Підйомник для транспортного засобу
Номер патенту: 9870
Опубліковано: 30.09.1996
Автори: Штихлайтнер Йосиф Коломанович, Маліборський Василь Сергійович, Тихоход Олександр Олександрович, Лінецький Анатолій Гершович
Формула / Реферат
(57) Подъемник для транспортного средства, содержащий стойки с вертикальными направляющими, в которых установлены грузоподъемные каретки с площадками для транспортного средства, механизмы вертикального перемещения упомянутых кареток, каждый из которых включает в себя размещенный вдоль соответствующей стойки связанный с электроприводом винт с грузовой и страховочной гайками, с которыми соединена каретка этой стойки, и устройство управления перемещением кареток, включающее в себя блок задания программ микропроцессора, размещенные на каждой стойке сигнализаторы крайних положений соответствующей каретки и аварийные выключатели, а также приспособления преобразования вращения винтов механизмов вертикального перемещения кареток, отличающийся тем, что устройство управления перемещением кареток снабжено сигнальными устройствами положения транспортного средства на каретках, подключенными к блоку задания программ регистрами опроса состояния и запоминания этого состояния приспособлений преобразования винтов всех стоек, упомянутых сигнальных устройств, сигнализаторов крайних положений кареток и кнопок включения электроприводов винтов стоек и регистром управления этими электроприводами, при этом каждое приспособление преобразования вращения соответствующего винта содержит крыльчатку, соединенную с этим винтом в зоне его верхней опоры, и размещенный с возможностью взаимодействия с лопастями крыльчатки щелевой индуктивный преобразователь.
Текст
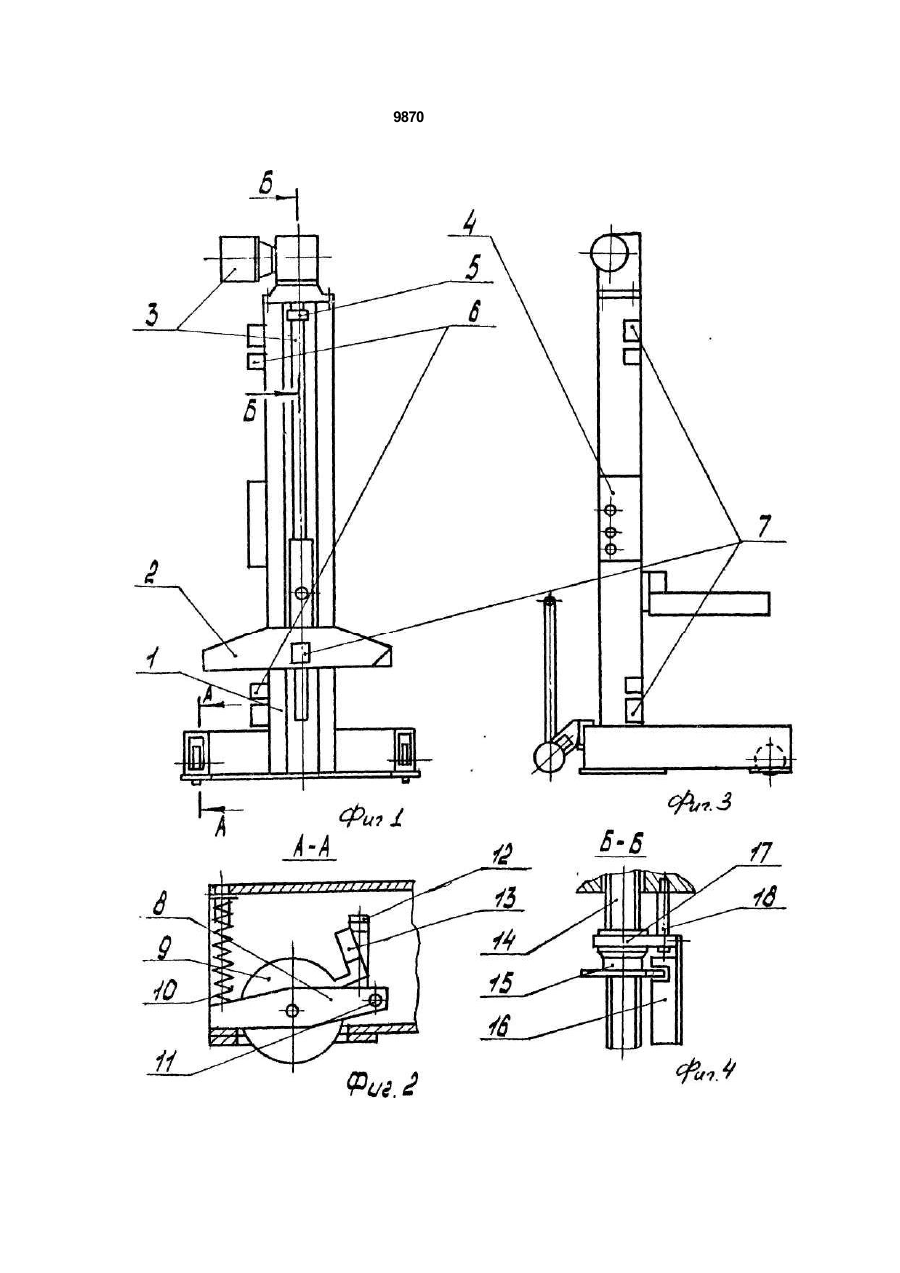
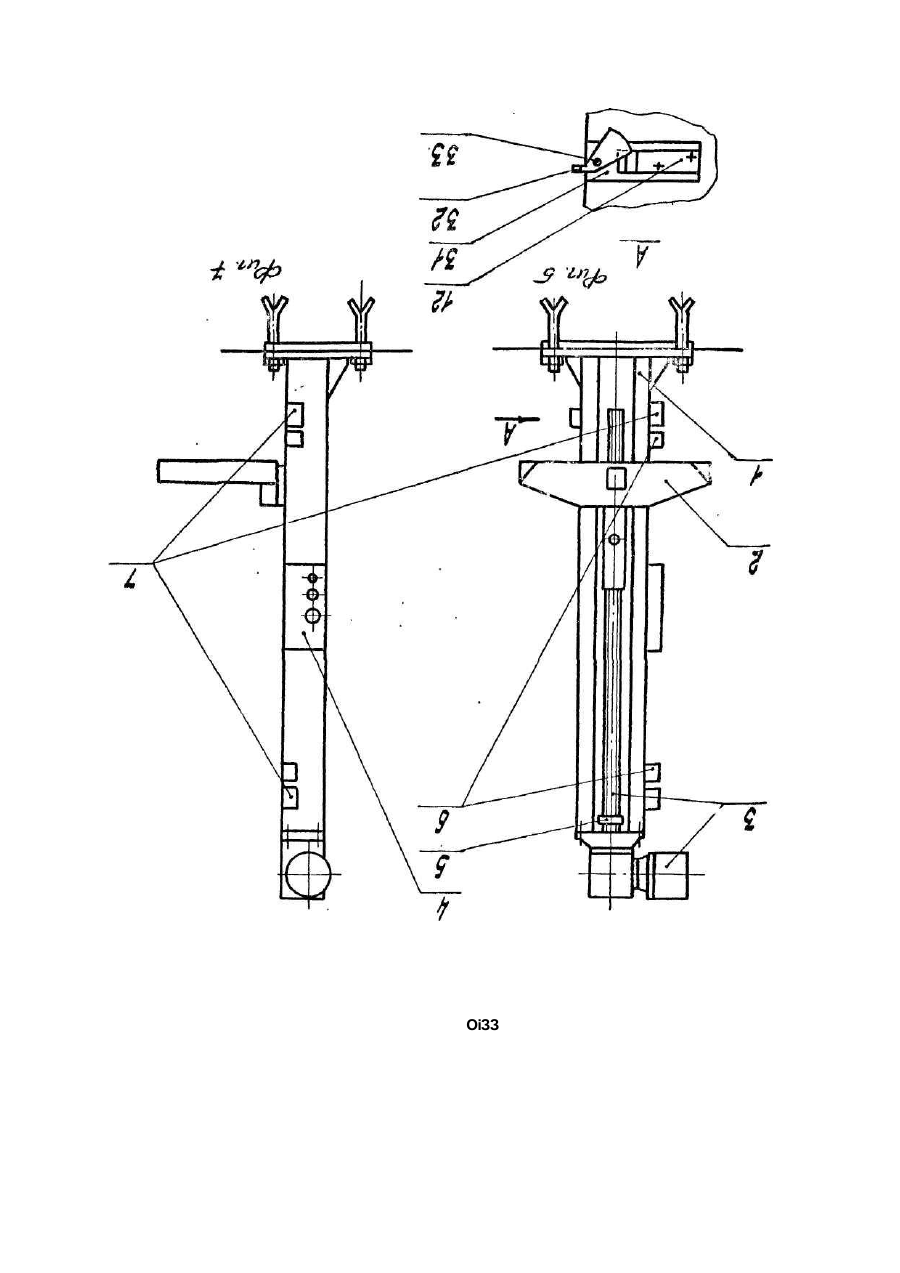
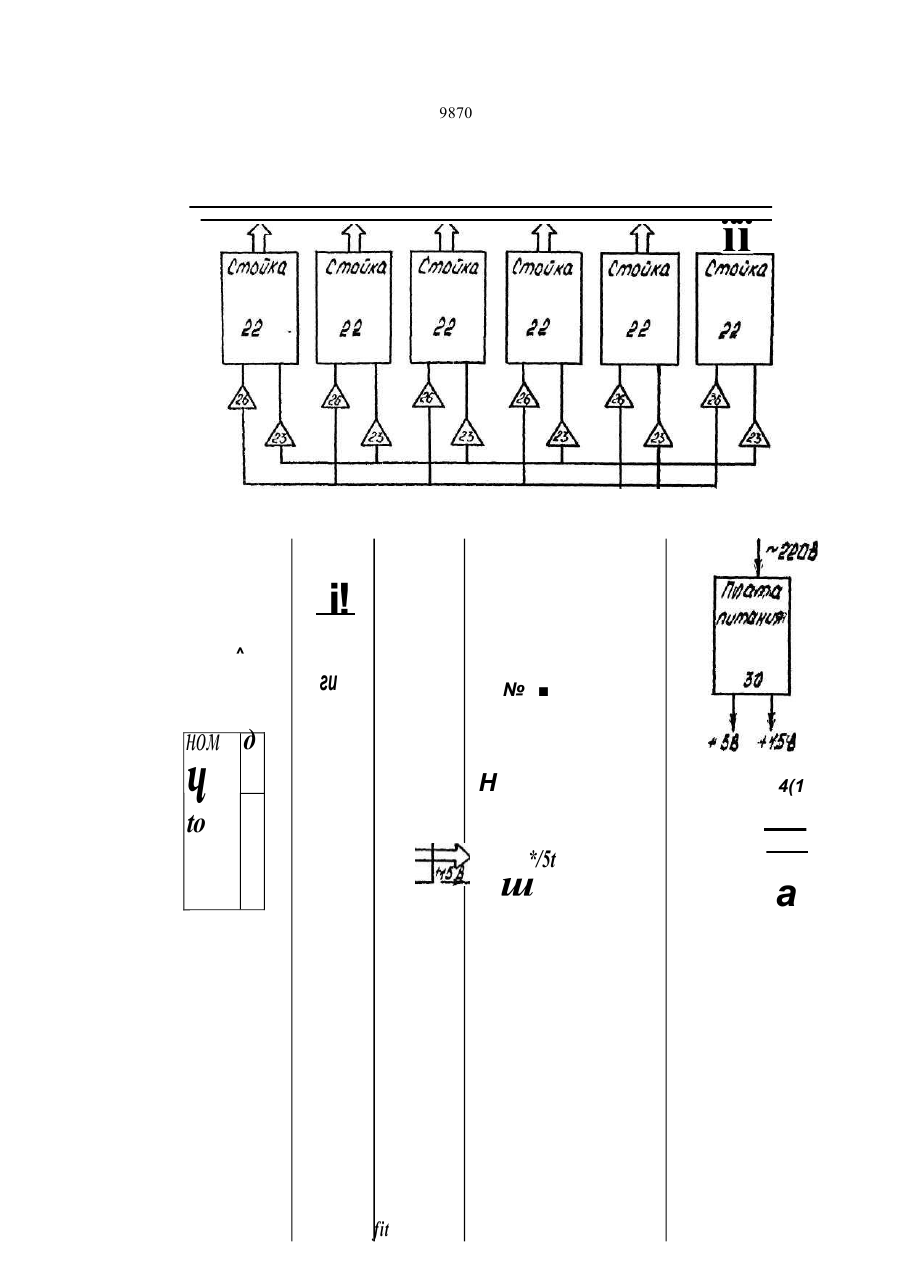
Подъемник для транспортного средства, содержащий стойки с вертикальными на правляющими, в кбторых установлены гру зоподъемные каретки с площадками для транспортного средства, механизмы верти кального перемещения упомянутых каре ток, каждый из которых включает в себя размещенный вдоль соответствующей стой ки связанный с электроприводом винт с гру зовой и страховочной гайками, с которыми соединена каретка этой стойки, и устройство управления перемещением кареток, включающее в себя блок задания программ микропроцессора, размещенные на каждой стойке сигнализаторы крайних положений соответствующей каретки и аварийные выключатели, а также приспособления преобразования вращения винтов механизмов вертикального перемещения кареток, о тл и ч а ю щ и й с я тем, что устройство управления перемещением кареток снабжено сигнальными устройствами положения транспортного средства на каретках, подключенными к блоку задания программ регистрами опроса состояния и запоминания этого состояния приспособлений преобразования винтов всех стоек, упомянутых сигнальных устройств, сигнализаторов крайних положений кареток и кнопок включения электроприводов винтов стоек и регистром управления этими электроприводами, при этом каждое приспособление преобразования вращения соответствующего винта содержит крыльчатку, соединенную с этим винтом в зоне его верхней опоры, и размещенный с возможностью взаимодействия с лопастями крыльчатки щелевой индуктивный преобразователь. Изобретение относится к подъемнотранспортному оборудованию, в частности, к конструкции подъемников для подъема автотранспорта. Известна конструкция подъемника, содержащего стойки, направляющие подъем ные