Телеоператор
Номер патенту: 1728
Опубліковано: 15.04.2003
Автори: Пуриш Валентин Захарович, Бойченко Тамара Михайлівна, Корольов Сергій Михайлович, Корольова Галина Валентинівна
Формула / Реферат
Телеоператор, що містить опорний каркас із модульних слідкуючих гідроприводів з мікропроцесорним керуванням у гідроскафандрі, маніпулятори рук і ніг, ранцеву гідростанцію, центральний комп’ютер програмного керування та системи гідростабілізації, супервізорного керування, який відрізняється тим, що його системи керування мають радіаційностійкі мікросхеми, наприклад, арсенід-галієвої технології, багатошарові екрани захисту із композитних матеріалів і борованої гідрорідини, розгалужену систему сенсорів порогової дози опромінення, а також камеру термообробки та дезактивації.
Текст
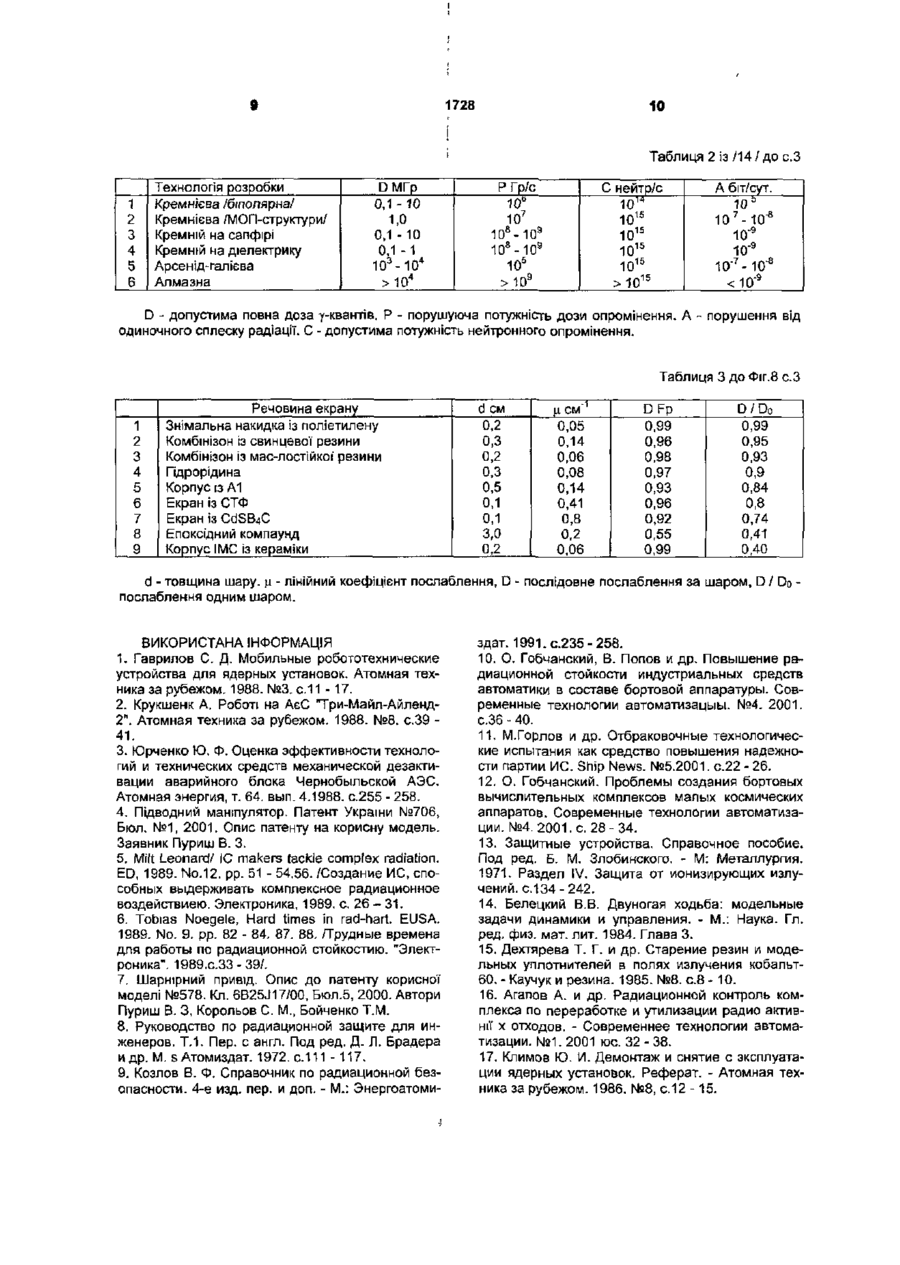
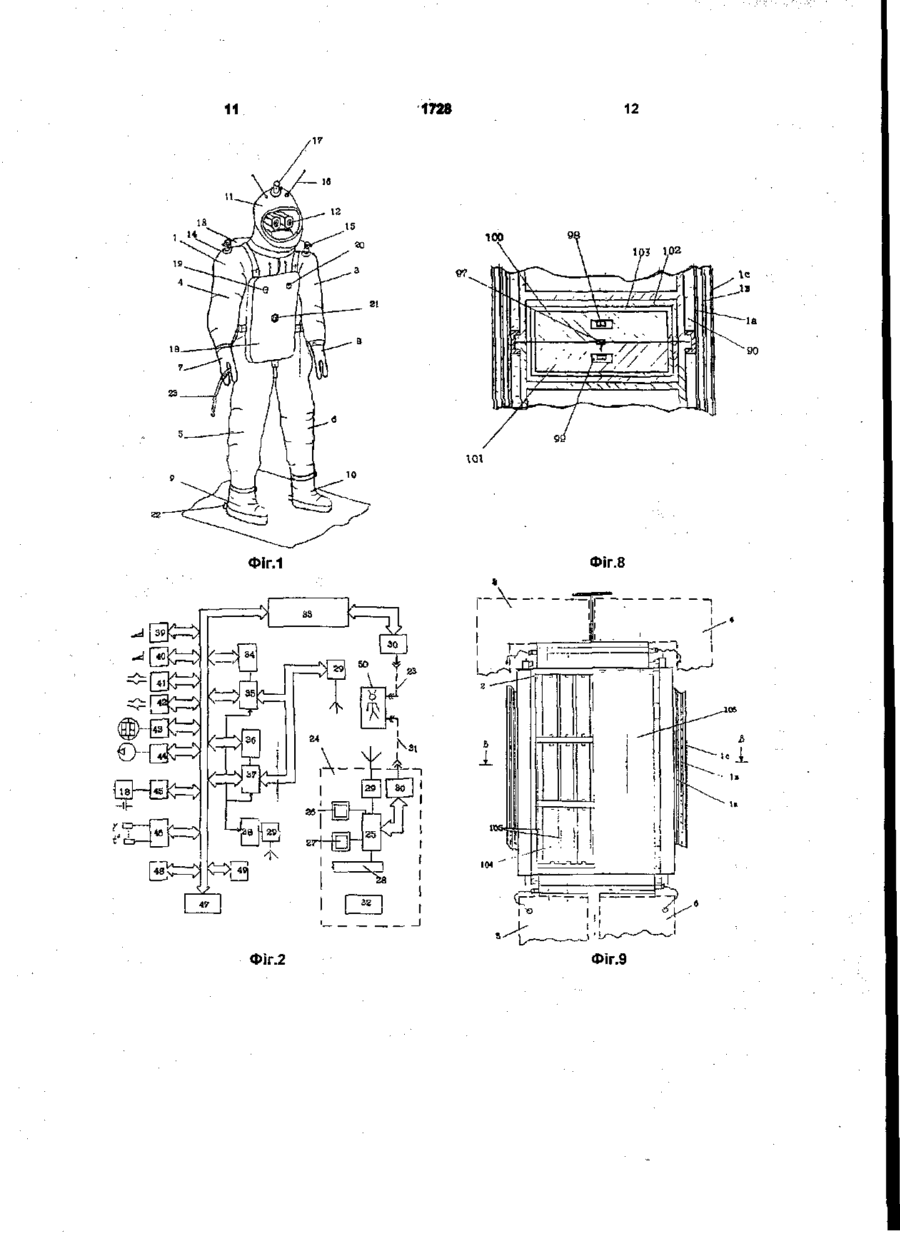
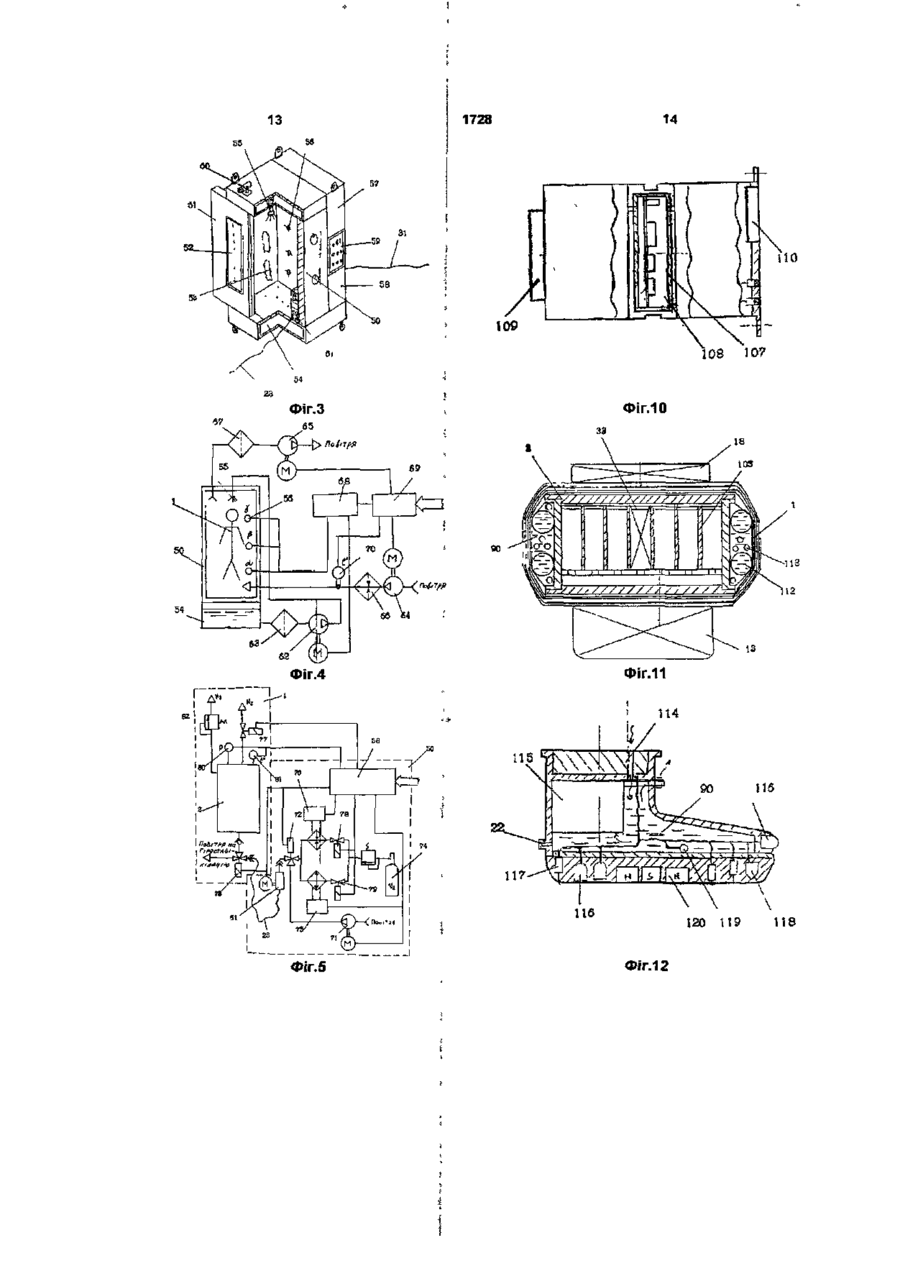
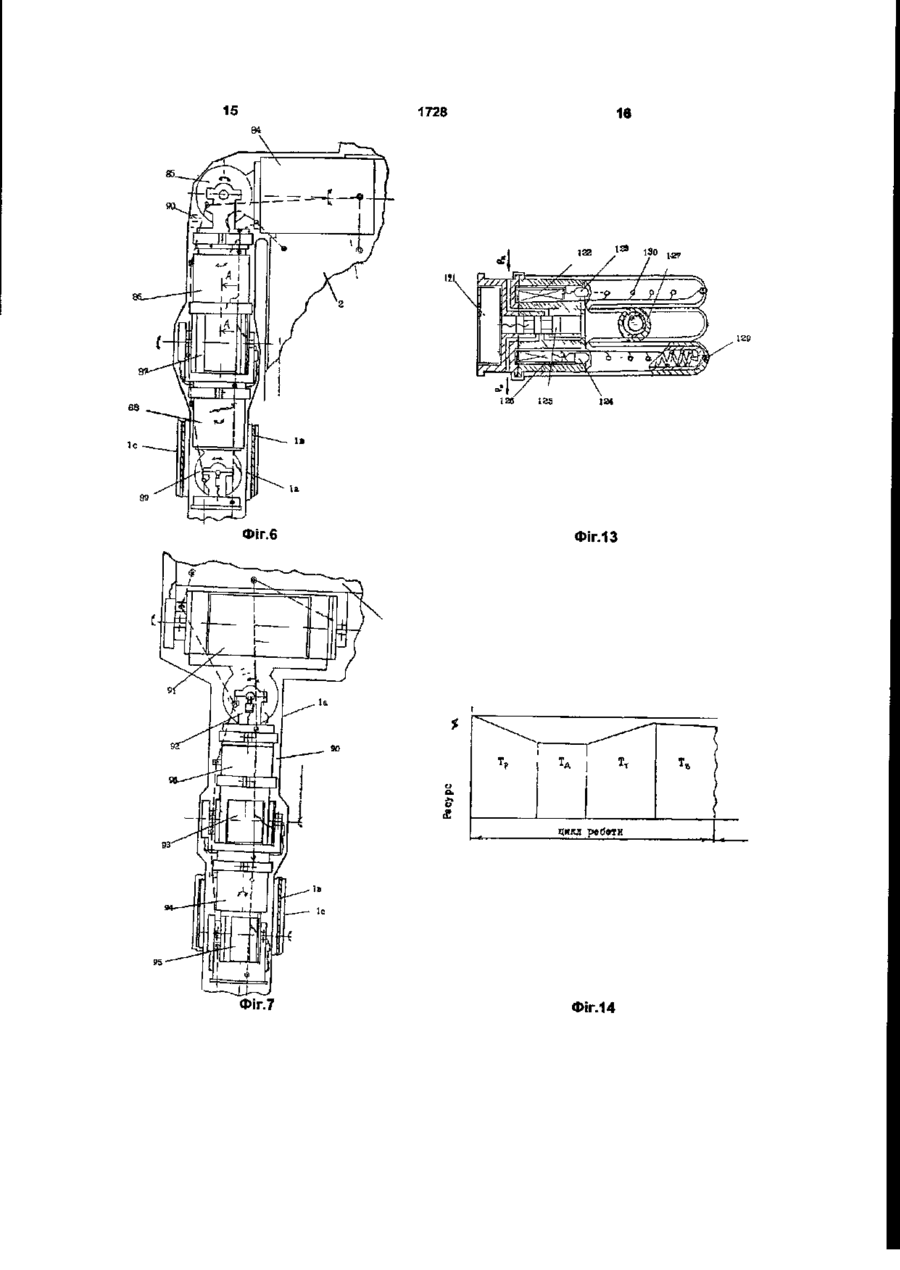
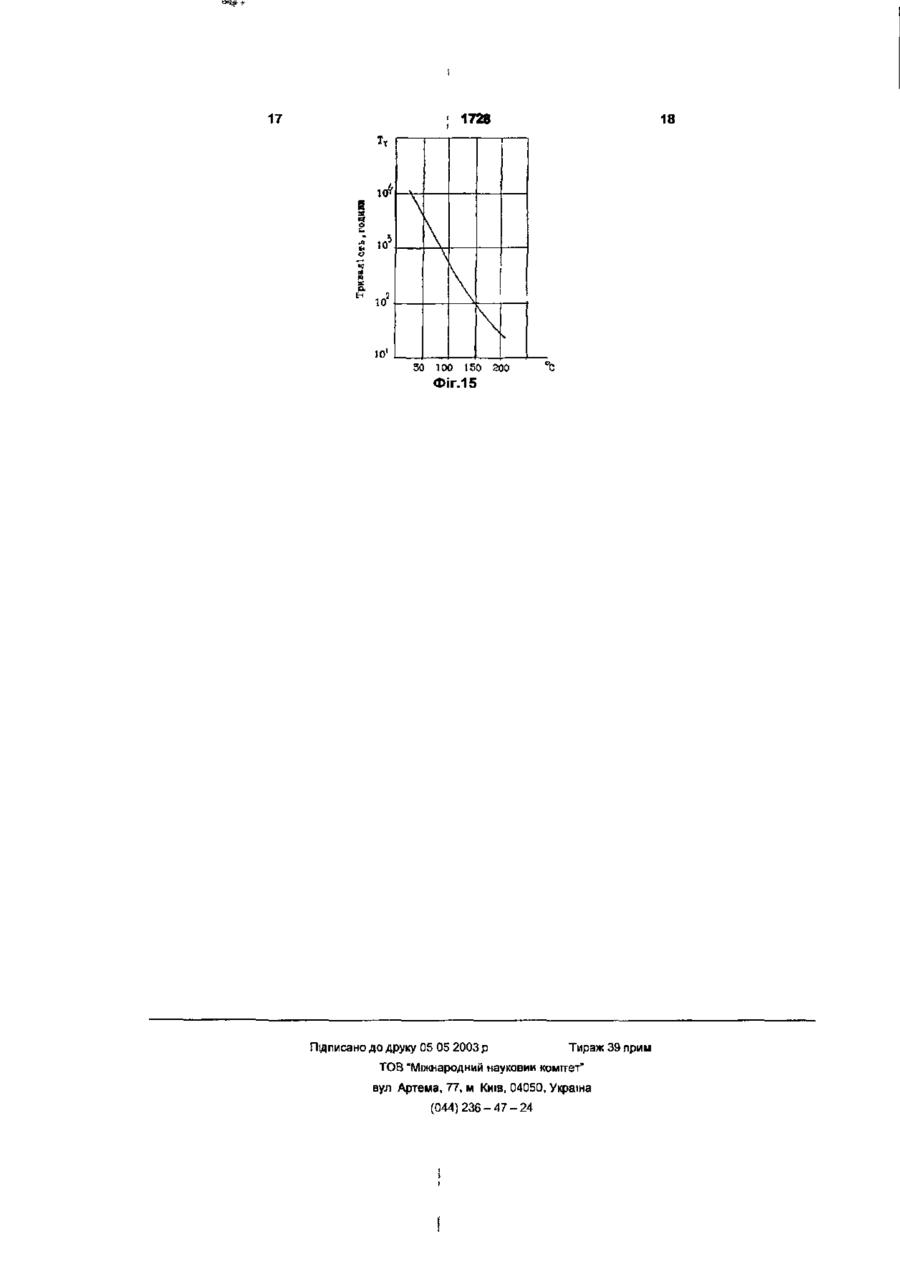
Телеоператор, що містить опорний каркас із модульних слідкуючих гідроприводів з мікропроцесорним керуванням у пдроскафандрі, маніпулятори рук і ніг, ранцеву гідростанцію, центральний комп'ютер програмного керування та системи гідростабілізації, супервізорного керування, який відрізняється тим, що його системи керування мають радіаційностійкі мікросхеми, наприклад, арсен ід-галієвої технології, багатошарові екрани захисту із композитних матеріалів і борованої пдрорщини, розгалужену систему сенсорів порогової дози опромінення, а також камеру термообробки та дезактивації. Корисна модель належить до промислових роботів та маніпуляторів антропоморфного типу, здатна працювати у радіоактивному середовищі тривалий час як на поверхні так і під водою, замінюючи людину без переробки середовища робочого місця Відомі мобільні телеоператори встановлені на колісних, гусинічних та крокуючих шасі здатні працювати у радіоактивному середовищі в умовах атомних електростанцій [1. 