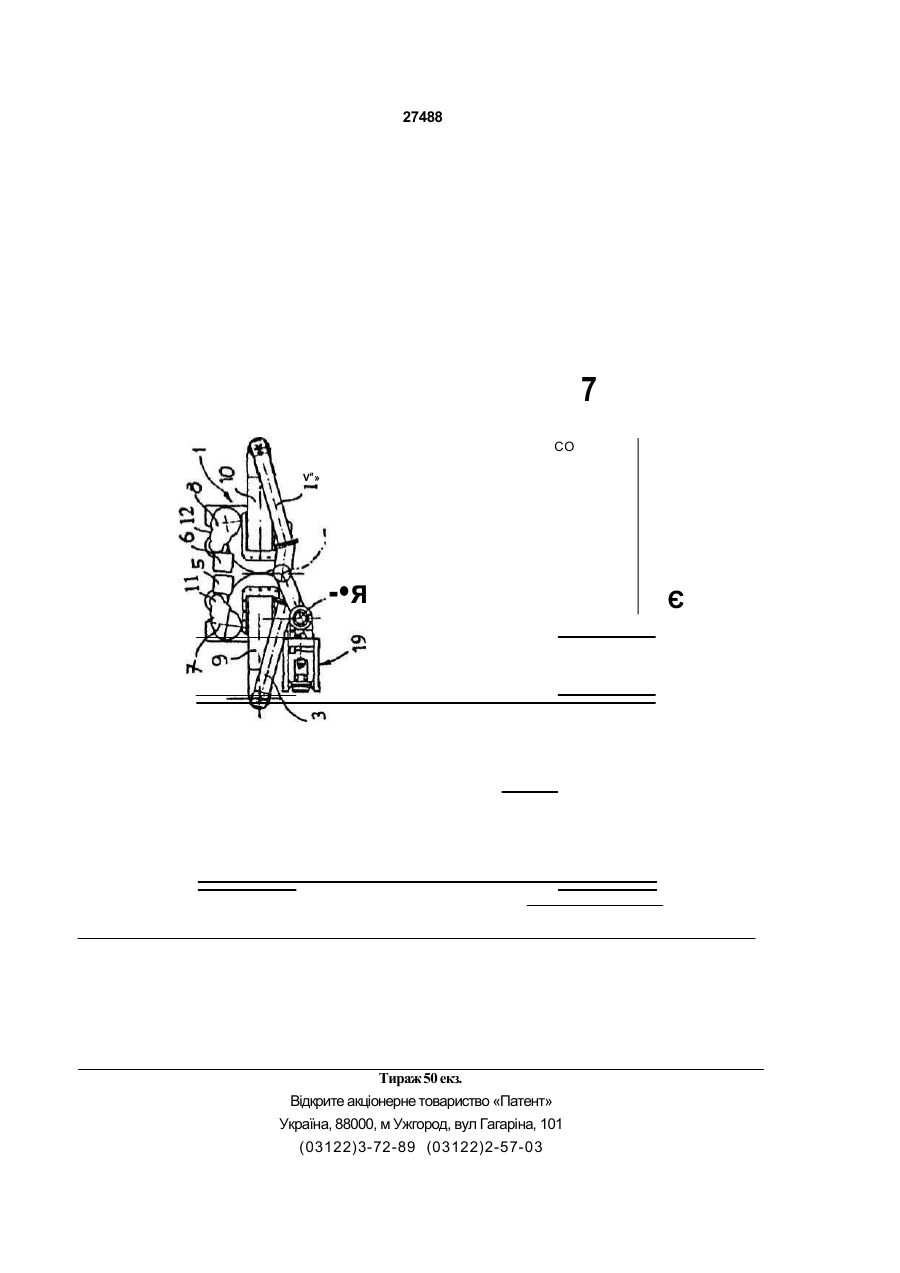
1. Промышленный робот, содержащий осно вание, установленные на нём два двигателя с понижающими передачами, соединённые с ними два манипулятора с возможностью вращения соответственно вокруг первой и второй осей, причём оси параллельны и расположены на расстоянии одна от другой, два предплечья, шарнирно сочленённые одними концами с манипуля торами с возможностью вращения вокруг третьей и четвёртой осей, параллельных первой и второй осям вращения манипуляторов, и шарнирно сочленённые противоположными концами с воз можностью вращения вокруг общей пятой оси, параллельной первой и второй осям вращения манипуляторов, удлинитель, присоединенный одним концом к предплечью, отличающийся тем, что введено запястье, соединённое со вто рым концом удлинителя, содержащее первый элемент, снабжённый двигателем с понижающей передачей, с возможностью вращения вокруг шестой оси, параллельной первой и второй осям вращения манипуляторов, второй элемент, установленный с возможностью перемещения относительно первого элемента в направлении параллельном шестой оси врашения первого элемента. 2. Робот по п 1, отличающийся тем, что второй элемент запястья соединён с первым элементом запястья рычажным механизмом в виде паралле лограмма, седьмая ось шарнирного сочленения которого перпендикулярна ш^той оси вращения первого элемента 3. Робот по п 2, отличающийся тем, что рьмажный механизм содержит верхний и нижний рыча ги, расположенные в первой плоскости, параллель ной шестой оси вращения первого элемента, и до полнительный .рычаг, расположенный во второй плоскости, параллельной первой, и объединённый с верхним рычагом с образованием единого каркаса. 4. Робот по п. 2, отличающийся тем, что он до полнительно имеет фланец, который опирается на второй элемент, установленный с возмож ностью вращения вокруг восьмой оси, перпенди кулярной седьмой оси вращения рычажного ме ханизма. 5. Робот по любому из предшествующих пунктов, отличающийся тем, что по меньшей мере один из манипуляторов или, по меньшей мере, одно из предплечий выполнено регулируемым по длине. 6. Промышленный робот по п. 1, отличающийся тем, что используется в линии прессов для пере мещения заготовок от одного пресса к другому. Изобретение относится к промышленным роботам. Из патента США (1)"Регупируемый механизм робота" известен робот, содержащий: неподвижное основание с установленным на нём подвижным основанием, на котором смонтированы два двигателя с понижающими передачами, соединёнными с ними парой манипуляторов, двух предплечий одними своими концами соединённых с манипуляторами, а другими между собой. Манипуляторы установлены с возможностью вращения каждый вокруг своей оси, причём оси параллельны и расположены на расстоянии одна от другой, предплечья в местах присоединения к манипуляторам и между собой также имеют возможность вращаться вокруг осей, параллельных осям вращения манипуляторов. К предплечьям одним концом присоединён удлинитель. Подвижное основание установлено с возможностью перемещения в вертикальном направлении по винтовому шпинделю, установленному на неподвижном основании. Одним из недостатков робота по упомянутому патенту является