механизмы в виде кареток с электромеханическими винтовыми приводами, на винтах которого смонтированы грузовые и страховочные гайки, нижний и верхний концевые выключатели на стойках, выключаю 00 о ы О 9870 щие привод при достижении кареткой крайних рабочих положений (1). Подъемник является устройством, эксплуатируемым для обслуживания изделий больших габаритов и веса, поэтому одним из основных требований, предъявляемых к его конструкции, является требование безопасности. В конструкции подъемника (1) безопасность эксплуатации обеспечивается контролем износа грузовой гайки посредством упоров, шарнирно смонтированных на страховых гайках, взаимодействующих с нижними конц евым и выключ ателя ми . Эта конструкция дополнена в подъемнике (2) дополнительными нижними аварийными выключателями, взаимодействующими с дополнительными упорами при отказе нижних концевых выключателей. Конструкции подъемников (1,2) присущ ряд недостатков, делающий их эксплуатацию небезопасной, Прежде всего в их конструкции не учтена возможность выхода из строя верхнего концевого выключателя, что в эксплуатации при отказе вышеупомянутого выключателя приводит к аварийной ситуации. Далее, контроль износа грузовой гайки посредством упоров, взаимодействующих с нижним концевым (1) или нижним аварийным (2) - выключателем недостаточен, так как не предусмотрено отключение электромеханического привода при срезе резьбы гайки в рабочем положении каретки, кроме крайнего нижнего. Наконец, при подъеме транспортного средства вследствие различных причин (разная нагрузка на каретки, разброс параметров электромеханических винтовых приводов, зависимость частоты вращения электродвигателей электромеханических винтовых приводов от нагру зк и и т. п . ) в озм ож но н а руш е ни е горизонтального (или другого заданного) положения транспортного средства - так называемый несинхронный подъем. Известен подъемник для транспортного средства (прототип - [3J, содержащий стойки с вертикальными направляющими, в которых установл ены грузоподъемные каретки с плрщадками для транспортного средства, механизмы вертикального перемещения упомянутых кареток, каждый из которых включает в себя размещенный вдоль соответствующей стойки связанный с электроприводом винт с грузовой и страховочной гайками, с которыми соединена каретка этой стойки, и устройство управления перемещением кареток, включающее в себя блок задания программ микропроцессора, размещенные на каждой стойке сигнализаторы крайних положений соответствующей 5 10 15 20 25 30 35 40 45 50 55 каретки и аварийные выключатели, а также приспособления преобразования вращения винтов механизмов вертикального перемещения кареток. Недостатком данной конструкции является то, что в целом ряде ситуаций, встречающихся при эксплуатации, при неверном захвате каретки транспортного средства вильчатым захвате каретки, обломе вильчатого захвата каретки, смещении транспортного сред ства при под ъеме , ош ибке оператора в установке допустимого, часто требуемого при обслуживании, начального - наклонного положения транспортного средства; микропроцессорное управление, используя только зависимые от скорости движения сигналы преобразователей, установленных в каретках, будет продолжать синхронизацию подъема кареток и предотвратить аварию не сможет. Кроме того, установка устройства преобразовател я движения подъемного механизма в подвижной каретке и выполнение его как преобразователя частоты вращения винта электромеханического привода небезопасно, так как предполагает