Спосіб визначення параметрів поверхні об’єкта
Номер патенту: 99039
Опубліковано: 12.05.2015
Автори: Стельмах Олександр Устимович, Колєнов Сергій Олександрович, Смирнов Євген Миколайович, Пільгун Юрій Вікторович
Формула / Реферат
Спосіб визначення параметрів рельєфу поверхні, з використанням методу диференційно-фазової профілометри і/або профілографи, який відрізняється тим, що сканування досліджуваної поверхні здійснюють двома світловими пучками, що утворені завдяки почерговому розщепленню світлового пучка у кожному з двох акустооптичних дефлекторів зі зміщенням у просторі та по частоті, по двох взаємоортогональних напрямках із суміщенням центрів сканування за допомогою телескопічної системи Бадаля, що розміщена між першим та другим акустооптичними дефлекторами, причому вибрану ділянку досліджуваної поверхні сканують у кожній точці спочатку у напрямку першої осі двома світловими пучками, що розщеплені в площині першої осі, а потім у напрямку другої осі, яка ортогональна першій, двома світловими пучками, що розщеплені в площині другої осі, відбиті від досліджуваної поверхні промені спрямовують до світлоприймача, вимірювання параметрів рельєфу досліджуваної поверхні здійснюють одночасно з її скануванням шляхом визначення фази змінної складової фотоструму, частота якої ![]() дорівнює різниці між частотними параметрами кожного з пари скануючих світлових пучків, причому параметри кожної окремої точки досліджуваної поверхні вимірюють двічі, на початку наступного та наприкінці попереднього такту сканування.
дорівнює різниці між частотними параметрами кожного з пари скануючих світлових пучків, причому параметри кожної окремої точки досліджуваної поверхні вимірюють двічі, на початку наступного та наприкінці попереднього такту сканування.
Текст
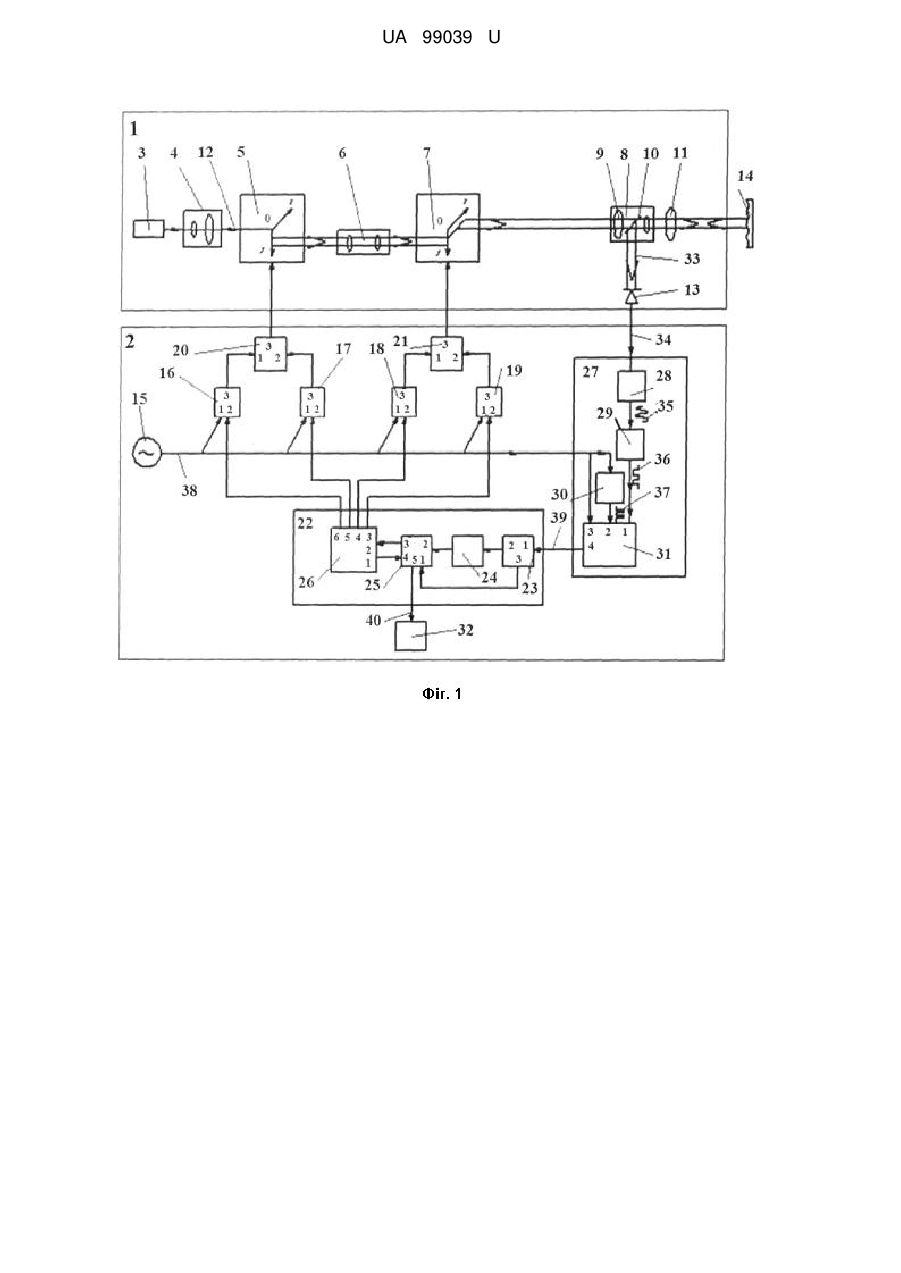
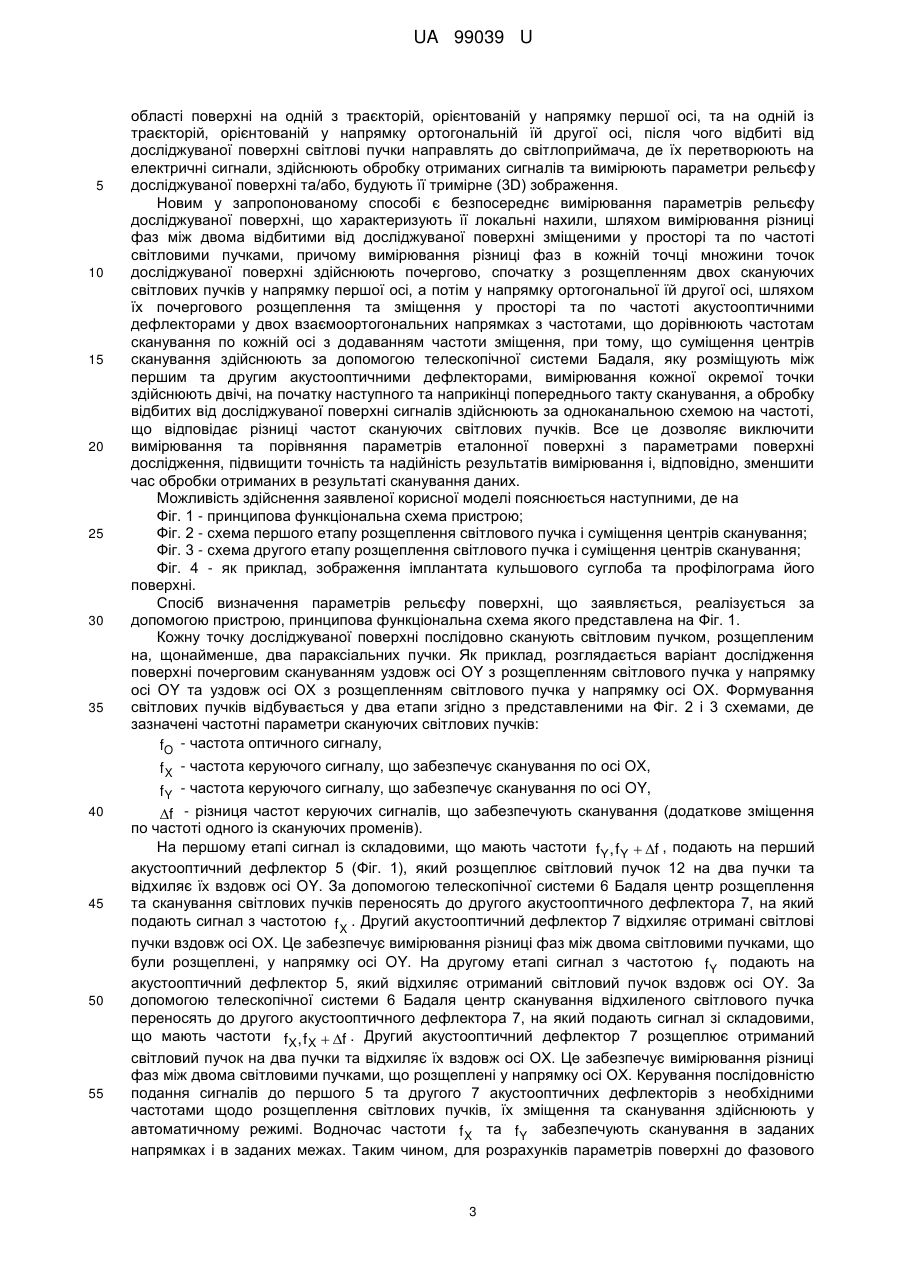
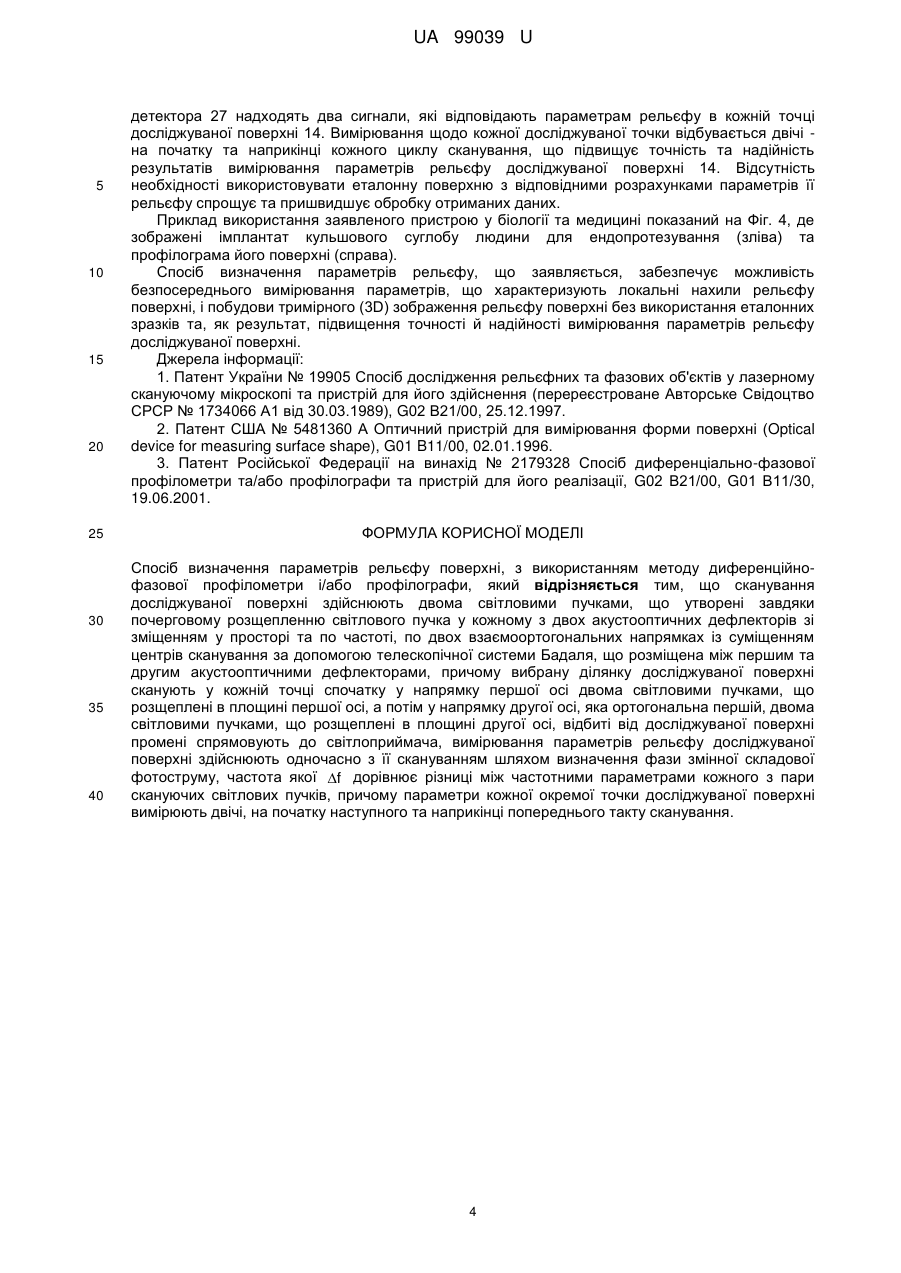
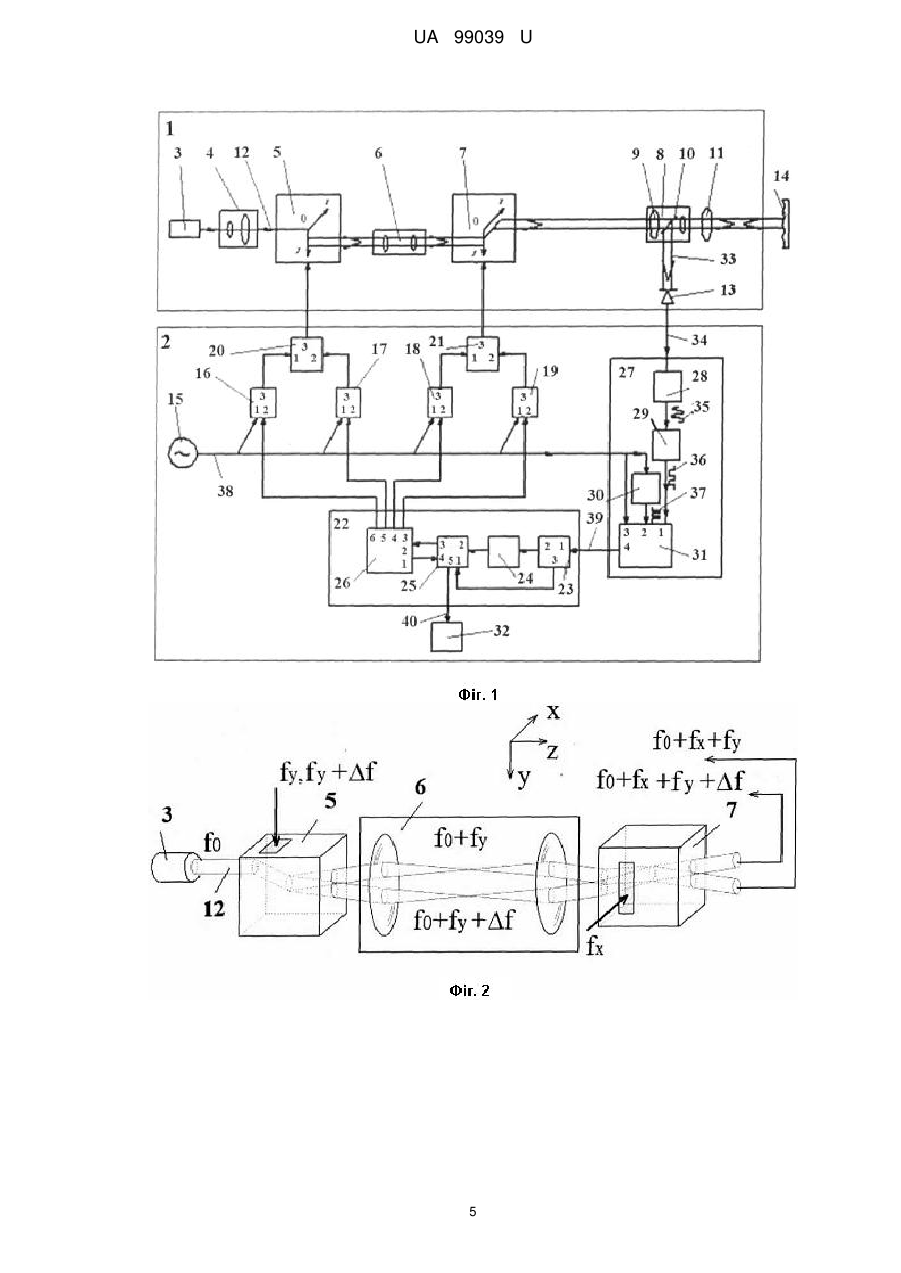
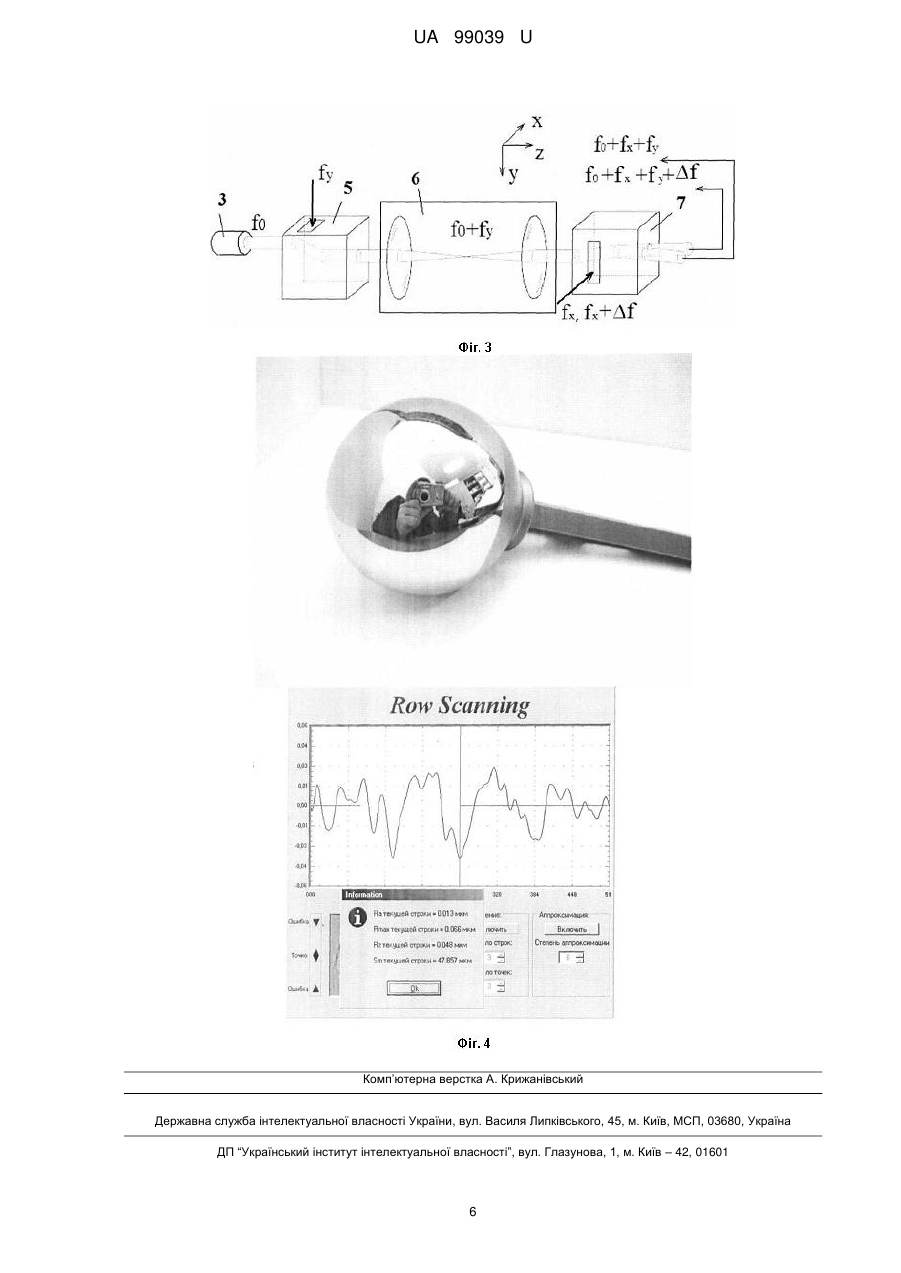
Реферат: Спосіб визначення параметрів рельєфу поверхні з використанням методу диференційнофазової профілометри і/або профілографи. Сканування досліджуваної поверхні здійснюють двома світловими пучками, що утворені завдяки почерговому розщепленню світлового пучка у кожному з двох акустооптичних дефлекторів зі зміщенням у просторі та по частоті, по двох взаємоортогональних напрямках із суміщенням центрів сканування за допомогою телескопічної системи Бадаля, що розміщена між першим та другим акустооптичними дефлекторами, причому вибрану ділянку досліджуваної поверхні сканують у кожній точці спочатку у напрямку першої осі двома світловими пучками, що розщеплені в площині першої осі, а потім у напрямку другої осі, яка ортогональна першій, двома світловими пучками, що розщеплені в площині другої осі, відбиті від досліджуваної поверхні промені спрямовують до світлоприймача, вимірювання параметрів рельєфу досліджуваної поверхні здійснюють одночасно з її скануванням шляхом визначення фази змінної складової фотоструму, частота якої f дорівнює різниці між частотними параметрами кожного з пари скануючих світлових пучків, причому параметри кожної окремої точки досліджуваної поверхні вимірюють двічі, на початку