Захоплювач
Формула / Реферат
1. Захоплювач, що має основну частину (10, 34), щонайменше дві кігтьові секції (12), шарнірно з'єднані з основною частиною, які мають перший кінець та другий кінець, та привідні механізми (50) для зміни положення кігтьових секцій, причому кігтьові секції шарнірно з'єднані другим кінцем з привідним механізмом та з основною частиною (10) на ділянці між першим та другим кінцями за допомогою клепаного з'єднання (14), який відрізняється тим, що зазначені клепані з'єднання мають дві паралельні підвісні пластини, першу підвісну пластину (22а) та другу підвісну пластину (22b), які з'єднані одна з одною трубчастою з'єднувальною тягою, зазначені підвісні пластини мають перший кінець та другий кінець, і кігтьові секції (12) мають перші вушка (26), з якими шарнірно з'єднані перші кінці підвісних пластин, а на першій поверхні корпусної пластини (10) розташовані другі вушка (30), з якими шарнірно з'єднані другі кінці підвісних пластин, і відстань між підвісними пластинами становить від 0,5 до 2,0 довжин підвісної пластини.
2. Захоплювач за п. 1, який відрізняється тим, що відстань між підвісними пластинами (22а, 22b) по суті дорівнює довжині підвісних пластин.
3. Захоплювач за п. 1 або 2, який відрізняється тим, що зазначений привідний механізм (50) для зміни положення кігтьової секції (12) є привідним механізмом, що має регульовану довжину (50), з першим кінцем (51а) та другим кінцем (51b), приєднаним своїм першим кінцем безпосередньо або через з'єднувальну деталь до другого кінця кігтьової секції (12), а своїм другим кінцем - до основної частини (10).
4. Захоплювач за п. 3, який відрізняється тим, що зазначений привідний механізм, який має регульовану довжину (50), є привідним механізмом типу поршень-циліндр, краще, гідравлічним циліндром.
5. Захоплювач за п. 3 або 4, який відрізняється тим, що має хрестоподібне з'єднання (56), другі кінці кігтьових секцій (12) шарнірно з'єднані із хрестоподібним з'єднанням, і хрестоподібне з'єднання приєднане до першого кінця (51а) привідного механізму, який має регульовану довжину (50).
6. Захоплювач за п. 5, який відрізняється тим, що має лише один привідний механізм (50) для зміни положення кігтьових секцій (12).
7. Захоплювач за будь-яким з пп. 1-6, який відрізняється тим, що основна частина включає корпусну пластину (10), яка має першу поверхню і другу поверхню та наскрізний отвір (54) посередині для привідного механізму (50), і опорні пластини (34), приєднані до другої поверхні корпусної пластини.
8. Захоплювач за п. 7, який відрізняється тим, що опорні пластини (34) утворюють закриту опорну конструкцію для захисту привідного механізму, причому опорна конструкція має підвісний отвір (44) для приєднання захоплювача до підйомного апарата.
9. Захоплювач за будь-яким з пп. 1-8, який відрізняється тим, що зазначені другі вушка (30) розташовані на зовнішньому периметрі корпусної пластини (10) або поблизу від нього.
10. Захоплювач за будь-яким з пп. 1-9, який відрізняється тим, що кігтьові секції (12) мають пластинчасту стінку (16) та ребро жорсткості (18), приєднане до її зовнішньої поверхні.
11. Захоплювач за будь-яким з пп. 1-10, який відрізняється тим, що має шість кігтьових секцій (12), розташованих симетрично навколо уявної центральної осі захоплювача.
Текст
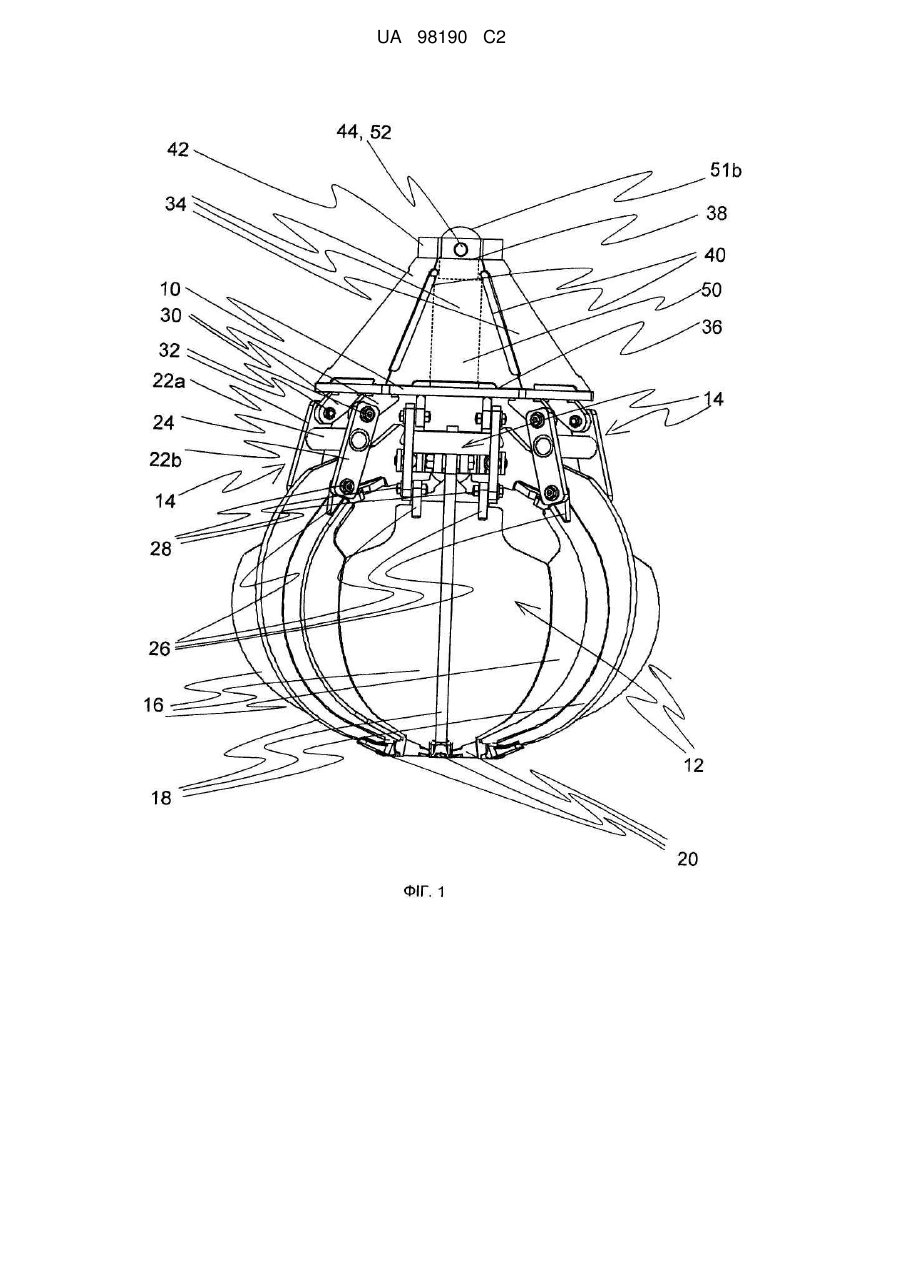
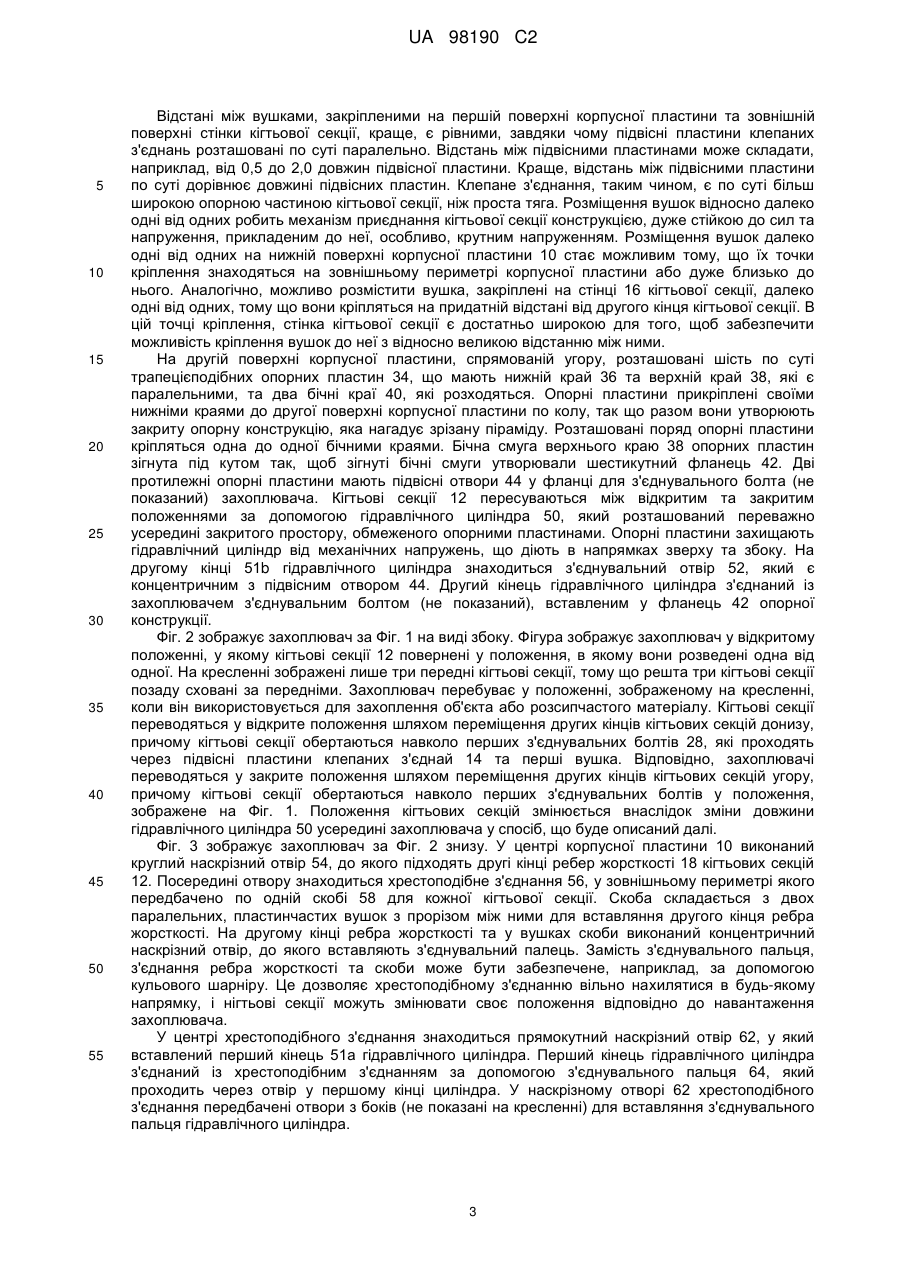
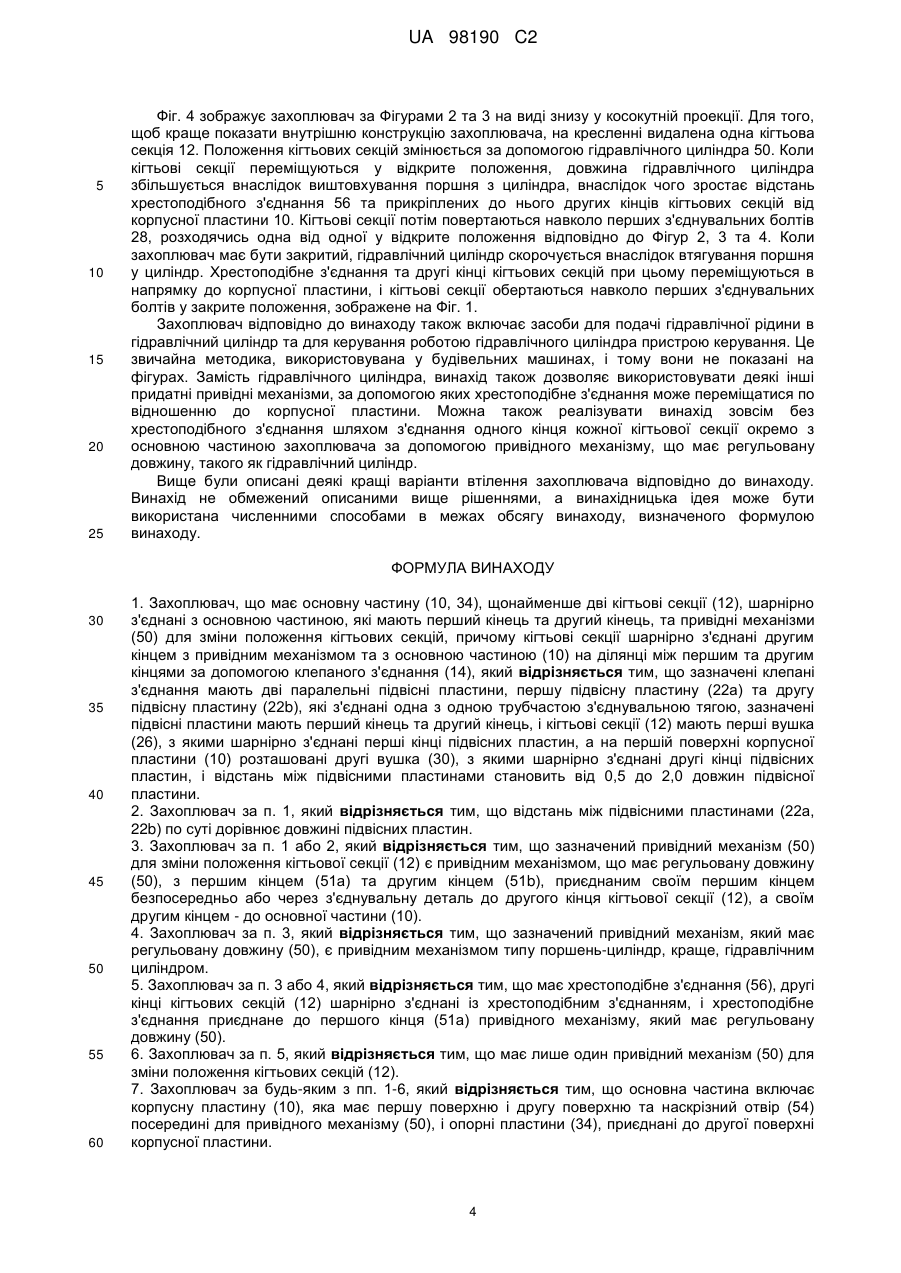
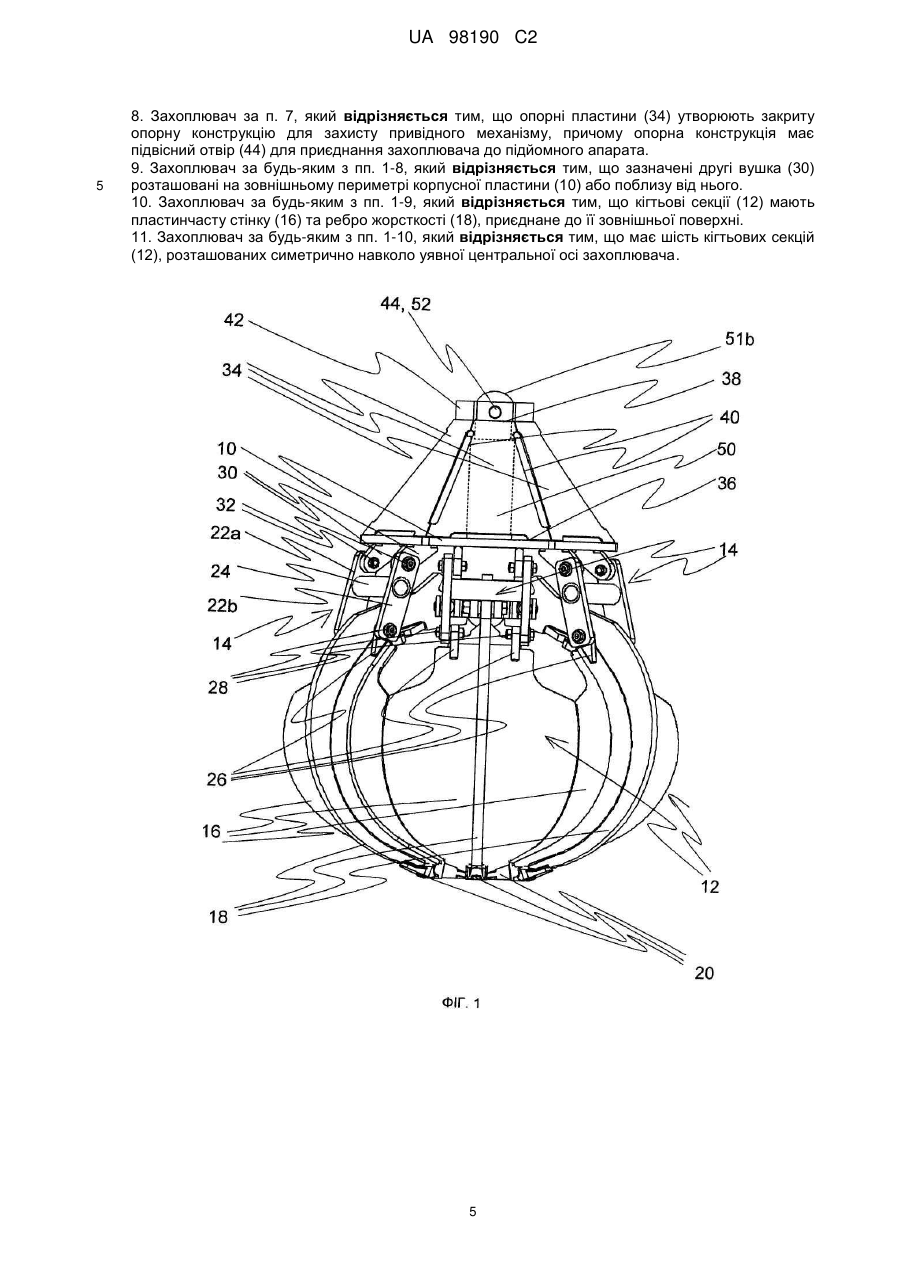