подвижную электричес кую свя зь пре образ ова тел я с управлением, возможность повреждения преобразователя при движении, снижении точности преобразования скорости подъема каретки, а следовательно, точности синхронизации подъема, а из-за износа винта электромеханического привода со временем. - В основу изобретения поставлена задача создания такой конструкции подъемника, в которой решения о начале, поддержке и прекращении режима синхронизации при подъеме микропроцессорным управлением принимались бы на основе совместного анализа информации как о скорости движения кареток, так и взаимного положения подъемника и обслуживаемого транспортного средства; одновременно ставилась задача повысить точность синхронизации подъема и сохранение указанной точности на все время эксплуатации. Указанный технический результат повышает безопасность работы подъемника, его надежность и, естественно, безопасность обслуживающего персонала, транспортных средств, что, в конечном итоге, выражается и в экономическом эффекте. Поставленная задача решается тем, что в подъемнике для транспортного средства, содержащем стойки с вертикальными направляющими, в которых установлены грузоподъемные каретки с площадками для транспортного средства, механизмы вертикального перемещения упомянутых каре 9870 ток, каждый из которых включает в себя транспортного средства на каретках (разрез размещенный вдоль соответствующей стойки А-А). Последние из упомянутых устройств в связанный с электроприводом винт с грузовой первом варианте исполнения подъемника и страховочной гайками, с которыми размещены в лапах каждой стойки подъемсоединена каретка этой стойки, и устройст- 5 ника и состоят из рамы 8, на оси которой во перемещением кареток, включающее в себя установлено колесо 9, одна сторона которой блок задания программ микропроцессора, подпружинена пружиной 10, а вторая заразмещенные на каждой стойке сигна- креппена в пооеме лапы е помощью шпильлизаторы крайних положений ки 11. В проеме лапу закреплен соответствующей каретки и аварийные вы- Ю преобразователь 12 индуктивный щелевой ключатели, а также приспособления преоб- и флажок 13 с упором на раму. Приспособразования вращения винтов механизмов ление преобразования движения электровертикального перемещения кареток, со- механического привода 5 (размещено на гласно изобретению, устройство управления винте, у верхней опоры - см, разрез Б-Б) перемещением кареток снабжено 15 состоит из закрепленной на винте 14 крыльсигнальными устройствами положения чатки 15 и преобразователя индуктивного транспортного средства на каретках, под- щелевого 16, закрепленного на винте 14 ключенными к блоку задания программ ре- вильчатым кронштейном 17. Для предотврагистрами опроса состояния и запоминания щения поооротов вильчатого кронштейна этого состояния приспособлений винтов 20 возможных при движении винта, кроншвсех стоек, упомянутых сигнальных уст- тейн застопорен шпилькой 13, укрепленной ройств, сигнализаторов крайних положений в верхнюю опору. Функциональная схема устройства упкареток и кнопок включения электроприводов винтов всех стоек и регистром управления равления подъемными механизмами 4 покаэтими электроприводами, при этом 25 зана на фиг.