наступного та наприкінці попереднього такту сканування. UA 99039 U (54) СПОСІБ ВИЗНАЧЕННЯ ПАРАМЕТРІВ ПОВЕРХНІ ОБ'ЄКТА UA 99039 U UA 99039 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до способів та засобів оптичної профілометрії та/або профілографи і може бути використана у машинобудуванні, особливо при створенні високоефективних трибосистем, у виробництві підшипників, у приладобудуванні, в автомобільній, авіаційній, ракетобудівній, електронній та оптичній промисловості, в біології та медицині тощо, а також при технологічних процесах виготовлення деталей, агрегатів та машин озброєння і військового призначення для авіакосмічної та бронетанкової техніки ЗСУ як контрольно-вимірювальний прилад визначення експлуатаційних параметрів. Відомий спосіб дослідження рельєфних і фазових об'єктів у лазерному скануючому мікроскопі, який полягає у тому, що зображення об'єкта формують шляхом порівняння фаз світлових пучків, відбитих від поверхні об'єкта в двох точках, рознесених на діаметр світлової плями, перетворення цієї різниці фаз в електричний сигнал з фазовою демодуляцією та модуляції електричним сигналом відповідної точки зображення, причому лазерний пучок розділяють на два параксіальних пучки, кожний з яких одночасно зміщують по частоті з різними значеннями зміщення, синхронно розгортають їх по поверхні об'єкта та оптично змішують два відбитих від поверхні променя [1]. Недоліком цього технічного рішення є те, що розщеплення світлового пучка у зазначеному пристрої можливе тільки по одній осі, при цьому розщеплення світлового пучка найчастіше здійснюється тільки у напрямі сканування пучка, через що отримання даних про рельєф поверхні можливе тільки уздовж одного напряму, тобто по осі ОХ або осі OY. Відомий також спосіб вимірювання рельєфу досліджуваної поверхні шляхом порівняння його з визначеним рельєфом зразка [2]. Недоліками цього технічного рішення є необхідність порівняння параметрів досліджуваної поверхні з параметрами еталонної поверхні, яка має свої нерівності, а також те, що розщеплення світлового пучка у зазначеному пристрої можливе тільки по одній осі, при цьому розщеплення світлового пучка найчастіше здійснюється тільки у напрямі сканування пучка, через що отримати дані про рельєф досліджуваної поверхні можливе тільки уздовж одного напряму, тобто по осі ОХ або осі OY. В результаті отримують профілограму, тобто переріз рельєфу досліджуваної поверхні, чи набір таких профілограм у режимі растрового сканування. Проте, для відтворення рельєфу досліджуваної поверхні необхідно мати дані про зміну рельєфу поверхні вздовж обох осей (осі ОХ та осі OY) у площині сканування. Для зшивання отриманих профілограм з метою відтворення рельєфу досліджуваної поверхні необхідна додаткова інформація про початок відліку у кожній профілограмі, яка не вимірюється при такому способі дослідження - не враховувати цю інформацію можна лише у деяких випадках, наприклад, коли відомо, що досліджуваний об'єкт має відхилення від площинності на поверхні. Проте, реалізація такої можливості у пристроях диференційно-фазової профілометри та/або профілографи вимагає забезпечення однакових умов розповсюдження світлових променів при розщепленні лазерного променю по осі