Реферат: Захоплювач відповідно до винаходу має основну частину (10, 34), щонайменше дві кігтьові секції (12), шарнірно приєднані до основної частини, та привідні механізми (50) для зміни положення кігтьових секцій. Захоплювач, краще, має шість кігтьових секцій, які розташовані симетрично навколо уявної центральної осі захоплювача. За допомогою привідних механізмів, кігтьові секції можна повертати навколо їх шарнірних точок з'єднання між відкритим та закритим положеннями. Кігтьові секції приєднані до основної частини захоплювача за допомогою клепаних з'єднань (14). Привідний механізм для зміни положення кігтьової секції, який має регульовану довжину, є привідним механізмом, приєднаним першим кінцем безпосередньо або через з'єднувальну деталь до другого кінця кігтьової секції, а своїм другим кінцем - до основної частини захоплювача. Краще, привідний механізм є привідним механізмом типу поршеньциліндр, таким як гідравлічний циліндр. В одному варіанті втілення захоплювач має лише один привідний механізм для зміни положення кігтьових секцій. Основна частина захоплювача включає корпусну пластину (10) із наскрізним отвором посередині для привідного механізму. До другої поверхні корпусної пластини прикріплені опорні пластини (34), які утворюють закриту опорну конструкцію для захисту привідного механізму. Клепані з'єднання, які утримують кігтьові секції, з'єднані з вушками (26) на зовнішньому периметрі першої поверхні корпусної пластини. UA 98190 C2 (12) UA 98190 C2 UA 98190 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід стосується захоплювача, що має основну частину, щонайменше дві кігтьові секції, шарнірно приєднані до основної частини, які мають перший кінець та другий кінець, та привідні механізми для зміни положення кігтьових секцій. Захоплювачі є вантажними пристроями, особливо, призначеними для роботи із розсипчастими матеріалами, які мають основну частину, ряд кігтьових секцій, шарнірно приєднаних до основної частини, та привідні механізми для переміщення кігтьових секцій. Основна частина має підвісний елемент, за допомогою якого захоплювач приєднується до підйомного апарата, такого як кран. Число кігтьових секцій може змінюватися в залежності від типу та моделі захоплювача. Найменше число кігтьових секцій дорівнює двом. Якщо використовується більше двох кігтьових секцій, вони звичайно розташовані симетрично навколо основної частини по колу. Захоплювач може бути приведений у відкрите положення, в якому кігтьові секції розведені убік одна від одної, та у закрите положення, в якому кігтьові секції притиснуті одна до одної та утворюють між собою порожній простір. Кігтьові секції переміщаються між відкритим та закритим положеннями за допомогою привідного механізму, який звичайно є гідравлічним циліндром або талевим механізмом. При переміщенні кігтьових секцій в різні положення, вони повертаються навколо своїх з'єднувальних муфт. Захоплювачі відомого рівня техніки мають багато недоліків. Привідні механізми, потрібні для пересування кігтьових секцій, розташовані ззовні основної частини захоплювача, і тому можуть бути пошкоджені при використанні захоплювача. Для забезпечення робочого стану привідних механізмів, вони звичайно мають бути захищені окремими захисними конструкціями, які збільшують вартість виробництва захоплювача. Кігтьові секції з'єднані з основною частиною за допомогою з'єднувальної муфти, яка розташована на одному кінці кільової секції. Під час використання, кігтьові секції зазнають високих навантажень в різних напрямках, які створюють напруження у з'єднувальній муфті. Через конструкцію захоплювача, з'єднувальні муфти часто приходиться робити маленькими, що зменшує їх міцність та знижує вантажопідйомність. Зокрема, це стосується захоплювачів, які мають множину кігтьових