З. В качестве анализирующего каждое приспособление преобразования логического элемента применена однокривращения соответствующего винта содержит стальная 8-разрядная микро-ЭВМ КР 1816 крыльчатку, соединенную с этим винтом в ВЕ35 (поз.19). Память денных и программ Зоне его верхней опоры, и размещенный с работы подъемника зашита в постоянном возможностью взаимодей- 30 ствия с запоминающем устройстве (ПЗУ) КР 573 лопастями крыльчатки щелевой индуктивный РТ5 (поз.20). Регистр RG 21 предназначен для опроса преобразователь. Изобретение иллюстрируется чертежами, приспособлений преобразования вращения винтов, сигнализаторов крайних положений где на фиг.1 показан общий вид одной из кареток, сигнальных устройств положения стоек подъемника (первый вариант); на 35 кареток и обслуживаемого транспортного фиг.2 - разрез А-А фиг.1; на фиг.З - вид сбоку (первый вариант), на фиг.4 - разрез Б-Б средства и кнопок управления стоек 22 посредством ключей 23, а регистр RG 24 предфиг.1, на фиг.5 - общий вид одной из стоек назначен для запоминания состояния подъемника (второй вариант), на фиг.6 - вид В вышеупомянутых устройств. Регистр RG 25 фиг.5, на фиг.7 - вид сбоку (второй 40 предназначен для управления посредством вариант), на фиг.8 - схема устройства управключей 26 электромеханическими винтовыления. Подъемник (см. фиг.1) содержит стойки 1 ми приводами 3 и реверсными магнитными (передвижные в первом варианте), в вер- пускателями К1, К2 - 27, 28. Оптоэлектронтикальных направляющих стоек 1 установ- 45 ная развязка 29 служит для гальванического лены каретки 2 с площадками для разделения (с целью защиты микропроцестранспортного средства. Каретки 2 связаны с сора) от трехфазной сети. Микропроцессор, механизмами их вертикального перемещения, регистры, ключи, оптоэлектронная развязка включающими каждый электромеханический и все вышеупомянутые устройства стоек завинтовой привод 3. Грузовая и 50 питываются от платы питания 30. Во втором варианте исполнения стойки страховочная гайки каждого механизма (на яерт. не показаны) связаны с соответствующей 1 закреплены стационарно. Сигнальное ускареткой 2. Устройство управления пе- тройство взаимобезопасного положения ремещением 4 кареток 2 содержит обслуживаемого транспортного средства и приспособления 5 преобразования движе- 55 подъемника размещено на стойке 1 с возния электромеханического винтового привода можностью изменения положения по высо3, сигнализаторы 6 крайних положений кареток ты стойки, и его преобразователь 12 2, аварийные выключатели 7, срабатывающие индуктивный щелевой закреплен на корпупри срезе резьбы грузовой части гайки, се 31 устройства, а флажок 32 установлен на оси 33. сигнальные устройства положения 9870 Конструкция и размещение устройства движения подъемных механизмов, состав и организация управления на основе микропроцессора идентично первому варианту исполнения (подвижный подъемник). Подъемник работ а г следующим образом. При включенном питании управления подъемными механизмами (механизмами вертикального перемещения кареток2) микропроцессор постоянно опрашивает состояние всех вышеупомянутых устройств и кнопок стоек. При упоре вильчатого захвата каретки 2 в транспортное средство должно происходить срабатывание обоих сигнальных устройств положения транспортного средстве, под действием нагрузки колесо 9 поворачт а^т рзму 8 вокруг шпильки 11, сжимал пружину 10, при этом флажок 13 заходит в преобразователь индуктивный щелевой 12. Совместное срабатывание обоих преобразователей индуктивных щелевых формирует сигнал из микропроцессор. Физически это означает, что нагрузка на вильчаты й захват каретки распределена равномерно, стойка не перекошена, движение каретки подъемного механизма в этой стойке безопасно. При нажатой кнопке "Вверх" микропроцессор через регистр