то, что его конструкция о 00 00 см 27488 предусматривает перемещение не только манипуляторов, предплечий и других элементов, непосредственно связанных с исполнительным механизмом робота, а и подвижного основания с установленными на нём двигателями, понижающими передачами, которые обладают значительной массой и требуют для своего перемещения дополнительных затрат энергии. Перемещение подвижного основания робота в вертикальном направлении по винтовому шпинделю со всеми упомянутыми элементами конструкции, смонтированными на подвижном основании, не обеспечивает плавность и ограничивает скорость перемещения исполнительного механизма робота. Значительные механические нагрузки, возникающие при перемещении массы подвижного основания по винтовому шпинделю, снижают точность воспроизведения требуемых траекторий исполнительного механизма. Количество возможных вариантов траекторий исполнительного механизма робота у прототипа меньше, чем у робота по заявленному техническому решению, так как исполнительный механизм робота у прототипа имеет четыре степени свободы, а по заявленному техническому решению - пять степеней свободы движения, что обеспечивает более высокую функциональную гибкость. Недостатком конструкции робота по прототипу является также сложность герметизации винтового шпинделя по сравнению с герметизацией поворотных сочленений. Это особенно существенно при работе в условиях загрязнённой среды, где нарушения точности выполнения операций роботом по упомянутой причине могут быть весьма значительны. 8 основу изобретения поставлена задача создания усовершенствованного промышленного робота, обеспечивающего высокую функциональную гибкость, увеличение возможности обеспечения широкого спектра траекторий, в широком диапазоне скоростей, с высокой точностью выполнения заданной программы движения исполнительного механизма. Достижение требуемого технического результата обеспечивается управлением манипуляторами робота двумя независимыми приводами, расположенными на общем неподвижном основании, позволяющими широкий выбор положений и скорости, связанных с ними манипуляторов, конструкцией запястья, обеспечивающего плавное перемещение по заданным траекториям с шестью степенями свободы. Конструкция предлагаемого промышленного робота обеспечивает сокращение его массы по сравнению с прототипом. Трубчатая форма манипуляторов и предплечий обеспечивает лёгкую, недорогую в изготовлении, жёсткую конструкцию. Поставленная задача решается тем, что промышленный робот содержит основание, установленные на нём два двигателя с понижающими передачами, соединённые с ними два манипулятора с возможностью вращения вокруг первой и второй осей, причём оси параллельны и расположены на расстоянии одна от другой, два предплечья, шарнирно сочленённые одними концами с манипуляторами с возможностью вращения вокруг третьей и четвёртой осей, параллельных первой и второй осям вращения манипуляторов, и шарнирно сочленённые противоположными концами с возможностью вращения вокруг общей пятой оси, параллельной первой и второй осям вращения манипуляторов, удлинитель, присоединённый одним концом к предплечью, причём, в соответствии с изобретением, дополнительно имеет запястье, соединённое