Структурно надлишковий датчик аеродинамічного кута
Номер патенту: 76020
Опубліковано: 25.12.2012
Автори: Гордін Олександр Григорович, Губа Євген Анатолійович

Формула / Реферат
1. Структурно надлишковий датчик аеродинамічного кута, що містить корпус, флюгер, вісь флюгера, демпфер, противагу та механічний підвіс, чутливим елементом якого є потенціометр, який відрізняється тим, що підвіс виконаний у вигляді восьми струнних пружних розтяжок, а також до його складу введені вісім постійних магнітів, два жорстких стержні, два центральних вузли закріплення, вісім нерухомих вузлів закріплення, чотири рухомих вузли закріплення, систему обробки інформації, причому кожна струнна пружна розтяжка закріплена одним своїм кінцем на нерухомому вузлі закріплення, другим - на рухомому вузлі закріплення, кожен з яких через жорсткий стержень зв'язаний з віссю підвісу флюгера, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, нерухомі вузли закріплення струнних пружних розтяжок з'єднані з корпусом.
2. Структурно надлишковий датчик аеродинамічного кута за п. 1, який відрізняється тим, що система обробки інформації включає вісім ідентичних каналів, кожний з яких складається з автогенератора, блока узгодження, пристрою керування перетворювачем, перетворювача кількості імпульсів в код, генератора заповнювальних імпульсів та вихідного буферного регістра, причому вихід генератора з'єднаний з входом блока узгодження, послідовно зв'язаного з пристроєм керування, один вихід якого підключений до першого входу перетворювача кількості імпульсів в код, а другий вихід - до першого керуючого входу вихідного буферного регістра, з інформаційним входом якого з'єднаний вихід перетворювача кількості імпульсів в код, а другий керуючий вхід вихідного буферного регістра з'єднаний з вихідним портом обчислювального пристрою, причому другий вхід перетворювача кількості імпульсів в код зв'язаний з виходом генератора заповнювальних імпульсів, а вихід вихідного буферного регістра з'єднаний з відповідним портом обчислювального пристрою.
Текст
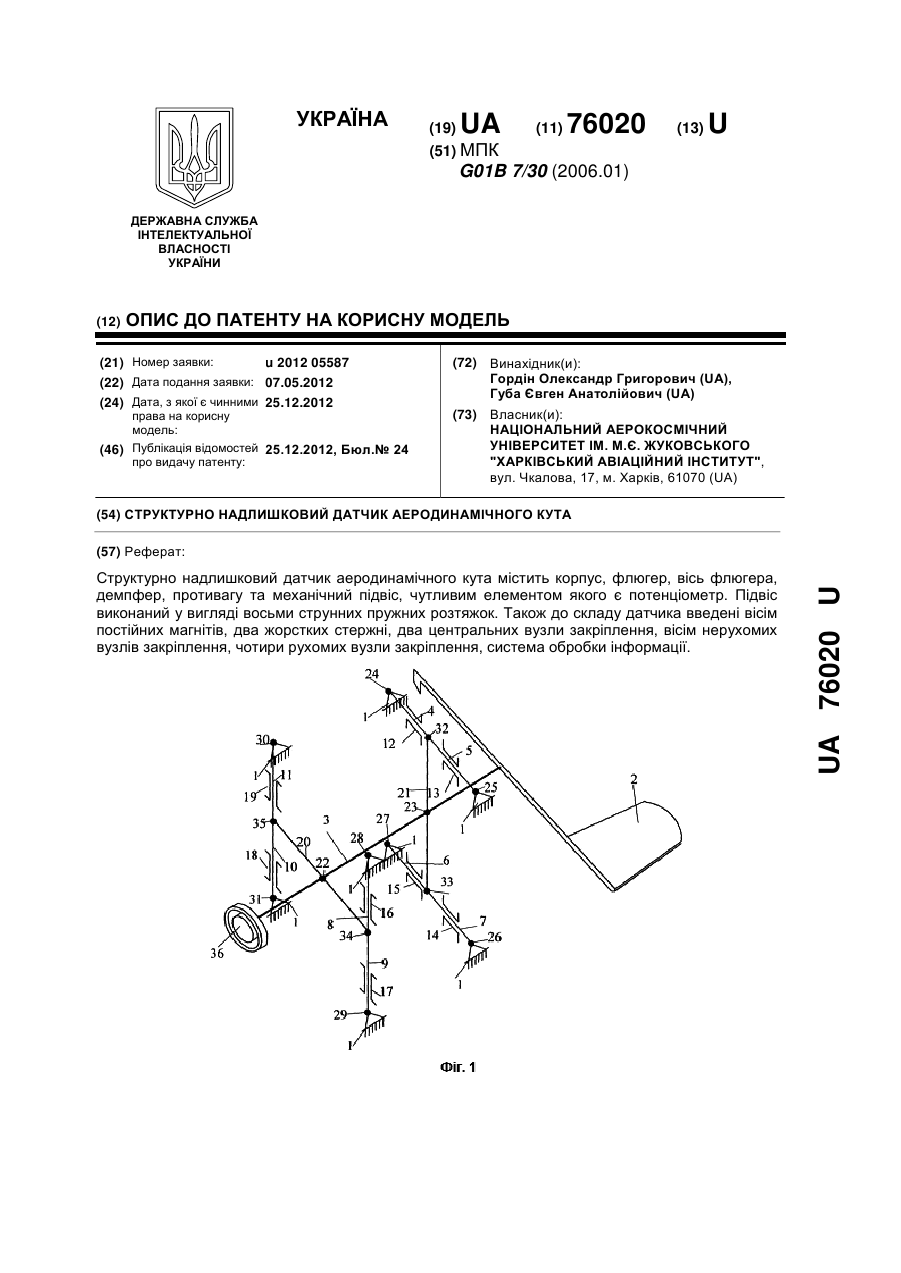
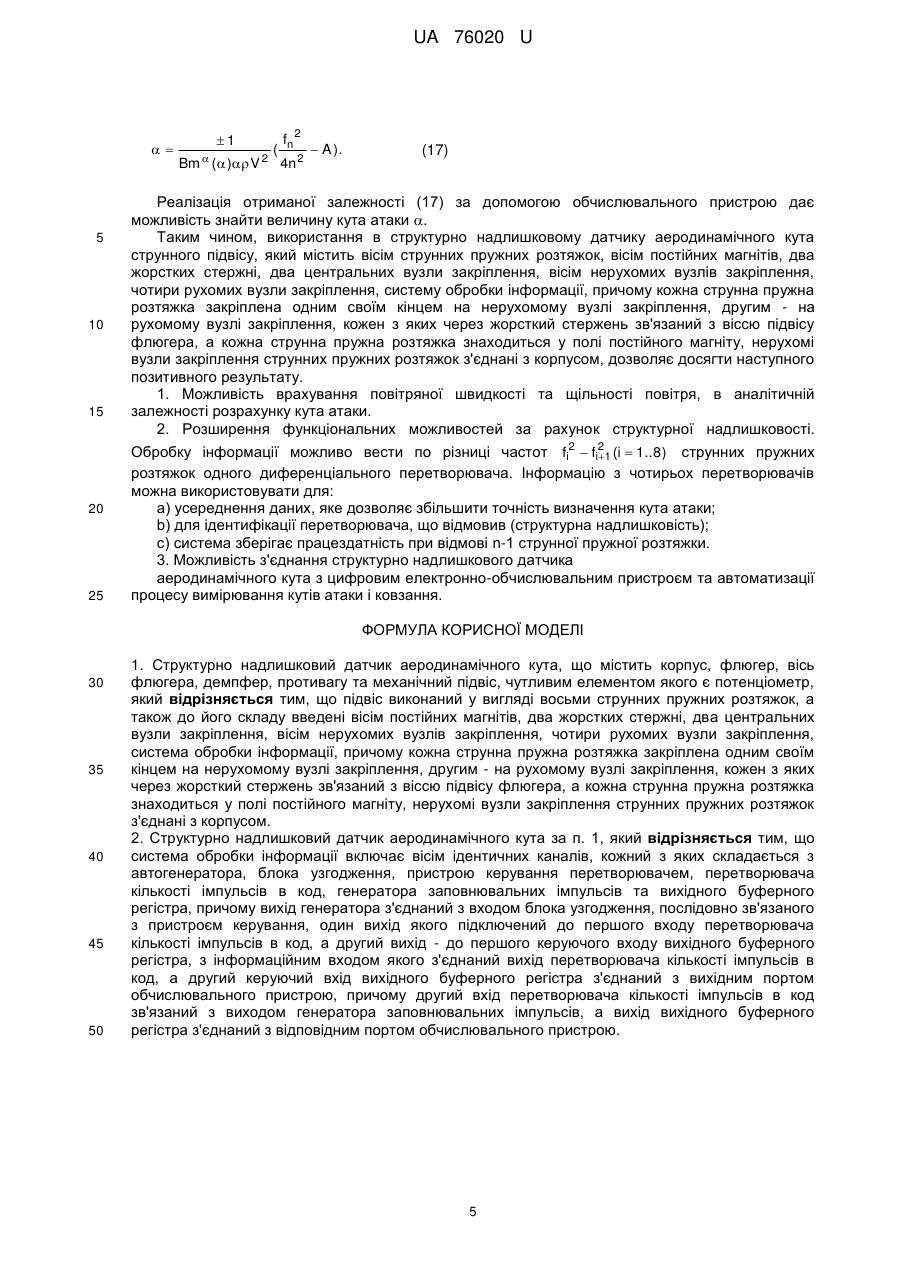
Реферат: UA 76020 U UA 76020 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки і може бути використана в аерометричних системах та системах повітряних сигналів, для отримання інформації про аеродинамічні кути атаки і ковзання. Відомий датчик аеродинамічних кутів пневматичний [Авиационные приборы и системы: Учебное пособие/Г.И. Клюев, Н.Н. Макаров, В.М. Солдаткин; под ред. В.А. Мишина. Ульяновск: УлГТУ, 2000.-343 с; Браславский, Д. А. Приборы и датчики летательных аппаратов: ученик для вузов /Д. А. Браславский. - М.: Машиностроение, 1970.