2]. Недоліком цих роботів є обмежені маніпуляційні можливості і нездатність повністю замінити людину у складному середовищі обладнання АЕС Відомий також досвід використання телеоператорів під час ліквідації аварії на Чорнобильській АЕС [3]. Виявлені при цьому недоліки теж пов'язані з обмеженням маніпуляційних можливостей а також низькою захищеністю систем керування, від впливу радіації. Найбільш близьким по конструкції до Телеоператора - "Підводний маніпулятор" /Патент України №706/, який приймаємо за прототип [4] Підводний маніпулятор містить опірний каркас із шарнірних слідкуючих гідроприводів з мікропроцесорним керуванням у м'якому пдроскафандрі, крім того його оснащено навішаною портативною пневмогідростанцією, центральним компьютером програмного керування та системами простабілізації і супервізорного керування по кабельному та акустичному каналам. Недоліком Підводного маніпулятора можна вважати обмежену рухомість на поверхні ґрунту та низьку тривалість роботи у радіоактивному середовищі Задача корисної моделі полягає у тому, щоб Підводний маніпулятор перетворити у Телеоператор здатний тривалий час замінити людину при роботі у радіоактивному середовищі. Поставлена задача вирішується таким чином, що згідно з корисною моделлю, всі системи керування мають радіаційне стійкі мікросхеми, наприклад, арсенід галієвої технологи, з багатошаровими екранами Із композитних матеріалів і борованої пдрорідини, розгалужену систему сенсорів порогової дози опромінення, а також камеру термообробки та дезактивації. Американські ТУ MIL-M-38510 встановлюй чотири рівня радіаційної стійкості мікросхем які приведені у Таблиці 1. Радіаційне стійкими по відношенню до повної поглинутої кремнієм дози опромінення вважається такі мікросхеми, котрі продовжують працювати після поглинутої дози ^-опромінення не менше ЮкГр. Мінімальний рівень дози для радіаційне стійких мікросхем дорівнює ЮОГр, Для арсенід галієвих мікросхем випробування показали, про відсутність деградації динамічних і статичних параметрів мікросхем при повних дозах опромінення по 1,0МГр, Сучасні Фірми /AMD. Hariss, National. Ті. Honeywel. IBM. GE, Hughes. Rl Gigabot. Logis