со вторым концом удлинителя, содержащее первый элемент, снабжённый двигателем с понижающей передачей, с возможностью вращения вокруг шестой оси, параллельной первой и второй осям вращения манипуляторов, второй элемент, установленный с возможностью перемещения относительно первого элемента в направлении параллельном шестой оси вращения, понижающей передачи первого элемента. Для обеспечения движения запястья в направлении параллельном шестой оси вращения запястья целесообразно его снабжение рычажным механизмом в виде параллелограмма (далее рычажный механизм), в котором имеется седьмая ось шарнирного сочленения запястья, перпендикулярная шестой оси. Предпочтительно жёсткость конструкции запястья может обеспечиваться рычажным механизмом, содержащим верхний и нижний рычаги, расположенные в плоскости, параллельной шестой оси, а также дополнительный рычаг, который параллелен указанной плоскости, расположен вне её и объединён с верхним рычагом так, что образует единый жёсткий каркас. Для расширения возможностей выбора траекторий движения желательна установка в запястье фланца с возможностью вращения вокруг восьмой оси, перпендикулярной седьмой оси вращения шарнирного сочленения рычажного механизма. Желательно один из манипуляторов, или одно из предплечий выполнить регулируемыми по длине, что обеспечит увеличение вариантов траекторий перемещения исполнительного механизма робота. Одним из предпочтительных вариантов осуществления изобретения является его использование для перемещения грузов в виде заготовок в линии прессов. Использование изобретения в линии прессов для передачи заготовок от одного пресса к другому поясняется следующими чертежами: фигура 1 - схематическое изображение в перспективе робота, выполненного в соответствии с предпочтительным вариантом осуществления изобретения, фигура 2 - робот, показанный на фигуре 1, вид сверху, w фигуры 3, 4 и 5 - робот, показанный на фигуре 1, в трёх различных рабочих положениях, вид сверху. Промышленный робот (см. фиг. 1) состоит из: неподвижного основания - 1, расположенного в пространстве между прессами 2 и 3 с одной стороны оси 4, вдоль которой расположены прессы 2 и 3, на основании 1 расположены электродвигатели 5 и 6 с понижающими передачами 7 и 8, соединёнными соответственно с манипуляторами 9 и 10, с возможностью вращения манипуля 27488 тора 9 вокруг оси 11 (первая ось), а манипулятора 10 вокруг оси 12 (вторая ось), манипулятор 9 соединён с предплечьем 13 с возможностью вращения вокруг оси 14 (третья ось), а манипулятор 10 соединён с предплечьем 15 с возможностью вращения вокруг оси 16 (четвёртая ось), предплечья 13 и 15 соединены с возможностью вращения вокруг общей оси 17 (пятая ось), удлинитель 18 одним концом соединен с предплечьями 13 и 15, а другим концом с запястьем 19. Запястье 19 содержит первый элемент 20, соединённый с понижающей передачей 21 с возможностью вращения вокруг оси 22 (шестая ось), и второй элемент 23, соединённый посредством рычагов 24 с первым элементом 20 с возможностью вращения рычагов 24 вокруг оси 25 (седьмая ось). Рычажный механизм образован двумя парами рычагов 24. Каждая пара содержит верхний и нижний рычаги, расположенные в вертикальных