Пристрій для визначення параметрів рельєфу поверхні
Номер патенту: 99040
Опубліковано: 12.05.2015
Автори: Колєнов Сергій Олександрович, Смирнов Євген Миколайович, Стельмах Олександр Устимович, Пільгун Юрій Вікторович
Формула / Реферат
Пристрій для визначення параметрів рельєфу поверхні, що являє собою пристрій для диференційно-фазової профілометрії та/або профілографії, який містить джерело випромінювання, як джерело випромінювання може бути використаний лазер, виконану з можливістю розширення світлового пучка першу оптичну систему, встановлені по ходу світлового пучка на загальній оптичній осі щонайменше два акустооптичних дефлектори і виконану з можливістю звуження світлового пучка другу оптичну систему, світлоподільник і об'єктив, при тому, що кожен з акустооптичних дефлекторів виконаний з можливістю розділення світлового пучка щонайменше на два промені, зміщення їх у просторі й по частоті та сканування вибраної ділянки досліджуваної поверхні по двох взаємоортогональних напрямках, два генератори керуючих сигналів для кожного акустооптичного дефлектора із загальним генератором опорного сигналу, причому виходи генераторів керуючих сигналів з'єднані зі входами відповідних акустооптичних дефлекторів через суматори, фотоприймач, фазовий детектор, блок керування та обробки даних, який відрізняється тим, що оптична ось, на якій встановлені джерело випромінювання, перший та другий акустооптичні дефлектори, перша та друга оптичні системи, світлоподільник та об'єктив, є ламаною, між першим та другим акустооптичними дефлекторами додатково встановлена телескопічна система Бадаля, фазовий детектор додатково містить частотний фільтр, підсилювач-обмежувач, лічильник-синхронізатор і цифровий лічильник, при тому, що вхід частотного фільтра, який одночасно є входом фазового детектора, зв'язаний з виходом фотоприймача, а вихід частотного фільтра зв'язаний зі входом підсилювача-обмежувача, вихід якого зв'язаний зі входом цифрового лічильника, вихід якого зв'язаний зі входом модуля вибору режиму роботи блока керування та обробки, який містить додатково модуль реконструкції рельєфу досліджуваної поверхні, модуль вибору режимів відображення та модуль керування розгорткою, при цьому виходи модуля вибору режиму роботи зв'язані зі входами модуля реконструкції рельєфу поверхні та модуля вибору режиму відображення, вихід модуля реконструкції рельєфу поверхні зв'язаний з входом модуля вибору режиму відображення, один з виходів модуля вибору режиму відображення зв'язаний зі входом модуля керування розгорткою, один з виходів якого зв'язаний, в свою чергу, зворотним зв'язком з входом модуля вибору режиму відображення, а другий вихід модуля вибору режиму відображення зв'язаний зі входом додатково встановленого відеомонітора, при тому, що інші виходи модуля керування розгорткою, які одночасно є виходами блока керування та обробки, зв'язані зі входами генераторів керуючих сигналів.
Текст
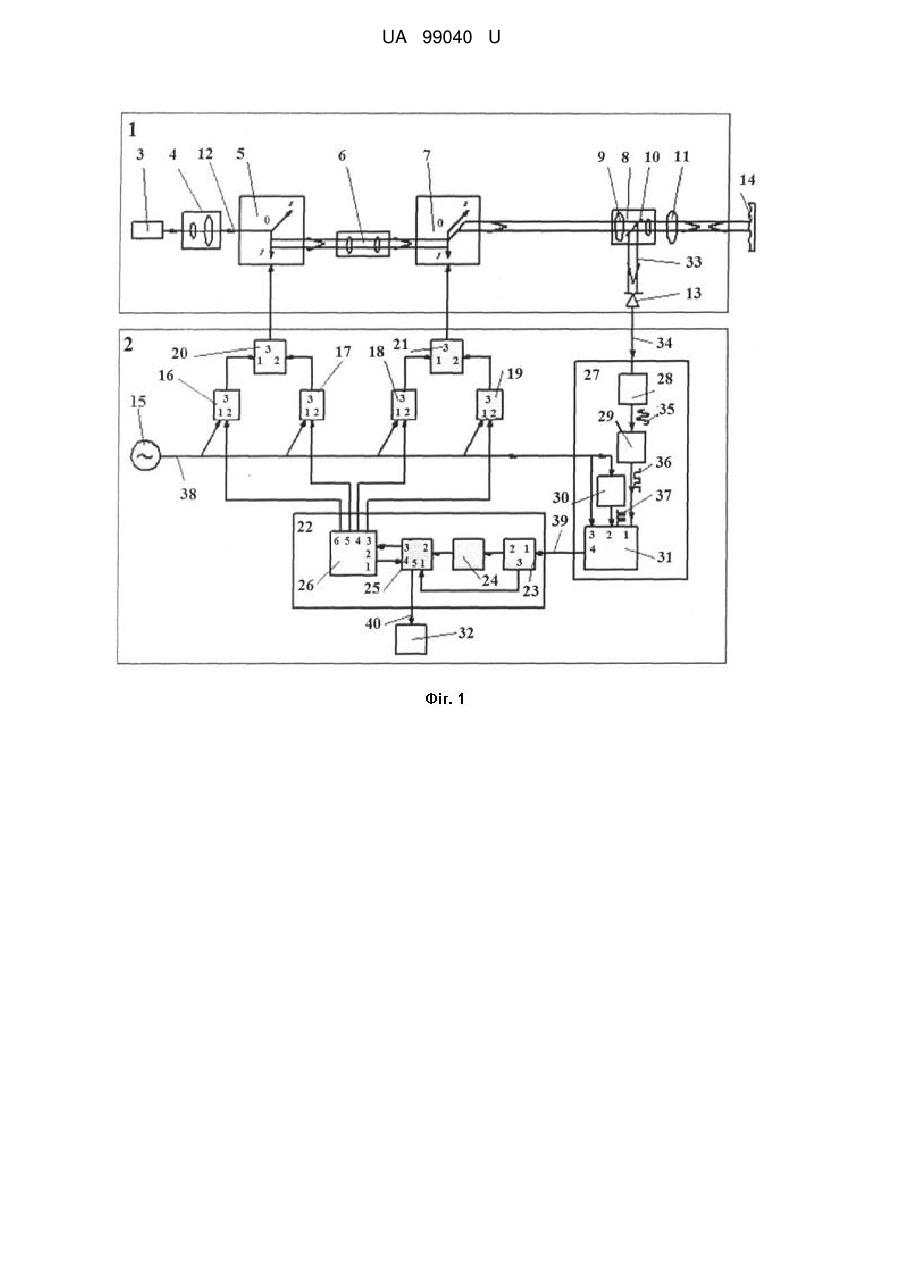
Реферат: Пристрій для визначення параметрів рельєфу поверхні являє собою пристрій для диференційно-фазової профілометрії та/або профілографії, який містить джерело випромінювання, за яке може бути використаний лазер, виконану з можливістю розширення світлового пучка першу оптичну систему, встановлені по ходу світлового пучка на загальній оптичній осі щонайменшедва акустооптичних дефлектори і виконану з можливістю звуження світлового пучка другу оптичну систему, світлоподільник і об'єктив, при тому, що кожен з акустооптичних дефлекторів виконаний з можливістю розділення світлового пучка щонайменше на два промені, зміщення їх у просторі й по частоті та сканування вибраної ділянки досліджуваної поверхні по двох взаємоортогональних напрямках, два генератори керуючих сигналів для кожного акустооптичного дефлектора із загальним генератором опорного сигналу, причому виходи генераторів керуючих сигналів з'єднані зі входами відповідних акустооптичних дефлекторів через суматори, фотоприймач, фазовий детектор, блок керування та обробки даних. Оптична ось, на якій встановлені джерело випромінювання, перший та другий акустооптичні дефлектори, перша та друга оптичні системи, світлоподільник та об'єктив, є ламаною, між першим та другим акустооптичними дефлекторами додатково встановлена телескопічна система Бадаля, фазовий детектор додатково містить частотний фільтр, підсилювач-обмежувач, лічильник-синхронізатор і цифровий лічильник, при тому, що вхід частотного фільтра, який одночасно є входом фазового детектора, зв'язаний з виходом фотоприймача, а вихід частотного фільтра зв'язаний зі входом підсилювача-обмежувача, вихід якого зв'язаний зі входом цифрового лічильника, вихід якого зв'язаний зі входом модуля вибору режиму роботи блока керування та обробки, який містить додатково модуль реконструкції рельєфу досліджуваної поверхні, модуль вибору режимів відображення та модуль керування розгорткою, при цьому виходи модуля вибору режиму роботи зв'язані зі входами модуля реконструкції рельєфу поверхні та модуля вибору режиму відображення, вихід модуля реконструкції рельєфу поверхні зв'язаний з входом модуля вибору режиму відображення, один з виходів модуля вибору режиму відображення зв'язаний зі входом модуля керування розгорткою, один з виходів якого зв'язаний, в свою чергу, зворотним зв'язком з входом модуля вибору