Маніпулятор дробоструменевого очищення
Номер патенту: 105279
Опубліковано: 25.04.2014
Автори: Шулянський Григорій Анатолійович, Ландар Анатолій Антонович, Горик Олексій Володимирович, Чернявський Анатолій Миколайович
Формула / Реферат
1. Маніпулятор дробоструменевого очищення знежирених порожнин суцільнозварних корпусів хімічних апаратів, який містить вертикальну стійку з надітою обоймою, яка утворює поступальну пару з горизонтальною штангою, що несе механічну руку, який відрізняється тим, що механічна рука виконана у вигляді штока з нарізаною зубчатою рейкою, утворюючи зі штангою дворухливу кінематичну пару обертально-поступального пересування, і є вихідною ланкою дворухливого виконавчого механізму обертально-поступального переміщення механічної руки.
2. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що дворухливий виконавчий механізм обертально-поступального переміщення механічної руки виконаний у вигляді фланцевої цапфи, яка встановлена в штанзі, своєю зовнішньою поверхнею утворює обертальну пару з нею і має два крізні отвори, осі яких перехрещені під прямим кутом, центральний по осі і тангенціальний у фланці, через який пропущений шток, а через центральний отвір проходить вал, на вихідній ділянці якого закріплена шестірня, що зачіпляється із зубчатою рейкою, нарізаною на штоку.
3. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що на тильній стороні горизонтальної штанги встановлений слідкуючий механізм, який виконаний аналогічно дворухливому виконавчому механізму обертально-поступального переміщення механічної руки.
4. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що виконавчий механізм обертально-поступального переміщення механічної руки і слідкуючий механізм зв'язані між собою трансмісійним валом і гнучкою ланкою, при цьому трансмісійний вал за допомогою зубчатих передач сполучає вали для зміни вильоту штоків, а гнучка ланка через шківи сполучає цапфи, що здійснюють поворот механічних рук щодо штанги.
5. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що штанга маніпулятора оснащена задавальним приводом для здійснення задавального руху, тобто повороту механічної руки, слідкуючим приводом для змінювання довжини (вильоту) механічної руки залежно від кута повороту, і осцилюючим приводом для здійснення гармонійних коливань механічної руки.
6. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що на тильній стороні штанги за слідкуючим механізмом встановлений проміжний вал з двома вихідними ділянками, який за допомогою гнучкої ланки приєднаний до цапфи слідкуючого механізму, при цьому до однієї з вихідних ділянок проміжного вала приєднаний через керовану муфту задавальний привід, а до іншої вихідної ділянки приєднаний за допомогою керованої муфти осцилюючий привід, вихідним передавальним механізмом якого є кривошипно-шатунний механізм з повзуном, що коливається.
7. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що слідкуючий привід приєднаний до виконавчого механізму обертально-поступального переміщення механічної руки через вал для зміни вильоту механічної руки слідкуючого механізму за допомогою зубчатих передач.
Текст
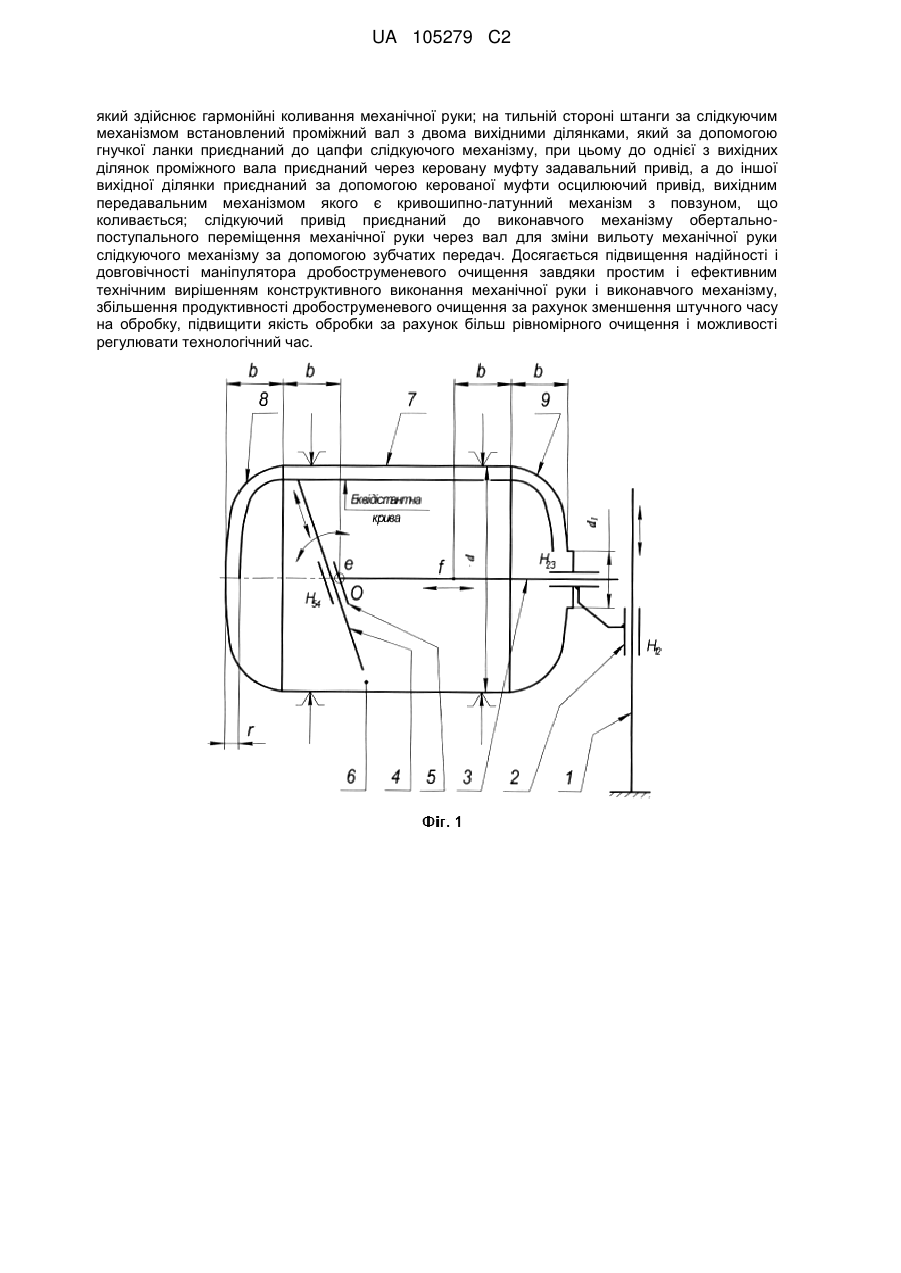
Реферат: Винахід належить до області хімічного машинобудування, а саме до пристроїв для очищення знежирених порожнин суцільнозварних корпусів хімічних апаратів, виконаних у вигляді циліндрової обичайки з привареними еліптичними днищами, одне з яких має центральний люк, від окалини, іржі, пригару, зварювального флюсу, старого захисного покриття і тому подібне. Маніпулятор дробоструменевого очищення містить вертикальну стійку з надітою обоймою, яка утворює поступальну пару з горизонтальною штангою, що несе механічну руку, виконану у вигляді штока з нарізаною зубчатою рейкою, який утворює зі штангою дворухливу кінематичну пару обертально-поступального пересування і є вихідною ланкою дворухливого виконавчого механізму обертально-поступального переміщення механічної руки, який виконаний у вигляді фланцевої цапфи, яка своєю зовнішньою поверхнею утворює обертальну пару зі штангою і має два крізні отвори, осі яких перехрещені під прямим кутом, центральний по осі і тангенціальний у фланці, через який пропущений шток, а через центральний отвір проходить вал для зміни вильоту штока з закріпленою на консолі шестірнею, що входить в зачеплення із зубчатою рейкою, нарізаною на штоку. На тильній стороні горизонтальної штанги встановлений слідкуючий механізм, який виконаний аналогічно дворухливому виконавчому механізму обертально-поступального переміщення механічної руки, виконавчий механізм обертальнопоступального переміщення механічної руки і слідкуючий механізм зв'язані між собою трансмісійним валом і гнучкою ланкою, при цьому трансмісійний вал за допомогою зубчатих передач