Гідропривод рухомої вантажної платформи
Номер патенту: 87269
Опубліковано: 27.01.2014
Автори: Сафонов Володимир Вікторович, Міщенко Володимир Олександрович, Грінберг Юрій Ісаакович
Формула / Реферат
1. Гідропривод рухомої вантажної платформи, що містить кінематично з'єднані з рухомою вантажною платформою чотири гідроциліндри підіймання і два гідроциліндри переміщення, лінію підведення робочої рідини і лінію зливу, золотникові розподільні пристрої для гідроциліндрів підіймання і гідроциліндрів переміщення, що сполучені з лінією підведення робочої рідини і лінією зливу, подільники потоку робочої рідини, що сполучені з відповідними золотниковими розподільними пристроями для гідроциліндрів підіймання і гідроциліндрів переміщення і з поршневими порожнинами відповідних гідроциліндрів, який відрізняється тим, що золотниковий розподільний пристрій для гідроциліндрів підіймання утворений чотирилінійним трипозиційним гідравлічним розподільником з електромагнітним управлінням, золотниковий розподільний пристрій для гідроциліндрів переміщення утворений чотирилінійним двопозиційним гідравлічним розподільником з електромагнітним управлінням, подільники потоку утворені системою зворотних клапанів, які утворюють випрямні мости, і пропорційними двоходовими регуляторами витрат, кожен з яких встановлений в лінії, утвореній діагоналлю відповідного випрямного моста, при цьому одна з вершин кожного випрямного моста, що не лежить на вказаній діагоналі, сполучена з відповідним гідравлічним розподільником, а протилежна їй вершина випрямного моста сполучена з поршневою порожниною відповідного гідроциліндра підйому або поршневою порожниною відповідного гідроциліндра переміщення.
2. Гідропривод за п. 1, який відрізняється тим, що гідроциліндри підіймання виконані у вигляді поршневих гідроциліндрів двосторонньої дії, що містять штокові порожнини, які сполучені з лінією зливу робочої рідини.
3. Гідропривод за п. 1 або п. 2, який відрізняється тим, що чотирилінійні трипозиційні гідравлічні розподільники з електромагнітним управлінням і чотирилінійні двопозиційні гідравлічні розподільники з електромагнітним управлінням виконані двокаскадними.
4. Гідропривод за одним з пп. 1-3, який відрізняється тим, що вершини випрямних мостів, з якими сполучені поршневі порожнини гідроциліндрів підіймання і гідроциліндрів переміщення, розміщені поблизу поршневих порожнин цих гідроциліндрів.
5. Гідропривод за одним з пп. 1-4, який відрізняється тим, що гідропривод містить електронну систему управління, що має електронний блок синхронізації з мікроконтролером, а кожен гідроциліндр підіймання і гідроциліндр переміщення забезпечений датчиком переміщення, що підключений до відповідного вхідного каналу електронного блока синхронізації, а до відповідних вихідних каналів останнього через аналогові підсилювачі підключені електромагніти пропорційних двоходових регуляторів витрат, при цьому мікроконтролер виконаний з можливістю забезпечення синхронізації роботи гідроциліндрів підйому і гідроциліндрів переміщення відповідно до заданої циклограми роботи гідроприводу.
6. Гідропривод за одним з пп. 1-5, який відрізняється тим, що він містить додатковий чотирилінійний двопозиційний гідравлічний розподільник з електромагнітним управлінням, входи якого сполучені з лінією підведення робочої рідини і лінією зливу, а вихід якого сполучений з штоковою порожниною кожного гідроциліндра переміщення двома паралельними лініями, в кожній з яких встановлений зворотний клапан, протилежно підключений зворотному клапану, встановленому в паралельній лінії.
7. Гідропривод за п. 6, який відрізняється тим, що додатковий чотирилінійний двопозиційний гідравлічний розподільник з електромагнітним управлінням виконаний двокаскадним.
Текст
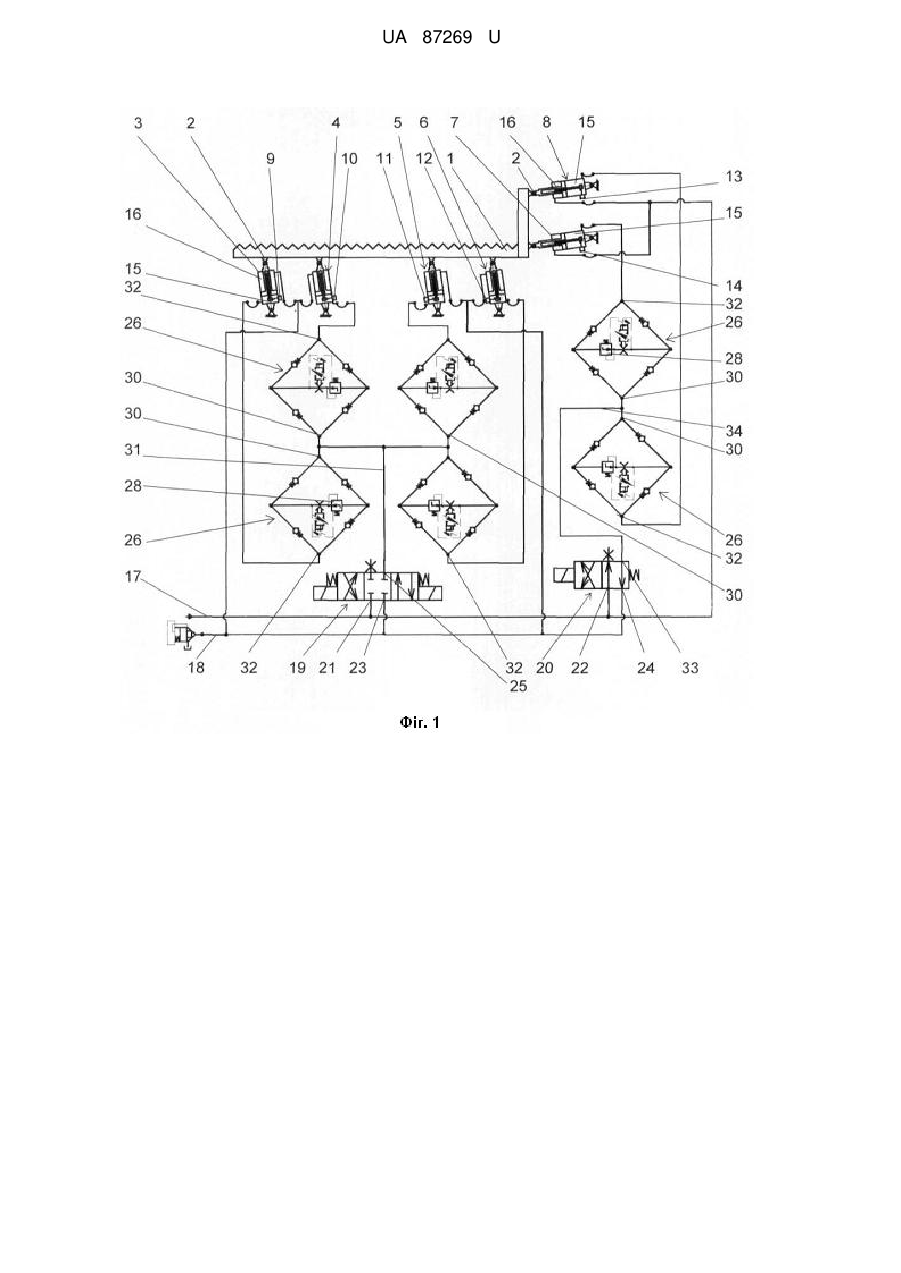
Реферат: Гідропривод рухомої вантажної платформи містить кінематично з'єднані з рухомою вантажною платформою чотири гідроциліндри підіймання і два гідроциліндри переміщення, лінію підведення робочої рідини і лінію зливу, золотникові розподільні пристрої для гідроциліндрів підіймання і гідроциліндрів переміщення, що сполучені з лінією підведення робочої рідини і лінією зливу, подільники потоку робочої рідини, що сполучені з відповідними золотниковими розподільними пристроями для гідроциліндрів підіймання і гідроциліндрів переміщення і з поршневими порожнинами відповідних гідроциліндрів. Золотниковий розподільний пристрій для гідроциліндрів підіймання утворений чотирилінійним трипозиційним гідравлічним розподільником з електромагнітним управлінням, золотниковий розподільний пристрій для гідроциліндрів переміщення утворений чотирилінійним двопозиційним гідравлічним розподільником з електромагнітним управлінням, подільники потоку утворені системою зворотних клапанів, які утворюють випрямні мости, і пропорційними двоходовими регуляторами витрат, кожен з яких встановлений в лінії, утвореній діагоналлю відповідного випрямного моста, при цьому одна з вершин кожного випрямного моста, що не лежить на вказаній діагоналі, сполучена з відповідним гідравлічним розподільником, а протилежна їй вершина випрямного моста сполучена з поршневою порожниною відповідного гідроциліндра підйому або поршневою порожниною відповідного гідроциліндра переміщення. UA 87269 U (12) UA 87269 U UA 87269 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель, що заявляється, належить до гідравлічних пристроїв рухомої вантажної платформи, призначеної для підіймання, переміщення або штовхання вантажів і може бути використана, наприклад, в конструкції гідроприводу секції холодильника кантуючого, який розташований в кінці машини безперервного лиття заготовок після розвантажувального стелажу і який призначений для охолоджування литих металевих заготовок довжиною 6, 9 і 12 м шляхом кантування їх на 90° при кожному кроці холодильника кантуючого. Відомий гідропривод рухомої платформи холодильника кантуючого [див. креслення Новокраматорського машинобудівного заводу (НКМЗ) № 1-27576413а "Холодильник кантующий", 2005], який містить насосно-акумуляторну станцію, лінію підведення робочої рідини, лінію зливу, чотири гідроциліндри підіймання та два циліндри переміщення, кожний з яких містить поршневу і штокову порожнини, золотниковий розподільний пристрій з пропорційним управлінням для гідроциліндрів підіймання та золотниковий розподільний пристрій з пропорційним управлінням для гідроциліндрів переміщення, блоки розподільних клапанів, що з'єднують через загальну лінію штокові порожнини гідроциліндрів з відповідним золотниковим розподільним пристроєм, об'ємні шестеренні подільники потоку робочої