режиму відображення, а другий вихід модуля вибору режиму відображення зв'язаний зі входом додатково встановленого відеомонітора, при тому, що інші виходи модуля керування розгорткою, які одночасно є виходами блока керування та обробки, зв'язані зі входами генераторів керуючих сигналів. UA 99040 U (54) ПРИСТРІЙ ДЛЯ ВИЗНАЧЕННЯ ПАРАМЕТРІВ РЕЛЬЄФУ ПОВЕРХНІ UA 99040 U UA 99040 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до оптичних вимірювальних пристроїв, зокрема до засобів оптичної профілометрії та/або профілографії, і може бути використана у машинобудуванні, особливо при створенні високоефективних трибосистем, у виробництві підшипників, у приладобудуванні, в автомобільній, авіаційній, ракетобудівній, електронній та оптичній промисловості, в біологи та медицині тощо, а також при технологічних процесах виготовлення деталей, агрегатів та машин озброєння і військового призначення для авіакосмічної та бронетанкової техніки ЗСУ як контрольно-вимірювальний прилад визначення експлуатаційних параметрів. Відомий оптичний пристрій, який містить акустооптичний елемент, джерело лазерного випромінювання, генератори електричних сигналів, пристрій розгортки променя, світлоподільник, об'єктив, фотоприймач та послідовно з'єднані змішувач, фазовий детектор та відеоконтрольний пристрій, причому акустооптичний елемент, пристрій розгортки променя, світлоподільник і об'єктив встановлені послідовно по ходу лазерного променя, виходи генераторів електричних сигналів підключені до входу акустооптичного елемента та до змішувача, пристрій розгортки променя містить блок управління, послідовно розташовані по ходу променя телескопічну оптичну систему, розташовані у взаємно перпендикулярних площинах два акустооптичних дефлектори і циліндричну лінзу, при цьому два акустооптичні дефлектори приєднані до блока управління, а фотоприймач, що розташований уздовж осі відбитого від світлоподільника променя, з'єднаний зі входом фазового детектора[1]. Недоліком цього технічного рішення є те, що у зазначеному пристрої розщеплення світлового пучка можливе тільки по одній осі, при цьому розщеплення світлового пучка найчастіше здійснюється тільки у напрямі сканування пучка, через що отримання даних про рельєф поверхні можливе тільки уздовж одного напряму, тобто по осі ОХ або осі OY. Відомий також оптичний пристрій, який містить акустооптичний елемент; джерело лазерного випромінювання; засіб для приводу в дію акустооптичного елемента для перетворення падаючого лазерного променя щонайменше на два промені з різними частотами; два світлоподільники, перший з яких розміщений між акустооптичним елементом та зразком на оптичній осі щонайменше двох направлених до поверхні зразка лазерних променів і використовується для їх розщеплення та для розщеплення світла, відбитого від зразка на перший і другий розщеплені промені світла, а другий використовується для відображення другого розділення променя, відбитого від першого світлоподільника; три приймачі світла, перший з яких щодо формування опорного сигналу биття реагує щонайменше на два лазерних промені, що розщеплені першим світлоподільником, другий щодо формування світлового сигналу биття реагує на перше відбиття розділеного променя, а третій призначений для детектування інтенсивності світла від частини другого відбиття розділеного променя світла щодо формування світлового сигналу; з'єднаний з першим та другим приймачами світла фазовий компаратор як засіб щодо порівняння інтенсивностей і фаз світлового сигналу биття від досліджуваної поверхні та опорного сигналу биття від зразка, а також обчислювальні прилади для розрахунку параметрів рельєфу досліджуваної поверхні [2]. Недоліками цього технічного рішення є необхідність порівняння параметрів досліджуваної поверхні з параметрами еталонної поверхні, яка має свої нерівності, а також те, що розщеплення світлового пучка у зазначеному пристрої можливе тільки по одній осі, при цьому розщеплення світлового пучка найчастіше здійснюється тільки у напрямі сканування пучка, через що отримати дані про рельєф досліджуваної поверхні можливе тільки уздовж одного напряму, тобто по осі ОХ або осі OY. В результаті отримують профілограму, тобто переріз рельєфу досліджуваної поверхні, чи набір таких профілограм у режимі растрового сканування. Проте, для відтворення рельєфу досліджуваної поверхні необхідно мати дані про зміну рельєфу поверхні вздовж обох осей (осі ОХ та осі OY) у площині сканування. Для зшивання отриманих профілограм з метою відтворення рельєфу досліджуваної поверхні необхідна додаткова інформація про початок відліку у кожній профілограмі, яка не вимірюється при такому способі дослідження - не враховувати цю інформацію можна лише у деяких випадках, наприклад, коли відомо, що досліджуваний об'єкт має відхилення від площинності на поверхні. Проте, реалізація такої можливості у пристроях диференційно-фазової профілометрії та/або профілографії вимагає забезпечення однакових умов розповсюдження світлових променів при розщепленні лазерного променя по осі ОХ та по осі OY, що висуває достатньо жорсткі вимоги до використовуваної оптичної схеми пристрою. Окрім цього, у складі оптичної схеми відомого пристрою є опорний канал, наявність якого небажана, оскільки також ускладнює оптичну схему пристрою, потребує окремого юстування, а також вносить додаткові похибки у вимірювані величини. 