-251 с; Боднер, В. А. Авиационные приборы / В. А. Боднер, Г. О. Фридлендер, Н. И. Чистяков. - М.: Оборонгиз, 1960.345 с], який має корпус, крильчатку, чутливий елемент циліндричний, циліндричну ємність, дві перегородки, валик з крильчатками. До недоліків такого пристрою належать: низька точність на невеликих швидкостях польоту літального апарата за рахунок тертя в опорах датчика, забруднення, в процесі експлуатації пневматичних трактів, в зв'язку з чим знижується надійність приладу. Відомий також датчик аеродинамічних кутів суміщений з приймачем повітряного тиску [Авиационные приборы и системы: Учебное пособие/Г.И. Клюев, Н.Н. Макаров, В.М. Солдаткин; под ред. В.А. Мишина. - Ульяновск: УлГТУ, 2000.-343 с; Браславский, Д. А. Приборы и датчики летательных аппаратов: ученик для вузов /Д. А. Браславский. - М.: Машиностроение, 1970.-251 с; Боднер, В. А. Авиационные приборы / В. А. Боднер, Г. О. Фридлендер, Н. И. Чистяков. - М.: Оборонгиз, 1960.-345 с], який складається з корпуса, флюгера, приймача повітряного тиску, вузла передачі тисків з магнітнорідинним ущільненням, що має вал, корпус, постійний магніт, полюсний наконечник, феромагнітну рідину, штуцер, підшипник. До недоліків такого пристрою належать: мала чутливість зонда, жорсткі конструктивні параметри вузла магніторідинного ущільнення, для надійної роботи при мінусових температурах вузол магніторідинного ущільнення потрібно обігрівати, що призводить до додаткових ресурсозатрат, зниження надійності, за рахунок особливостей вузла передачі тисків з магніторідинним ущільненням, зниження робочого діапазону температур. Як прототип вибраний датчик аеродинамічних кутів флюгерний з механічним підвісом ДАУ85 [Авиационные приборы и системы: Учебное пособие/Г.И. Клюев, Н.Н. Макаров, В.М. Солдаткин; под ред. В.А. Мишина. -Ульяновск: УлГТУ, 2000.-343 с; Браславский, Д. А. Приборы и датчики летательных аппаратов: ученик для вузов /Д. А. Браславский. - М.: Машиностроение, 1970.-251 с; Боднер, В. А. Авиационные приборы / В. А. Боднер, Г. О. Фридлендер, Н. И. Чистяков. - М.: Оборонгиз, 1960.-345 с]. До складу датчика входить корпус, флюгер, вісь флюгера, демпфер, противага та механічний підвіс, чутливим елементом якого є потенціометр. До недоліків такого пристрою належать: інструментальні похибки за рахунок сухого тертя в потенціометрі датчика та безпосередньо в опорі, неврахування величин повітряної швидкості та щільності повітря, похибки при значних кутах атаки за рахунок протидіючого елемента, чутливим елементом є потенціометри, які обумовлюють аналоговий вихід сигналу. Задача корисної моделі - підвищення точності виміру кутів атаки та ковзання, урахування величин повітряної швидкості та щільності повітря, можливість вести обробку інформації по квадрату різниці частот сусідніх струнних пружних розтяжок одного диференційного перетворювача, забезпечення працездатності при відмові сімох струнних пружних розтяжок, а також можливість з'єднання структурно надлишкового датчика аеродинамічного кута безпосередньо з цифровим обчислювальним пристроєм. Поставлена задача вирішується тим, що в датчик