RG 25 ключом 26 включает магнитный пускатель К1 - 27 или К2 - 28 соответственно направлению движения и чередования фаз в сети. Анализируя информацию от стойки, микропроцессор определяет состояние сигнального устройства крайнего верхнего положения каретки. При наличии сигнала о срабатывании упомянутого устройства микропроцессор блокирует возможность включения электромех анических винтовых приводов 3 всех стоек или выключает их движение. При отсутствии сигналов от сигнальных устройств крайнего верхнего положения каре гок микропроцессор определяет наличие сигнала от пар сигнальных устройств взаимобезопасного положения подъемника и транспортного средства и, при его наличии от пары упомянутых устройств конкретной стойки, проверяет, находится ли в его памяти информация о срабатывании остальных пар упомянутых сигнальных устройств других стоек. В этом случае микропроцессор включает электромеханический привод 3 всех стоек для синхронного подьема, так как совместное состояние всех упомянутых сигнальных устройств (их срабатывание) физически означает безопасное положение транспортного средства относительно подъемника. При отсутствии в памяти микропроцессора информации о срабатывании остальных пар упомянутых сигнальных уст 8 ройств микропроцессор блокирует движение каретки конкретной стойки и переходит яа опрос и анализ информации от следующих стоек. 5 При отсутствии сигнала от пары упомянутых сигнальных устройств конкретной стойки микропроцессор позволяет продолжать движение каретки ее подъемному механизму и переходит к опросу и анализу 10 информации следующих стоек - в любом случае микропроцессор устанавливает коллективный (синхронный) подъем только при наличии информации, что все упомянутые сигнальные устройства положения подъем15 иика и обслуживаемого транспортного средства для стоек, подключенных к управлению, сработали. При синхронном подъеме микропроцессор постоянно с частотой 100-200 Гц 20 ведет опрос стоек, анализируя информационные сигналы от трех видов устройств преобразования движения подъемных механизмов, пар сигнальных устройств о взаимобезопасном положении подъемника и 25 транспортного средства, сигнальных устройств крайних положений кареток (верхних ил и нижних - в зависимости от направления движения). При этом сигнал с приспособления пре30 образования вращения винта 5, представл яющ ий соб ой пос л ед овател ьн ост ь электрических импульсов, формируемых при вращении крыльчатки 15 (см. разрез Б-Б) относительно преобразователя индук35 тивного щелевого 16; частота которого пропорц ионал ьна час тоте вращ ения крыльчатки 15, фиксируется и запоминается микропроцессором как информация об изменении состояния вышеупомянутого 40 приспособления. За определенное количество циклов опроса стоек микропроцессор анализирует информацию, во-первых, на наличие заданного числа изменений состояний устройст45 ва. Если заданное число не подтверждается, микропроцессор выключает все электромеханические приводы 3 и блокирует возможность их повторного включения, так как это означает неисправ50 ность электромеханического привода 3. перегрузку стойки подъемника, неисправность питающей сети. Подтверждение (и более) числа изменений состояний устройства физически означает исправную 55 работу электромеханического привода, нормальную загрузку каретки. При выполнении этого условия микропроцессор, вовторых, анализирует информацию на заданную в памяти разность изменений состояний приспособлений преобразования 9870 10 движения относительно