секцій, приєднаних симетрично навколо основної частини по колу. Захоплювач з двома кігтьовими секціями описаний у документі SU 1013392 А. Кігтьові секції приєднані до основної частини захоплювача видовженими з'єднувальними тягами. Метою винаходу є створення захоплювача з новим типом конструкції, завдяки якій можна значно зменшити недоліки та незручності, пов'язані з рішеннями відомого рівня техніки. Цілі винаходу досягаються за допомогою захоплювача, який відрізняється ознаками, викладеними у незалежних пунктах формули. Деякі кращі варіанти втілення винаходу представлені у залежних пунктах формули. Захоплювач відповідно до винаходу є вантажним пристроєм, особливо придатним для роботи з розсипчастими матеріалами, і може бути встановлений на навантажувачі або підйомному апараті, такому як кран. Захоплювач має основну частину, щонайменше дві кігтьові секції, шарнірно з'єднані з основною частиною, з першим кінцем та другим кінцем, і привідні механізми для зміни положення кігтьових секцій. За допомогою привідних механізмів, кігтьові секції можуть повертатися навколо своїх шарнірних з'єднувальних муфт між відкритим та закритим положеннями. У закритому положенні, кігтьові секції утворюють простір, по суті закритий в нижній частині для розсипчастого матеріалу, що переробляється. У відкритому стані, кігтьові секції повернуті в положення, у якому вони відведені одна від одної. У захоплювачі відповідно до винаходу, кігтьові секції шарнірно з'єднані своїми другими кінцями з привідним механізмом, що регулює положення секцій, та з основною частиною захоплювача на ділянці між першим та другим кінцями. З'єднання секцій з основною частиною здійснюється за допомогою клепаних з'єднань. Клепані з'єднання є широкими з'єднувальними елементами, які забезпечують міцне з'єднання кігтьової секції з основною частиною з високою жорсткістю при крутінні. Клепані з'єднання можуть бути використані тому, що у вибраній точці з'єднання кігтьової секції та основної частини конструкція захоплювача не обмежує розмір використовуваного з'єднувального елемента. В одному кращому варіанті втілення захоплювача відповідно до винаходу, привідний механізм для зміни положення кігтьової секції є привідним механізмом з регульованою довжиною і першим кінцем та другим кінцем. Привідний механізм з'єднаний своїм першим кінцем безпосередньо або через з'єднувальну деталь з другим кінцем кігтьової секції, а своїм другим кінцем - з основною частиною захоплювача. Краще, зазначений привідний механізм з регульованою довжиною є привідним механізмом типу поршень-циліндр, таким як гідравлічний циліндр. Інший кращий варіант втілення захоплювача відповідно до винаходу має хрестоподібне з'єднання, у якому другі кінці кігтьових секцій шарнірно з'єднані з хрестоподібним з'єднувачем, і 1 UA 98190 C2 5 10 15 20 25 30 35 40 45 50 55 хрестоподібний з'єднувач з'єднаний з першим кінцем привідного механізму з регульованою довжиною. Краще, захоплювач має лише один привідний механізм для зміни положення кігтьових секцій. В третьому кращому варіанті втілення захоплювача відповідно до винаходу, основна частина включає корпусну пластину, що має першу поверхню та другу поверхню, наскрізний отвір посередині для привідного механізму, та опорні пластини, прикріплені до другої поверхні пластини. Краще, зазначені опорні пластини утворюють закриту опорну конструкцію для захисту привідного механізму, з підвісним отвором для приєднання захоплювача до підйомного апарата. В четвертому кращому варіанті втілення захоплювача відповідно до винаходу, клепане з'єднання має дві паралельні підвісні пластини, що мають перший кінець та