ОХ та по осі OY, що висуває достатньо жорсткі вимоги до використовуваної оптичної схеми пристрою. Окрім цього, у складі оптичної схеми відомого пристрою є опорний канал, наявність якого небажана, оскільки також ускладнює оптичну схему пристрою, потребує окремого юстування, а також вносить додаткові похибки у вимірювані величини. Найбільш близьким технічним рішенням, що вибрано за найближчий аналог (прототип), є спосіб диференційно-фазової профілометри і профілографи, який полягає в тому, що спочатку сканують світловим пучком еталонну поверхню, а потім по тих же траєкторіях сканують досліджувану поверхню, при цьому послідовно сканують кожну точку як досліджуваної, так і еталонної поверхні щонайменше першим та другим світловими пучками, причому вказані світлові пучки розділяють щонайменше два параксіальних промені щонайменше один з яких зміщують відносно інших по частоті та у просторі уздовж першої осі в першому світловому пучку та уздовж ортогональної їй другої осі в другому світловому пучку, при цьому вимірюють різницю фаз відбитих променів для вибраної кількості точок сканованої поверхні, апроксимують двовимірною функцією дані про різницю фаз відбитих променів, що отримані при скануванні еталонної поверхні, потім на основі вказаних апроксимованих даних коригують дані про різницю фаз відбитих променів, що отримані при скануванні еталонної поверхні, і здійснюють двовимірне інтегрування скоректованих даних, що отримані при скануванні еталонної поверхні, уздовж траєкторій переміщення світлових пучків та апроксимують вказані проінтегровані дані двовимірною функцією, потім коригують дані про різницю фаз відбитих променів, що отримані при скануванні досліджуваної поверхні, на основі згаданих апроксимованих даних про різницю фаз відбитих променів у відповідних точках еталонної поверхні і здійснюють двовимірне інтегрування скоректованих даних, що отримані при скануванні досліджуваної поверхні, уздовж траєкторій переміщення світлових пучків, коригують вказані проінтегровані дані на основі 1 UA 99039 U 5 10 15 20 25 30 35 40 45 50 55 60 згаданих проінтегрованих та апроксимованих даних про різницю фаз відбитих променів у відповідних точках еталонної поверхні, після чого будують зображення і визначають параметри рельєфу досліджуваної поверхні. При цьому сканування здійснюють шляхом переміщення світлового пучка від однієї точки поверхні до іншої паралельно оптичної осі по траєкторіях у вигляді еквідистантних ліній, що починаються і закінчуються на межі заданої області досліджуваної поверхні, причому при скануванні спочатку здійснюють переміщення світлового пучка через досліджувані точки заданої області сканованої поверхні по еквідистантних траєкторіях у напрямі першої осі, а потім через згадані точки заданої області сканованої поверхні по еквідистантних траєкторіях у напрямі другої осі, ортогональної першій, переміщення світлового пучка через досліджувані точки заданої області сканованої поверхні здійснюють шляхом послідовного переміщення світлового пучка через кожну множину точок вказаної області, утворену точками, що лежать між її межами на одній з траєкторій, орієнтованих у напрямі першої осі, і на одній з траєкторій, орієнтованих у напрямі