Лінійний індукторний двигун
Формула / Реферат
Линейный индукторный двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг, отличающийся тем, что подвижный элемент выполнен из трех электромагнитных модулей, первый модуль смещен относительно второго вдоль направления движения на—(п + 1/3)т, а третий относительно второго —на + (п + 1 /З)t, П-образные магнитопроводы в каждом электромагнитном модуле смещены относительно друг друга вдоль направления движенияна (n ± І/б) t, где t —шаг зубцовой зоны двигателя, п — целое число.
Текст
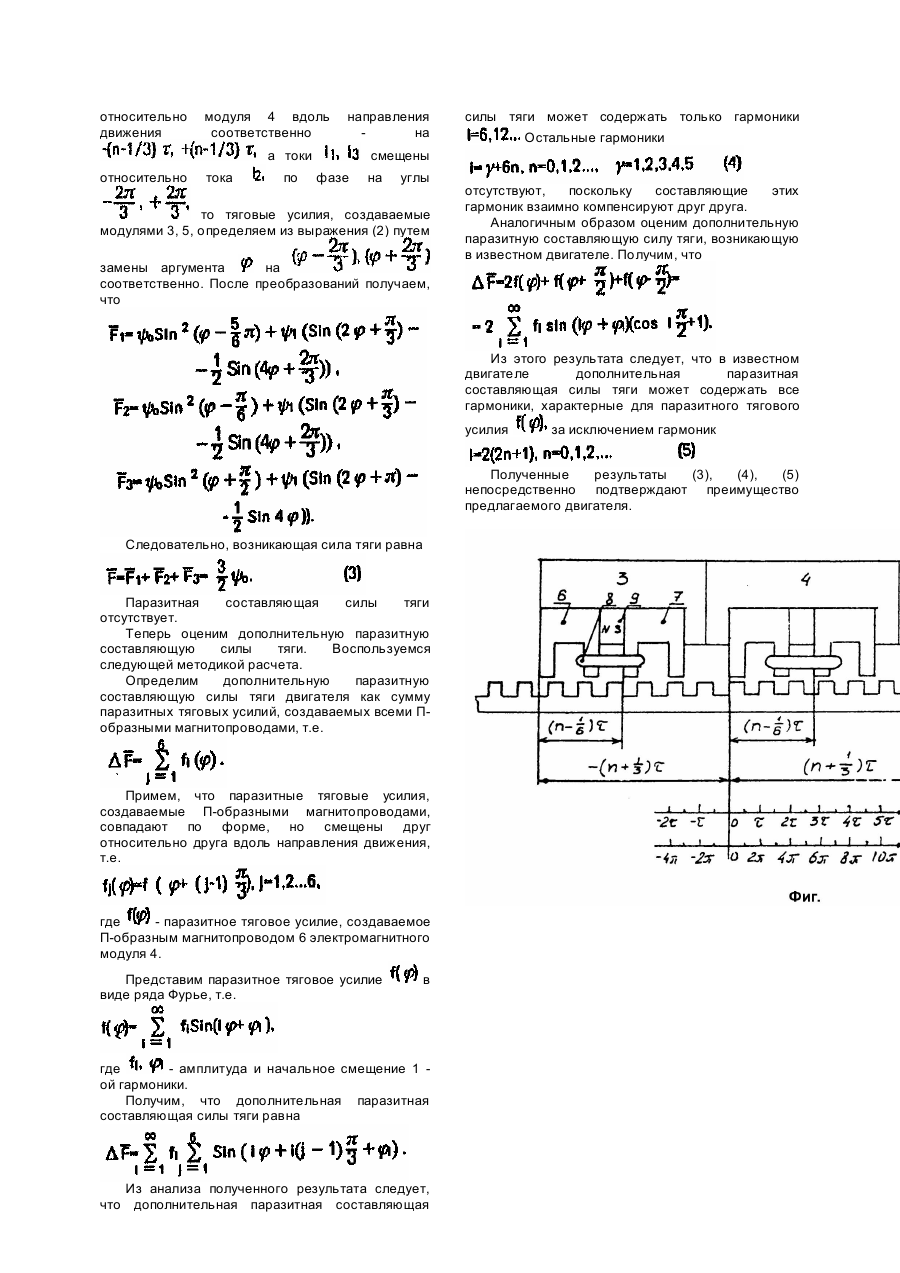
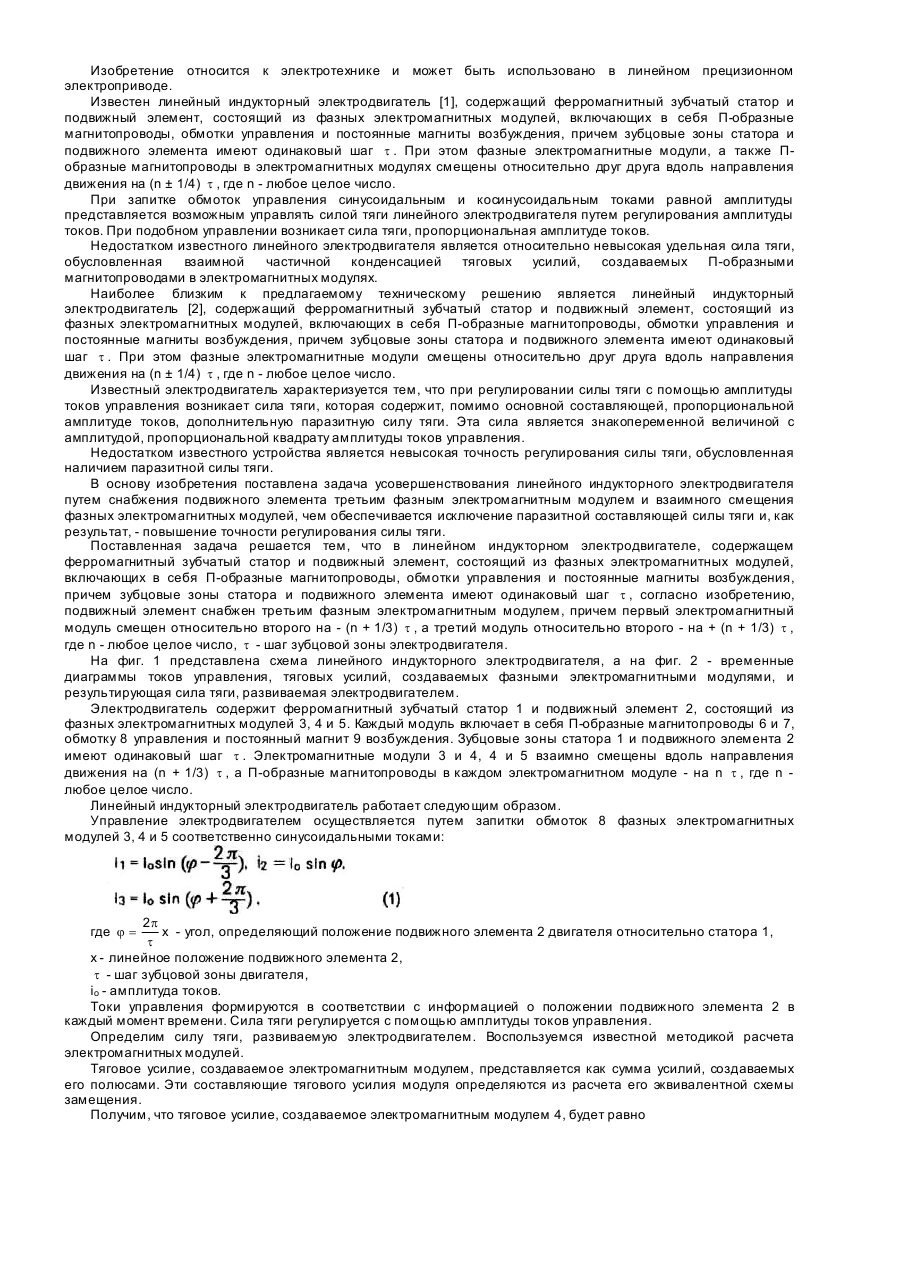
Изобретение относится к электротехнике и может быть использовано в линейном прецизионном электроприводе. Наиболее близким к предлагаемому является линейный индукторный двигатель [1], содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг. При этом электромагнитные модули разных фаз, а также Побразные магнитопроводы в каждом электромагнитном модуле смещены относительно друг друга вдоль направления движения на где - шаг зубцовой зоны двигателя, - целое число. Известный двигатель обладает довольно высокой точностью управления силой тяги, поскольку не возникает паразитной составляющей силы тяги, пропорциональной квадрату амплитуды фазных токов. Недостатком известного устройства является относительно невысокая точность управления силой тяги, обусловленная наличием дополнительной паразитной составляющей силы тяги. Предполагаемое изобретение направлено на повышение точности управления силой тяги путем уменьшения дополнительной паразитной составляющей силы тяги. Решение поставленной задачи достигается тем, что в линейном индукторном двигателе, содержащем ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя Побразные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг, подвижный элемент выполнен из трех электромагнитных модулей, первый модуль смещен относительно второго вдоль направления движения на а третий относительно второго - на Побразные магнитопроводы в каждом электромагнитном модуле смещены относительно друг друга вдоль направления движения на где - шаг зубцовой зоны двигателя, - целое число. Указанное выполнение подвижного элемента двигателя позволяет решить поставленную задачу повышения точности управлений силой тяги. При управлении силой тяги двигателя путем регулирования амплитуды фазных токов паразитной составляющей, пропорциональной квадрату амплитуды фазных токов, не возникает. Дополнительная же