1 UA 99040 U 5 10 15 20 25 30 35 40 45 50 55 Найбільш близьким технічним рішенням, що вибрано за найближчий аналог (прототип), є пристрій для диференційно-фазової профілометрії та/або профілографії, який містить джерело випромінювання, за яке може бути використаний лазер; встановлені по ходу світлового пучка щонайменше два акустооптичних дефлектори, світлоподільник і об'єктив, при цьому кожен з акустооптичних дефлекторів виконаний з можливістю відхилення, сканування, а також розділення щонайменше частини світлового променя щонайменше на два промені по частоті і у просторі по одній з координат, водночас вказані акустооптичні дефлектори розташовані з можливістю відхилення, сканування і розподілу щонайменше частини світлового пучка, щонайменше по двох ортогональних координатах, пристрій також містить щонайменше два генератори керуючих сигналів для кожного акустооптичного дефлектора із загальним генератором опорної частоти для усіх генераторів керуючих сигналів кожного акустооптичного дефлектора, при цьому виходи генераторів керуючих сигналів з'єднані зі входом відповідного акустооптичного дефлектора через суматор, пристрій також містить фотоприймачі опорного й вимірювального сигналів і фазовий детектор, причому світлоподільник виконаний з можливістю спрямування частини світлового пучка від джерела світла на фотоприймач опорного сигналу і частини відбитого світлового пучка на фотоприймач вимірювального сигналу, вхід фазового детектора з'єднаний з виходами вказаних фотоприймачів, а вихід з блоком обробки даних, що містить перший модуль апроксимації, виконаний з можливістю апроксимації даних про різницю фаз відбитих променів світлового пучка в досліджуваних точках еталонної поверхні, третій модуль порівняння для коригування даних про різницю фаз відбитих променів в досліджуваних точках еталонної поверхні на основі вказаних апроксимованих даних, перший модуль інтегрування для інтегрування скоректованих даних про різницю фаз відбитих променів в досліджуваних точках еталонної поверхні уздовж траєкторій переміщення світлового пучка, пов'язаний з другим модулем апроксимації для апроксимації вказаних проінтегрованих даних, блок обробки даних містить також перший модуль порівняння для коригування даних про різницю фаз відбитих променів світлового пучка у відповідних точках досліджуваної поверхні на основі даних про різницю фаз відбитих променів світлового пучка у відповідних точках еталонної поверхні, другий модуль інтегрування, виконаний з можливістю інтегрування даних про різницю фаз відбитих променів світлового пучка в досліджуваних точках досліджуваної поверхні уздовж траєкторій переміщення світлового пучка, другий модуль порівняння для коригування згаданих проінтегрованих даних про різницю фаз відбитих променів світлового пучка для досліджуваної поверхні на основі згаданих даних, отриманих в результаті апроксимації проінтегрованих даних про різницю фаз відбитих променів світлового пучка у відповідних точках еталонної поверхні, крім того блок обробки даних містить модуль відображення інформації і модуль управління розгорткою, з'єднаний зі згаданими генераторами керуючих сигналів. При цьому фазовий детектор через аналого-цифровий перетворювач, модуль заглушування шуму і вузол вибору режиму роботи з'єднаний з входом третього модуля порівняння, першого модуля запам'ятовування і першого модуля апроксимації, вихід якого з'єднаний зі входом другого модуля запам'ятовування, вихід другого модуля запам'ятовування з'єднаний з другим входом згаданого третього модуля порівняння, вихід якого з'єднаний зі входом першого модуля інтегрування, а вихід першого модуля інтегрування з'єднаний зі входом другого модуля апроксимації, вихід якого з'єднаний зі входом третього модуля запам'ятовування, виходи першого і другого модулів запам'ятовування з'єднані зі входами першого модуля порівняння, вихід якого з'єднаний з першим входом другого модуля інтегрування, а другий вхід другого модуля інтегрування з'єднаний через модуль корекції з виходом згаданого першого модуля запам'ятовування, другий модуль інтегрування і третій модуль запам'ятовування з'єднані з входами другого модуля порівняння, вихід якого з'єднаний з першим входом модуля калібрування, а другий вхід модуля калібрування з'єднаний з другим виходом другого модуля інтегрування, вихід модуля калібрування з'єднаний з вузлом розрахунку параметрів поверхні, з'єднаним з першим входом модуля відображення інформації, з другим входом якого з'єднаний один з виходів вузла вибору режиму роботи, а з третім входом з'єднаний модуль управління розгорткою, виконаний з можливістю задання напряму розподілу світлового пучка і формування послідовності координат позиціонування світлового пучка на заданій області досліджуваної поверхні, з входом модуля управління розгорткою пов'язаний модуль установки меж області досліджуваної поверхні, вхід якого з'єднаний зі згаданим модулем відображення інформації. Крім цього, між джерелом світла і акустооптичними дефлекторами по ходу світлового пучка встановлена перша оптична система, виконана з можливістю розширення світлового пучка, а після акустооптичних дефлекторів встановлена друга оптична система, виконана з можливістю звуження світлового пучка [3]. 