наименьшего по в памяти микропроцессора информации стойкам значения. При получении разности аналогичных сигнальных устройств микроизменения состояний больше заданной процессор блокирует движение каретки микропроцессор производит корректиров- конкретной стойки, переходит к опросу дру-5 ку движения подъемных механизмов, от- гих стоек, одновременно накапливая инключая электромеханический привод формацию о количестве изменений стойки, для которой эта разность зафикси- состояний приспособлений преобразования рована. Движение каретки по стойке возоб- движения подъемных механизмов этих стоек новляется, если разность скорректирована. и проверяя ее на заданное значение. Одновременно при каждом опросе стойки 10 Если зафиксировано количество изменений состояний приспособлений преобразовамикропроцессором проверяется состояние ния вращения винтов подъемных механизсигнальных устройств крайнего верхнего мов больше заданного хотя бы для одной (нижнего) положения и сигнальных устстойки, микропроцессор отключает все ройств взаимобезопасного положения обслуживаемого транспортного средства и 15 электромеханические приводы и блокирует повторный пуск подъемника, так как физиподъемника. Сигнал хотя бы от одного сигчески это означает или неисправность однонального устройства крайнего положения го из сигнальных устройств или отсутствие сигнала от пары вышеупомявзаимобезопасного положения обслуживанутых сигнализаторов положения приводит к отключению микропроцессором всех элек- 20 емого транспортного средства и подъемника, или же положение транспортного троприводов и к блокировке повторного пусредства относительно подъемника небезоска, ибо физически это означает аварийную ситуацию как следствие надлома вилки капасно. ретки, перекоса транспортного средства Если количество изменений состояний или стойки при подъеме или, наконец, окон- 25 приспособлений преобразования вращечание подъема. ния винтов подъемных механизмов для всех стоек меньше заданного, движение кареток Работа подъемника во втором варианте исполнения (стационарный) в целом аналопродолжается до срабатывания упомянутых гична описанной для первого варианта, за сигнальных устройств. Коллективный (сикхисключением следующих особенностей. 30 ронный) подъем устанавливается, как и в При движении каретки подъемного мехаконструкции для первого (подвижного) иснизма по стойке срабатывание сигнального полнения, только в том случае, если срабоустройства положения обслуживаемого тали все вышеупомянутые сигнальные транспортного средства относительно устройства. подъемника происходит так: каретка толка- 35 ет флажок 32, который, поворачиваясь вокИзменение положения сигнальных уструг оси 33, заходит в преобразователь ройств взаимобезопасного положения обиндуктивный щелевой 12, сигнал от которослуживаемого транспортного средства и го поступает на микропроцессор и анализиподъемника по высоте стойки позволяет соруется. 40 здать при подъеме положение транспортного При обнаружении срабатывания упомя- средства, удобное для обслуживания и в то нутого сигнального устройства и отсутствии же время с требуемой безопасностью. 9870 ОіЗЗ 9870 її і! ^ ги № ном д ч H 4(1 to */5t ш fit a Упорядник Замовлення 4555 Техред М.Моргентал Коректор А. Обручар Тираж Підписне Державне патентне відомство України, 254655, ГСП, КиТв-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюHoist for transport vehicle
Автори англійськоюLinetskyi Anatolii Hershovych, Shtykhlaitner Yosyf Kolomanovych, Maliborskyi Vasyl Serhiiovych, Tykhokhod Oleksandr Oleksandrovych