паразитная составляющая сила тяги существенно уменьшается за счет эффекта взаимной компенсации составляющих ее гармоник. Промышленное применение предлагаемого изобретения в линейном прецизионном электроприводе за счет повышения точности управления силой тяги линейного двигателя обеспечивает улучшение точностных характеристик электропривода. На чертеже (фиг.) представлена схема линейного трехфазного индукторного двигателя. Двигатель содержит ферромагнитный зубчатый статор 1 и подвижный элемент 2, состоящий из электромагнитных модулей 3, 4, 5. Каждый модуль включает в себя П-образные магнитопроводы 6, 7, обмотку 8 управления и постоянный магнит 9 возбуждения. Зубцовые зоны статора 1 и подвижного элемента 2 имеют одинаковый шаг Электромагнитные модули 3 и 4, 4 и 5 взаимно смещены вдоль направления движения на П-образные магнитопроводы в каждом электромагнитном модуле - на где - целое число. Двигатель работает следующим образом. Обмотки 8 управления электромагнитных модулей 3, 4, 5 запитывают синусоидальными токами: где - угол, определяющий положение подвижного элемента 2 двигателя относительно статора 1; - угол, определяющий взаимное смещение П-образных магнитопроводов 6, 7 в электромагнитном модуле; - положение подвижного элемента 2 двигателя вдоль направления движения; - шаг зубцовой зоны двигателя; - амплитуда токов. Возникает сила тяги, которая равна сумме тяговых усилий, развиваемых электромагнитными модулями 3, 4, 5. Для определения тягового усилия, развиваемого электромагнитным модулем, воспользуемся известной методикой расчета электромагнитных модулей, в соответствии с которой тяговое усилие модуля определяют как сумму усилий, развиваемых его полюсами. Эти составляющие тягового усилия определяют из схемы замещения электромагнитного модуля. Получаем, что электромагнитный модуль 4 развивает тяговое усилие внутренняя магнитная проводимость, проводимость рассеяния, МДС постоянного магнита 9 возбуждения соответственно; - постоянная составляющая и амплитуда изменения магнитной проводимости зазора между статором и подвижным элементом; - число витков обмотки 8 управления. Поскольку электромагнитные модули 3,5 смещены относительно движения модуля 4 вдоль соответственно направления на а токи относительно тока по силы тяги может содержать только гармоники Остальные гармоники смещены фазе на углы то тяговые усилия, создаваемые модулями 3, 5, определяем из выражения (2) путем замены аргумента на соответственно. После