2 UA 99040 U 5 10 15 20 25 30 35 40 45 50 55 60 Недоліками прототипу є необхідність порівняння параметрів досліджуваної поверхні з параметрами еталонної поверхні, яка має свої нерівності, через що результати таких досліджень не є беззаперечними. Наявність похибок визначення параметрів рельєфу еталонного зразку призводить до додаткових похибок у вимірюванні та обробці даних щодо параметрів рельєфу досліджуваної поверхні. До того ж принципова схема пристрою, в тому числі двоканальна схема вимірювання параметрів рельєфу досліджуваної поверхні, схема блока обробки отриманих даних є надто складними. Окремий фотоприймач для виділення опорного сигналу ускладнює оптичну схему пристрою і вносить додаткові похибки. Таким чином, задача, на рішення якої спрямована корисна модель, полягає в удосконаленні відомого пристрою щодо забезпечення можливості визначення рельєфу будь-якої поверхні шляхом безпосередніх вимірювань її параметрів, що характеризують локальні нахили поверхні, без використання еталонних зразків, відтворення рельєфу досліджуваної поверхні, побудови її тримірного (3D) зображення шляхом спрощення його принципової функціональної схеми шляхом заміни двоканальної схеми визначення параметрів рельєфу досліджуваної поверхні на одноканальну і виключення окремого фотоприймача сигналів, отриманих від еталонного зразка, що використовуються для виділення опорного сигналу. Технічний результат, що досягається при реалізації корисної моделі, що заявляється, полягає у спрощенні принципової функціональної схеми, включаючи як електронну, так і оптичну частини відомого пристрою, щодо забезпечення безпосереднього вимірювання параметрів, що характеризують локальні нахили досліджуваної поверхні, та у забезпеченні точності й надійності результатів визначення її рельєфу з одночасним зменшенням часу обробки отриманих даних. Пристрій для визначення параметрів рельєфу поверхні, що забезпечує досягнення зазначеного вище технічного результату у всіх випадках, на які розповсюджується обсяг правової охорони, являє собою пристрій для диференційно-фазової профілометрії та/або профілографії, який містить джерело випромінювання, за яке може бути використаний лазер, перший та другий акустооптичні дефлектори, першу та другу оптичні системи, світлоподільник, об'єктив, які з'єднані між собою послідовно та механічно і встановлені по ходу світлового пучка таким чином, що мають загальну оптичну вісь, по два генератори керуючих сигналів для кожного акустооптичного дефлектора, встановлену між першим та другим акустооптичними дефлекторами телескопічну систему Бадаля, два суматори, генератор опорного сигналу, фотоприймач, фазовий детектор, блок керування та обробки, відеомонітор. Новим у запропонованому пристрої є те, що оптична ось, на якій встановлені джерело випромінювання, перший та другий акустооптичні дефлектори, перша та друга оптичні системи, світлоподільник та об'єктив, є ламаною, до складу пристрою додатково додані телескопічна система Бадаля та відеомонітор, фазовий детектор містить додатково частотний фільтр, підсилювач-обмежувач, лічильник-синхронізатор і цифровий лічильник, блок керування та обробки містить додатково модуль реконструкції рельєфу досліджуваної поверхні та модуль вибору режимів відображення, при тому, що вхід частотного фільтра, який одночасно є входом фазового детектора, зв'язаний з виходом фотоприймача, а вихід частотного фільтра зв'язаний зі входом підсилювача-обмежувача, вихід якого зв'язаний з першим входом цифрового лічильника. Водночас вихід генератора опорного сигналу зв'язаний з першими входами генераторів керуючих сигналів, зі входом лічильника-синхронізатора та третім входом цифрового лічильника, а вихід лічильника-синхронізатора зв'язаний з другим входом цифрового лічильника, вихід якого зв'язаний зі входом модуля вибору режиму роботи, який одночасно є входом блока керування та обробки, який містить додатково модуль реконструкції рельєфу досліджуваної поверхні, модуль вибору режимів відображення та модуль керування розгорткою, при цьому виходи модуля вибору режиму роботи зв'язані зі входами модуля реконструкції рельєфу поверхні та модуля вибору режиму відображення, вихід модуля реконструкції рельєфу поверхні зв'язаний з другим входом модуля вибору режиму відображення, один з виходів модуля вибору режиму відображення зв'язаний зі входом модуля керування розгорткою, один з виходів якого, в свою чергу, зв'язаний зворотнім зв'язком з четвертим входом модуля вибору режиму відображення, а другий - зі входом додатково встановленого відеомонітора, а другий вихід модуля вибору режиму відображення зв'язаний зі входом додатково встановленого відеомонітора, при тому, що інші виходи модуля керування розгорткою, які одночасно є виходами блока керування та обробки, зв'язані зі входами генераторів керуючих сигналів, виходи яких через суматори зв'язані зі входами першого і другого акустооптичних дефлекторів. Отже, поставлена задача вирішується тим, що до принципової схеми відомого пристрою внесені такі зміни: - оптична ось пристрою виконана ламаною; 3 UA 99040 U 5 10 15 20 25 30 35 40 45 50 55 60 - до складу пристрою додатково внесено телескопічну систему Бадаля для перенесення центру сканування з першого до другого акустооптичного дефлектора; - між лінзами другої оптичної системи встановлений світлоподільник; - зі складу пристрою вилучено фотоприймач опорного сигналу; - до складу фазового