Ms. Donnel-Douglas. Tn Quint. Crystallume /серійно 00 CM 1728 випускають радіаційно СТІЙКІ мікросхеми по різним технологіям із яких найбільш стійкі до опромінення із арсенід галія а у майбутньому на основі алмаза Досягнуті гарантовані параметри радіаційної стійкості представлені на Таблиці 2. [6]. Застосування захисних екранів із композитних матеріалів дозволяє послабити у-опромінення від двох до десяти крат, особливо з застосуванням композитів з домішками кадмія, бору , урану, гадоЛІНІЯ. Приклад розрахунків послаблення уопромінення систем керування модульних гідроприводів [7], що утворюють маніпулятори рук /Фіг.6/ та маніпулятори ніг /Фіг.7./ представлено в Таблиці 3 для чого використано розріз /ФІг.8./з модельними розмірами. Розрахунок виконано без врахування альбедо та коефіцієнта накопичення, що для тонких шарів можна припустити [8]. В розрахунках використана відома формула /9.с, 235./ D = Doexp (- цсі), де Do - доза опромінення до екрана,Гр. В - доза опромінення після екрана, Гр, ц - лінійний коефіцієнт послаблення уопромінення, см"1 d - товщина екрана, см. Із формули виведені співвідношення D / Do = ехр (- (id). Всі порожнини внутрішньої конструкції в середині гщроскафандра заповнені гідрорщиною, що має присадки із сполук бору та гадолінія з метою, заторможення та поглинання нейтронів зовнішнього опромінення. У гідрорідині на базі нафтових масел при опромінені можуть утворюватись гази /Нег, Нг і ін /, які будіть стравлюватись через автоматичний клапан у шлемі телеоператора Захист центрального комп'ютера показана на /Фіг.11/ і розрахунки проводились аналогічно Таблиці 3, які дали послаблення опромінення у ЗО раз. Телеоператор може бути у стані "робота" - коли всі системи керування та контролю знаходяться під напругою і опромінюються зовнішньою радіацією, та стані -" відпочинок ",що має два режиму: дезактивація і термообробка, їх взаємне розташування показано на Фіг.14 де тривалість термообробки Т залежить від температури і визначається графіком на Фіг.15, [10]. Ефективності термообробки перевіряються тестами блока