ортогональної їй другої ос, щонайменше один з променів світлового пучка зміщують у просторі уздовж осі переміщення променів і один з променів світлового пучка зміщують у просторі уздовж осі, ортогональній осі переміщення променів, а апроксимацію здійснюють двовимірним поліномом [3]. Недоліками прототипу є необхідність порівняння параметрів досліджуваної поверхні з параметрами еталонної поверхні, яка має свої нерівності, через що результати таких досліджень не є беззаперечними. Наявність похибок визначення параметрів рельєфу еталонного зразка призводить до додаткових похибок у вимірюванні та обробці даних щодо параметрів рельєфу досліджуваної поверхні. До того ж принципова схема пристрою, в тому числі двоканальна схема вимірювання параметрів рельєфу досліджуваної поверхні, схема блока обробки отриманих даних є надто складними. Окремий фотоприймач для виділення опорного сигналу ускладнює оптичну схему пристрою і вносить додаткові похибки. Таким чином, задача, на рішення якої спрямована корисна модель, полягає у забезпеченні можливості визначення рельєфу будь-якої поверхні шляхом безпосередніх вимірювань її параметрів, що характеризують локальні нахили поверхні, без використання еталонних зразків, відтворення рельєфу досліджуваної поверхні, побудови її тримірного (3D) зображення. Технічний результат, який досягається при реалізації корисної моделі, що заявляється, полягає у забезпеченні надійності результатів визначення рельєфу досліджуваної поверхні завдяки безпосередньому вимірюванню її параметрів, що характеризують локальні нахили поверхні, в результаті чого зменшується час обробки отриманих даних та підвищується точність отриманих результатів. Спосіб визначення параметрів рельєфу поверхні, що забезпечує досягнення зазначеного вище технічного результату, полягає у використанні методу диференційно-фазової профілометри і/або профілографи, згідно з яким: - досліджувану поверхню сканують двома світловими пучками, що утворені завдяки почерговому розщепленню світлового пучка у кожному з двох акустооптичних дефлекторів зі зміщенням у просторі та по частоті, по двох взаємоортогональних напрямах із суміщенням за допомогою телескопічної системи Бадаля центрів сканування, причому вибрану ділянку досліджуваної поверхні сканують у кожній точці спочатку у напрямку першої осі двома світловими пучками, що розщеплені в площині першої осі, а потім у напрямку другої осі, яка ортогональна першій, двома світловими пучками, що розщеплені в площині другої осі; - параметри рельєфу досліджуваної поверхні, що характеризують її локальні нахили, вимірюють шляхом визначення фази змінної складової фотоструму, частота якої f дорівнює різниці між частотними параметрами кожного з пари скануючих світлових пучків, причому параметри кожної окремої точки досліджуваної поверхні вимірюють двічі, на початку наступного та наприкінці попереднього такту сканування, що підвищує точність та надійність результатів вимірювання; - вимірювання параметрів рельєфу досліджуваної поверхні, що характеризують її локальні нахили, завдяки постійній різниці f між частотними параметрами кожного розщепленого і відбитого променя здійснюють за одноканальною схемою, що значно спрощує електронну