детектора додатково доданий частотний фільтр, що обмежує смугу частот вхідного сигналу, який відповідає відбитому оптичному сигналу та містить змінну складову сигналу з частотою f , що є головним носієм інформації про рельєф досліджуваної поверхні; - зі складу блока керування та обробки виключені модулі встановлення меж поверхні дослідження, заглушення шуму, апроксимації, інтегрування, запам'ятовування, розрахунку параметрів поверхні, а також аналого-цифровий перетворювач; - до складу блока керування та обробки додатково додані модуль реконструкції рельєфу поверхні та модуль вибору режиму відображення; - до складу пристрою додатково доданий відеомонітор. Можливість здійснення заявленої корисної моделі, охарактеризованої приведеними вище сукупностями ознак, щодо її призначення може бути проілюстрована детальним описом конструкції і роботи згідно з наступними графічними матеріалами: Фіг. 1 - принципова функціональна схема пристрою; Фіг. 2 - зовнішній вигляд пристрою; Фіг. 3 - як приклад, зображення імплантата кульшового суглоба та профілограма його поверхні. Принципова функціональна схема (Фіг. 1) пристрою, що заявляється, складається з двох частин - оптичної частини 1 та електронної частини 2. Оптична частина 1 пристрою містить джерело 3 випромінювання, першу оптичну систему 4, перший акустооптичний дефлектор 5, телескопічну систему Бадаля 6, другий акустооптичний дефлектор 7, другу оптичну систему 8, що містить лінзи 9 та світлоподільник 10, об'єктив 11, встановлені послідовно по ходу світлового пучка 12 та зв'язані між собою технологічно (оптично і механічно), та фотоприймач 13. Як джерела 3 випромінювання використовують джерело когерентного випромінювання з лінійною поляризацією (лазер). Оптична ось пристрою є ламаною, тобто зміщена у просторі від прямої (уявної) осі по відповідних напрямках (Y та X) - від дефлектора 5 через телескопічну систему 6 Бадаля до дефлектора 7 (по осі OY), від дефлектора 7 до досліджуваної поверхні 14 (по осі ОХ). Перша оптична система 4 виконана з можливістю розширення світлового пучка 12 на вході першого акустооптичного дефлектора 5. Акустооптичні дефлектори 5 та 7 виконані з можливістю розщеплення світлового пучка 12 на два пучки, їх зміщення у просторі та по частоті та сканування по одній з осей (ОХ або OY), і розташовані один відносно одного з поворотом на 90°. Телескопічна система 6 Бадаля дозволяє перенести центр сканування з першого акустооптичного дефлектора 5 до другого акустооптичного дефлектора 7. Друга оптична система 8 узгоджує діаметр скануючого пучка випромінювання з вхідною зіницею об'єктива 11 і виконана так, що світлоподільник 10 знаходиться на осі світлового пучка 12 між лінзами 9. Світлоподільник 10 поділяє світловий пучок на рівні частини - їх інтенсивності мають дорівнювати близько 50 % інтенсивності падаючого світла. Об'єктив 11 призначений для фокусування світлового пучка на досліджувану поверхню 14 та приймання відбитого світлового пучка. На фотоприймач 13 надходять відбиті від досліджуваної поверхні 14 світлові пучки з різною частотою. Фотоприймач 13 має забезпечувати високі чутливість, співвідношення сигнал/шум, динамічний діапазон та мінімальні фазові спотворення. Електронна частина 2 пристрою містить генератор 15 опорних сигналів; генератори 16, 17, 18 і 19 керуючих сигналів; суматори 20 і 21; блок 22 керування та обробки, що включає модуль 23 вибору режимів роботи, модуль 24 реконструкції рельєфу поверхні, модуль 25 вибору режимів відображення і модуль 26 керування розгорткою; фазовий детектор 27, що включає частотний фільтр 28, підсилювач-обмежувач 29, лічильник-синхронізатор 30 і цифровий лічильник 31, та відеомонітор 32. Елементи електронної частини 2 пристрою зв'язані між собою таким чином. Вихід фотоприймача 10 зв'язаний зі входом фазового детектора 27, який одночасно є входом частотного фільтра 28, при цьому вихід частотного фільтра 28 зв'язаний зі входом підсилювача-обмежувача 29, вихід якого зв'язаний з першим входом цифрового лічильника 31. Водночас вихід генератора 15 опорнихсигналів зв'язаний з першими входами генераторів 16, 17, 18 і 19 керуючих сигналів, зі входом лічильника-синхронізатора 30 та третім входом цифрового лічильника 31, при цьому вихід лічильника-синхронізатора 30 зв'язаний з другим входом цифрового лічильника 31, вихід якого зв'язаний зі входом блока 22 керування та 4 UA 99040 U 5 10 15 20 25 30 35 40 45 50 55 обробки, який одночасно є входом модуля 23 вибору режиму роботи. Другий вихід модуля 23 вибору режиму роботи зв'язаний зі входом модуля 24 реконструкції рельєфу поверхні, а третій з першим входом модуля 25 вибору режиму відображення, причому вихід модуля 24 реконструкції рельєфу поверхні зв'язаний з другим входом модуля 25 вибору режиму відображення, третій вихід модуля 25 вибору режиму відображення зв'язаний зі входом модуля 26 керування розгорткою, перший вихід якого, в свою чергу, зв'язаний зворотнім зв'язком з четвертим входом модуля 25 вибору режиму відображення, а п'ятий вихід модуля 25 вибору режиму відображення зв'язаний зі входом відеомонітора 32. Третій, четвертий, п'ятий і шостий виходи модуля 26 керування розгорткою зв'язані відповідно з другими входами генераторів 16, 17, 18 та 19 керуючих сигналів. Виходи генераторів 16 та 17 зв'язані відповідно з першим та другим входами суматора 20, а