сполучає вали для зміни вильоту штоків, а гнучка ланка через шківи сполучає цапфи, що здійснюють поворот механічних рук щодо штанги, яка оснащена задавальним приводом, який здійснює задавальний рух, тобто поворот механічної руки, слідкуючим приводом, який змінює довжину (виліт) механічної руки залежно від кута повороту, і осцилюючим приводом, UA 105279 C2 (12) UA 105279 C2 який здійснює гармонійні коливання механічної руки; на тильній стороні штанги за слідкуючим механізмом встановлений проміжний вал з двома вихідними ділянками, який за допомогою гнучкої ланки приєднаний до цапфи слідкуючого механізму, при цьому до однієї з вихідних ділянок проміжного вала приєднаний через керовану муфту задавальний привід, а до іншої вихідної ділянки приєднаний за допомогою керованої муфти осцилюючий привід, вихідним передавальним механізмом якого є кривошипно-латунний механізм з повзуном, що коливається; слідкуючий привід приєднаний до виконавчого механізму обертальнопоступального переміщення механічної руки через вал для зміни вильоту механічної руки слідкуючого механізму за допомогою зубчатих передач. Досягається підвищення надійності і довговічності маніпулятора дробоструменевого очищення завдяки простим і ефективним технічним вирішенням конструктивного виконання механічної руки і виконавчого механізму, збільшення продуктивності дробоструменевого очищення за рахунок зменшення штучного часу на обробку, підвищити якість обробки за рахунок більш рівномірного очищення і можливості регулювати технологічний час. UA 105279 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області хімічного машинобудування, а саме до пристроїв для очищення знежирених порожнин суцільнозварних корпусів хімічних апаратів, виконаних у вигляді циліндрової обичайки з привареними еліптичними днищами, одне з яких має центральний люк, від окалини, іржі, пригару, зварювального флюсу, старого захисного покриття і тому подібне. Відомі маніпулятори для дробоструменевої обробки внутрішніх поверхонь порожнистих виробів типу тіл обертання, якими є корпуси хімічних апаратів, що містять горизонтальну штангу, закріплену на стійці, яка змонтована на самохідному візку. Штанга несе поворотну дволанкову механічну руку, пов'язану з приводом. Рука встановлена з можливістю ротації на стійці і кінематичним чином пов'язана з приводом, а в кінематичних ланцюгах повороту механічної руки і ротації штанги встановлені сполучні муфти [Авторское свидетельство СССР № 942982. Манипулятор…. / Л.Н. Кошельникова, В.В. Серик, А.Н. Чернявский, В.И. Деркач // заявка № 2998131 с приоритетом от 01.09.1980. - Публ.: Бюл. № 26. - МКИ B25J 11/00/. - 1982.]. Обробка поверхні еліптичних днищ за допомогою такого маніпулятора здійснюється шляхом складання двох обертальних рухів відомої і веденої ланок механічної руки при нерухомому візку і штанзі, що обертається. Обробка поверхні циліндрової обичайки відбувається при нерухомій відносно штанги механічній руці шляхом поєднання обертального руху штанги і поступального руху самохідного візка маніпулятора. Проте, додання горизонтальній штанзі з механічною рукою обертального руху привело до ускладнення конструкції маніпулятора, зокрема приводу повороту механічної руки, і виявилося технологічно маловиправданим конструктивним рішенням з наступних причин. Відпрацьований дріб, що рикошетує при очищенні, збирається в нижній частині нерухомого оброблюваного виробу, що істотно знижує ефективність очищення внутрішньої поверхні циліндрової обичайки, оскільки відпрацьований дріб закриває частину поверхні від дробеструменевого сопла (факела), що обертається. До того ж, обертання штанги із соплом утрудняє надійну подачу через гумовотканинні рукави легкоабразивної суміші від нерухомого сопла до інструменту, що обертається. Маніпулятори зазвичай передбачають для обробки корпусів хімічних апаратів різного діаметра, а це вимагає виконання телескопічних ланок механічної руки, що за наявності механічної передачі на провідній ланці також веде до ускладнення конструкції маніпулятора, а отже і до пониження його надійності. Через перераховані недоліки подібні автоматичні маніпулятори не отримали широкого промислового застосування. Перспективнішим є технічне рішення [Авторское свидетельство СССР № 1077782. Манипулятор…. / А.Н. Чернявский, В.В. Серик, В.И. Деркач, В.Ф. Листопад, Г.М. Подгорбунский, Н.