рідини для гідроциліндрів підіймання та гідроциліндрів переміщення, кожний з яких утворений встановленими на загальному валу шестеренними гідромоторами, які мають загальний вхід і роздільні виходи. Синхронізація роботи гідроциліндрів досягається за рахунок однакового робочого об'єму шестеренних гідромоторів (один вхід і 4 однакових вихідних лінії). Гідравлічний розподільник з пропорційним управлінням забезпечує регулювання величини подачі і підведення робочої рідини до об'ємного подільника потоку робочої рідини. На синхронізм роботи подільників потоку робочої рідини (масла), що утворені встановленими на спільному валу шестеренними гідромоторами впливають наступні параметри: в'язкість і температура масла; різний тиск навантаження; рівень тиску в системі. При максимальних об'ємах пропускної спроможності порушення синхронізму може досягати від ± 4 до ± 5 %. Шестеренні подільники потоку мають втрату тиску приблизною 11-12 бар. Крім відомий гідропривід є гідроприводом рухомої вантажної платформи секції холодильника кантуючого, яка здійснює переміщення в кінці машини безперервного лиття охолоджуваних литих металевих заготовок довжиною 6, 9 і 12 м і поперечним перерізом від 100 мм100 мм до 150 мм150 мм, при цьому гідроциліндри підіймання і переміщення рухомої вантажної платформи знаходяться в зоні високих температур, що значно підвищує температуру робочого масла, що використовується в гідроприводі. Таким чином робота відомого гідроприводу відбувається при різних рівнях тиску навантаження і при високих температурах оточуючого середовища. Враховуючи, що довжина трубопроводів в гідроприводі холодильника кантуючого, що з'єднують поршневі порожнини гідроциліндрів підіймання і гідроциліндрів переміщення з вихідними лініями подільників потоку сягає до двадцяти метрів, а підвід і відвід робочої рідини (масла) до/від поршневої порожнини гідроциліндра здійснюється по одному трубопроводу, внутрішній об'єм якого сягає об'єму поршневої порожнини гідроциліндра, то фактично під час роботи відомого гідроприводу в поршневі порожнини гідроциліндрів не надходить нова порція робочої рідини з лінії підведення робочої рідини, яка б забезпечувала охолодження гідроциліндрів і трубопроводу, що знаходяться в зоні високих температур холодильника кантуючого. Тобто у відомого гідроприводу має місце недостатня циркуляції масла в гідроциліндрах. Внаслідок великої температури в процесі роботи відомого гідроприводу змінюється об'єм масла і його в'язкість, що додатково впливає на синхронізм роботи гідроприводу. Недоліками описаного аналога є недостатня синхронність переміщення гідроциліндрів. Відсутність достатньої синхронності гідроциліндрів підіймання приводить до гідроударів в поршневих порожнинах випереджаючих гідроциліндрів, при цьому фактичні навантаження на деталі гідроциліндра підіймання при його зупинці на упор у верхньому положенні можуть перевищувати в 4-6 разів робочій тиск в залежності від навантаження холодильника кантуючого. Також внаслідок відсутності синхронізму аналогічні гідроудари у відомому гідроприводі можуть відбуватися при зупинці першого гідроциліндра в нижньому положенні. 1 UA 87269 U 5 10 15 20 25 30 35 40 45 50 55 Якщо циліндри переміщення нерівномірно працюватимуть, - це може привести до різкого збільшення навантаження внаслідок заклинювання, зокрема до аварії. Також є відомим гідропривод холодильника кантуючого СЗПР [див. креслення Новокраматорського машинобудівного заводу (НКМЗ) № 8-59173ГЗ, 2003 p.], який містить чотири гідроциліндри підіймання і два гідроциліндри переміщення, що призначені для переміщення рухомої вантажної платформи, з якою вони кінематично з'єднані, лінію підведення робочої рідини і лінію зливу, регулятори витрат робочої рідини, що утворені золотниковими розподільними пристроями для гідроциліндрів підіймання і гідроциліндрів переміщення, що сполучені з лінією підведення робочої рідини і лінією зливу і містять по два чотирилінійні трипозиційні розподільники з пропорційним управлінням та клапани різниці тиску і підпірні клапани, подільники потоку робочої рідини, що сполучені з відповідними золотниковими розподільними пристроями для гідроциліндрів підіймання і гідроциліндрів переміщення, і з поршневими порожнинами відповідних гідроциліндрів. подільники потоку робочої рідини для гідроциліндрів підіймання та гідроциліндрів переміщення, кожний з яких утворений встановленими на загальному валу шестеренними гідромоторами, які мають загальний вхід, що сполучений з виходом відповідного золотникового розподільного пристрою, і роздільні виходи, що сполучені з поршневими порожнинами гідроциліндрів підіймання або гідроциліндрами переміщення. Регулятори витрат робочої рідини у відомому гідроприводі розташовані перед об'ємними подільниками потоку і підключені до спільних вхідних ліній останніх. Цей відомий гідропривод також як і попередньо описаний аналог характеризується недостатнім синхронізмом роботи гідроциліндрів підіймання і гідроциліндрів переміщення, обумовленим використанням аналогічного типу подільника потоку, і має недоліки попередньо описаного аналога. Найближчим аналогом пристрою, що заявляється, вибраний гідропривод холодильника кантуючого СЗПР [див. креслення Новокраматорського машинобудівного заводу (НКМЗ) № 859173ГЗ, 2003 p.]. Спільними суттєвими ознаками найближчого аналога і гідроприводу, що заявляється, є наступна сукупність ознак: "Гідропривод рухомої вантажної платформи, що містить кінематично з'єднані з рухомою вантажною платформою чотири гідроциліндри підіймання і два гідроциліндри переміщення, лінію підведення робочої рідини і лінія зливу, золотникові розподільні пристрої для гідроциліндрів підіймання і гідроциліндрів переміщення, сполучені з лінією підведення робочої рідини і лінією зливу, подільники потоку робочої рідини, сполучені з відповідними золотниковими розподільними пристроями для гідроциліндрів підіймання і гідроциліндрів переміщення і з поршневими порожнинами відповідних гідроциліндрів". Задачею корисної моделі, що заявляється, є створення гідроприводу рухомої вантажної платформи, який завдяки використаннюв ньому запропонованої схеми виконання і з'єднання розподільних пристроїв і подільників потоку забезпечує більш синхронну роботу гідроциліндрів підіймання і гідроциліндрів переміщення рухомої вантажної платформи, що дозволяє підвищити надійність роботи гідроприводу, в тому числі при використанні його в конструкції секції холодильника кантуючого. Поставлена задача вирішується за допомогою гідроприводу рухомої вантажної платформи, що містить кінематично з'єднані з рухомою вантажною платформою чотири гідроциліндри