аеродинамічного кута, який містить корпус, флюгер, вісь флюгера, демпфер, противагу та механічний підвіс, чутливим елементом якого є потенціометр, згідно з корисною моделлю, введений підвіс, виконаний у вигляді восьми струнних пружних розтяжок, а також до його складу введені вісім постійних магнітів, два жорстких стержні, два центральних вузли закріплення, вісім нерухомих вузлів закріплення, чотири рухомих вузли закріплення, систему обробки інформації, причому кожна струнна пружна розтяжка закріплена одним своїм кінцем на нерухомому вузлі закріплення, другим - на рухомому вузлі закріплення, кожен з яких через жорсткий стержень зв'язаний з віссю підвісу флюгера, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, нерухомі вузли закріплення струнних пружних розтяжок з'єднані з корпусом. Задача, яка поставлена, досягається також тим, що система обробки інформації включає вісім ідентичних каналів, кожний з яких складається з автогенератора, блока узгодження, пристрою керування перетворювачем, перетворювача кількості імпульсів в код, генератора заповнювальних імпульсів та вихідного буферного регістра, причому вихід генератора з'єднаний з входом блока узгодження, послідовно зв'язаного з пристроєм керування, один вихід якого підключений до першого входу перетворювача кількості імпульсів в код, а другий вихід - до першого керуючого входу вихідного буферного регістра, з інформаційним входом якого 1 UA 76020 U 5 10 15 20 25 30 35 40 45 50 55 60 з'єднаний вихід перетворювача кількості імпульсів в код, а другий керуючий вхід вихідного буферного регістра з'єднаний з вихідним портом обчислювального пристрою, причому другий вхід перетворювача кількості імпульсів в код зв'язаний з виходом генератора заповнювальних імпульсів, а вихід вихідного буферного регістра з'єднаний з відповідним портом обчислювального пристрою. На фіг. 1 наведено спрощену конструктивно-компоновочну схему структурно надлишкового датчика аеродинамічного кута, на фіг. 2 - схему системи обробки інформації, на фіг. 3 - закони змінювання сигналу в схемі обробки інформації. Структурно надлишковий датчик аеродинамічного кута складається з корпусу 1, флюгера з противагою 2, осі обертання флюгера 3, струнних пружних розтяжок 4, 5, 6, 7, 8, 9, 10, 11, постійних магнітів 12, 13, 14, 15, 16, 17, 18, 19, жорстких стержнів 20, 21, центральних вузлів закріплення 22, 23, нерухомих вузлів закріплення 24, 25, 26, 27, 28, 29, 30, 31, рухомих вузлів закріплення 32, 33, 34, 35, демпфера 36, причому кожна струнна пружна розтяжка 4, 5, 6, 7, 8, 9,10,11 закріплена одним своїм кінцем на нерухомому вузлі закріплення 24, 25, 27, 26, 28, 29, 31, 30 відповідно, другим - на рухомому вузлі закріплення 4,5-32, 6,7-33, 8,9-34,10,11-35, причому кожний рухомий вузол через жорсткий стержень 20, 21 нерухомо зв'язаний з віссю підвісу флюгера 3, а кожна струнна пружна розтяжка 4, 5, 6, 7, 8, 9, 10, 