Назва патенту російськоюПодъемник для транспортного средства
Автори російськоюЛинецкий Анатолий Гершович, Штихлайтнер Иосиф Коломанович, Малиборский Василий Сергеевич, Тихоход Александр Александрович
МПК / Мітки
Мітки: підйомник, транспортного, засобу
Код посилання
<a href="https://ua.patents.su/9-9870-pidjjomnik-dlya-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Підйомник для транспортного засобу</a>
Механізм переміщення колеса транспортного засобу у вертикальній поздовжій площині
Номер патенту: 815
Опубліковано: 01.01.1993
Автор: Москаль Григорій Євдокимович
МПК: B62D 53/00
Мітки: колеса, поздовжій, механізм, площині, транспортного, засобу, переміщення, вертикальний
Формула / Реферат:
Механизм перемещения колеса транспортного средства в вертикальной продольной плоскости, содержащий приводной винт, закрепленную на оси транспортного средства с возможностью вращения в вертикальной плоскости двуплечую стойку, на одном конце которой установлено колесо, отличающийся тем, что, с целью упрощения конструкции и расширения эксплуатационных возможностей, устройство снабжено установленным на приводном валу вильчатым ползуном,...
Пристрій для кріплення великогабаритних вантажів на платформі транспортного засобу
Номер патенту: 4601
Опубліковано: 28.12.1994
Автори: Малов Арнольд Дмітрієвіч, Завгородній Іван Павлович, Шінкарєнко Владімір Ніколаєвіч, Лавренов Борис Миколайович
МПК: B60P 7/06
Мітки: кріплення, пристрій, транспортного, вантажів, засобу, платформи, великогабаритних
Формула / Реферат:
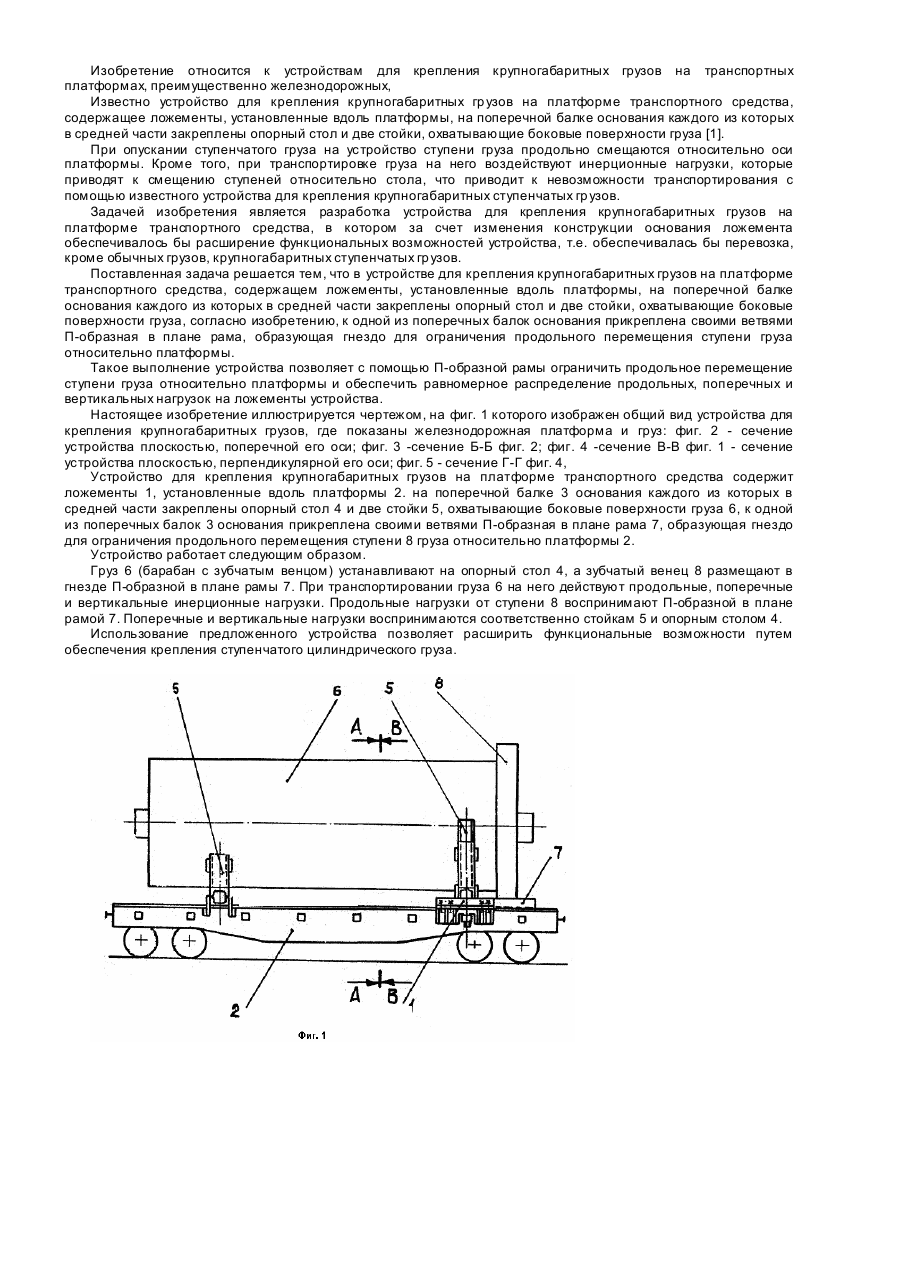
Устройство для крепления крупногабаритных грузов на платформе транспортного средства, содержащее ложементы, установленные вдоль платформы, на поперечной балке основания каждого из которых в средней части закреплены опорный стол и две стойки, охватывающие боковые поверхности груза, отличающееся тем, что к одной из поперечных балок основания прикреплена своими ветвями П-образная в плане рама, образующая гнездо для ограничения продольного...
Пристрій управління гальмом транспортного засобу
Номер патенту: 7070
Опубліковано: 31.03.1995
Автор: Каменев Василь Ніонілович
МПК: B60T 7/00
Мітки: транспортного, управління, пристрій, гальмом, засобу
Формула / Реферат:
(57) Устройство управления тормозом транспортного средства, содержащее рычаг педали, установленный на оси в кронштейне с возможностью поворота, зубчатый элемент, выполненный на рычаге педали, собачку фиксации рычага педали и механизм ее привода, снабженный рукояткой, отличающееся тем, что головка собачки выполнена на рукоятке механизма привода, при этом устройство снабжено пружиной с V-образными концами, охватывающей с двух сторон головку...
Обладнання для навіски кришки вентиляційного люка транспортного засобу
Номер патенту: 3832
Опубліковано: 27.12.1994
Автори: Хомяк Роман Семенович, Покотило Анатолій Михайлович
МПК: B60J 9/00
Мітки: навіски, кришки, засобу, вентиляційного, обладнання, люка, транспортного
Формула / Реферат:
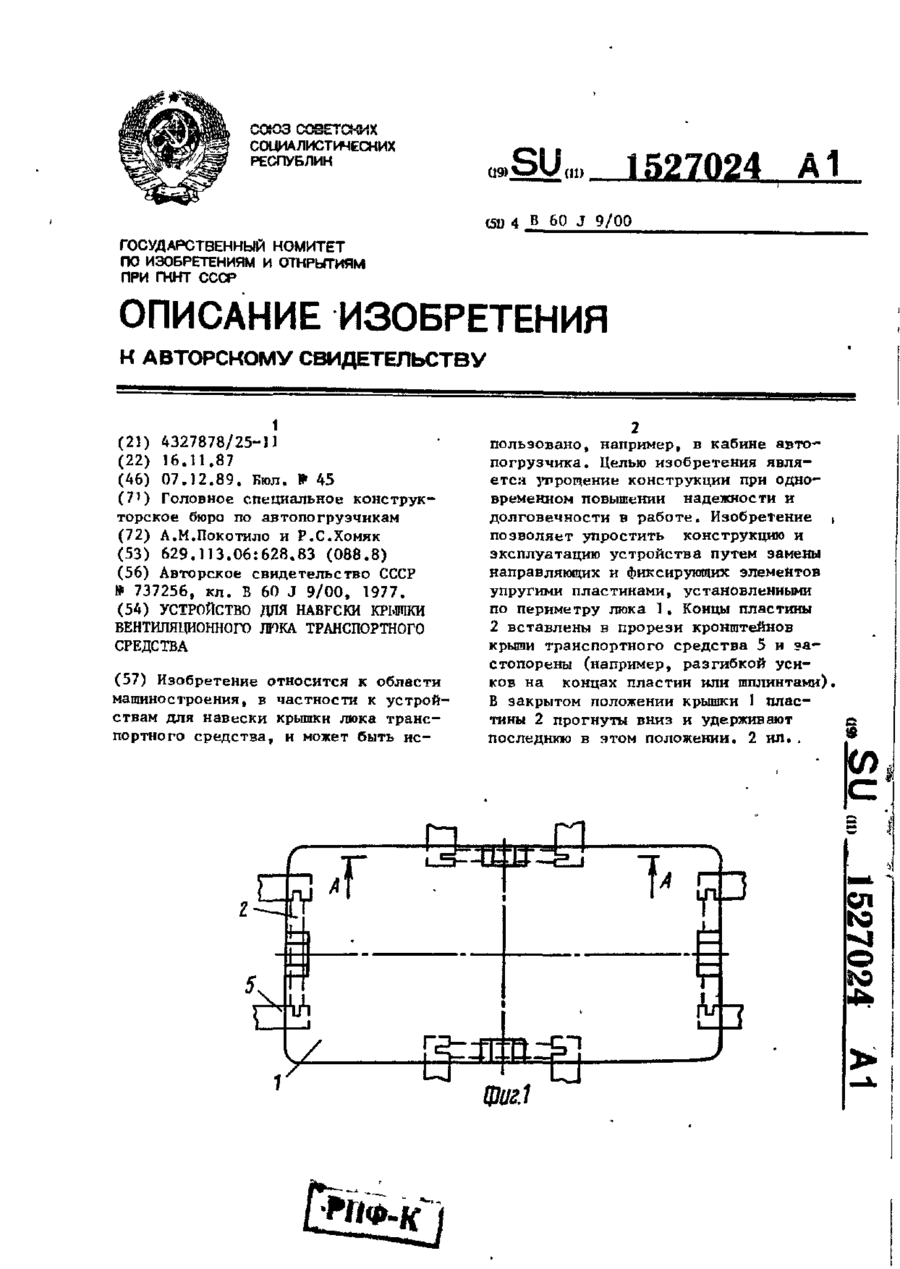
Устройство для навески крышки вентиляционного люка транспортного средства, содержащее направляюще-фиксирующие элементы, расположенные по периметру люка и установленные в кронштейнах крышки транспортного средства с возможностью обеспечения перемещения закрепленной на этих элементах крышки люка в открытое и закрытое фиксированные положения, отличающееся тем, что, с целью упрощения конструкции при одновременном повышении надежности и...