другий кінець. Кігтьові секції мають перші вушка, до яких шарнірно приєднані перші кінці підвісних пластин, і перша поверхня корпусної пластини має другі вушка, до яких шарнірно приєднані другі кінці підвісних пластин. Краще, зазначені другі вушка розташовані на зовнішній периферії корпусної пластини або поблизу від неї. У п'ятому кращому варіанті втілення захоплювача відповідно до винаходу передбачається шість кігтьових секцій, які розташовані симетрично навколо уявної центральної осі захоплювача. Число кігтьових секцій може також відрізнятися від шести, наприклад, дорівнювати двом, трьом, чотирьом, п'яти або восьми. Винахід має ту перевагу, що напруження, прикладене до з'єднувального механізму, є низьким, що збільшує довговічність захоплювача та подовжує його термін служби. Крім того, винахід має ту перевагу, що коли опора захоплювача розташована по суті поблизу до кінця кігтьової секції, кігтьовим секціям не треба мати високу жорсткість при крутінні, і тому кігтьові секції звичайно не повинні мати закриту будову. Це зменшує вартість виробництва захоплювача. Особливою перевагою варіанта втілення винаходу є те, що для зміни положення кігтьових секцій потрібний лише один привідний механізм. Це означає помітну економію витрат на виробництво пристрою. Особливою перевагою іншого варіанта втілення винаходу є те, що привідний механізм для зміни положення кігтьових секцій розташований усередині основної частини апарата, де він захищений від механічних навантажень. Таким чином, немає потреби забезпечувати окрему захисну конструкцію для привідного механізму. Далі винахід буде описаний більш детально. При цьому робляться посилання на супровідні креслення, на яких: Фіг. 1 зображує приклад захоплювача відповідно до винаходу на виді збоку із захоплювачем у закритому положенні, Фіг. 2 зображує захоплювач за Фіг. 1 на виді збоку із захоплювачем у відкритому положенні, Фіг. 3 зображує приклад захоплювача у відкритому положенні знизу, і Фіг. 4 зображує приклад захоплювача у відкритому положенні на косокутній проекції знизу. Фіг. 1 зображує приклад захоплювача відповідно до винаходу на виді збоку. Захоплювач має корпусну пластину 10 у формі правильного шестикутника, під якою приєднано шість кігтьових секцій 12 за допомогою клепаних з'єднань 14. Кігтьові секції мають вигнуту пластинчасту стінку 16 і ребро жорсткості приєднане ззовні до стінки. Форма стінок є такою, щоб вони мали максимальну ширину у центральной частині кігтьової секції, і ширина зменшується в напрямку до кінців кігтьової секції. Ребро жорсткості нерухомо прикріплене до зовнішньої поверхні стінки, краще, за допомогою зварювання. На першому кінці кігтьової секції знаходиться наконечник 20, знімно прикріплений до ребра жорсткості. Кігтьові секції розміщені по колу, так щоб вони були розташовані симетрично навколо уявної центральної осі захоплювача. Фігура зображує захоплювач у закритому положенні, у якому кігтьові секції притиснуті одна до одної. Таким чином, кігтьові секції утворюють порожній простір, закритий знизу для розсипчастого матеріалу, що обробляється захоплювачем. Кігтьові секції прикріплені до першої поверхні корпусної пластини 10, спрямованої донизу, за допомогою клепаних з'єднань 14. Клепані з'єднання мають дві паралельні пластинчасті підвісні пластини, першу підвісну пластину 22а та другу підвісну пластину 22b, які з'єднані одна з одною трубчастою з'єднувальною тягою 24. Перші кінці підвісних пластин приєднані до перших вушок 26 на зовнішній поверхні стінки кігтьової секції першими з'єднувальними болтами 28, і другі кінці підвісних пластин приєднані до других вушок 30 на першій поверхні корпусної пластини, поблизу до зовнішнього периметра корпусної пластини, другими з'єднувальними болтами 32. Вушка та кінці підвісних пластин мають наскрізні отвори для з'єднувальних болтів. 