А. Кочетов // заявка № 3519009 с приоритетом от 08.11.1983. - Публ.: Бюл. № 26. - МКИ B25J 11/00/. - 1984.], яке узяте нами за прототип. Згідно з цим рішенням маніпулятор для дробеструменевого очищення порожнин корпусів хімічних апаратів містить самохідний візок, на який встановлена стійка, що несе горизонтальну штангу з одноланковою механічною рукою і приводи повороту руки і обертання штанги. Маніпулятор забезпечений визначником програми і диференціальним механізмом, виконаним у вигляді гвинтової пари, гвинт якої кінетично пов'язаний з одним з приводів, а гайка через водило диференціального механізму з іншим, причому водило диференціального механізму сполучено з гвинтом за допомогою додатково введеної керованої муфти, а також із визначником програми. Перевагою такого маніпулятора є одноланкова механічна рука, яку необхідно замінювати або вручну змінювати її довжину при переході на обробку корпусу хімічного апарату іншого діаметру. Слід також відзначити, що відтворення одноланковою механічною рукою кривих другого порядку, якими є твірні еліптичних днищ, здійснюється в такому маніпуляторі шляхом складання двох рухів: поворотного руху руки щодо штанги і поступальної ходи самохідного візка щодо оброблюваного виробу. При великій масі, тобто інертності, самохідного візка з маніпулятором складання описаних рухів стає ускладненим, що істотно знижує ефективність застосування в приводі маніпулятора диференціального механізму. Таким чином, прототип успадкував недоліки аналога і став складнішим, тобто менш надійним, не спростивши при цьому переналадку одноланкової механічної руки, що є дуже важливим для дрібносерійного виробництва хімічних апаратів, що характерно для заводів хімічного машинобудування. Тому і такі автоматичні маніпулятори також не отримали достатньо широкого промислового застосування. В основу запропонованого винаходу поставлено задачу створити такий маніпулятор дробеструменевого очищення порожнин корпусів хімічних апаратів, який дозволяє: - технологічно правильно здійснювати дробоструменеве очищення; 1 UA 105279 C2 5 10 15 20 25 30 35 40 45 50 55 60 - скоротити до мінімуму час на переналадку механічної руки при переході на обробку виробу іншого типорозміру; - істотно спростити конструкцію механічної руки; - підвищити надійність подачі легко-абразивної суміші від дробоструменевого апарата до дробоструменевого сопла; - використовувати відпрацьований дріб як додатковий засіб для очищення поверхні; - спростити управління, а отже, і конструкцію маніпулятора; - підвищити надійність маніпулятора; - зменшити експлуатаційні витрати на обробку. Поставлене завдання вирішене таким чином: - механічна рука виконана у вигляді штока з нарізаною зубчатою рейкою, який утворює зі штангою дворухливу кінематичну пару обертально-поступального пересування і є вихідною ланкою дворухливого виконавчого механізму обертально-поступального переміщення механічної руки; - дворухливий виконавчий механізм обертально-поступального переміщення механічної руки виконаний у вигляді фланцевої цапфи, яка своєю зовнішньою поверхнею утворює обертальну пару зі штангою і має два наскрізні отвори, осі яких перехрещені під прямим кутом, центральне по осі і тангенціальне у фланці, через яке пропущений шток, а через центральний отвір проходить вал для зміни вильоту штока з закріпленою на консолі шестірнею, що входить в зачеплення із зубчатою рейкою, нарізаною на штоку; - на тильній стороні горизонтальної штанги встановлений слідкуючий механізм, який виконаний аналогічно дворухливому виконавчому механізму обертально-поступального переміщення механічної руки; - виконавчий механізм обертально-поступального переміщення механічної руки і слідкуючий механізм зв'язані між собою трансмісійним валом і гнучкою ланкою, при цьому трансмісійний вал за допомогою зубчатих передач сполучає вали для зміни вильоту штоків, а гнучка ланка через шківи сполучає цапфи, що здійснюють поворот механічних рук щодо штанги; - штанга маніпулятора оснащена задавальним приводом, який здійснює задавальний рух, тобто поворот механічної руки, і слідкуючим приводом, який змінює виліт (довжину) механічної руки залежно від кута повороту, а також осцилюючим приводом, який здійснює гармонійні коливання механічної руки; - на тильній стороні штанги за слідкуючим механізмом встановлений проміжний вал з двома вихідними ділянками, який за допомогою гнучкої ланки приєднаний до цапфи механізму для стеження, при цьому до однієї з вихідних ділянок проміжного вала приєднаний через керовану муфту задавальний привід, а до іншої вихідної ділянки приєднаний за допомогою керованої муфти осцилюючий привід, вихідним передавальним механізмом якого є кривошипно-латунний механізм з повзуном, що коливається; - слідкуючий привід приєднаний до дворухливого виконавчого механізму обертальнопоступального переміщення механічної руки через вал для зміни вильоту механічної руки механізму для стеження за допомогою зубчатих передач. Викладена суть пропонованого винаходу пояснюється схематичними кресленнями, де на: Фіг. 1 зображена схема маніпулятора дробоструменевого очищення; Фіг. 2 зображена схема пересування механічної руки маніпулятора дробоструменевого