преобразований получаем, что отсутствуют, поскольку составляющие этих гармоник взаимно компенсируют друг друга. Аналогичным образом оценим дополнительную паразитную составляющую силу тяги, возникающую в известном двигателе. Получим, что Из этого результата следует, что в известном двигателе дополнительная паразитная составляющая силы тяги может содержать все гармоники, характерные для паразитного тягового усилия за исключением гармоник Полученные результаты (3), (4), (5) непосредственно подтверждают преимущество предлагаемого двигателя. Следовательно, возникающая сила тяги равна Паразитная составляющая силы тяги отсутствует. Теперь оценим дополнительную паразитную составляющую силы тяги. Воспользуемся следующей методикой расчета. Определим дополнительную паразитную составляющую силы тяги двигателя как сумму паразитных тяговых усилий, создаваемых всеми Побразными магнитопроводами, т.е. Примем, что паразитные тяговые усилия, создаваемые П-образными магнитопроводами, совпадают по форме, но смещены друг относительно друга вдоль направления движения, т.е. где - паразитное тяговое усилие, создаваемое П-образным магнитопроводом 6 электромагнитного модуля 4. Представим паразитное тяговое усилие виде ряда Фурье, т.е. в где - амплитуда и начальное смещение 1 ой гармоники. Получим, что дополнительная паразитная составляющая силы тяги равна Из анализа полученного результата следует, что дополнительная паразитная составляющая
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear inductor motor
Автори англійськоюYaroslavtsev Mykhailo Ivanovych
Назва патенту російськоюЛинейный индукторный двигатель
Автори російськоюЯрославцев Михаил Иванович
МПК / Мітки
МПК: H02K 41/02
Мітки: лінійний, двигун, індукторний
Код посилання
<a href="https://ua.patents.su/2-15450-linijjnijj-induktornijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Лінійний індукторний двигун</a>
Лінійний індукторний двигун
Номер патенту: 3221
Опубліковано: 26.12.1994
Автори: Ярославцев Михайло Іванович, Волков Геннадій Дмитрович, Зільберт Ігор Михайлович
МПК: H02K 41/03
Мітки: лінійний, двигун, індукторний
Формула / Реферат:
1. Линейный индукторный двигатель, содержащий ферромагнитный статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающий в себя П-образные магнитопроводы, обмотки управления и постоянные магниты, причем ферромагнитный зубчатый статор и П-образные магнитопроводы подвижного элемента, зубцовые зоны которых имеют одинаковый шаг, разделены на магнитопроводящие секции в направлении, перпендикулярном направлению движения, и...