2 UA 98190 C2 5 10 15 20 25 30 35 40 45 50 55 Відстані між вушками, закріпленими на першій поверхні корпусної пластини та зовнішній поверхні стінки кігтьової секції, краще, є рівними, завдяки чому підвісні пластини клепаних з'єднань розташовані по суті паралельно. Відстань між підвісними пластинами може складати, наприклад, від 0,5 до 2,0 довжин підвісної пластини. Краще, відстань між підвісними пластини по суті дорівнює довжині підвісних пластин. Клепане з'єднання, таким чином, є по суті більш широкою опорною частиною кігтьової секції, ніж проста тяга. Розміщення вушок відносно далеко одні від одних робить механізм приєднання кігтьової секції конструкцією, дуже стійкою до сил та напруження, прикладеним до неї, особливо, крутним напруженням. Розміщення вушок далеко одні від одних на нижній поверхні корпусної пластини 10 стає можливим тому, що їх точки кріплення знаходяться на зовнішньому периметрі корпусної пластини або дуже близько до нього. Аналогічно, можливо розмістити вушка, закріплені на стінці 16 кігтьової секції, далеко одні від одних, тому що вони кріпляться на придатній відстані від другого кінця кігтьової секції. В цій точці кріплення, стінка кігтьової секції є достатньо широкою для того, щоб забезпечити можливість кріплення вушок до неї з відносно великою відстанню між ними. На другій поверхні корпусної пластини, спрямованій угору, розташовані шість по суті трапецієподібних опорних пластин 34, що мають нижній край 36 та верхній край 38, які є паралельними, та два бічні краї 40, які розходяться. Опорні пластини прикріплені своїми нижніми краями до другої поверхні корпусної пластини по колу, так що разом вони утворюють закриту опорну конструкцію, яка нагадує зрізану піраміду. Розташовані поряд опорні пластини кріпляться одна до одної бічними краями. Бічна смуга верхнього краю 38 опорних пластин зігнута під кутом так, щоб зігнуті бічні смуги утворювали шестикутний фланець 42. Дві протилежні опорні пластини мають підвісні отвори 44 у фланці для з'єднувального болта (не показаний) захоплювача. Кігтьові секції 12 пересуваються між відкритим та закритим положеннями за допомогою гідравлічного циліндра 50, який розташований переважно усередині закритого простору, обмеженого опорними пластинами. Опорні пластини захищають гідравлічний циліндр від механічних напружень, що діють в напрямках зверху та збоку. На другому кінці 51b гідравлічного циліндра знаходиться з'єднувальний отвір 52, який є концентричним з підвісним отвором 44. Другий кінець гідравлічного циліндра з'єднаний із захоплювачем з'єднувальним болтом (не показаний), вставленим у фланець 42 опорної конструкції. Фіг. 2 зображує захоплювач за Фіг. 1 на виді збоку. Фігура зображує захоплювач у відкритому положенні, у якому кігтьові секції 12 повернені у положення, в якому вони розведені одна від одної. На кресленні зображені лише три передні кігтьові секції, тому що решта три кігтьові секції позаду сховані за передніми. Захоплювач перебуває у положенні, зображеному на кресленні, коли він використовується для захоплення об'єкта або розсипчастого матеріалу. Кігтьові секції переводяться у відкрите положення шляхом переміщення других кінців кігтьових секцій донизу, причому кігтьові секції обертаються навколо перших з'єднувальних болтів 28, які проходять через підвісні пластини клепаних з'єднай 14 та перші вушка. Відповідно, захоплювачі переводяться у закрите положення шляхом