частину пристрою для реалізації заявленого способу. Суть способу, що заявляється, полягає у скануванні досліджуваної поверхні двома світловими пучками, що утворюють шляхом попереднього розщеплення і зміщення у просторі та по частоті світлового пучка у першому акустооптичному дефлекторі по осі першого акустооптичного дефлектора, які спрямовують до другого акустооптичного дефлектора, де їх в свою чергу розщеплюють і зміщують у просторі та по частоті по осі, ортогональній осі першого акустооптичного дефлектора, причому сканування здійснюють шляхом переміщення світлових пучків через кожну множину точок досліджуваної поверхні, що знаходяться у межах заданої 2 UA 99039 U 5 10 15 20 25 30 35 40 45 50 55 області поверхні на одній з траєкторій, орієнтованій у напрямку першої осі, та на одній із траєкторій, орієнтованій у напрямку ортогональній їй другої осі, після чого відбиті від досліджуваної поверхні світлові пучки направлять до світлоприймача, де їх перетворюють на електричні сигнали, здійснюють обробку отриманих сигналів та вимірюють параметри рельєфу досліджуваної поверхні та/або, будують її тримірне (3D) зображення. Новим у запропонованому способі є безпосереднє вимірювання параметрів рельєфу досліджуваної поверхні, що характеризують її локальні нахили, шляхом вимірювання різниці фаз між двома відбитими від досліджуваної поверхні зміщеними у просторі та по частоті світловими пучками, причому вимірювання різниці фаз в кожній точці множини точок досліджуваної поверхні здійснюють почергово, спочатку з розщепленням двох скануючих світлових пучків у напрямку першої осі, а потім у напрямку ортогональної їй другої осі, шляхом їх почергового розщеплення та зміщення у просторі та по частоті акустооптичними дефлекторами у двох взаємоортогональних напрямках з частотами, що дорівнюють частотам сканування по кожній осі з додаванням частоти зміщення, при тому, що суміщення центрів сканування здійснюють за допомогою телескопічної системи Бадаля, яку розміщують між першим та другим акустооптичними дефлекторами, вимірювання кожної окремої точки здійснюють двічі, на початку наступного та наприкінці попереднього такту сканування, а обробку відбитих від досліджуваної поверхні сигналів здійснюють за одноканальною схемою на частоті, що відповідає різниці частот скануючих світлових пучків. Все це дозволяє виключити вимірювання та порівняння параметрів еталонної поверхні з параметрами поверхні дослідження, підвищити точність та надійність результатів вимірювання і, відповідно, зменшити час обробки отриманих в результаті сканування даних. Можливість здійснення заявленої корисної моделі пояснюється наступними, де на Фіг. 1 - принципова функціональна схема пристрою; Фіг. 2 - схема першого етапу розщеплення світлового пучка і суміщення центрів сканування; Фіг. 3 - схема другого етапу розщеплення світлового пучка і суміщення центрів сканування; Фіг. 4 - як приклад, зображення імплантата кульшового суглоба та профілограма його поверхні. Спосіб визначення параметрів рельєфу поверхні, що заявляється, реалізується за допомогою пристрою, принципова функціональна схема якого представлена на Фіг. 1. Кожну точку досліджуваної поверхні послідовно сканують світловим