підіймання і два гідроциліндри переміщення, лінію підведення робочої рідини і лінія зливу, золотникові розподільні пристрої для гідроциліндрів підіймання і гідроциліндрів переміщення, сполучені з лінією підведення робочої рідини і лінією зливу, подільники потоку робочої рідини, сполучені з відповідними золотниковими розподільними пристроями для гідроциліндрів підіймання і гідроциліндрів переміщення і з поршневими порожнинами відповідних гідроциліндрів, в якому, згідно з корисною моделлю, що заявляється, золотниковий розподільний пристрій для гідроциліндрів підіймання утворений чотирилінійним трипозиційним гідравлічним розподільником з електромагнітним управлінням, золотниковий розподільний пристрій для гідроциліндрів переміщення утворений чотирилінійним двопозиційним гідравлічним розподільником з електромагнітним управлінням, подільники потоку утворені системою зворотних клапанів, які утворюють випрямні мости, і пропорційними двоходовими регуляторами витрат, кожен з яких встановлений в лінії, утвореній діагоналлю відповідного випрямного моста, при цьому одна з вершин кожного випрямного моста, що не лежить на вказаній діагоналі, сполучена з відповідним гідравлічним розподільником, а протилежна їй вершина випрямного моста сполучена з поршневою порожниною відповідного гідроциліндра підіймання або поршневою порожниною відповідного гідроциліндра переміщення. 2 UA 87269 U 5 10 15 20 25 30 35 40 45 50 55 60 Використання в конструкції гідроприводу вищезазначених гідравлічних розподільників з електромагнітним управлінням і подільників потоку, утворених випрямними мостами, дозволяє досягти більш синхронної роботи гідроциліндрів гідроприводу і тим самим підвищити надійність його роботи, а також, при використанні його в холодильнику кантуючому, підвищити надійність роботи останнього. Гідроциліндри підіймання виконані як і, так і у вигляді поршневих гідроциліндрів двосторонньої дії, що містять штокові порожнини, які сполучені з лінією зливу робочої рідини. Використання гідроциліндрів двосторонньої дії спрощує налагодження роботи гідроприводу при його монтажі. Використання гідроциліндрів односторонньої дії спрощує конструкцію гідроприводу. Чотирилінійні трипозиційні гідравлічні розподільники з електромагнітним управлінням і чотирилінійні двопозиційні гідравлічні розподільники з електромагнітним управлінням виконані двокаскадними. Виконання гідравлічних розподільників двокаскадними дозволяє працювати гідроприводу при великих витратах робочої рідини. Вершини випрямних мостів, з якими сполучені поршневі порожнини гідроциліндрів підіймання і гідроциліндрів переміщення, розміщені поблизу поршневих порожнин цих гідроциліндрів. Це покращує циркуляцію робочої рідини (масла) через поршневі порожнини гідроциліндрів підіймання, так як підведення робочої рідини до поршневих порожнин гідроциліндрів і відведення її від них відбувається по різних лініях, що особливо важливо у випадку використання запропонованого гідроприводу в конструкції секції холодильника кантуючого. Гідропривод містить електронну систему управління, що має електронний блок синхронізації з мікроконтролером, а кожен гідроциліндр забезпечений датчиком переміщення, який підключений до відповідного вхідного каналу електронного блока синхронізації, а до відповідних вихідних каналів останнього через аналогові підсилювачі підключені електромагніти пропорційних двоходових регуляторів витрат, при цьому мікроконтролер виконаний з можливістю забезпечення синхронізації роботи гідроциліндрів підіймання і гідроциліндрів переміщення відповідно до заданої циклограми роботи гідроприводу. Оснащення гідроприводу електронною системою управління дозволяє на порядок покращити синхронність роботи його гідроциліндрів, а також значно збільшити надійність його роботи гідроприводу в цілому. Гідропривод може містити додатковий чотирилінійний двопозиційний гідравлічний розподільник з електромагнітним управлінням, входи якого сполучені з лінією підведення робочої рідини і лінією зливу, а вихід якого сполучений зі штоковою порожниною кожного гідроциліндра переміщення двома паралельними лініями, в кожній з яких встановлений зворотний клапан, протилежно підключений зворотному клапану, встановленому в паралельній лінії. Це дозволяє покращити циркуляцію робочої рідини (масла) через поршневі порожнини гідроциліндрів переміщення, так як підведення робочої рідини до поршневих порожнин гідроциліндрів і відведення її від них відбувається по різних лініях. Додатковий чотирилінійний двопозиційний гідравлічний розподільник з електромагнітним управлінням виконаний двокаскадним. Це забезпечує використання його в гідроприводі, який розрахований на великі витрати робочої рідини. Нижче гідропривод рухомої вантажної платформи, що заявляється, описаний більш детально з посиланням на креслення, що додаються, на прикладі його використання в гідроприводі рухомої вантажної платформи секції холодильника кантуючого, призначеного для використання в машинах безперервного лиття заготовок. На кресленнях зображено: Фіг. 1 - гідравлічна схема запропонованого гідроприводу рухомої вантажної платформи, що може бути використана при незначних витратах робочої рідини в гідроприводі; Фіг. 2 - гідравлічна схема випрямного моста, що містить пропорційний двопозиційний регулятор витрат; Фіг. 3 - гідравлічна схема запропонованого гідроприводу рухомої вантажної платформи, в якій використані гідроциліндри підіймання односторонньої дії; Фіг. 4 - гідравлічна схема запропонованого гідроприводу рухомої вантажної платформи, що призначена для використання при значних витратах робочої рідини в гідроприводі; Фіг. 5 - інше виконання правої частини гідравлічних схем, зображених на Фіг. 1-3; Фіг. 6 - структурна електронна схема управління гідроприводом; 3 UA 87269 U 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 7 - циклограма роботи гідроприводу рухомої вантажної платформи секції холодильника кантуючого за період часу Т. Гідропривод, що заявляється, містить рухому вантажну платформу 1, з якою кінематично з'єднані, наприклад, за допомогою шарнірів 2, чотири гідроциліндри підіймання 3, 4, 5, 6 і два гідроциліндри переміщення 7, 8 (див. Фіг. 1, 2, 3 і 4). Гідроциліндри 3, 4, 5, 6, 7 і 8 забезпечені датчиками переміщення гідроциліндрів 9, 10, 11, 12 та 13, 14, відповідно. Кожний з гідроциліндрів підіймання 3, 4, 5 і 6, зображений на Фіг. 1, 2 і 4, та усі гідроциліндри переміщення 7, 8 є гідроциліндрами двосторонньої дії, що містить поршневу порожнину 15 і штокову порожнину 16. Гідроциліндри підіймання 3, 4, 5 і 6, що зображені на Фіг. 3, є плунжерними гідроциліндрами, що