діагностики. Значне підвищення надійності роботи мікросхем дають відбраковані випробування мікросхем перед їх застосуванням [11], а також застосування різних профілактичних засобів при експлуатації [12] У камері дезактивації Телеоператор зберігається, транспортується проходить дезактивацію та термообробку. Розгалужена система визначення лорогової поглинутої дози опромінення має сенсори коло всіх важливих функціональних блоків систем керування модульними пдроприводами, блоків керування маніпуляторами рук і ніг, простабілізації, центрального комп'ютера, радюмодемів, блоків інтерфейсів. Тривалість роботи телеоператора визначається формулою /13.с.139/ T=D/P, де, Р - потужність зовнішньої дози опромінення, Гр/с, D - допустима поглинута доза опромінення мікросхем Гр. t - час перебування у радіоактивному середовищі, години Для забезпечення тривалої і надійної роботи Телеоператора у радіаційному середовищі крім екранування радіаційно стійких мікросхем передбачено три канали керування маніпуляторами рук і ніг: основне, резервне, аварійне. На Фіг. 1, представлено загальний вигляд телеоператора, на Фіг.2.-загальна структурна схема керування, на Фіг.З - камера дезактивації, на Фіг 4. - Схема дезактивації, на Фіг.5. - схема охолодження, продувки, термообробки, на ФІг.6. - Маніпулятор руки, на Фіг.7. - маніпулятор ноги, на Фіг.8. розріз по А - А Фіг.6. на ФІг.9 - корпус, на Фіг. 10, функціональний блок, на Фіг. 1 1 . - розріз по В - В Фіг.9, на Фіг.12. - бот, на Фіг 13. захват, на Фіг.14. графік циклу роботи на Фіг. 15. - графік термообробки. Телеоператор /Фіг.1./ складається із ніякого гідроскафандра 1, що має шари 1а, 1в, 1с, корпуса 2 /під пдроскафандром/, маніпуляторів рук 3, 4, маніпуляторів ніг 5, 6, захватів 7, 8, бот 9, 10, шлему 11, телекамери 12, ранцевої гідростанції 13, Форсунок гіростабілізації 14, 15, антени 16, автоматичного клапана травлення 17, резервної акумуляторної батареї 18, сенсорів зовнішньої радіації 19, 20, сенсор зовнішньої температури 21, пробок злива пдрорідини 22, кабель шлангу 23. Загальна структурна схема керування /Фіг 2/ складається із пульта оператора 24, в якому розташовані комп'ютер оператора 25, монгтор комп'ютера 26, монітор телекамери 27, клавіатура керування 28, радюмодем 29, кабельний інтерфейс зв'язку з телеоператором ЗО через кабель шланг 31, станції енергоживлення 32, У корпусі телеоператора розташовані електронні функціональні блоки: центрального комп'ютера 33, основного та резервного керування маніпуляторами рук 34, 35, маніпуляторами ніг 36, 37, а також аварійного керування маніпуляторами 38. Керування захватами і ботами складається із двох рівнів інтерфейсів І основних блоків у корпусі 39, 40, 41, 42. Блоки керування гіростабїлізацією 43, гідростанцією 44, електроживлення 45, обробки сигналів радіації та температури 46, діагностики 47, керування телекамерою 48, виміру відстані до перешкод 49. Камера дезактивації 50 /Фіг.З/ має декілька призначень; для дезактивації, термообробки, зберігання та транспортування телеоператора і складається Із автоматичних дверей 51, вікна огляду 52, захисних рукавів доступу 53, бака збору рідини дезактивації 54, форсунки дезактивації 55, сенсорів радіації 56, блока обладнання і керування дезактивацією 57, блока обладнання та керування термообробкою 58, місцевого блока керування камерою 59, оглядової телекамери 60, автоматичної бобіни кабель - шлангу 61. Обладнання схеми дезактивації /Фіг.4./ виконує дезактивацію і низькотемпературну термообробку і складається із насоса дезактивації 62, Фільтра вилучення радіозолей бЗ.двох повітродувок 1728 повітродувок різного напору 64 65, підігрівана повітря 66, Фільтра радюзолей 67 та блоків керування 68, 69 сенсора температури повітря 70 Схема охолодження, продувки і термообробки /Фіг 5 / призначена для термообробки, охолодження і продувки функціональних блоків розташованих у герметизованому корпусі 2 і п обладнання розташовано у камері дезактивації 50 Схема має повітряний компресор 71, який через кабельшланг 23, бобіну 61 та трьох ПОЗИЦІЙНІ клапани 72, 73 подає повітря до блока простабшізації 43 Охолодження потрібне в разі підвищення температури