плоскостях по обеим сторонам удлинителя 18. Фланец 26 (фиг. 2) прикреплён к элементу 23 с возможностью вращения вокруг оси 27 (восьмая ось), перпендикулярной оси 25. Вращение рычагов 24 вокруг оси 25 обеспечивается двигателем с понижающей передачей 28, а вращение фланца 26 вокруг оси 27 обеспечено двигателем с понижающей передачей 29. К фланцу 26 присоединена державка 30, посредством которой захватывается перемещаемая заготовка 31. Первый элемент 20 может быть выполнен в виде хомута, скобы или любой другой формы, обеспечивающей соединение понижающей передачи 21 со вторым элементом 23 посредством рычагов 24. Второй элемент 23 может быть выполнен в виде пластины или другой формы, обеспечивающее профильное или другое соединение с рычагами 24. Манипуляторы 9, 10 и/или предплечья 13,15 можно выполнить регулируемыми по длине, для чего могут быть использованы, например, передачи винт-гайка (на фиг. не указаны). Промышленный робот действует следующим образом- двигатели 5 и 6 приводят в движение понижающие передачи 7 и 8, непосредственно связанные с манипуляторами 9 и 10, положение которых в процессе перегрузки грузов задаётся заранее выбранной программой, ею же определяется положение соединённых с манипуляторами 9 и 10 предплечий 13 и 15, предплечья 13 и 15 при своём движении определяют положение в пространстве общей для них оси 22 и связанного с той осью удлинителя 18, удлинитель 18, перемещаясь, увлекает за собой запястье 19, двигатель с понижающей передачей 21 сообщают первому элементу 20 вращение вокруг оси 22, вращение вокруг оси 25 обеспечивается двигателем с понижающей передачей 28, одной своей стороной рычаги 24 прикреплены с возможностью вращения вокруг оси 25, а другой своей стороной рычаги прикреплены ко второму элементу 23, благодаря этому запястье 12 перемещается параллельно оси 22. Двигатель с понижающей передачей 29 приводит фланец 26 во вращение вокруг оси 27, перпендикулярной оси 25. Движение по заданной траектории между прессами 2 и 3 передаётся заготовке 31 через державку 30, соединённую с фланцем 26. є 88W2 ЧО «* 27488 со \ 27488 7 СО й V » -•я Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м Ужгород, вул Гагаріна, 101 (03122)3-72-89 (03122)2-57-03 Є
ДивитисяДодаткова інформація
Назва патенту англійськоюIndustrial robot
Автори англійськоюMaletti Enrico
Назва патенту російськоюПромышленный робот
Автори російськоюМалетти Энрико
МПК / Мітки
МПК: B21D 43/04, B25J 9/10
Мітки: робот, промисловий
Код посилання
<a href="https://ua.patents.su/9-27488-promislovijj-robot.html" target="_blank" rel="follow" title="База патентів України">Промисловий робот</a>
Промисловий робот
Номер патенту: 24123
Опубліковано: 31.08.1998
Автор: Баньковський Петро Андрійович
МПК: B25J 1/00
Мітки: робот, промисловий
Формула / Реферат:
Промышленный робот, содержащий руку, состоящую из платформ треугольной формы, каждая из которых связана с соседней платформой посредством трех приводов линейного перемещения, шарнирно установленных на этих платформах, а также расположенный на крайней платформе руки схват, в корпусе которого установлен привод перемещения его губок, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения рабочей зоны,...