11 знаходиться у полі постійного магніту 12, 13, 15, 14, 16, 17, 18, 19 відповідно. Нерухомі вузли закріплення 24, 25, 26, 27, 28, 29, 30, 31 струнних пружинних розтяжок жорстко з'єднані з корпусом 1. Струнні розтяжки 4, 5, 6, 7, 8, 9, 10, 11 у початковому стані (у статичному режимі) мають попереднє (початкове) натягнення, при цьому власні частоти поперечних коливань всіх розтяжок у полі магнітів 12, 13, 14, 15, 16, 17, 18, 19 співпадають. Система обробки інформації включає вісім ідентичних каналів, кожний з яких складається з автогенератора 37, блока узгодження 38, пристрою керування перетворювача кількості імпульсів в код 40, генератора заповнюючих імпульсів 41 та вихідного буферного регістра 42, причому вихід автогенератора 37 з'єднаний з входом блока узгодження 38, послідовно зв'язаного з пристроєм керування перетворювачем 39, один вихід якого підключений до першого входу перетворювача кількості імпульсів в код 40, а другий вихід - до першого керуючого входу вихідного буферного регістра 42, з інформаційним входом якого з'єднаний вихід перетворювача кількості імпульсів в код 40, а другий керуючий вхід вихідного буферного регістра 42 з'єднаний з вихідним портом 44 обчислювального пристрою 45. Другий вхід перетворювача кількості імпульсів в код 40 зв'язаний з виходом генератора заповнюючих імпульсів 41. Вихід 43 вихідного буферного регістра 42 з'єднаний з відповідним портом обчислювального пристрою 45. Обробка інформації здійснюється шляхом підрахунку кількості імпульсів генератора, які заповнюють половину періоду коливань сигналу автогенератора 37. Гармонічно змінний сигнал з виходу автогенератора 37 надходить на вхід блока узгодження 38, який служить для формування сигналу S з необхідними параметрами (амплітуда, форма, потужність і т.і.) і узгодження виходу автогенератора 37 із входом пристрою 39 керування перетворювачем. Пристрій 39 керування перетворювачем формує сигнал, що є послідовністю імпульсів, період яких кратний періоду вихідного гармонічного сигналу автогенератора 37. Сигнал на виході генератора заповнювальних імпульсів 41 являє собою послідовність імпульсів з більш високою частотою проходження, ніж частота гармонічного сигналу автогенератора 37. Частота генератора заповнювальних імпульсів 41 вибирається такою, щоб період вихідного сигналу автогенератора 37 включав таку кількість імпульсів генератора заповнювальних імпульсів 41, яка забезпечувала б необхідну точність і чутливість схеми попередньої обробки інформації. Далі сигнал генератора заповнюючих імпульсів 41 та сигнал пристрою керування перетворювачем 39 надходять на входи перетворювача 40 кількості імпульсів в код, причому перетворювач 40 кількості імпульсів в код містить керований лічильник, який перетворює означену кількість імпульсів за вибраний проміжок часу в числовий код. Такий проміжок часу вибирається кратним періоду гармонічного сигналу