у корпусі вище 70 градусів Цельсія і це робиться за допомогою охолодженого азоту Схема складається із балонів з азотом 74, холодильної машини 75, підігрівана 76, клапанів 77, 78, 79, сенсорів тиску 80 і температури 81, запобіжника тиску 82, мікропроцесорного блока керування 83 Маніпулятор руки /Фіг 6 / складається із модульних пдроприводів 84, 85, 86, 87, 88, 89, з'єднаних замками і утворюють маніпуляційну систему з шістьма ступенями свободи Привод 84 жорстко приєднано до корпуса 2, до привода 89 жорстко приєднано захват 7 або 8 Маніпулятор руки захищена пдроскафандром 1, що має три шари 1а, 1в, 1с Останній шар - це накидка із поліетилену чи бавовни, яку знімають перед дезактивацією і утилізують Між пдроскафандром і модульними пдроприводами всі порожнини заповнені пдрорідиною 90 яка використовується для роботи пдроприводів і забезпечує зменшення опромінення блоків керування приводів Маніпулятор ноги складається із модульних пдроприводів 91, 92, 93, 94, 95 які жорстко поєднанні замками і утворюють маніпуляційну систему з пятьма ступенями свободи Привод 91 жорстко приєднано до корпуса 2, до привода 95 жорстко приєднано бот 9, або 10 Захист від радіації виконано за допомогою трьохшарового пдроскафандра і пдрорідини аналогічно до маніпулятора руки Між приводами 92 і 93 розташовано гідроакумулятор 96 Розріз по А - А /Фіг 8 / виконано на Фіг 6 і призначено для розрахунків захисту від радіації двох систем керування модульних пдроприводів маніпуляторів рук і ніг На розрізі зображено сенсор радіації 97, мікроконтролери систем керування двох сміжних модульних пдроприводів 98, 99, епоксидна композитна заливка пасивних елементів системи керування 100, 101, захисні екрани 102, 103 На /Фіг 9 / корпуса 2 показано розташування функціональних блоків 104, і захисних екранів 105 між блоками а також гермитизуюча кришка 106 Функціональний блок /Фіг 10/ має монолітну конструкцію з захисними екранами 107, епоксидною композитною заливкою 108 і робочим та контрольним роз омами, 109, 110 На розрізі В - В - /Фіг 11 / який виконано поперек корпуса 