належать до гідроциліндрів односторонньої дії, які містять лише поршневі порожнини 15. Гідропривід також містить лінію 17 підведення робочої рідини (лінія нагнітання) і лінія 18 зливу, а також чотирилінійний трипозиційний гідравлічний розподільник 19 з електромагнітним управлінням, що виконує функцію золотникового розподільного пристрою для гідроциліндрів підіймання 3, 4, 5 і 6, та чотирилінійного двопозиційного гідравлічного розподільника 20 з електромагнітним управлінням, що виконує функцію золотникового розподільного пристрою для гідроциліндрів переміщення 7 і 8. Штокові порожнини 16 гідроциліндрів двосторонньої дії з'єднані з лінією 18 зливу. Вхід 21 чотирилінійного трипозиційного гідравлічного розподільника 19 та вхід 22 чотирилінійного двопозиційного гідравлічного розподільника 20 з'єднані з лінією 17 підведення робочої рідини, а вхід 23 чотирилінійного трипозиційного гідравлічного розподільника 21 та вхід 24 чотирилінійного двопозиційного гідравлічного розподільника 20 з'єднані з лінією 18 зливу. Поршнева порожнина 15 кожного з чотирьох гідроциліндрів підіймання 3, 4, 5, 6 з'єднана з вихідним каналом 25 чотирилінійного трипозиційного гідравлічного розподільника 21 через окремий, один із чотирьох випрямних мостів 26 (див. Фіг. 1 і Фіг. 2), кожний з яких утворений системою зворотних клапанів 27 і пропорційним двоходовим регулятором витрат 28, який встановлений в лінії, що утворена однією діагоналлю 29 випрямного моста. При цьому, одна вершина 30 кожного випрямного моста 26, та що не лежить на його діагоналі 29, сполучена через спільну лінію 31 з вихідним каналом 25 чотирилінійного трипозиційного гідравлічного розподільника 19, а друга вершина 32 кожного випрямного моста 26, що протилежна вершині 30 і також не лежить на діагоналі 29, сполучена з поршневою порожниною 15 відповідного гідроциліндра підіймання 3, 4, 5, 6. Завдяки з'єднанню чотирьох випрямних мостів 28 з встановленими в них чотирма пропорційними двоходовими регуляторами витрат 30 з одним вихідним каналом чотирилінійного трипозиційного гідравлічним розподільником 21 і з чотирма поршневими порожнинами 15 гідроциліндрів підіймання 2, 3, 4, 5 ці чотири випрямні мости 28 разом з чотирма регуляторами витрат 30 утворюють подільник потоку для гідроциліндрів підіймання. Поршнева порожнина 15 кожного з двох гідроциліндрів переміщення 7, 8 з'єднана з вихідним каналом 33 чотирилінійного двопозиційного гідравлічного розподільника 20 через подільник потоку для гідроциліндрів переміщення, який на відміну від подільника потоку для гідроциліндрів підіймання утворений двома, а не чотирма, випрямними мостами 26 (Фіг. 2) з встановленими в них двома пропорційними двоходовими регуляторами витрат 28 (див. праву частину гідравлічних схем, зображених на Фіг 1-3, а також Фіг. 4). При цьому вершина 32 кожного з цих двох випрямних мостів сполучена через спільну лінію 34 з вихідним каналом 33 чотирилінійного двопозиційного гідравлічного розподільника 22, а вершина 32 сполучена з поршневою порожниною 15 відповідного гідроциліндра переміщення 7, 8. На Фіг. 2 суцільними стрілками 35 показаний напрямок проходження робочої рідини через випрямний міст 28 при сполученні його вершини 32 через гідравлічний розподільник 21 або 24 з лінією 17 підведення робочої рідини, а штрихованими стрілками 36 показаний напрямок проходження робочої рідини при сполученні вершини 31 випрямного моста 28 з лінією 18 зливу. Фіг. 2 пояснює схему з'єднання зворотних клапанів 29 і пропорційного двоходового регулятора витрат 28 всередині випрямного моста 26. На гідравлічних схемах, зображених на Фіг. 3 і 4, вершини 32 випрямних мостів з якими сполучені поршневі порожнини 15 гідроциліндрів підіймання 3, 4, 5, 6 та поршневі порожнини гідроциліндрів переміщення 7 і 8, розміщені поблизу поршневих порожнин 15 цих гідроциліндрів. В гідравлічній схемі, зображеній на Фіг. 4, чотирилінійний трипозиційний гідравлічний розподільник 21 і чотирилінійний двопозиційний гідравлічний розподільник 22 виконані двоступінчатими. При цьому, гідравлічний розподільник 21 містить додатково ступінь 37, а гідравлічний розподільник 22 - додатково ступінь 38. Додаткові ступені 37 і 38 служать для 4 UA 87269 U 5 10 15 20 25 30 35 40 45 50 55 60 управління основними гідравлічними розподільниками 21 і 22, відповідно, які в цьому випадку призначені для використання при значних витратах робочої рідини. На Фіг. 5 показано дещо інше виконання правої частина гідравлічної схеми запропонованого гідроприводу, що стосується особливостей підключення гідроциліндрів переміщення 7 і 8 до лінії 17 підведення робочої рідини і лінії 18 зливу. При цьому гідропривод містить додатковий чотирилінійний двопозиційний гідравлічний розподільник 39 з електромагнітним управлінням, який виконаний двокаскадним і містить додаткову ступінь 40. Входи 41, 42 розподільника 39 сполучені відповідно з лінією 17 підведення робочої рідини і лінією 18 зливу, а його вихід 43 сполучений зі штоковою порожниною 15 кожного гідроциліндра переміщення 7, 8 двома паралельними лініями 44, 45, в яких встановлені зворотні клапани 46 і 47 відповідно. Зворотний клапан 46, протилежно підключений зворотному клапану 45, встановленому в паралельній лінії. На Фіг. 6 показана структурна схема електронної системи управління запропонованого гідроприводу, що містить електронний блок синхронізації (контролер) 48 з мікроконтролером 49, який виконаний з можливістю забезпечення синхронізації роботи гідроциліндрів підйому і гідроциліндрів переміщення відповідно до заданої циклограми роботи гідроприводу. До входів електронного блока синхронізації 47, що позначені жирними стрілками 50, спрямованими до блока синхронізації 47, підключені: датчики переміщення 9, 10, 11, 12 гідроциліндрів підіймання, та датчики переміщення 13, 14 гідроциліндрів переміщення. До виходів електронного блока синхронізації 47, що позначені жирними стрілками 51, що спрямовані назовні від блока синхронізації, через окремі аналогові підсилювачі 52 підключені: електромагніти 53 і 54 одно або двокаскадного чотирилінійного трипозиційного гідравлічного розподільника 19 (в залежності від гідравлічної схеми: Фіг. 1, 3 або Фіг. 4), електромагніт 55 одно або двокаскадного чотирилінійного двопозиційного гідравлічного розподільника 20 (в залежності від гідравлічної схеми: Фіг. 1, 3 або Фіг. 4), електромагніт 56 чотирилінійного двопозиційного гідравлічного розподільника 39 (Фіг. 5). електромагніти пропорційної дії 57, 58, 59, 60 пропорційних двоходових регуляторів витрат 28, що встановлені в діагоналях 29 відповідних випрямних мостів 26, які з'єднують вихідний канал 25 