автогенератора 37. Початкова корисна інформація зберігається у вихідному буферному регістрі 42 перед подальшим перетворенням за допомогою обчислювальних засобів. З вихідного регістру 42 інформація у кодовому вигляді видається за допомогою шини 43. Вхід 44 буферного регістру 42 необхідний для подачі на нього керуючого сигналу зчитування (вибірки) інформації. Структурно надлишковий датчик аеродинамічного кута працює наступним чином. Коли флюгер 2 перебуває в потоці повітря, виникає момент флюгера відносно осі 3. Враховуючи, що струнні пружні розтяжки 4, 5, 6, 7, 8, 9, 10, 11 мають попереднє натягнення, в сталому режимі маємо баланс аеродинамічного моменту флюгера і протидіючого підвісу: 2 UA 76020 U Mф М ; п Mф m ( ) 5 V 2 Sl ф , 2 (1) де Мф - аеродинамічний момент флюгера; М'п - момент протидії струнних пружних розтяжок (всіх); - кут атаки; m ( ) - коефіцієнт аеродинамічного моменту флюгера, відома функція кута атаки; 10 - щільність повітря; V - повітряна швидкість; S - площа характерної поверхні флюгера; lф - характерна довжина флюгера. Рівняння балансу моментів має вигляд: Mф 4Mп 0, 15 де Мп - момент протидії однієї пари струнних пружних розтяжок. Момент однієї пари струнних пружних розтяжок можемо представити у такому вигляді: Мп = Fh, 20 1 1 V 2 Мф m () Sl ф ; 4 4 2 Fh 35 1 V 2 m () Sl ф . 4 2 (4) (5) При зміні аеродинамічного моменту флюгера 2 змінюються натягнення струнних пружних розтяжок 4, 5, 6, 7, 8, 9, 10, 11, а також - частота їх власних коливань. Частоту власних коливань струнної пружної розтяжки однієї пари на першій гармоніці можна представити у такому вигляді: f2 30 (3) де F - сила протидії пари струнних пружних розтяжок при впливі на них; h - плече (відстань від осі струнних пружних розтяжок до осі обертання флюгера). Враховуючи Мф та (2) рівняння (3) має вигляд: Mп 25 (2) F0 1 F0 ,f , 4ml 2 ml (6) де Fo - сила, прикладена до струнної пружної розтяжки; m - маса струнної пружної розтяжки; l - довжина активної частини струнної пружної розтяжки. Вважаємо, що схема обробки інформації (фіг.2) налаштована на виділення першої гармоніки коливань струнної пружної розтяжки. В тому випадку, якщо сила натягнення струнної пружної розтяжки змінюється відносно початкового її значення Fo на величину F. Для кожної струнної пружної розтяжки співвідношення (6) частоти власних коливань струнної пружної розтяжки можливо представити так: f 1 F0 F . 2 ml (7) Приріст (зміну) сили натягнення струнної пружної розтяжки наведемо в наступному вигляді: 40 F 1 V 2 m () Sl ф . 4h 2 (8) 3 UA 76020 U Враховуючи (7) рівняння (6) можна записати так: Підставивши рівняння (8) в (9) отримаємо: f2 1 F0 F . 4 ml (9) 5 F0 f2 1 4 f2 1 4ml 1 V 2 m ( ) Sl ф 4h 2 ; ml 1 V 2 m ( ) Sl ф . F0 4h 2 (10) Провівши елементарні перетворення співвідношення (10) запишемо в такому вигляді: f2 F0 1 V 2 m ( ) Sl ф ; 4ml 16mlh 2 F0 1 V 2 m ( ) Sl ф ; 4ml 16mlh 2 Sl ф F f2 0 m ( ) V 2 . 