2 показано ступень захисту центрального комп'ютера 33, а також розташування гідроакумуляторів 112, які виконують допоміжну захисну роль, трубопроводи і кабелі 113 Бот 9, 10 /Фіг 12/ складається із інтерфейсу 114, вібраційного насоса подачі пдрорідини до ранцевої гідростанції 115, ультразвукових сенсорів відстані до поверхні і перепон 116, сенсорів притулу 117, сенсора радіації 118, сенсора рівня пдрорідини 119, постійних магнітів для попередження ковзання по металевій поверхні 120 Захвати 7, 8, /Фіг 13/ скадаються із крокуючого електродвигуна приводу золотника 121, інтерфейсу системи керування 122, сенсора тиску пдрорідини в середині захвата 123, сенсора радіацГі 124, керуючого золотника 125, захисних екранів 126, еластичних рукавичок 127, сенсорів відстані 129, сенсорів притулу 130 Графік використання "робота-вщпочинок" /Фіг 14/ показує ЦИКЛІЧНІСТЬ роботи телеоператора Кожен цикл складається із тривалості роботи Тр, дезактивації Тд, термообробки Тт, відпочинку Тв У кожному циклі використання треба дотримуватись співвідношення Тр + Тд 10 4 РГр/с 10° 107 10 е -10 9 10 8 -10 9 С нейтр/с 10 1 4 ю15 ю15 ю15 ю15 ю5 >10 9 >10 А біт/сут. 10 D 7 10 -10"6 9 ю9 ~ ю 10- 7 -10" 8
ДивитисяДодаткова інформація
Автори англійськоюPurish Valentyn Zakharovych, Purysh Valentyn Zakharovych, Boichenko Tamara Mykhailivna, Koroliov Serhii Mykhailovych, Koroliova Halyna Valentynivna
Автори російськоюПуриш Валентин Захарович, Бойченко Тамара Михайловна, Королев Сергей Михайлович, Королева Галина Валентиновна
МПК / Мітки
МПК: G21F 9/00
Мітки: телеоператор
Код посилання
<a href="https://ua.patents.su/10-1728-teleoperator.html" target="_blank" rel="follow" title="База патентів України">Телеоператор</a>
Оптичний пристрій для вимірювання потужності та інтегральної дози іонізуючого випромінювання
Номер патенту: 34988
Опубліковано: 15.03.2001
Автори: Костецький Олексій Михайлович, Романюк Микола Миколайович, Кравців Роман Йосипович
МПК: G01N 23/20, G01T 1/202
Мітки: оптичний, потужності, дози, вимірювання, пристрій, інтегральної, іонізуючого, випромінювання