Лінійний двофазний індукторний двигун
Номер патенту: 9830
Опубліковано: 30.09.1996
Автори: Зільберг Ігор Михайлович, Ярославцев Михайло Іванович
МПК: H02K 41/03
Мітки: двигун, індукторний, двофазний, лінійний
Формула / Реферат:
(57) Линейный двухфазный индукторный двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из четырех электромагнитных модулей, каждый из которых включает в себя два П-образных магнитопровода, обмотку управления и постоянный магнит, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг , а электромагнитные модули разных фаз...
Лінійний індукторний електродвигун
Номер патенту: 2926
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02K 41/03
Мітки: індукторний, електродвигун, лінійний
Формула / Реферат:
Линейный индукторный электродвигатель, содержащий ферромагнитный зубча тый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг, отличающийся тем, что подвижный элемент снабжен третьим фазным электромагнитным модулем, причем первый электромагнитный...
Лінійний індукторний двигун
Номер патенту: 1825
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02K 41/02
Мітки: лінійний, двигун, індукторний
Формула / Реферат:
1. Линейный индукторный двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, отличающийся тем, что, с целью повышения точности регулирования силы тяги, по крайней мере два магнитопроводящих элемента, принадлежащие одной фазе, смещены друг относительно друга вдоль направления...
Спосіб частотно-струмового управління двофазним синхронним двигуном
Номер патенту: 9831
Опубліковано: 30.09.1996
Автори: Павлов Євген Федорович, Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: двофазним, частотно-струмового, двигуном, спосіб, сінхронним, управління
Формула / Реферат:
(57) Способ частотно-токового управления двухфазным синхронным двигателем, при котором фазные обмотки двигателя запиты-вают синусоидальным и косинусоидальным токами равной амплитуды, регулируя амплитуду которых, управляют моментом, отличающийся тем, что предварительно определяют угловую погрешность взаимной установки фазных секций двигателя и фазные обмотки запитывают указанными токами, сдвинутыми по фазе на угол, равный указанной...
Попередній патент: Розподільчий пристрій
Наступний патент: Пристрій для охолоджування формуючих пуансонів взуттєвих машин
Випадковий патент: Механізм приводу складених голок основов`язальної машини