Промисловий спосіб одержання ацеталей фенілгліоксалю для поліефірних композицій
Номер патенту: 20099
Опубліковано: 25.12.1997
Автори: Захарко Богдан Володимирович, Дуда Ярослав Володимирович
МПК: C07C 47/00, C07C 49/213
Мітки: поліефірних, спосіб, ацеталей, промисловий, одержання, фенілгліоксалю, композицій
Формула / Реферат:
Промисловий спосіб одержання ацеталей фенілгліоксалю для поліефірних композицій, що включає окислення ацетофенону до фенілгліоксалю і взаємодію його з надлишком аліфатичного спирту, який відрізняється тим, що як окислювач використовують алкілнітрит при 15-70°С, а на стадії ацеталізації як каталізатори використовують безводні сульфати перехідних металів при температурі 10-40°С.
Лічильник з довільним коефіцієнтом лічби
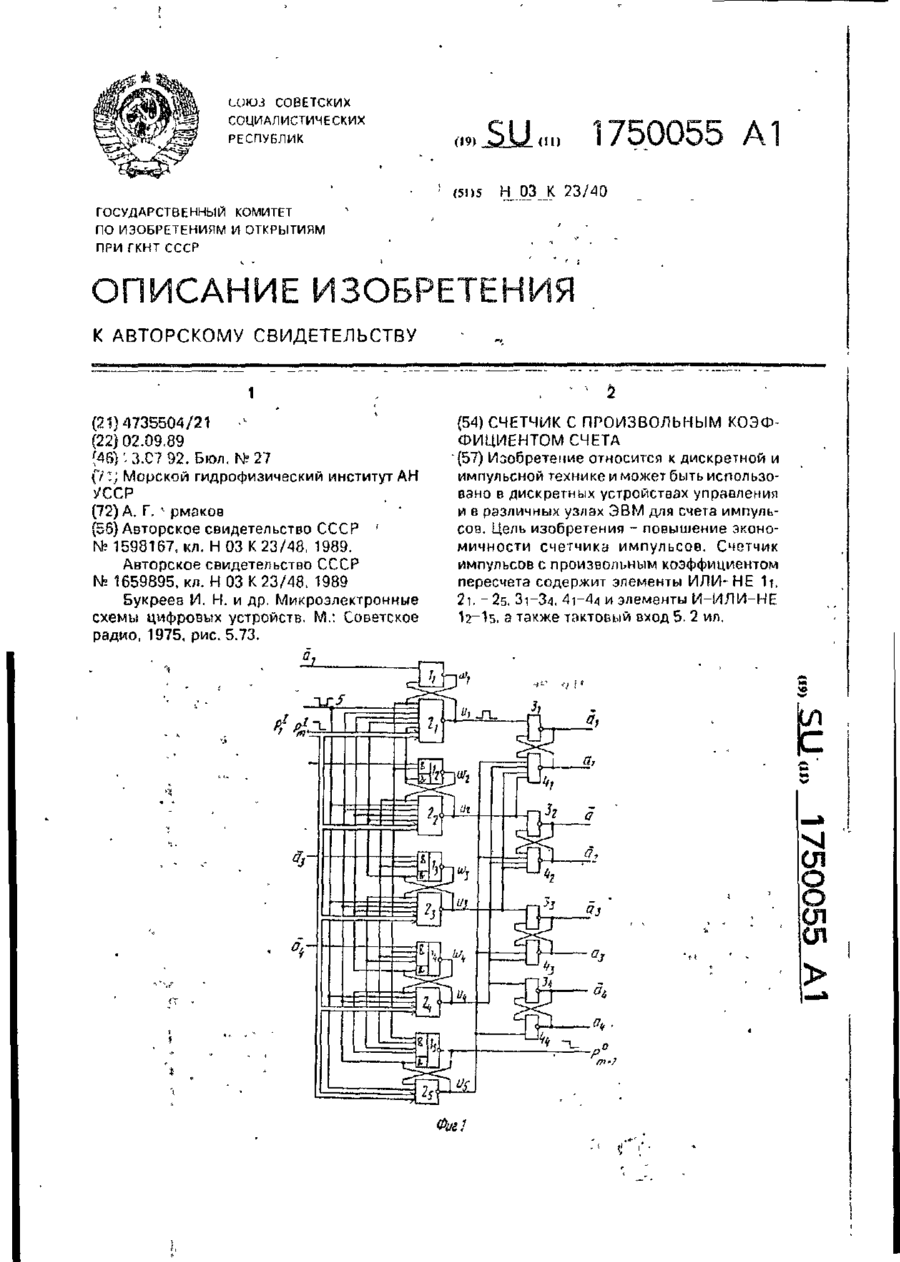
Номер патенту: 16829
Опубліковано: 29.08.1997
Автор: Єрмаков Олександр Григорович
МПК: H03K 23/00
Мітки: коефіцієнтом, лічби, лічильник, довільним
Формула / Реферат:
Счетчик с произвольным коэффициентом счета K=dn+1 dn... d1 = 1 +dn+1 dη...d1(2n-1< k £2n), содержащий n элементов И-ИЛИ-НЕ, причем выход j-го (j = ) элемента И-ИЛИ-НЕ соединен с (j+1)-M входом первой группы И р-го (р = ) элемента И-ИЛИ-НЕ, отличающийся тем, что, с целью повышения...
Пристрій для навивки боковин і протектора покришок вузькою стрічкою
Номер патенту: 5612
Опубліковано: 28.12.1994
Автори: Мальцев Віктор Михайлович, Скорняков Едуард Сергійович, Рябозад Петро Петрович