гідравлічного розподільника 19 з поршневими порожнинами 15 відповідних гідроциліндрів підіймання 3, 4, 5, 6 (див. Фіг. 1, 2 або 3), електромагніти пропорційної дії 61, 62 пропорційних двоходових регуляторів витрат 28, що встановлені у відповідні випрямні мости 26, які з'єднують вихідний канал 33 гідравлічного розподільника 20 зі штоковими порожнинами 15 гідроциліндрів переміщення 7, 8 (див. Фіг. 5). На Фіг. 7 зображена циклограма роботи гідроприводу рухомої вантажної платформи секції холодильника кантуючого. Циклогама містить одну горизонтальну координату - координату часу t1 (секунд) і дві вертикальні координати - координату витрат робочої рідини Q (л/хв.) та координату переміщення S (мм). Усі три координати беруть початок в точці 0. Циклограма містить наступні графіки, які зображені ломаними лініями і позначені арабськими числами. Лінія І - графік зміни в часі величини витрати Q робочої рідини, що подається до чотирьох циліндрів підіймання 3, 4, 5, 6 на проміжку часу t-t, що дорівнює часу технологічного вертикального переміщення (ходу) вгору (підіймання) на величину Sверт. вантажної платформи 1 з нижнього вихідного положення (точка 0 - позначає початок координати вертикального переміщення S, мм). Лінія II - графік зміни в часі витрати Q робочої рідини, що подається до двох циліндрів переміщення 7, 8 на проміжку часу t2, що дорівнює часу технологічного горизонтального переміщення (ходу) уперед вантажної платформи на величину Sверт. з вихідного горизонтального положення (точка 0 - також позначає початок координати горизонтального переміщення S, мм) - горизонтального переміщення уперед. Лінія III - графік зміни в часі витрати Q робочої рідини, що подається до чотирьох циліндрів підіймання 3, 4, 5, 6 на проміжку часу t3, що дорівнює часу вертикального переміщення (ходу) вниз (опускання) на величину Sверт. вантажної платформи 1 з верхнього піднятого положення до нижнього вихідного положення (точка 0). Лінія IV - графік зміни в часі витрати Q робочої рідини, що подається до двох циліндрів переміщення 7, 8 на проміжку часу t4, що дорівнює часу технологічного горизонтального переміщення (ходу) назад на величину Sверт вантажної платформи 1 з висунутого положення до її вихідного горизонтального положення (точка 0). Лінія V - графік зміни в часі величини (S) вертикального положення вантажної платформи 1. 5 UA 87269 U Лінія VI - графік зміни в часі величини (S) горизонтального положення вантажної платформи 1. 5 10 15 20 25 30 35 40 45 50 55 60 Далі буде описана робота гідроприводу з посиланням на Фіг. 1-4 та 6-7 креслень на прикладі роботи гідроприводу рухомої вантажної платформи секції холодильника кантуючого. Напрямок руху вантажної платформи 1 секції визначається положеннями чотирилінійного трипозиційного гідравлічного розподільника 19 з електромагнітним управлінням та чотирилінійного двопозиційного гідравлічного розподільника 20 з електромагнітним управлінням. Управління положеннями розподільниками 19, 20 і регуляторами витрат 28 здійснюється за допомогою електронного блока синхронізації (контролер) 48, мікроконтролер 49 якого містить записану програму, що забезпечує роботу гідроприводу у відповідності з необхідною циклограмою роботи, що забезпечує переміщення рухомої вантажної платформи 1 секції холодильника кантуючого у відповідності с заданим технологічним циклом. Управління роботою гідроприводу відбувається із забезпеченням синхронної роботи як гідроциліндрів підіймання 3, 4, 5, 6, так і гідроциліндрів переміщення, використанням зворотного зв'язку, що забезпечується датчиками 9, 10, 11, 12 та 13, 14 переміщення гідроциліндрів, завдяки чому забезпечується зворотний зв'язок в управлінні гідроприводом. На доданих кресленнях гідравлічні розподільники 19, 20 і 21 займають вихідні положення, при якому гідроциліндри 3, 4, 5, 6 і 7, 8 відокремлені від лінії 17 подавання робочої рідини. Після видачі команди "пуск" електронний блок синхронізації 48 забезпечує подачу електричної напруги на електромагніт 54 (Фіг. 6) гідравлічного розподільника 19, внаслідок чого канали 21, 25 розподільника сполучаються і лінія 31 з'єднується з лінією 17. Робоча рідина, що надходить з лінії 17 в лінію 31, далі через чотири випрямні мости 26 надходить до поршневих порожнин 15 гідроциліндрів підіймання 3, 4, 5, 6 (Фіг. 3). При цьому переміщення робочої рідини через випрямні мости 26 відбувається в напрямку стрілок 35 (Фіг. 2). При надходженні робочої рідини в поршневі порожнини 15, гідроциліндри 3, 4, 5, 6 починають підіймати платформу 1. При цьому електронний блок синхронізації 48 забезпечує досягнення величини витрат робочої рідини, що надходить до кожної поршневої порожнини 15 гідроциліндрів підіймання, у відповідності з графіком, зображеним лінією І на Фіг. 7 шляхом управління роботою пропорційних двоходових регуляторів витрат 28, які встановлені в лініях, що утворені діагоналями 29 випрямних мостів 26. Це керування забезпечується зміною електричної напруги, що надходить від електронного блока синхронізації 48 на електромагніти пропорційної дії 57, 58, 59, 60 пропорційних двоходових регуляторів витрат 28, що встановлені у випрямних мостах 26, з'єднаних з гідроциліндрами підіймання. Під час підіймання платформи 1 за проміжок часу t1 змінюється величина витрат Q робочої рідини. На ділянках "0а" і "de" величина витрат Q зростає, на ділянках "ab" і cf" її величина дорівнює Qном, на ділянках "be" і "fg" вона спадає, а на ділянці "cd" вона має проміжне мінімальне значення (Фіг. 7). Завдяки чому вертикальне переміщення платформи 1 починається з повільного розгону (ділянка "0А" на графіку, позначеному лінією І) і закінчується гальмуванням (ділянка "ВС" на графіку, позначеному лінією І) при підійманні платформи 1 на величину S верт. При закінченні вертикального підіймання платформи 1 на задану величину підйому Sверт. електронна система управління переводить гідравлічний розподільник 19 у нейтральне положення, внаслідок чого, платформа 1 утримується у піднятому положенні (ділянка "CD" на лінії V). Одночасно електронна система управління за допомогою електромагніта 55 перемикає гідравлічний розподільник 20 у положення, в якому його вхідний канал 22, сполучений з лінією 17, перебуває з'єднаному положенні з його вихідним каналом 33. Внаслідок чого робоча рідина з лінії 17 надходить у лінію 34 і далі через випрямні мости 26 надходить в поршневі порожнини гідроциліндрів переміщення 7 і 8, які здійснюють горизонтальне переміщення вперед платформи 1 на величину Sгор., яке відбувається за рахунок різності площин поперечного перетину поршневої і штокової порожнин гідроциліндрів переміщення 