виходи генераторів 18 та 19 зв'язані відповідно з першим та другим входами суматора 21. Вихід суматора 20 зв'язаний зі входом першого акустооптичного дефлектора 5, а вихід суматора 21 зв'язаний зі входом другого акустооптичного дефлектора 7. Фазовий детектор 27 забезпечує вимірювання параметрів щодо різниці фаз відбитих від досліджуваної поверхні 14 світлових пучків 33, які відповідають параметрам рельєфу досліджуваної поверхні. Частотний фільтр 28 фазового детектора 27 обмежує смугу частот вхідного сигналу 34, який відповідає відбитому оптичному сигналу 33 і містить змінну складову з частотою f , що є головним носієм інформації про рельєф досліджуваної поверхні 14 у вибраній для дослідження множині точок, яка складається з рядів точок, розташованих уздовж осі ОХ, та окремо з рядів точок, розташованих уздовж осі OY, при цьому отримані дані зберігаються для кожної вибраної точки, крім координати кожної точки враховується напрямок і величина розщеплення світлових пучків, що були встановлені при вимірюванні даної точки. Водночас частотний фільтр 28 виокремлює змінну складову сигналу з частотою f у вигляді періодичного сигналу 35. Підсилювач-обмежувач 29 забезпечує відповідність фази вихідного прямокутного сигналу 36 фазі вхідного синусоїдального сигналу 35 незалежно від коливань амплітуди останнього. Прямокутний сигнал 36 використовують як цифровий сигнал для подальшого визначення фази досліджуваного сигналу. Лічильник-синхронізатор 30 на основі опорного сигналу 38 генератора 15 опорних сигналів генерує стартовий сигнал 37. Цифровий лічильник 31 здійснює виміряння фази прямокутного сигналу 36 відносно фази стартового сигналу 37. Блок 22 керування та обробки забезпечує опрацювання сигналу 39, що виходить з цифрового лічильника 31 і вносить необхідну складову у формування керуючих сигналів для акустооптичних дефлекторів 5 і 7, які, в свою чергу, забезпечують сканування досліджуваної поверхні 14 розщепленими та зміщеними у просторі і по частоті світловими пучками по заданих траєкторіях. Модуль 23 вибору режимів роботи блока 22 керування та обробки дозволяє задавати режим сканування та зчитування параметрів рельєфу досліджуваної поверхні 14 шляхом вимірювання кінцевих приростів її висоти по осям ОХ та OY або задавати режим виводу даних щодо параметрів рельєфу досліджуваної поверхні 14 на модуль 25 вибору режимів відображення. Модуль 24 реконструкції рельєфу поверхні блока 22 керування та обробки на основі сигналів, що надходять від фазового детектора 27, формує дані щодо параметрів рельєфу досліджуваної поверхні 14 та спрямовує їх до модуля 25 вибору режимів відображення. Модуль 25 вибору режимів відображення блока 22 керування та обробки здійснює вибір форми представлення даних, отриманих з модуля 23 вибору режимів роботи і модуля 24 реконструкції рельєфу поверхні, для передачі їх на вхід відеомонітора 32. Модуль 26 керування розгорткою блока 22 керування та обробки визначає кількість точок сканування, що зчитуються, утворює сигнали, які відповідають вибраним параметрам сканування, та спрямовує їх до генераторів 16, 17, 18 і 19 керуючих сигналів, куди з виходу генератора 15 опорних сигналів також надходить сигнал 38. Генератори 16, 17, 18 і 19 керуючих сигналів перетворюють сигнали, що надходять з блока 22 керування та обробки, разом з сигналом 38 генератора 15 опорних сигналів у керуючі сигнали, які через суматори 20 і 21 надходять до акустооптичних дефлекторів 5 і 7 та керують розщепленням, зміщенням і скануванням світлового пучка 12. Вихідний відеосигнал 40 з блока 22 керування та обробки надходить на екран відеомонітора 32, на якому у режимі реального часу спостерігають параметри, що характеризують локальні нахили, і/або зображення рельєфу досліджуваної поверхні 14 у вибраному масштабі та вибраній гамі кольорів. 5 UA 99040 U 5 10 15 20 25 30 35 40 45 50 55 60 Приклад використання заявленого пристрою у машинобудівельних галузях показаний на Фіг. 2, де на екрані відеомонітору показане зображення поверхні напиленого золотом (Ra=30 нм) стандартного скляного еталону шорсткості поверхні за ГОСТом 2789-73. Приклад використання заявленого пристрою у біології та медицині показаний на Фіг. 3, де зображені імплантат кульшового суглобу людини для ендопротезування (зліва) та профілограма його поверхні (справа). Пристрій, що заявляється, працює таким чином. Джерело 3 випромінювання (Фіг. 1) генерує світловий пучок 12, який розширюється у першій оптичній системі 4, проходить перший акустооптичний дефлектор 5, який розщеплює світловий пучок 12 на дві частини для зміщення їх у просторі, наприклад по осі OY, та подальшого сканування, проходить телескопічну систему 6 Бадаля, яка переносить центр сканування з першого 5 до другого 7 акустооптичного дефлектора. Другий акустооптичний дефлектор 7 розщеплює світловий пучок, що надходить з першого акустооптичного дефлектора 5 через телескопічну систему 6 Бадаля, на дві частини для зміщення їх у просторі, наприклад, по осі ОХ, та для подальшого сканування. Розщеплений світловий пучок надходить до другої (звужуючої) оптичної системи 8, між лінзами 9 якої розміщено світлоподільник 10. Після проходження другої оптичної системи 8 світловий пучок попадає на лінзи об'єктива 11 і далі на досліджувану поверхню 14. Відбитий від поверхні світлоподільника 10 і, відповідно, від досліджуваної