Формула / Реферат:
1. Оптичний пристрій для вимірювання потужності та інтегральної дози іонізуючого випромінювання, що складається з джерела світла, оптичного датчика радіації, відрізняється тим, що в нього введено чутливий елемент, виготовлений з оптично прозорого анізотропного кристалу у вигляді плоскопаралельної пластинки, та установки для вимірювання оптичного двозаломлення на експериментально встановленій фіксованій довжині хвилі, що відповідає...
Спосіб оцінки радіаційного ураження організму
Номер патенту: 17903
Опубліковано: 03.06.1997
Автор: Ткачишин Володимир Степанович
МПК: G01N 33/48, C12N 9/10, C12Q 1/48
Мітки: організму, радіаційного, ураження, оцінки, спосіб
Формула / Реферат:
Спосіб оцінки радіаційного ураження організму на основі дослідження крові, який відрізняється тим, що визначають активності аланінамінотрансферази (АЛТ) і аспартатамінотрансферази (ACT), порівнюють їх з розрахованими величинами, а отриману дозу опромінення знаходять за формулою:D = (D1 + D2):2 - 10,де D - ретроспективна доза опромінення (бер):D1 - доза опромінення, що оцінюється по активності АЛТ (бер);D2 - доза...
Спосіб вимірювання великих інтегральних доз іонізуючого випромінювання
Номер патенту: 34987
Опубліковано: 15.03.2001
Автори: Романюк Микола Олексійович, Костецький Олексій Михайлович, Кравців Роман Йосипович
МПК: G01T 1/00, G01T 1/202
Мітки: спосіб, іонізуючого, вимірювання, інтегральних, доз, великих, випромінювання
Формула / Реферат:
Спосіб вимірювання великих інтегральних доз іонізуючого випромінювання, який включає опромінення чутливого елемента іонізуючим випромінюванням і наступне освітлення джерелом світла, відрізняється тим, що використовують чутливі елементи із анізотропного оптично прозорого кристала, послідовно вимірюють їх початкове двозаломлення на фіксованій довжині хвилі, що відповідає максимальній чутливості до дози радіації, поміщають щонайменше один...
Попередній патент: Вузлове з’єднання стінової панелі з металевим каркасом
Наступний патент: Об’ємний дозатор рідини
Випадковий патент: Камера спалювання