4ml 32mlh f2 10 (11) Враховуючи, що F0 ,m,l, S,lф ,h const , і прийнявши Sl ф F0 A, B залежність (11) 4ml 32mlh представимо в такому вигляді: f 2 A Bm ( ) V 2 . (12) Отримаємо залежність для визначення кута атаки : 15 1 Bm () V 2 ( f 2 A ). (13) Виділення інформації про кут можливо за допомогою будь-якої струнної пружної розтяжки, наприклад струнної пружної розтяжки 5: T5 1 1 , f5 ., f5 T5 (14) 20 25 де Т5 - період власних коливань струнної пружної розтяжки 5. При використанні принципу заповнювання напівперіоду (фіг. 3) коливань струни 5 імпульсами високої частоти: 1 n T5 nTn , (15) 2 fn де n - кількість заповнюючих імпульсів за півперіод коливань струнної пружної розтяжки 5; Тn - період власних коливань заповнюючих імпульсів; fn - частота заповнюючих імпульсів. Тобто: T5 30 2n . fn (16) У відповідності до залежності (13): 4 UA 76020 U 5 10 15 20 25 1 ( fn 2 Bm ( ) V 2 4n 2 A ). (17) Реалізація отриманої залежності (17) за допомогою обчислювального пристрою дає можливість знайти величину кута атаки . Таким чином, використання в структурно надлишковому датчику аеродинамічного кута струнного підвісу, який містить вісім струнних пружних розтяжок, вісім постійних магнітів, два жорстких стержні, два центральних вузли закріплення, вісім нерухомих вузлів закріплення, чотири рухомих вузли закріплення, систему обробки інформації, причому кожна струнна пружна розтяжка закріплена одним своїм кінцем на нерухомому вузлі закріплення, другим - на рухомому вузлі закріплення, кожен з яких через жорсткий стержень зв'язаний з віссю підвісу флюгера, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, нерухомі вузли закріплення струнних пружних розтяжок з'єднані з корпусом, дозволяє досягти наступного позитивного результату. 1. Можливість врахування повітряної швидкості та щільності повітря, в аналітичній залежності розрахунку кута атаки. 2. Розширення функціональних можливостей за рахунок структурної надлишковості. Обробку інформації можливо вести по різниці частот fi2 fi21 (i 1..8) струнних пружних розтяжок одного диференціального перетворювача. Інформацію з чотирьох перетворювачів можна використовувати для: a) усереднення даних, яке дозволяє збільшити точність визначення кута атаки; b) для ідентифікації перетворювача, що відмовив (структурна надлишковість); c) система зберігає працездатність при відмові n-1 струнної пружної розтяжки. 3. Можливість з'єднання структурно надлишкового датчика аеродинамічного кута з цифровим електронно-обчислювальним пристроєм та автоматизації процесу вимірювання кутів атаки і ковзання. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 45 50 1. Структурно надлишковий датчик аеродинамічного кута, що містить корпус, флюгер, вісь флюгера, демпфер, противагу та механічний підвіс, чутливим елементом якого є потенціометр, який відрізняється тим, що підвіс виконаний у вигляді восьми струнних пружних розтяжок, а також до його складу введені вісім постійних магнітів, два жорстких стержні, два центральних вузли закріплення, вісім нерухомих вузлів закріплення, чотири рухомих вузли закріплення, система обробки інформації, причому кожна струнна пружна розтяжка закріплена одним своїм кінцем на нерухомому вузлі закріплення, другим - на рухомому вузлі закріплення, кожен з яких через жорсткий стержень зв'язаний з віссю підвісу флюгера, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, нерухомі вузли закріплення струнних пружних розтяжок з'єднані з корпусом. 2. Структурно надлишковий датчик аеродинамічного кута за п. 1, який відрізняється тим, що система обробки інформації включає вісім ідентичних каналів, кожний з яких складається з автогенератора, блока узгодження, пристрою керування перетворювачем, перетворювача кількості імпульсів в код, генератора заповнювальних імпульсів та вихідного буферного регістра, причому вихід генератора з'єднаний з входом блока узгодження, послідовно зв'язаного з пристроєм керування, один вихід якого підключений до першого входу перетворювача кількості імпульсів в код, а другий вихід - до першого керуючого входу вихідного буферного регістра, з інформаційним входом якого з'єднаний вихід перетворювача кількості імпульсів в код, а другий керуючий вхід вихідного буферного регістра з'єднаний з вихідним портом обчислювального пристрою, причому другий вхід перетворювача кількості імпульсів в код зв'язаний з виходом генератора заповнювальних імпульсів, а вихід вихідного буферного регістра з'єднаний з відповідним портом обчислювального пристрою. 5 UA 76020 U 6 UA 76020 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюStructurally redundant aerodynamic angle sensor
Автори англійськоюHordin Oleksandr Hryhorovych, Huba Yevhen Anatoliiovych
Назва патенту російськоюСтруктурно избыточный датчик аэродинамического угла
Автори російськоюГордин Александр Григорьевич, Губа Евгений Анатолиевич
МПК / Мітки
МПК: G01B 7/30
Мітки: кута, структурної, надлишковий, аеродинамічного, датчик
Код посилання
<a href="https://ua.patents.su/9-76020-strukturno-nadlishkovijj-datchik-aerodinamichnogo-kuta.html" target="_blank" rel="follow" title="База патентів України">Структурно надлишковий датчик аеродинамічного кута</a>
Датчик лінійних переміщень
Номер патенту: 37760
Опубліковано: 10.12.2008
Автори: Рева Вікторія Валеріївна, Гордін Олександр Григорович
МПК: G01B 21/00
Мітки: лінійних, датчик, переміщень
Формула / Реферат:
Датчик лінійних переміщень, що містить корпус, напрямну призму, ролик і систему обробки інформації, яка включає дві струнні пружні розтяжки, закріплені одними своїми кінцями на центральному вузлі закріплення, другими - на бокових вузлах закріплення, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, а центральний вузол закріплення з'єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно...