пучком, розщепленим на, щонайменше, два параксіальних пучки. Як приклад, розглядається варіант дослідження поверхні почерговим скануванням уздовж осі OY з розщепленням світлового пучка у напрямку осі OY та уздовж осі ОХ з розщепленням світлового пучка у напрямку осі ОХ. Формування світлових пучків відбувається у два етапи згідно з представленими на Фіг. 2 і 3 схемами, де зазначені частотні параметри скануючих світлових пучків: fO - частота оптичного сигналу, f X - частота керуючого сигналу, що забезпечує сканування по осі ОХ, f Y - частота керуючого сигналу, що забезпечує сканування по осі OY, f - різниця частот керуючих сигналів, що забезпечують сканування (додаткове зміщення по частоті одного із скануючих променів). На першому етапі сигнал із складовими, що мають частоти fY , fY f , подають на перший акустооптичний дефлектор 5 (Фіг. 1), який розщеплює світловий пучок 12 на два пучки та відхиляє їх вздовж осі OY. За допомогою телескопічної системи 6 Бадаля центр розщеплення та сканування світлових пучків переносять до другого акустооптичного дефлектора 7, на який подають сигнал з частотою f X . Другий акустооптичний дефлектор 7 відхиляє отримані світлові пучки вздовж осі ОХ. Це забезпечує вимірювання різниці фаз між двома світловими пучками, що були розщеплені, у напрямку осі OY. На другому етапі сигнал з частотою f Y подають на акустооптичний дефлектор 5, який відхиляє отриманий світловий пучок вздовж осі OY. За допомогою телескопічної системи 6 Бадаля центр сканування відхиленого світлового пучка переносять до другого акустооптичного дефлектора 7, на який подають сигнал зі складовими, що мають частоти f X , f X f . Другий акустооптичний дефлектор 7 розщеплює отриманий світловий пучок на два пучки та відхиляє їх вздовж осі ОХ. Це забезпечує вимірювання різниці фаз між двома світловими пучками, що розщеплені у напрямку осі ОХ. Керування послідовністю подання сигналів до першого 5 та другого 7 акустооптичних дефлекторів з необхідними частотами щодо розщеплення світлових пучків, їх зміщення та сканування здійснюють у автоматичному режимі. Водночас частоти f X та f Y забезпечують сканування в заданих напрямках і в заданих межах. Таким чином, для розрахунків параметрів поверхні до фазового 3 UA 99039 U 5 10 15 20 25 30 35 40 детектора 27 надходять два сигнали, які відповідають параметрам рельєфу в кожній точці досліджуваної поверхні 14. Вимірювання щодо кожної досліджуваної точки відбувається двічі на початку та наприкінці кожного циклу сканування, що підвищує точність та надійність результатів вимірювання параметрів рельєфу досліджуваної поверхні 14. Відсутність необхідності використовувати еталонну поверхню з відповідними розрахунками параметрів її рельєфу спрощує та пришвидшує обробку отриманих даних. Приклад використання заявленого пристрою у біології та медицині показаний на Фіг. 4, де зображені імплантат кульшового суглобу людини для ендопротезування (зліва) та профілограма його поверхні (справа). Спосіб визначення параметрів рельєфу, що заявляється, забезпечує можливість безпосереднього вимірювання параметрів, що характеризують локальні нахили рельєфу поверхні, і побудови тримірного (3D) зображення рельєфу поверхні без використання еталонних зразків та, як результат, підвищення точності й надійності вимірювання параметрів рельєфу досліджуваної поверхні. Джерела інформації: 1. Патент України № 19905 Спосіб дослідження рельєфних та фазових об'єктів у лазерному скануючому мікроскопі та пристрій для його здійснення (перереєстроване Авторське Свідоцтво СРСР № 1734066 А1 від 30.03.1989), G02 В21/00, 25.12.1997. 