переміщення других кінців кігтьових секцій угору, причому кігтьові секції обертаються навколо перших з'єднувальних болтів у положення, зображене на Фіг. 1. Положення кігтьових секцій змінюється внаслідок зміни довжини гідравлічного циліндра 50 усередині захоплювача у спосіб, що буде описаний далі. Фіг. 3 зображує захоплювач за Фіг. 2 знизу. У центрі корпусної пластини 10 виконаний круглий наскрізний отвір 54, до якого підходять другі кінці ребер жорсткості 18 кігтьових секцій 12. Посередині отвору знаходиться хрестоподібне з'єднання 56, у зовнішньому периметрі якого передбачено по одній скобі 58 для кожної кігтьової секції. Скоба складається з двох паралельних, пластинчастих вушок з прорізом між ними для вставляння другого кінця ребра жорсткості. На другому кінці ребра жорсткості та у вушках скоби виконаний концентричний наскрізний отвір, до якого вставляють з'єднувальний палець. Замість з'єднувального пальця, з'єднання ребра жорсткості та скоби може бути забезпечене, наприклад, за допомогою кульового шарніру. Це дозволяє хрестоподібному з'єднанню вільно нахилятися в будь-якому напрямку, і нігтьові секції можуть змінювати своє положення відповідно до навантаження захоплювача. У центрі хрестоподібного з'єднання знаходиться прямокутний наскрізний отвір 62, у який вставлений перший кінець 51а гідравлічного циліндра. Перший кінець гідравлічного циліндра з'єднаний із хрестоподібним з'єднанням за допомогою з'єднувального пальця 64, який проходить через отвір у першому кінці циліндра. У наскрізному отворі 62 хрестоподібного з'єднання передбачені отвори з боків (не показані на кресленні) для вставляння з'єднувального пальця гідравлічного циліндра. 3 UA 98190 C2 5 10 15 20 25 Фіг. 4 зображує захоплювач за Фігурами 2 та 3 на виді знизу у косокутній проекції. Для того, щоб краще показати внутрішню конструкцію захоплювача, на кресленні видалена одна кігтьова секція 12. Положення кігтьових секцій змінюється за допомогою гідравлічного циліндра 50. Коли кігтьові секції переміщуються у відкрите положення, довжина гідравлічного циліндра збільшується внаслідок виштовхування поршня з циліндра, внаслідок чого зростає відстань хрестоподібного з'єднання 56 та прикріплених до нього других кінців кігтьових секцій від корпусної пластини 10. Кігтьові секції потім повертаються навколо перших з'єднувальних болтів 28, розходячись одна від одної у відкрите положення відповідно до Фігур 2, 3 та 4. Коли захоплювач має бути закритий, гідравлічний циліндр скорочується внаслідок втягування поршня у циліндр. Хрестоподібне з'єднання та другі кінці кігтьових секцій при цьому переміщуються в напрямку до корпусної пластини, і кігтьові секції обертаються навколо перших з'єднувальних болтів у закрите положення, зображене на Фіг. 1. Захоплювач відповідно до винаходу також включає засоби для подачі гідравлічної рідини в гідравлічний циліндр та для керування роботою гідравлічного циліндра пристрою керування. Це звичайна методика, використовувана у будівельних машинах, і тому вони не показані на фігурах. Замість гідравлічного циліндра, винахід також дозволяє використовувати деякі інші придатні привідні механізми, за допомогою яких хрестоподібне з'єднання може переміщатися по відношенню до корпусної пластини. Можна також реалізувати винахід зовсім без хрестоподібного з'єднання шляхом з'єднання одного кінця кожної кігтьової секції окремо з основною частиною захоплювача за допомогою привідного механізму, що має регульовану довжину, такого як гідравлічний циліндр. Вище були описані деякі кращі варіанти втілення захоплювача відповідно до винаходу. Винахід не обмежений описаними вище рішеннями, а винахідницька ідея може бути використана численними способами в межах обсягу винаходу, визначеного формулою винаходу. ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 60 1. Захоплювач, що має основну частину (10, 34), щонайменше дві кігтьові секції (12), шарнірно з'єднані з основною частиною, які мають перший кінець та другий кінець, та привідні механізми (50) для зміни положення кігтьових секцій, причому кігтьові секції шарнірно з'єднані другим кінцем з привідним механізмом та з основною частиною (10) на ділянці між першим та другим кінцями за допомогою клепаного з'єднання (14), який відрізняється тим, що зазначені клепані з'єднання мають дві паралельні підвісні пластини, першу підвісну пластину (22а) та другу підвісну пластину (22b), які з'єднані одна з одною трубчастою з'єднувальною тягою, зазначені підвісні пластини мають перший кінець та другий кінець, і кігтьові секції (12) мають перші вушка (26), з якими шарнірно з'єднані перші кінці підвісних пластин, а на першій поверхні корпусної пластини (10) розташовані другі вушка (30), з якими шарнірно з'єднані другі кінці підвісних пластин, і відстань між підвісними пластинами становить від 0,5 до 2,0 довжин підвісної пластини. 2. Захоплювач за п. 1, який відрізняється тим, що відстань між підвісними пластинами (22а, 22b) по суті дорівнює довжині підвісних пластин. 3. Захоплювач за п. 1 або 2, який відрізняється тим, що зазначений привідний механізм (50) для зміни положення кігтьової секції (12) є привідним механізмом, що має регульовану довжину (50), з першим кінцем (51а) та другим кінцем (51b), приєднаним своїм першим кінцем безпосередньо або через з'єднувальну деталь до другого кінця кігтьової секції (12), а своїм другим кінцем - до основної частини (10). 4. Захоплювач за п. 3, який відрізняється тим, що зазначений привідний механізм, який має регульовану довжину (50), є привідним механізмом типу поршень-циліндр, краще, гідравлічним циліндром. 5. Захоплювач за п. 3 або 4, який відрізняється тим, що має хрестоподібне з'єднання (56), другі кінці кігтьових секцій (12) шарнірно з'єднані із хрестоподібним з'єднанням, і хрестоподібне з'єднання приєднане до першого кінця (51а) привідного механізму, який має регульовану довжину (50). 6. Захоплювач за п. 5, який відрізняється тим, що має лише один привідний механізм (50) для зміни положення кігтьових секцій (12). 7. Захоплювач за будь-яким з пп. 1-6, який відрізняється тим, що основна частина включає корпусну пластину (10), яка має першу поверхню і другу поверхню та наскрізний отвір (54) посередині для привідного механізму (50), і опорні пластини (34), приєднані до другої поверхні корпусної пластини. 4 UA 98190 C2 5 8. Захоплювач за п. 7, який відрізняється тим, що опорні пластини (34) утворюють закриту опорну конструкцію для захисту привідного механізму, причому опорна конструкція має підвісний отвір (44) для приєднання захоплювача до підйомного апарата. 9. Захоплювач за будь-яким з пп. 1-8, який відрізняється тим, що зазначені другі вушка (30) розташовані на зовнішньому периметрі корпусної пластини (10) або поблизу від нього. 10. Захоплювач за будь-яким з пп. 1-9, який відрізняється тим, що кігтьові секції (12) мають пластинчасту стінку (16) та ребро жорсткості (18), приєднане до її зовнішньої поверхні. 11. Захоплювач за будь-яким з пп. 1-10, який відрізняється тим, що має шість кігтьових секцій (12), розташованих симетрично навколо уявної центральної осі захоплювача. 5 UA 98190 C2 6 UA 98190 C2 Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюGrab
Автори англійськоюPohjola, Kalle
Назва патенту російськоюЗахват