Датчик кутових переміщень
Номер патенту: 28737
Опубліковано: 25.12.2007
Автори: Гордін Олександр Григорович, Тимченко Марина Юріївна
МПК: G01B 7/30
Мітки: датчик, кутових, переміщень
Формула / Реферат:
1 Датчик кутових переміщень, що містить корпус та рухомий елемент, який відрізняється тим, що в його склад введено кругову призму, зв'язану з рухомим елементом, ходовий ролик, вісь якого за допомогою штока зв'язана з першим пружним елементом і який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою другого пружного елемента, розміщений у рухомій рамі струнний перетворювач інформації, який містить дві струнні пружні розтяжки,...
Датчик лінійних прискорень
Номер патенту: 45150
Опубліковано: 26.10.2009
Автори: Клецько Вероніка Сергіївна, Гордін Олександр Григорович
МПК: G01P 15/00
Мітки: лінійних, датчик, прискорень
Формула / Реферат:
Датчик лінійних прискорень, що містить камеру, повністю заповнену рідиною, з'єднану з корпусом, в якій нерухомо закріплена жорстка пластина із центральним і периферійними отворами, дві пружні розтяжки і збудник коливань струнного частотного перетворювача, який відрізняється тим, що в камері додатково розміщено ще одну пластину, ідентичну першій, введені дві гідравлічні магістралі, що з'єднують камеру з першим і другим гідроциліндрами із...
Датчик кутових переміщень
Номер патенту: 37455
Опубліковано: 25.11.2008
Автори: Савостьянова Анна Олегівна, Гордін Олександр Григорович
МПК: G01B 7/30
Мітки: датчик, переміщень, кутових
Формула / Реферат:
Датчик кутових переміщень, що містить корпус, кругову напрямну призму, рухому каретку, рухому раму, струнний перетворювач інформації та систему обробки інформації, який відрізняється тим, що кругова напрямна призма є нерухомою, виконана ще одна рухома каретка, розташована під кутом 90 ° відносно першої, кожна з рухомих кареток складається з першого гідроциліндра, всередині якого знаходиться поршень, з'єднаний за допомогою пружини з ходовим...
Датчик лінійних переміщень
Номер патенту: 26943
Опубліковано: 10.10.2007
Автори: Гордін Олександр Григорович, Скічко Юлія Іванівна
МПК: G01B 21/00
Мітки: лінійних, датчик, переміщень
Формула / Реферат:
1. Датчик лінійних переміщень, що містить корпус та шток, який відрізняється тим, що до його складу введено об'ємну призму, ходовий ролик, вісь якого зв'язана з пружним елементом, який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою пружного елементу, у рухомій рамі розташований струнний перетворювач інформації, який містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на рухомому вузлі закріплення, другими -...
Попередній патент: Формувач пачки імпульсів типу меандр перенастроюваної тривалості і фіксованої кількості, яка дорівнює шістнадцяти
Наступний патент: Ріжучий апарат збиральної машини
Випадковий патент: Пристрій для подрібнення матеріалу