2. Патент США № 5481360 А Оптичний пристрій для вимірювання форми поверхні (Optical device for measuring surface shape), G01 B11/00, 02.01.1996. 3. Патент Російської Федерації на винахід № 2179328 Спосіб диференціально-фазової профілометри та/або профілографи та пристрій для його реалізації, G02 В21/00, G01 В11/30, 19.06.2001. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб визначення параметрів рельєфу поверхні, з використанням методу диференційнофазової профілометри і/або профілографи, який відрізняється тим, що сканування досліджуваної поверхні здійснюють двома світловими пучками, що утворені завдяки почерговому розщепленню світлового пучка у кожному з двох акустооптичних дефлекторів зі зміщенням у просторі та по частоті, по двох взаємоортогональних напрямках із суміщенням центрів сканування за допомогою телескопічної системи Бадаля, що розміщена між першим та другим акустооптичними дефлекторами, причому вибрану ділянку досліджуваної поверхні сканують у кожній точці спочатку у напрямку першої осі двома світловими пучками, що розщеплені в площині першої осі, а потім у напрямку другої осі, яка ортогональна першій, двома світловими пучками, що розщеплені в площині другої осі, відбиті від досліджуваної поверхні промені спрямовують до світлоприймача, вимірювання параметрів рельєфу досліджуваної поверхні здійснюють одночасно з її скануванням шляхом визначення фази змінної складової фотоструму, частота якої f дорівнює різниці між частотними параметрами кожного з пари скануючих світлових пучків, причому параметри кожної окремої точки досліджуваної поверхні вимірюють двічі, на початку наступного та наприкінці попереднього такту сканування. 4 UA 99039 U 5 UA 99039 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюSmyrnov Yevhen Mykolaiovych, Stelmakh Oleksandr Ustymovych
Автори російськоюСмирнов Евгений Николаевич, Стельмах Александр Устимович
МПК / Мітки
МПК: G01B 11/30, G02B 21/00
Мітки: спосіб, параметрів, визначення, поверхні, об'єкта
Код посилання
<a href="https://ua.patents.su/8-99039-sposib-viznachennya-parametriv-poverkhni-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів поверхні об’єкта</a>
Спосіб визначення параметрів поверхні рогівки і ока
Номер патенту: 89321
Опубліковано: 10.04.2014
Автори: Терещенко Микола Федорович, Паткевич Ольга Іванівна, Стельмах Наталія Володимирівна, Сугак Олександр Олександрович
Мітки: ока, поверхні, параметрів, спосіб, рогівки, визначення
Формула / Реферат:
Спосіб визначення параметрів поверхні рогівки і ока, що включає, встановлення вимірювальної марки на фіксовану відстань щодо досліджуваної рогівки, реєстрацію сформованого відображення поверхнею рогівки відображення вимірювальної марки за допомогою приймача випромінювання, вимір координат точок цього зображення і аналітичний розрахунок координат точок поверхні рогівки, причому вимірюють ширину ліній зображення вимірювальної марки і...