очищення при дробоструменевому очищенні внутрішньої поверхні порожнини корпусу хімічного апарату; Фіг. 3 зображена кінематична схема механічної руки маніпулятора. Маніпулятор дробоструменевого очищення складається (Фіг. 1) з вертикальної стійки 1, на яку одягнена обойма 2, утворююча із стійкою кінематичну пару поступального руху Н12. З обоймою за допомогою кінематичної пари поступального руху Н23 зв'язана горизонтальна штанга, що несе одноланкову механічну руку 4, виконану у вигляді штока. Шток проходить через тангенціальний отвір цапфи, тобто утворює з цапфою кінематичну пару поступального руху Н54, яка за допомогою шарніра 0 сполучена з штангою 3. Таким чином, цапфа 5 дозволяє штоку повертатися щодо штанги і рухатися поступально щодо цапфи. Оброблюваний виріб 6 є суцільнозварним корпусом хімічного апарата, який виготовлений з циліндрової обичайки 7 діаметром d і приварених до неї еліптичних днищ: глухого 8 і відкритого 9, який має центральний люк діаметром d1. Працює маніпулятор дробеструменевого очищення таким чином. Початковий стан - корпус хімічного апарата знаходиться в горизонтальному положенні поза маніпулятором. Шляхом пересування обойми 2 по стійці 1 суміщають подовжню вісь горизонтальної штанги 3 з центральною віссю оброблюваного виробу 6. Механічну руку 4 розгортають уздовж осі штанги 3 2 UA 105279 C2 5 10 15 20 25 30 35 40 45 50 55 60 і обертають у бік оброблюваного виробу 6. Шляхом поступального пересування вліво в обоймі 2 заводять горизонтальну штангу 3 в порожнину оброблюваного корпусу хімічного апарата 6 через центральний люк діаметром d1 відкритого днища 9 до положення, коли шарнір 0 цапфи 5 співпаде з точкою e на осі симетрії циліндрової обичайки 7. Точка e знаходиться на відстані b від великої осі еліпса, який утворює глухе днище 8. Руку маніпулятора дробоструменевого очищення, яка несе дробоструменеве сопло, виставляють так, щоб від сопла до оброблюваної поверхні була оптимальна відстань r. Оброблюваному виробу 6 спричиняють обертальний рух з круговою швидкістю ω, подають легкоабразивну суміш від дробоструменевого апарата до дробоструменевого сопла і починають повертати за годинниковою стрілкою цапфу 5 з механічною рукою, виконаною у вигляді штока 4. Таким чином, механічній руці 4 додають заданий обертальний рух. Для якісного очищення оброблюваної поверхні механічна рука, що несе дробоструминне сопло, обходить твірну криву корпусу 6 по еквідистантній кривій в горизонтальній площині. Таке завдання вирішується тим, що руці 4, окрім обертального руху при обробці днищ разом з цапфою 5 навколо шарніра 0, подається поступальний слідкуючий рух уздовж тангенціального отвору в цапфі 5 залежно від кута повороту цапфи. При очищенні глухого днища 8 і частини циліндрової обичайки 7 завдовжки b горизонтальна штанга залишається нерухомою. Коли механічна рука 4 обернеться на 90 за годинниковою стрілкою і стане по нормалі до внутрішньої поверхні обичайки 7, поворот механічної руки припиняють і починають поступально переміщати штангу 3 праворуч. Оскільки при цьому механічна рука 4 залишається нерухомою відносно штанги 3, то дробоструменеве сопло переміщається по прямій лінії на оптимальній відстані r від оброблюваної поверхні циліндрової обичайки 7. Рух горизонтальної штанги 3 припиняють, коли шарнір 0 цапфи 5 співпадає з точкою f на осі симетрії виробу. Точка f знаходиться на відстані b від великої осі еліпса, який утворює відкрите днище 9. Таким чином, після зупинки штанги 3 починають повертати цапфу 5 разом з механічною рукою 4 навколо шарніра 0 за годинниковою стрілкою. Залежно від кута повороту цапфи 5 штоку 4 надають поступальне слідкуюче переміщення уздовж тангенціального отвору в цапфі 5, щоб дробоструменеве сопло завжди знаходилося на оптимальній відстані r до оброблюваної поверхні. В результаті такого руху сопло при повороті механічної руки 4 описує еквідистантну криву на відстані r щодо частини циліндрової обичайки завдовжки в і еліпса, який утворює відкрите днище 9. Поєднання обертального руху оброблюваного виробу 6 і поступального переміщення дробоструменевого сопла разом з механічною рукою 4 по еквідистантній кривій з певними швидкостями дозволяє послідовно обробити (очистити) всю внутрішню поверхню порожнини корпусу хімічного апарату 6, починаючи від глухого днища 8, продовжуючи на обичайці 7 і закінчуючи люком діаметром d1, відкритого днища 9. Після досягнення дробоструменевим соплом люка відкритого днища подача легкоабразивної суміші до сопла припиняється, а механічній руці 4 повідомляють реверсивний обертальний рух проти годинникової стрілки. Після поєднання осі штока 4 з віссю горизонтальної штанги 3 реверсивне обертання механічної руки 4 припиняють, зупиняють обертання виробу 6 і шляхом поступального переміщення управо