7, 8. При горизонтальному переміщенні вперед платформи 1 на величину Sгор електронна система управління забезпечує зміну в проміжок часу t2 величина витрат Q робочої рідини, що надходить до поршневих порожнин 15 гідроциліндрів переміщення 7, 8 у відповідності з графіком, позначеним лінією II на Фіг. 7. На ділянці "hi" витрата Q зростає від нуля до Qном, а на ділянці "jk" вона спадає від Qном. до нульового значення. Внаслідок чого горизонтальне переміщення платформи 1 починається з повільного розгону (ділянка "НІ" на лінії VI на Фіг. 7) і закінчується гальмуванням (ділянка "JK" на лінії VI на Фіг. 7). При закінченні горизонтального переміщення вперед платформи 1 на задану величину Sгор електронна система управління перемикає гідравлічний розподільник 20, який роз'єднує порожнини 15 гідроциліндрів переміщення 7 і 8 від лінії 17 подавання робочої рідини. При цьому платформа 1 залишається висунутою вперед на величину Sгор. 6 UA 87269 U 5 10 15 20 25 30 35 40 45 50 55 60 Одночасно електронна система управління за допомогою електромагніта 53 перемикає гідравлічний розподільник 19 у положення, при якому його вихідний канал 25 сполучається з його вхідним каналом 23, з'єднаним з лінією 18 зливу. Внаслідок чого під дією ваги платформи 1 відбувається витискання робочої рідини з поршневих порожнин 15 гідроциліндрів підіймання 3, 4, 5, 6 на злив у лінію 18 через випрямні мости 26, лінію 31 і канали 25 і 23 гідравлічного розподільника 19. Управління опусканням платформи 1 здійснюється електронною системою управління, яка змінює величину електричної напруги на електромагнітах пропорційної дії 57, 58, 59, 60 пропорційних двоходових регуляторів витрат 28, які встановлені у випрямних мостах 26 таким чином, що витрата Q робочої рідини, яка надходить з поршневих порожнин 15 гідроциліндрів 3, 4, 5, 6 на злив під час опускання платформи 1 за проміжок часу t3 змінюється за графіком, зображеним лінією III на Фіг. 7. При опусканні платформи 1 за проміжок часу t1 змінюється величина витрат Q робочої рідини. На ділянках "lm" і "рr" величина витрат Q зростає, на ділянках "mn" і "rs" її величина дорівнює Qном, на ділянках "nо" і "sG" вона спадає, а на ділянці "ор" вона має проміжне мінімальне значення (Фіг. 7). Завдяки чому вертикальне переміщення платформи 1 починається з повільного розгону (ділянка "DE" на графіку, позначеному лінією І) і закінчується гальмуванням (ділянка "FG" на графіку, позначеному лінією V) при опусканні вантажної платформи 1 на величину Sверт. Після опускання платформи 1 у вихіднепочаткове положення електронна система управління переводить гідравлічний розподільник 19 у нейтральне положення, внаслідок чого, платформа 1 утримується в нижньому опущенному на рівні початкового нульового вертикального положення. Після опускання вантажної платформи 1 у початкове вертикальне положення електронна система управління вимикає живлення електромагніта 55 гідравлічного розподільника 20 і він повертається у вихідне положення, у якому його вихідний канал 33 сполучений з лінією зливу 18 через вхідний канал 24. Внаслідок перепаду тиску між поршневими порожнинами 15 і штоковими порожнинами 16 відбувається зворотний хід гідроциліндрів переміщення 7 і 8. При цьому електронна система управління здійснює регулювання величини витрат Q робочої рідини, що надходить на злив від поршневих порожнин 15 гідроциліндрів переміщення 7, 8 відповідно графіку, позначеного ломаною лінією IV на Фіг. 7. Управління здійснюється за шляхом зміни напруги, що надходить від електронного блока синхронізації 48 до електромагнітів пропорційної дії 61, 62 пропорційних двоходових регуляторів витрат 28, що встановлені у випрямні мости 26, які з'єднують вихідний канал 33 гідравлічного розподільника 20 з поршневими порожнинами 15 гідроциліндрів переміщення 7, 8. При цьому витрата Q робочої рідини на проміжку часу t3 горизонтального переміщення назад платформи спочатку зростають від нульового значення до Qном. (ділянка "Gu" на лінії IV), потім утримується на рівні Qном. (ділянка "uv" на лінії IV), а потім спадає до нульового значення (ділянка "vO" на лінії IV). Внаслідок такого управління витратою Q робочої рідини на проміжку часу t3 горизонтальне переміщення назад вантажної платформи 1 починається з прискорення (ділянка "LM" на лінії "VI") і перед кінцем цього переміщення гальмується (ділянка "NO" на лінії "VI"). У випадку виконання правої частини схеми гідроприводу відповідно Фіг. 5 робота такого гідроприводу буде в основному відбуватися аналогічно описаній вище для гідравлічних схем за Фіг. 1-4. Робота гідроприводу, штокові порожнини 16 гідроциліндрів якого з'єднані двома лініями 44, 45, в яких встановлені зворотні клапани 46, 47 з вихідним каналом 43 додаткового двокаскадного чотирилінійного двопозиційного гідравлічного розподільника 39, вхідні канали якого 41 і 42 з'єднані відповідно з лінією 17 підведення робочої рідини і лінією 18 зливу буде відбуватись відповідно циклограмі роботи, зображеній на Фіг. 7. Відмінність роботи гідроприводу, що заявляється, з використанням також схеми з'єднання гідроциліндрів переміщення 7, 8 з лінями 17 і 18, полягає в тому, що підведення і відведення робочої рідини до/від штокових порожнин 16 гідроциліндрів 7, 8 відбувається не через одну, як на гідравлічних схемах за Фіг. 1, 3 і 4, а через дві різні лінії, відповідно 47 і 46. При горизонтальному переміщенні вперед платформи 1 робоча рідина зі штокових порожнин 16 гідроциліндрів 7 і 8 через лінію 44 зі зворотним клапаном 47 і канали 43 і 42 додаткового гідравлічного розподільника 39 витісняється в лінію зливу 18. Після опускання платформи 1 у початкове горизонтальне положення електронна система управління за допомогою електромагніта 56 (Фіг. 6) перемикає гідравлічний розподільник 39 у положення, при якому його вхідний канал 42 (Фіг. 5), що з'єднаний з лінією 17, сполучається з його вихідним каналом 33, і робоча рідина з лінії 17 через канали 41 і 43 гідравлічного 7 UA 87269 U 5 10 розподільника 39 надходить через зворотний клапан 45 у лінію 44 до штокових порожнин 16 гідроциліндрів переміщення 8, 9. При цьому поршневі порожнини 15 гідроциліндрів 7 і 8 з'єднані з лінією зливу 18 через відповідні випрямні мости 26, лінію 34 і з'єднані між собою канали 33 і 24 гідравлічного розподільника 20. Внаслідок перепаду тиску між штоковими порожнинами 16 гідроциліндрів 7, 8 і їх поршневими порожнинами 15, що з'єднані з лінією зливу 18 через випрямні мости 26, лінію 34 і канали 33 і 24 гідравлічного розподільника, відбувається зворотний хід гідроциліндрів 7, 8. Електронна системи управління здійснює управління положенням гідравлічного розподільника 39 за допомогою електромагніта 56 чотирилінійного двопозиційного гідравлічного розподільника 39. Після завершення горизонтального переміщення назад у вихідне положення платформи 1, що відповідає точці "О" на координаті часу t, цикл роботи гідроприводу повторюється. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 40 45 50 55 1. Гідропривод рухомої вантажної платформи, що містить кінематично з'єднані з рухомою вантажною платформою чотири гідроциліндри підіймання і два гідроциліндри переміщення, лінію підведення робочої рідини і лінію зливу, золотникові розподільні пристрої для гідроциліндрів підіймання і гідроциліндрів переміщення, що сполучені з лінією підведення робочої рідини і лінією зливу, подільники потоку робочої рідини, що сполучені з відповідними золотниковими розподільними пристроями для гідроциліндрів підіймання і гідроциліндрів переміщення і з поршневими порожнинами відповідних гідроциліндрів, який відрізняється тим, що золотниковий розподільний пристрій для гідроциліндрів підіймання утворений чотирилінійним трипозиційним гідравлічним розподільником з електромагнітним управлінням, золотниковий розподільний пристрій для гідроциліндрів переміщення утворений чотирилінійним двопозиційним гідравлічним розподільником з електромагнітним управлінням, подільники потоку утворені системою зворотних клапанів, які утворюють випрямні мости, і пропорційними двоходовими регуляторами витрат, кожен з яких встановлений в лінії, утвореній діагоналлю відповідного випрямного моста, при цьому одна з вершин кожного випрямного моста, що не лежить на вказаній діагоналі, сполучена з відповідним гідравлічним розподільником, а протилежна їй вершина випрямного моста сполучена з поршневою порожниною відповідного гідроциліндра підйому або поршневою порожниною відповідного гідроциліндра переміщення. 2. Гідропривод за п. 1, який відрізняється тим, що гідроциліндри підіймання виконані у вигляді поршневих гідроциліндрів двосторонньої дії, що містять штокові порожнини, які сполучені з лінією зливу робочої рідини. 3. Гідропривод за п. 1 або п. 2, який відрізняється тим, що чотирилінійні трипозиційні гідравлічні розподільники з електромагнітним управлінням і чотирилінійні двопозиційні гідравлічні розподільники з електромагнітним управлінням виконані двокаскадними. 4. Гідропривод за одним з пп. 1-3, який відрізняється тим, що вершини випрямних мостів, з якими сполучені поршневі порожнини гідроциліндрів підіймання і гідроциліндрів переміщення, розміщені поблизу поршневих порожнин цих гідроциліндрів. 5. Гідропривод за одним з пп. 1-4, який відрізняється тим, що гідропривод містить електронну систему управління, що має електронний блок синхронізації з мікроконтролером, а кожен гідроциліндр підіймання і гідроциліндр переміщення забезпечений датчиком переміщення, що підключений до відповідного вхідного каналу електронного блока синхронізації, а до відповідних вихідних каналів останнього через аналогові підсилювачі підключені електромагніти пропорційних двоходових регуляторів витрат, при цьому мікроконтролер виконаний з можливістю забезпечення синхронізації роботи гідроциліндрів підйому і гідроциліндрів переміщення відповідно до заданої циклограми роботи гідроприводу. 6. Гідропривод за одним з пп. 1-5, який відрізняється тим, що він містить додатковий чотирилінійний двопозиційний гідравлічний розподільник з електромагнітним управлінням, входи якого сполучені з лінією підведення робочої рідини і лінією зливу, а вихід якого сполучений з штоковою порожниною кожного гідроциліндра переміщення двома паралельними лініями, в кожній з яких встановлений зворотний клапан, протилежно підключений зворотному клапану, встановленому в паралельній лінії. 7. Гідропривод за п. 6, який відрізняється тим, що додатковий чотирилінійний двопозиційний гідравлічний розподільник з електромагнітним управлінням виконаний двокаскадним. 8 UA 87269 U 9 UA 87269 U 10 UA 87269 U 11 UA 87269 U 12 UA 87269 U 13 UA 87269 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 14
ДивитисяДодаткова інформація
Автори англійськоюHrinberg Yurii Isaakovych, Mischenko Volodymyr Oleksandrovych
Автори російськоюГринберг Юрий Исаакович, Мищенко Владимир Александрович
МПК / Мітки
МПК: B66F 7/00
Мітки: рухомої, вантажної, гідропривод, платформи
Код посилання
<a href="https://ua.patents.su/16-87269-gidroprivod-rukhomo-vantazhno-platformi.html" target="_blank" rel="follow" title="База патентів України">Гідропривод рухомої вантажної платформи</a>
Універсальна конструкція залізничної вантажної платформи
Номер патенту: 16868
Опубліковано: 15.08.2006
Автори: Масліков Юрій Валентинович, Момот Сергій Іванович, Гончаренко Ігор Владиславович
МПК: B61D 3/00
Мітки: конструкція, універсальна, вантажної, платформи, залізничної
Формула / Реферат:
Універсальна конструкція залізничної вантажної платформи, яка відрізняється тим, що додатково обладнана торцевими упорами з можливістю перестановки і фіксації в залежності від розмірів вантажу.
Трансформоване накриття вантажної платформи автомобіля-пікапа
Номер патенту: 47843
Опубліковано: 25.02.2010
Автори: Копитко Володимир Михайлович, Максимюк Наталія Ігорівна, Зачек Олег Ігорович, Керницький Іван Степанович, Керницький Назар Іванович
Мітки: вантажної, автомобіля-пікапа, накриття, трансформоване, платформи
Формула / Реферат:
1. Трансформоване накриття вантажної платформи автомобіля-пікапа, подібно до відомого накриття кузова автомобіля, що містить полімерний або металевий тонкостінний корпус із задньою рухомою кришкою і призначене для монтажу на вантажній платформі кузова автомобіля-пікапа, яке відрізняється тим, що дах накриття виконаний у вигляді шарнірно закріпленої до бортів кузова двостулкової кришки, стулки якої можуть опускатися і фіксуватися.2....
Важільно-шарнірний механізм кріплення вантажної платформи до несучої системи (рами), який стабілізує положення автомобіля
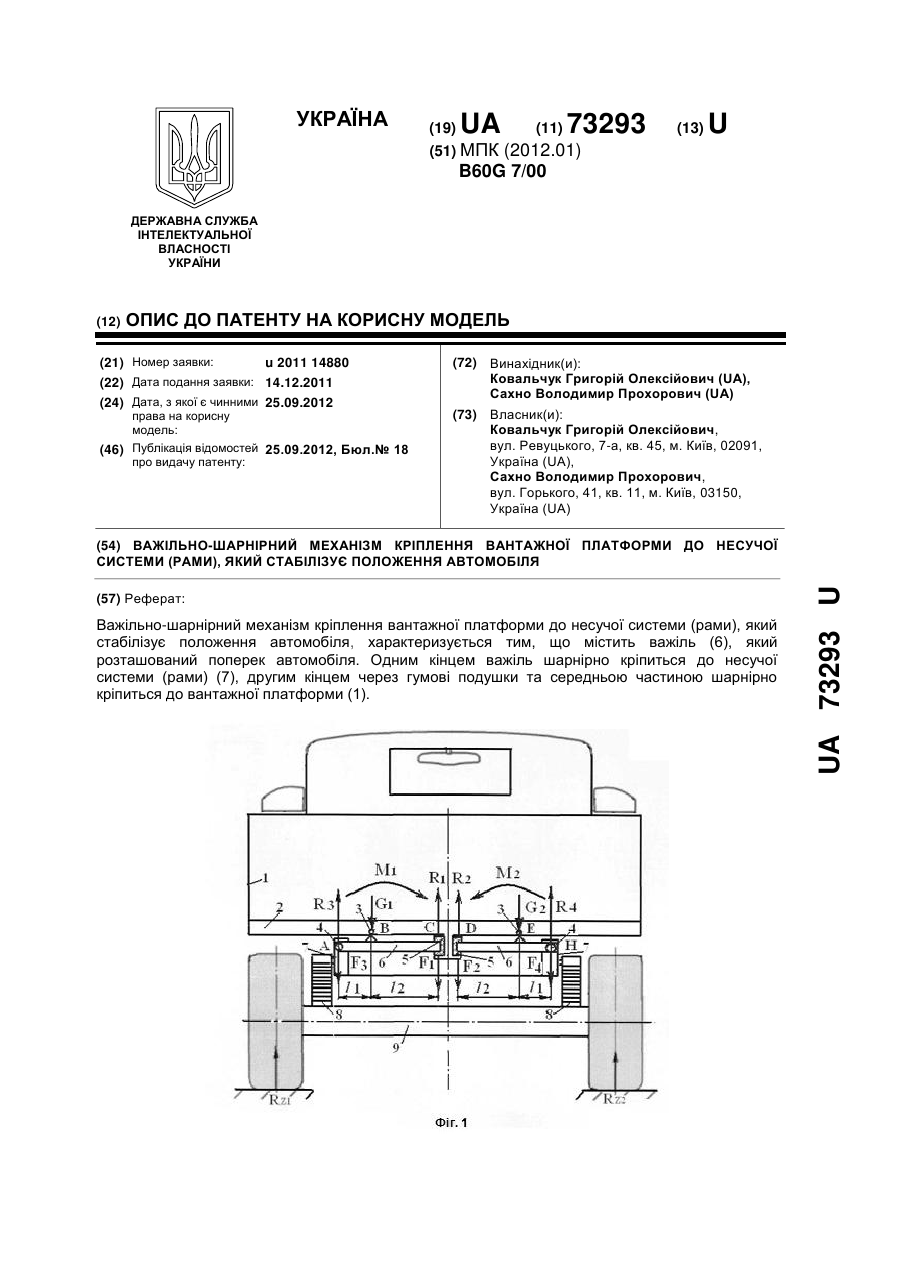
Номер патенту: 73293
Опубліковано: 25.09.2012
Автори: Ковальчук Григорій Олексійович, Сахно Володимир Прохорович
МПК: B60G 7/00
Мітки: автомобіля, важільно-шарнірний, рами, системі, положення, механізм, несучої, стабілізує, кріплення, платформи, вантажної
Формула / Реферат:
Важільно-шарнірний механізм кріплення вантажної платформи до несучої системи (рами), що стабілізує положення автомобіля, який характеризується тим, що містить важіль (6), який розташований поперек автомобіля і одним кінцем шарнірно кріпиться до несучої системи (рами) (7), другим кінцем через гумові подушки та середньою частиною шарнірно кріпиться до вантажної платформи (1).