поверхні 14 оптичний сигнал 33 надходить до фотоприймача 13, де перетворюється у його електричний аналог - сигнал 34, який надходить на вхід фазового детектора 27. Після фотоприймача 13 електричний сигнал 34 містить змінну частотну компоненту f , фаза якої несе інформацію про різницю фаз відбитих від досліджуваної поверхні 14 світлових пучків 33 та є головним носієм інформації про рельєф досліджуваної поверхні 14. Фаза змінної частотної компоненти f реєструється фазовим детектором 27, причому частотний фільтр 28, що міститься у складі фазового детектора 27, виокремлює необхідну частотну компоненту f у вигляді періодичного сигналу 35, який обробляє підсилювач-обмежувач 29 таким чином, що на його виході утворюється сигнал прямокутної форми 36 з фазою, що відповідає фазі вхідного синусоїдального сигналу 35 незалежно від коливань амплітуди останнього. Прямокутний сигнал 36 потрапляє на цифровий лічильник 31, який визначає фазу прямокутного сигналу 36 (що відповідає змінній частотній компоненті f ) відносно стартового сигналу 37, що генерує лічильник-синхронізатор 30 на основі опорного сигналу 38 генератора 15 опорних сигналів, причому початкова фаза змінної частотної компоненти f збігається з фазою стартового сигналу 37 завдяки одночасному використанню спільного генератора 15 опорних сигналів як для генерування керуючих сигналів для акустооптичних дефлекторів 5 і 7, так і як опорний сигнал для лічильника-синхронізатора 30. Вихідний сигнал 39 цифрового лічильника 31, що відповідає фазі прямокутного сигналу 36 і, відповідно, параметрам рельєфу досліджуваної поверхні 14 обробляється блоком 22 керування та обробки і спрямовується на екран відеомонітора 32 у вигляді відеосигналу 40. В результаті на екрані відеомонітора 32 спостерігають параметри і/або зображення рельєфу досліджуваної поверхні 14 у вибраному режимі. Пристрій, що заявляється, забезпечує можливість безпосереднього вимірювання параметрів, що характеризують локальні нахили рельєфу поверхні, і побудови тримірного (3D) зображення рельєфу поверхні без використання еталонних зразків, має спрощені принципову функціональну схему та конструктивне виконання щодо відомого пристрою диференційнофазової профілометри та/або профілографи, а також високу чутливість, високу швидкодію та високу ступінь віброзахисту - принцип диференційно-фазового вимірювання забезпечує сканування досліджуваної поверхні одночасно двома лазерними пучками, що розповсюджуються практично по одному шляху, тобто будь-які зміни оптичної довжини шляху, що виникають при вібрації, однаково впливають на фазу кожного зі скануючих пучків і взаємно компенсуються при реєстрації сигналів на детекторі та, як результат, забезпечує підвищення точності й надійності вимірювань. Джерела інформації: 1. Патент України № 19905 Спосіб дослідження рельєфних та фазових об'єктів у лазерному скануючому мікроскопі та пристрій для його здійснення (перереєстроване Авторське Свідоцтво СРСР № 1734066 А1 від 30.03.1989), G02 В21/00, 25.12.1997. 2. Патент США № 5481360 А Оптичний пристрій для вимірювання форми поверхні (Optical device for measuring surface shape), G01 В11/00, 02.01.1996. 3. Патент Російської Федерації на винахід № 2179328 Спосіб диференціально-фазової профілометри та/або профілографи та пристрій для його реалізації, G02 В21/00, G01 В11/30, 19.06.2001. 6 UA 99040 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 30 35 Пристрій для визначення параметрів рельєфу поверхні, що являє собою пристрій для диференційно-фазової профілометрії та/або профілографії, який містить джерело випромінювання, як джерело випромінювання може бути використаний лазер, виконану з можливістю розширення світлового пучка першу оптичну систему, встановлені по ходу світлового пучка на загальній оптичній осі щонайменше два акустооптичних дефлектори і виконану з можливістю звуження світлового пучка другу оптичну систему, світлоподільник і об'єктив, при тому, що кожен з акустооптичних дефлекторів виконаний з можливістю розділення світлового пучка щонайменше на два промені, зміщення їх у просторі й по частоті та сканування вибраної ділянки досліджуваної поверхні по двох взаємоортогональних напрямках, два генератори керуючих сигналів для кожного акустооптичного дефлектора із загальним генератором опорного сигналу, причому виходи генераторів керуючих сигналів з'єднані зі входами відповідних акустооптичних дефлекторів через суматори, фотоприймач, фазовий детектор, блок керування та обробки даних, який відрізняється тим, що оптична ось, на якій встановлені джерело випромінювання, перший та другий акустооптичні дефлектори, перша та друга оптичні системи, світлоподільник та об'єктив, є ламаною, між першим та другим акустооптичними дефлекторами додатково встановлена телескопічна система Бадаля, фазовий детектор додатково містить частотний фільтр, підсилювач-обмежувач, лічильниксинхронізатор і цифровий лічильник, при тому, що вхід частотного фільтра, який одночасно є входом фазового детектора, зв'язаний з виходом фотоприймача, а вихід частотного фільтра зв'язаний зі входом підсилювача-обмежувача, вихід якого зв'язаний зі входом цифрового лічильника, вихід якого зв'язаний зі входом модуля вибору режиму роботи блока керування та обробки, який містить додатково модуль реконструкції рельєфу досліджуваної поверхні, модуль вибору режимів відображення та модуль керування розгорткою, при цьому виходи модуля вибору режиму роботи зв'язані зі входами модуля реконструкції рельєфу поверхні та модуля вибору режиму відображення, вихід модуля реконструкції рельєфу поверхні зв'язаний з входом модуля вибору режиму відображення, один з виходів модуля вибору режиму відображення зв'язаний зі входом модуля керування розгорткою, один з виходів якого зв'язаний, в свою чергу, зворотним зв'язком з входом модуля вибору режиму відображення, а другий вихід модуля вибору режиму відображення зв'язаний зі входом додатково встановленого відеомонітора, при тому, що інші виходи модуля керування розгорткою, які одночасно є виходами блока керування та обробки, зв'язані зі входами генераторів керуючих сигналів. 