Механізм дистанційного управління коробкою передач транспортного засобу
Номер патенту: 207
Опубліковано: 30.04.1993
Автори: Каскін Юхим Володимирович, Самохвалова Неля Тимофіївна
МПК: B60K 20/02
Мітки: коробкою, транспортного, засобу, дистанційного, передач, механізм, управління
Формула / Реферат:
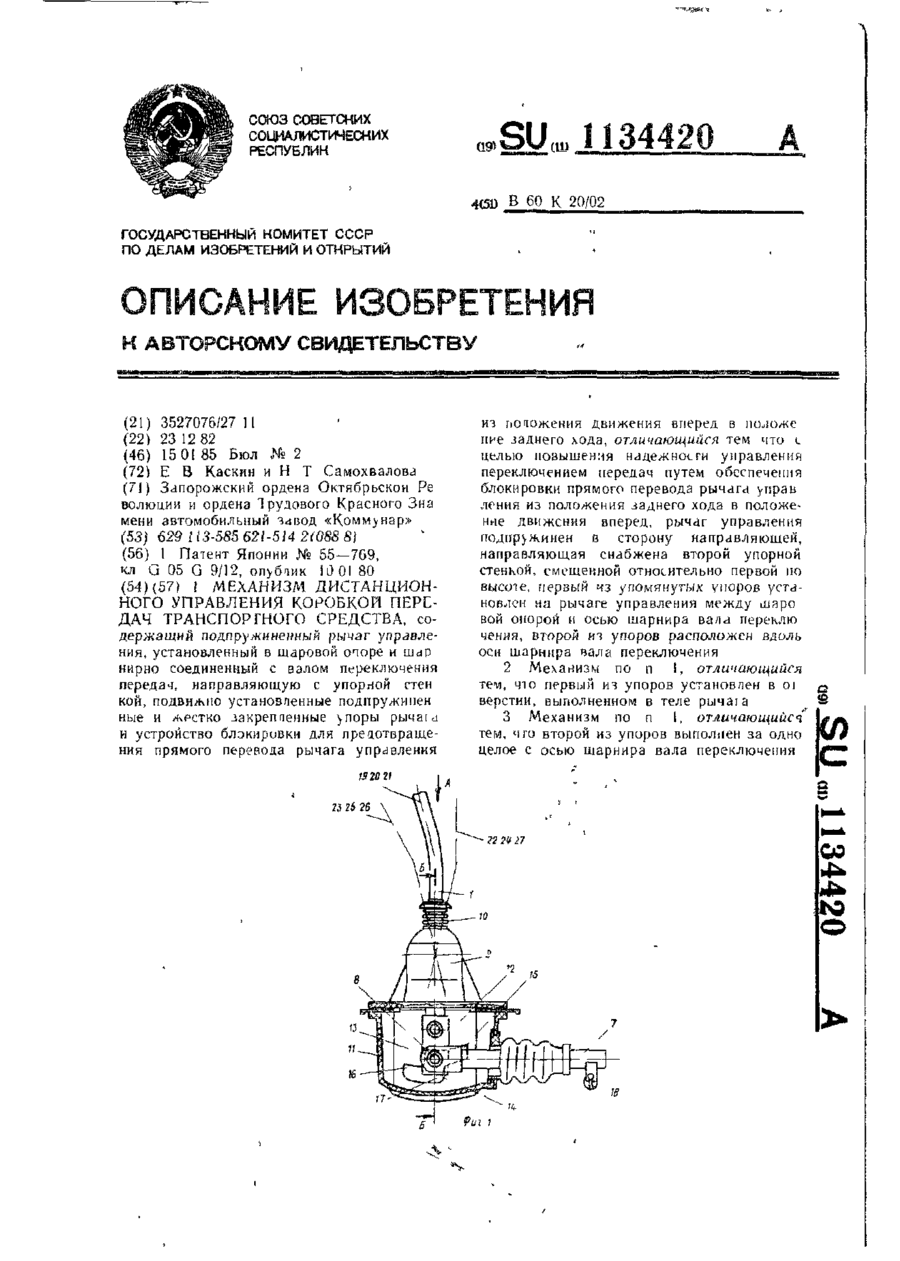
(57) 1. Механизм дистанционного управления коробкой передач транспортного средства, содержащий подпружиненный рычаг управления, установленный в шаровой опоре и шарнирно соединенный с валом переключения передач, направляющую с упорной стенкой, подвижно установленные подпружиненные и жестко закрепленные упоры рычага и устройство блокировки для предотвращения прямого перевода рычага управления из положения движения вперед в положение заднего...