Тент вантажної платформи транспортного засобу
Номер патенту: 16422
Опубліковано: 29.08.1997
Автори: Бубирь Едуард Георгійович, Жуковець Тетяна Єрмолаівна, Жуковець Іван Пантелійович, Полетун Леонід Юхимович
МПК: B60P 7/00
Мітки: вантажної, платформи, тент, транспортного, засобу
Формула / Реферат:
1. Тент грузовой платформы транспортного средства по авт.св. № 1154127, отличающийся тем, что, с целью улучшения условий эксплуатации, каждая из строповочных проушин, смонтированных на аркообразных секциях, выполнена из упругогибкогостержня, концы которого жестко закреплены на соответствующей секции, а плоскость размещения проушины расположена под углом к крыше тента.2. Тент по п.1, отличающийся тем, что часть упруго...
Тент вантажної платформи транспортного засобу
Номер патенту: 16428
Опубліковано: 29.08.1997
Автори: Полетун Леонід Юхимович, Бубирь Едуард Георгійович, Жуковець Іван Пантелійович
МПК: B60P 7/00
Мітки: засобу, транспортного, тент, вантажної, платформи
Формула / Реферат:
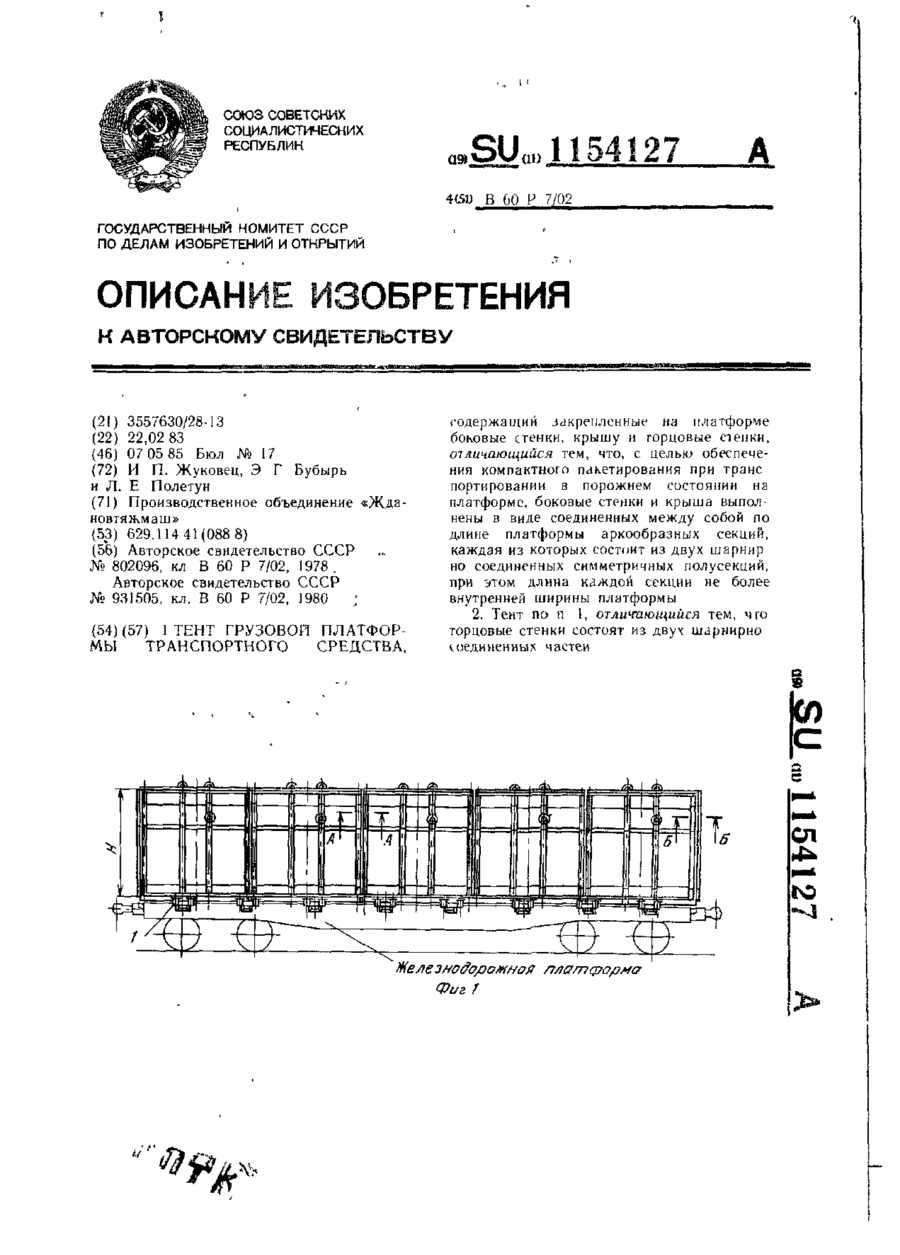
1. Тент грузовой платформы транспортного средства, содержащий закрепленные на платформе боковые стенки, крыту и торцовые стенки, отличающийся тем, что, с целью обеспечения компактного пакетирования при транспортировании в порожнем состоянии на платформе, боковые стенки и крыша выполнены в виде соединенных между собой по длине платформы аркообразных секций, каждая из которых состоит из двух шарнирно соединенных симметричных полусекций, при...
Попередній патент: Спосіб одержання плодово-ягідного десерту “вік здоров’я”
Наступний патент: Меч для посадки лісових культур т-1
Випадковий патент: Спосіб кріплення гуми до металу методом вулканізації