горизонтальної штанги в обоймі 2 виводять механічну руку 4 з порожнини обробленого корпусу 6. Очищення внутрішньої поверхні корпусу 6 завершено і маніпулятор приведений в початковий стан. На Фіг. 2 представлена схема пересування в горизонтальній площині механічної руки маніпулятора дробоструменевого очищення, яка оснащена дробоструменевим соплом, щодо твірної кривої порожнини суцільнозварного корпусу хімічного апарата. Як видно із цієї схеми, в початковому положенні вісь повороту механічної руки 4 знаходиться в точці e на осі симетрії оброблюваного виробу на відстані b від великої осі еліпса, який утворює глухе днище 8. Механічна рука займає положення е-а. Повертаючись навколо осі e з точки а в точку б, механічна рука 4 здійснює задавальний обертальний рух, по черзі займаючи положення 1, 2, 3, 4, 5, 6 і при цьому подовжується на відрізки 1-1', 2-2', 3-3', 4-4', 5-5', здійснюючи слідкуюче поступальне переміщення, яке забезпечує дробоструменевому соплу пересування по еквідистантній кривій, розташованій на оптимальній відстані r від еліптичної твірній глухого днища 8. Коли механічна рука 4 досягає нормального положення щодо циліндрової обичайки 7, тобто точки б, поворот механічної руки щодо штанги припиняється. Механічна рука займе положення е-б. Починається поступальне переміщення штанги з нерухомою механічною рукою. Дробоструменеве сопло при цьому переміщається по прямій лінії на відносній відстані r від оброблюваної поверхні циліндрової обичайки 7 з точки б в точку в. 3 UA 105279 C2 5 10 15 20 25 30 35 40 45 50 55 60 Коли в результаті поступального переміщення штанги вісь повороту механічної руки 4 досягає точки f на осі симетрії виробу, штанга зупиняється. Механічна рука 4 при цьому займе положення f-в і починає повертатися за годинниковою стрілкою з точки в в точку г, тобто здійснювати задавальний обертальний рух, послідовно займаючи положення 8, 9, 10, 11, 12. Механічна рука при повороті подовжується на відрізки 8-8', 9-9', 10-10',11-11', 12-12', здійснюючи слідкуюче поступальне переміщення механічної руки, яке забезпечує дробоструменевому соплу переміщення по еквідистантній кривій до еліптичної твірної відкритого днища на оптимальній відстані r від оброблюваної поверхні. Пристрій і принцип дії механічної руки пояснюється кінематичною схемою, приведеною на Фіг. 3. Механічна рука виконана у вигляді штока 10 з нарізаною зубчатою рейкою, який пропущений через тангенціальний отвір у фланці 11, що належить цапфі 12. Цапфа і фланець є єдиною цілісною деталлю - фланцевою цапфою, яка встановлена на опорах 13 в тілі штанги. Через центральний отвір цапфи проходить вал 14, змонтований на підшипниках 15. На вихідній ділянці вала 14 посаджена шестірня 16, яка входить в зачеплення із зубчатою рейкою, нарізаною на штоку 10. Вхідна ділянка валу через конічну зубчату пару 17-18 сполучена з трансмісійним валом 19. На цапфі 12 між опорами 13 посаджений шків 20. Таке поєднання цапфи 12 і валу 14 утворює дворухливий виконавчий механізм, який за допомогою двох незалежних приводів здатний надавати штоку 10 задавальний обертальний рух навколо осі I і слідкуючий поступальний рух уздовж потенційного отвору у фланці 11. На тильній стороні штанги по осі II змонтований слідкуючий механізм, який конструктивно аналогічний дворухливому виконавчому механізму, що здійснює рух штока 10. Слідкуючий механізм призначений для візуального спостереження за положенням механічної руки, тобто штока 10, в порожнині суцільнозварного корпусу хімічного апарату і для формування команд, що управляють, на вузлових точках оброблюваного виробу для приводів механічної руки за допомогою шляхових вимикачів. Він складається з механічної руки-штока 21 з нарізаною зубчатою рейкою, який пропущений через тангенціальний отвір у фланці 22, що належить цапфі 23, змонтованою на опорах 24. Через центральний отвір цапфи 23 проходить вал 25, встановлений на підшипниках 26. На вихідній ділянці вала 26 посаджена шестерня 27, яка зачіпляється із зубчатою рейкою, нарізаною на штоку 21. Вхідна ділянка валу 26 через конічну зубчату пару 28-29 сполучений з трансмісійним валом 19 і далі за допомогою конічної шестерні 30 з вихідним валом 31 слідкуючого приводу 32, який має кроковий двигун. На цапфу 23 між опорами 24 посаджено два шківи 33 і 34. Шків 33 служить для з'єднання за допомогою гнучкої ланки 35 зі шківом 20, закріпленим на цапфі 12. За допомогою другого шківа 34 цапфа 23 за допомогою гнучкої ланки 36 сполучена з шківом 37, посадженим на проміжний вал 38, який встановлений на осі III. Проміжний вал 38 змонтований на опорах 39 і має два вихідних ділянки. До верхньої вихідної ділянки валу 38 через керовану муфту 40 приєднаний задавальний привід 41 з кроковим двигуном, а до нижньої вихідної ділянки валу 38 через