МПК: B29D 30/52
Мітки: боковин, пристрій, вузькою, протектора, навивки, стрічкою, покришок
Формула / Реферат:
(57) 1. Устройство для навивки боковин и протектора покрышек узкой лентой, содержащее приводной барабан для установки каркаса покрышки, установленные на раме головку для наложения ленточки и ее прикатки, корпус которой смонтирован на каретке с приводом для ее возвратно-поступательного перемещения относительно приводного барабана вдоль направляющих, и привод для вращения головки, отличающееся тем, что головка для наложения ленточки и ее...
З’ємна ізолююча вишка контактної мережі
Номер патенту: 14755
Опубліковано: 18.02.1997
Автор: Чеботарьов Григорій Аврамович
МПК: B60M 1/00
Мітки: мережі, вишка, контактної, з'ємна, ізолююча
Формула / Реферат:
Съемная изолирующая вышка контактной сети, содержащая основание с четырьмя колесами, закрепленными на полуосях с возможностью вращения вокруг них, захваты за рельс в виде Г-образных рычагов с роликами на концах, изолирующий пояс со стойками и рабочей площадкой в верхней части, отличающаяся тем, что упомянутые захваты в виде Г-образных рычагов с роликами на концах закреплены одним концом с помощью винтового зажима к торцам полуосей колес...
Попередній патент: Добувна машина безперервної дії
Наступний патент: Фармакологічний засіб у вигляді мікрокапсул та спосіб його одержання
Випадковий патент: Пристрій для неруйнівного контролю трубних колін