7 UA 99040 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Автори англійськоюSmyrnov Yevhen Mykolaiovych, Stelmakh Oleksandr Ustymovych
Автори російськоюСмирнов Евгений Николаевич, Стельмах Александр Устимович
МПК / Мітки
МПК: G01B 11/30, G02B 21/00
Мітки: визначення, рельєфу, параметрів, пристрій, поверхні
Код посилання
<a href="https://ua.patents.su/10-99040-pristrijj-dlya-viznachennya-parametriv-relehfu-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення параметрів рельєфу поверхні</a>
Пристрій для визначення рельєфу та рівня поверхні матеріалів
Номер патенту: 31479
Опубліковано: 15.12.2000
Автор: Головченко Анатолій Семенович
МПК: G01B 15/00
Мітки: пристрій, визначення, рівня, матеріалів, рельєфу, поверхні
Текст:
...контролю поверхні матеріалів, блоки джерела \ гфийміїча разом з відповідними механізмами поворотів виводяться по сигналам блока 1У в режим пеленгуючих поворотів відносно їх других осей- Пеленгуючі повороти здійснюються так, що гоніт перетину осей колімації відповідних блоків джерела і приймача (точки локації) наближаються до контрольованої поверхні. При цьому блоки ирііимача її і і2 разом з механізмами поворотів ІЗ і \G виконують роль...
Спосіб визначення параметрів поверхні об’єкта
Номер патенту: 99039
Опубліковано: 12.05.2015
Автори: Смирнов Євген Миколайович, Колєнов Сергій Олександрович, Стельмах Олександр Устимович, Пільгун Юрій Вікторович
МПК: G02B 21/00, G01B 11/30
Мітки: об'єкта, поверхні, параметрів, визначення, спосіб
Формула / Реферат:
Спосіб визначення параметрів рельєфу поверхні, з використанням методу диференційно-фазової профілометри і/або профілографи, який відрізняється тим, що сканування досліджуваної поверхні здійснюють двома світловими пучками, що утворені завдяки почерговому розщепленню світлового пучка у кожному з двох акустооптичних дефлекторів зі зміщенням у просторі та по частоті, по двох взаємоортогональних напрямках із суміщенням центрів сканування за...
Пристрій для реєстрації рельєфу поверхні абразивних інструментів на металевій зв’язці
Номер патенту: 75483
Опубліковано: 17.04.2006
Автори: Азарова Наталя Вікторівна, Полтавець Валерій Васильович, Цокур Віктор Пантелійович, Константинов Сергій Всеволодович, Литвиненко Олександр Васильович, Матюха Петро Григорович
Мітки: зв'язці, пристрій, рельєфу, реєстрації, металевій, абразивних, поверхні, інструментів
Формула / Реферат:
Пристрій для реєстрації рельєфу поверхні абразивних інструментів на металевій зв'язці, що містить струмопровідну щупальну голку, датчик переміщення голки, ключовий елемент, керуючий вхід якого підключений до щупальної голки, джерело струму, один з полюсів якого з'єднаний з землею, а другий призначений для підключення до струмопровідної зв'язки алмазного інструмента, і блок реєстрації, який відрізняється тим, що як блок реєстрації використаний...
Спосіб визначення рельєфу та рівня поверхні матеріалів
Номер патенту: 31522
Опубліковано: 15.12.2000
Автор: Головченко Анатолій Семенович
МПК: G01F 23/28, G01B 15/00
Мітки: рельєфу, визначення, матеріалів, рівня, поверхні, спосіб
Текст:
...17.,.20, І відповідають умові стрибкоподібної зміни температури. Така уме аиникас в зоні стикуванняt контрольованої поверхні 1 зі стінками колосники г тобто в шуканих точках 13.. Л 6. Попередні значення координат додаткових точок поверхні площинах 21 і 22 задають у відповідності з типовими розрахункова профілями 23 і 24 поверхні, причому ці профілі суміщують попередньо визначеними точками відповідно 15, 8, 16 і 13, 9, Додаткові...
Пристрій для утворення на плоскій поверхні тертя рельєфу заглибин, що утримують мастильні матеріали
Номер патенту: 13762
Опубліковано: 17.04.2006
Автори: Шульга Іван Федорович, Плюснін Олег Євтихійович, Марчук Володимир Єфремович, Шульга Олександр Іванович
Мітки: тертя, заглибин, пристрій, плоский, матеріали, рельєфу, утворення, поверхні, мастильні, утримують
Формула / Реферат:
Пристрій для утворення на плоскій поверхні тертя рельєфу заглибин, що утримують мастильні матеріали, який містить привідний вал, кулачок, призначений для качання коромисла на заданий кут, коромисло, вісь коромисла, стояк осі коромисла, пружину, регулювальний гвинт, розташований на кінці коромисла, контргайку регулювального гвинта, який відрізняється тим, що регулювальний гвинт містить бойок, який фіксується за допомогою механізму кріплення,...
Попередній патент: Спосіб визначення параметрів поверхні об’єкта
Наступний патент: Система для практичного навчання пошуку та бронювання туристичних продуктів
Випадковий патент: Процес моделювання пародонтиту