Спосіб визначення оптичних параметрів поверхні твердих тіл
Номер патенту: 40115
Опубліковано: 16.07.2001
Автори: Завадський Сергій Миколайович, Венгер Євгеній Федорович, Буршта Ігор Іосифович
МПК: G01N 21/00
Мітки: поверхні, тіл, оптичних, твердих, параметрів, спосіб, визначення
Формула / Реферат:
Спосіб визначення оптичних параметрів поверхні твердих тіл, що включає встановлення зазору між поверхнею досліджуваного зразка і елементом порушеного повного внутрішнього відбивання, опромінення цієї поверхні р- і s-поляризованим електромагнітним випромінюванням через, елемент порушеного повного внутрішнього відбивання, вимірювання еліпсометричиих кутів y і D, і розвязування основного еліпсометричного рівняння...
Спосіб визначення часових параметрів локальних деформацій на поверхні контрольованого об’єкта

Номер патенту: 72789
Опубліковано: 27.08.2012
Автори: Войналович Олександр Володимирович, Писаренко Георгій Георгійович, Майло Андрій Миколайович
МПК: G01N 27/00
Мітки: параметрів, локальних, спосіб, контрольованого, деформацій, поверхні, визначення, часових, об'єкта
Формула / Реферат:
Спосіб визначення часових параметрів локальних деформацій на поверхні контрольованого об'єкта, під час якого до поверхні контрольованого об'єкта притискають індентор трансверсально-ізотропного пружного датчика, чутливими елементами якого є тензорезистори, розміщені на взаємно перпендикулярних плечах (пружних просторових консолях) тензометра, а у поверхневих шарах матеріалу контрольованого об'єкта ініціюють зондувальну пружну хвилю з...
Спосіб визначення параметрів поверхні обертових агрегатів
Номер патенту: 92655
Опубліковано: 25.11.2010
Автори: Шоломицький Андрій Аркадійович, Могильний Сергій Георгійович
МПК: G01B 9/00
Мітки: агрегатів, спосіб, поверхні, параметрів, визначення, обертових
Формула / Реферат:
Спосіб визначення параметрів поверхні обертових агрегатів, який включає вимірювання координат точок електронним тахеометром на поверхні діючого агрегату, який відрізняється тим, що фіксують час моменту вимірювання координат точок електронним тахеометром на поверхні діючого агрегату, а відхилення параметрів поверхні агрегату від проектних визначають з системи рівнянь:
Спосіб визначення параметрів шорсткості поверхні у процесі різання
Номер патенту: 36996
Опубліковано: 10.11.2008
Автори: Паткевич Ольга Іванівна, Усачов Петро Антонович
МПК: B23B 25/00
Мітки: визначення, параметрів, шорсткості, процесі, різання, спосіб, поверхні
Формула / Реферат:
Спосіб визначення параметрів шорсткості поверхні деталі у процесі різання на металорізальному верстаті, що включає реєстрацію сигналу акустичної емісії зони обробки і визначення по ньому значень параметрів шорсткості поверхні деталі, який відрізняється тим, що перетворюють аналоговий сигнал акустичної емісії у цифровий, визначають частоту вимірювань, дискретизують цифровий сигнал по періоду вимірів, а параметр Ra шорсткості поверхні деталі,...
Попередній патент: Система реєстрації сигналів
Наступний патент: Пристрій для визначення параметрів рельєфу поверхні
Випадковий патент: Спосіб одержання енергоємних солей деяких амінопохідних тетразолу