Автори російськоюПохела Калле
МПК / Мітки
Мітки: захоплювач
Код посилання
<a href="https://ua.patents.su/9-98190-zakhoplyuvach.html" target="_blank" rel="follow" title="База патентів України">Захоплювач</a>
Захоплювач вантажу
Номер патенту: 68879
Опубліковано: 10.04.2012
Автор: Мікульонок Ігор Олегович
МПК: B66C 1/44
Мітки: вантажу, захоплювач
Формула / Реферат:
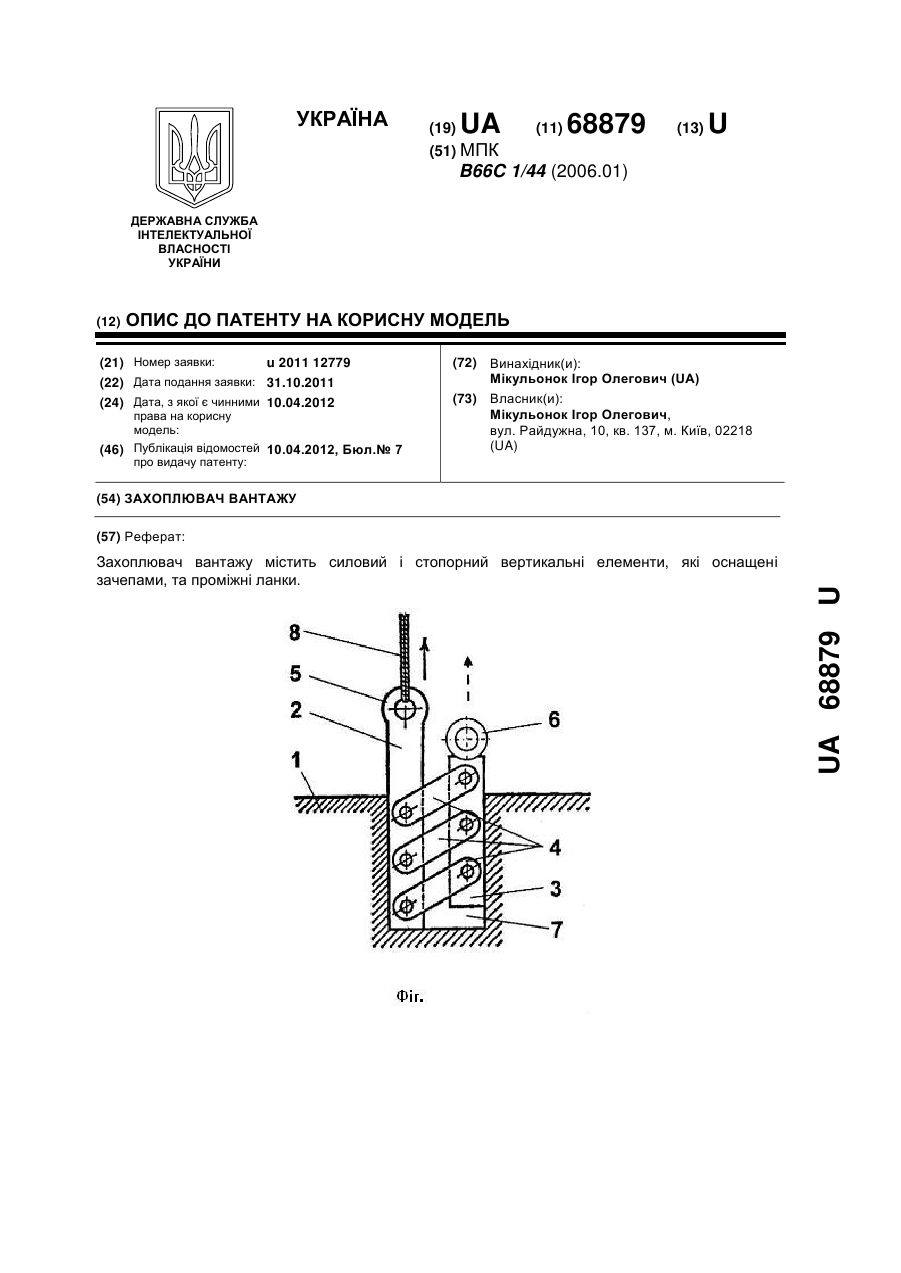
Захоплювач вантажу, що містить паралельно розміщені силовий і стопорний вертикальні елементи, шарнірно з'єднані між собою проміжними ланками, що утворюють з вертикальними елементами систему паралелограмів, при цьому силовий вертикальний елемент споряджено зачепом, який відрізняється тим, що стопорний вертикальний елемент також споряджено зачепом.
Балансирний захоплювач
Номер патенту: 38754
Опубліковано: 12.01.2009
Автори: Тонкачеєв Геннадій Миколайович, Рашківський Володимир Павлович
МПК: B66C 1/22
Мітки: захоплювач, балансирний
Формула / Реферат:
1. Балансирний захоплювач, що містить траверсу з блоками та зв'язаними через канатно-блочну систему верхньою та нижньою рамками зі штирями і механізмом керування ними, який відрізняється тим, що рамки виконані з двома штирями, направленими один до одного, з довжиною висування відносно рамки не більше половини довжини монтажного отвору колони.2. Балансирний захоплювач за п. 1, який відрізняється тим, що канати з'єднані з рамками...
Вантажопідйомний захоплювач
Номер патенту: 21323
Опубліковано: 15.03.2007
Автори: Шабалдак Микола Васильович, Шканов Олег Юхимович
МПК: B66C 1/22
Мітки: вантажопідйомний, захоплювач
Формула / Реферат:
1. Вантажопідйомний захоплювач, виконаний у вигляді скоби, яка навішена за допомогою стропа на крюк вантажопідйомного механізму і шарнірно зв'язаного зі скобою фіксатора, обладнаного замикаючим виступом, що жорстко скріплений з ним під деяким кутом, який відрізняється тим, що вантажопідйомний захоплювач обладнано сережкою, з одного боку шарнірно зв'язаною зі скобою, а з іншого боку зі стропом і фіксатором, виконаним у вигляді двох паралельно...
Струминний захоплювач

Номер патенту: 32348
Опубліковано: 15.12.2000
Автори: Проць Ярослав Іванович, Лобур Тарас Богданович, Козбур Ігор Романович, Савків Володимир Богданович
МПК: B25J 15/06
Мітки: захоплювач, струминний
Текст:
...позиціювання і вантажопідйомність захоплювача-присоса, шляхом виконання взаємодіючої з об'єктом поверхні корпуса циліндричноїформи, а його порожнину перекриває секторна вставка, утворюєм замкнуту просторову щілину, що з'єднує порожнину корпуса з атмосферою, що дозволить розширити технологічні властивості струменевогого захоплювача і підвищить його коефіцієнт корисної дії. Суть винаходу пояснюють графічні матеріали на яких зображено: фіг. 1 -...
Захоплювач кліщовий для слябів

Номер патенту: 56070
Опубліковано: 27.12.2010
Автори: Ісаков Микола Іванович, Ісакова Анна Миколаївна, Кашанський Дмитро Анатолійович, Железняк Віктор Вікторович
МПК: B66C 1/00
Мітки: слябів, захоплювач, кліщовий
Формула / Реферат:
Захоплювач кліщовий для слябів, що містить траверсу, на кінцях якої закріплені кліщі, кожні з яких містять дві кліщовини, виконані у вигляді двоплечих важелів, шарнірно прикріплених до корпусу, при цьому один кінець кожного з важелів з'єднаний з губкою, а другий - шарнірно з'єднаний з тягою, другий кінець якої прикріплений до траверси, причому губка шарнірно з'єднана з корпусом за допомогою шатуна, який відрізняється тим, що оснащений двома...
Попередній патент: Спосіб стикування фундаменту з трубобетонною колоною
Наступний патент: Спосіб підготовки твердого палива
Випадковий патент: Ролик стрічкового конвеєра