керовану муфту 42 приєднаний за допомогою кривошипно-шатунового механізму осцилюючий привід 43. Кривошипно-шатуновий механізм має кривошип 44, який за допомогою обертальної пари 45 приєднаний до шатуна 46. Шатун входить в отвір повзуна 47, що коливається, який прикріплений до вала 48, встановленому на опорі 49. Таким чином, механічна рука 10 має три незалежні приводи для переміщення руки щодо штанги: - задавальний привід 41, що здійснює за допомогою цапфи 12 обертальний рух, а саме поворот механічної руки навколо осі І при обробці поверхні еліптичних днищ; - слідкуючий привід 32, що здійснює поступальне переміщення механічної руки щодо цапфи 12 при обробці поверхні еліптичних днищ; - осцилюючий привід 43, який в процесі обробки поверхні еліптичних днищ і циліндрової обичайки при зупиненому задавальномуу приводі 41 здійснює гармонійні коливання механічної руки. При дробоструменевому очищенні поверхні еліптичних днищ приводи працюють послідовно. Першим починає працювати задавальний привід, який повертає механічну руку навколо осі І на певний кут і зупиняється. Потім слідкуючий привід залежно від кута повороту механічної руки змінює виліт руки, розміщуючи дробоструменеве сопло на еквідистантній кривій до еліптичної твірної днища, і зупиняється. Починає працювати осцилюючий привід, який повідомляє механічній руці гармонійні коливання. Час роботи t осцилюючого приводу прямопропорційний до площі оброблюваної поверхні і обернено пропорційний до продуктивності дробоструменевого сопла і визначається по формулі: 4 UA 105279 C2 5 10 15 20 25 30 35 40 45 50 55 t=πdbф/Q, де d - поточний діаметр, на якому розміщується дробоструменеве сопло при повороті механічної руки на певний кут; bф - ширина відбитку дробоструменевого факела на оброблюваній поверхні; Q - продуктивність дробоструменевого сопла при видаленні шару металу певної товщини δ з оброблюваної поверхні. При дробоструменевому очищенні поверхні циліндрової обичайки працює тільки один осцилюючий привід, що повідомляє механічній руці гармонійні коливання. Задавальний привід 41 здійснює поворот цапфи 12 з механічною рукою 10 навколо осі І по наступному кінематичному ланцюжку: керована муфта 40 - проміжний вал 38, встановлений на опорах 39, - шків 37 - гнучка ланка 36 - шківи 34, 33, посаджені на цапфу 23, яка встановлена на опорах 24, - гнучка ланка 35 - шків 20 - цапфа 12, розміщена в опорах 13, - фланець 11. Слідкуючий привід 32 здійснює поступальне переміщення механічної руки 10 уздовж тангенціального отвору у фланці 11 по наступному кінематичному ланцюжку: вал 31 - конічні зубчаті колеса 30, 29, 28 - трансмісійний вал 19 - конічні зубчаті колеса 18, 17 - вал 14, встановлений на підшипниках 15, - шестірня 16, що входить в зачеплення із зубчатою рейкою, нарізаною на штоку 10. Осцилюючий привід 43 здійснює гармонійні коливання механічної руки 10 в горизонтальній площині в процесі дробострумневого очищення по наступному кінематичному ланцюжку: кривошип 44 - обертальна пара 45 - шатун 46 - повзун 47 - вал 48, встановлений на опорі 49, керована муфта 42 - вал 38 - шків 37 - гнучка ланка 36 - шківи 33, 34 - гнучка ланка 35 - шків 20 цапфа 12 - фланець 11, через тангенціальний отвір якого пропущена механічна рука. Слідкуючий механізм повторює всі рухи дворухливого виконавчого механізму, складеного з цапфи 12 і валу 14. Він паралельно приєднаний до приводів задавального, слідкуючого і осцилюючого рухів. Цапфа 23, встановлена на опорах 24, отримує рух від шківа 34 (задавальний поворот або що здійснює коливання механічної руки) і передає його на фланець 22, в тангенціальний отвір якого вставлена механічна рука - шток 21. Слідкуючий рух шток 21 отримує від приводу 32 через вал 31 і далі за допомогою конічної зубчатої пари 31, 30 на вал 25, встановлений на опорах 26. Далі шестерня 27, закріплена на вихідній ділянці валу 25 і що входить в зачеплення із зубчатою рейкою, нарізаною на штоку 21, здійснює поступальне переміщення механічної руки слідкуючого механізму по тангенціальному отвору у фланці 22. Запропоноване технічне рішення на Маніпулятор дробоструменевого очищення порожнин суцільнозварних корпусів хімічних апаратів має техніко-економічні переваги перед прототипом, які виражаються в наступному: - маніпулятор має просту конструкцію механічної руки, виконавчого і передавального механізмів, що забезпечує високу надійність маніпулятора дробоструменевого очищення при роботі в екстремальних умовах дробоструменевого очищення, які характеризується інтенсивною абразивною дією дробу, що рикошетить, і підвищеною запиленістю навколишнього середовища; - досить просто і надійно обходити механічною рукою оброблювану поверхню, утворену кривою другого порядку, по еквідистантній кривій, підтримуючи оптимальну відстань від дробоструменевого сопла до оброблюваної поверхні, за допомогою дворухомого виконавчого механізму обертально-поступального переміщення механічної руки; - здійснення гармонійних коливань механічної руки за допомогою осцилюючого приводу дозволяє підвищити рівномірність дробоструменевого очищення оброблюваної поверхні; - легкість переналадки механічної руки при переході на обробку корпусу хімічного апарату іншого діаметру; - технологічна ефективність - відпрацьований дріб, що рикошетить, не заважає дробоструменевому соплу, яке переміщається в горизонтальній площині, очищати оброблювану поверхню, оскільки штанга не обертається; - наявність слідкуючого механізму, який може бути виготовлений в зменшеному масштабі в порівнянні з виконавчим механізмом, дає можливість візуального спостереження за положенням робочого органу, тобто дробоструменевого сопла в порожнині оброблюваного виробу; - простота шляхового управління за допомогою слідкуючого механізму; - зручність програмування у зв'язку з наявністю слідкуючого механізму, що дозволяє фіксувати вузлові точки при обробці внутрішньої поверхні порожнини оброблюваного виробу; - зменшення підготовчо-завершального часу на переналадку, тобто зменшення штучного часу; 5 UA 105279 C2 5 10 15 20 25 30 35 40 45 50 55 - відсутність громіздкого диференціального механізму для ліквідації неузгодження положення механічної руки щодо оброблюваної поверхні; - надійна подача легкоабразивної суміші від дробоструменевого апарата до дробоструменевого сопла, оскільки дробоструменеве сопло не обертається, а тому падаючий гумовотканинний рукав не потребує додаткових муфт. Перераховані техніко-економічні переваги маніпулятора дробоструменевого очищення перед прототипом дозволяють: збільшити продуктивність дробоструменевого очищення за рахунок зменшення штучного часу на обробку; підвищити якість обробки за рахунок більш рівномірного очищення і можливості регулювати технологічний час; підвищити надійність і довговічність маніпулятора дробоструменевого очищення завдяки простим і ефективним технічним вирішенням конструктивного виконання механічної руки і виконавчого механізму. Джерела інформації: 1. Авторское. свидетельство СССР № 942982. Манипулятор…. / Л.Н. Кошельникова, В.В. Серик, А.Н. Чернявский, В.И. Деркач // заявка № 2998131 с приоритетом от 01.09.1980. - Публ.: Бюл. № 26. - МКИ B25J 11/00/. - 1982. 2. Авторское. свидетельство СССР № 1077782. Манипулятор…. / А.Н. Чернявский, В.В. Серик, В.И. Деркач, В.Ф. Листопад, Г.М. Подгорбунский, Н.А. Кочетов // заявка № 3519009 с приоритетом от 08.11.1983. - Публ.: Бюл. № 26. - МКИ B25J 11/00/. - 1984. ФОРМУЛА ВИНАХОДУ 1. Маніпулятор дробоструменевого очищення знежирених порожнин суцільнозварних корпусів хімічних апаратів, який містить вертикальну стійку з надітою обоймою, яка утворює поступальну пару з горизонтальною штангою, що несе механічну руку, який відрізняється тим, що механічна рука виконана у вигляді штока з нарізаною зубчатою рейкою, утворюючи зі штангою дворухливу кінематичну пару обертально-поступального пересування, і є вихідною ланкою дворухливого виконавчого механізму обертально-поступального переміщення механічної руки. 2. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що дворухливий виконавчий механізм обертально-поступального переміщення механічної руки виконаний у вигляді фланцевої цапфи, яка встановлена в штанзі, своєю зовнішньою поверхнею утворює обертальну пару з нею і має два крізні отвори, осі яких перехрещені під прямим кутом, центральний по осі і тангенціальний у фланці, через який пропущений шток, а через центральний отвір проходить вал, на вихідній ділянці якого закріплена шестірня, що зачіпляється із зубчатою рейкою, нарізаною на штоку. 3. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що на тильній стороні горизонтальної штанги встановлений слідкуючий механізм, який виконаний аналогічно дворухливому виконавчому механізму обертально-поступального переміщення механічної руки. 4. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що виконавчий механізм обертально-поступального переміщення механічної руки і слідкуючий механізм зв'язані між собою трансмісійним валом і гнучкою ланкою, при цьому трансмісійний вал за допомогою зубчатих передач сполучає вали для зміни вильоту штоків, а гнучка ланка через шківи сполучає цапфи, що здійснюють поворот механічних рук щодо штанги. 5. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що штанга маніпулятора оснащена задавальним приводом для здійснення задавального руху, тобто повороту механічної руки, слідкуючим приводом для змінювання довжини (вильоту) механічної руки залежно від кута повороту, і осцилюючим приводом для здійснення гармонійних коливань механічної руки. 6. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що на тильній стороні штанги за слідкуючим механізмом встановлений проміжний вал з двома вихідними ділянками, який за допомогою гнучкої ланки приєднаний до цапфи слідкуючого механізму, при цьому до однієї з вихідних ділянок проміжного вала приєднаний через керовану муфту задавальний привід, а до іншої вихідної ділянки приєднаний за допомогою керованої муфти осцилюючий привід, вихідним передавальним механізмом якого є кривошипно-шатунний механізм з повзуном, що коливається. 7. Маніпулятор дробоструменевого очищення за п. 1, який відрізняється тим, що слідкуючий привід приєднаний до виконавчого механізму обертально-поступального переміщення механічної руки через вал для зміни вильоту механічної руки слідкуючого механізму за допомогою зубчатих передач. 6 UA 105279 C2 7 UA 105279 C2 Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Автори англійськоюHoryk Oleksii Volodymyrovych
Автори російськоюГорик Алексей Владимирович
МПК / Мітки
МПК: B25J 11/00
Мітки: очищення, маніпулятор, дробоструменевого
Код посилання
<a href="https://ua.patents.su/10-105279-manipulyator-drobostrumenevogo-ochishhennya.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор дробоструменевого очищення</a>
Автоматичний маніпулятор для дробеструменевого очищення
Номер патенту: 78574
Опубліковано: 25.03.2013
Автори: Горик Олексій Володимирович, Ландар Анатолій Антонович, Чернявський Анатолій Миколайович, Шулянський Григорій Анатолійович
МПК: B25J 11/00
Мітки: дробеструменевого, автоматичний, маніпулятор, очищення
Формула / Реферат:
1. Автоматичний маніпулятор для дробеструменевого очищення знежирених порожнин суцільнозварних корпусів хімічних апаратів, що містить вертикальну стійку з надітою обоймою, яка утворює поступальну пару з горизонтальною штангою, що несе механічну руку, який відрізняється тим, що механічна рука виконана у вигляді штока з нарізаною зубчатою рейкою, який утворює з штангою дворухливу кінематичну пару обертально-поступального пересування і є...
Маніпулятор для зміни заглибного стакана на машині безперервного лиття заготівок
Номер патенту: 52122
Опубліковано: 10.08.2010
Автори: Снежинський Олексій Ігоревич, Казаков Олександр Васильович, Пакін Володимир Арсентіович, Санжаревський Олег Васильович
МПК: B22D 41/50
Мітки: зміни, заглибного, лиття, безперервного, заготівок, машини, маніпулятор, стакана
Формула / Реферат:
1 .Маніпулятор для зміни заглибного стакана на машині безперервного лиття заготівок, що містить штангу з гільзою для втримання стакана, механізми горизонтального та вертикального переміщення штанги, а також механізм повороту штанги, який відрізняється тим, що механізм повороту штанги виконаний у вигляді шарнірного дволанкового важільного механізму, одна ланка якого шарнірно з'єднана зі штангою, а друга ланка шарнірно з'єднана з механізмом...
Інструментальний маніпулятор
Номер патенту: 43879
Опубліковано: 10.09.2009
Автори: Волошин Олексій Іванович, Маринов Дмитро Всеволодович, Дзержинський Віталій Олександрович, Залевський Костянтин Едуардович, Удовенко Сергій Олександрович
МПК: B21J 13/00
Мітки: маніпулятор, інструментальний
Формула / Реферат:
Інструментальний маніпулятор, що містить станину, стіл, розміщений на спрямівниках станини з можливістю переміщення відносно них, поворотну обойму, опорні ролики, інструментальні штанги з інструментом, зв'язані з повзунами, встановленими на спрямівниках поворотної обойми, гідроциліндр механізму підйому інструменту і механізм обертання поворотної обойми, який відрізняється тим, що поворотна обойма виконана з упорами, розміщеними по колу на...
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Бергер Еміль Григорович, Табацков Вячеслав Петрович, Бергер Євгеній Емильович, Іванов Геннадій Олександрович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Інструментальний маніпулятор
Номер патенту: 69199
Опубліковано: 25.04.2012
Автори: Вальченко Сергій Борисович, Бобров Валентин Григорович, Попов Олександр Олександрович, Залевський Костянтин Едуардович
МПК: B21J 13/00
Мітки: маніпулятор, інструментальний
Формула / Реферат:
1. Інструментальний маніпулятор, що містить станину, рухомо встановлений на напрямні станини стіл, оснащений поворотною обоймою з опорними роликами і інструментальними штангами, оснащеними повзунами, закріпленими на напрямних поворотної обойми, механізм підйому інструменту і кроковий механізм обертання поворотної обойми з упорами, який відрізняється тим, що в інструментальному маніпуляторі додатково встановлений центрувальний пристрій,...
Попередній патент: Спосіб отримання каталітично активних антитіл (абзимів) із сіалідазною активністю
Наступний патент: Спосіб формування ливарних форм та пристрій для формування
Випадковий патент: Спосіб вертикального електрорезонансного зондування