Захоплювач промислового робота
Формула / Реферат
1. Захоплювач промислового робота, що містить корпус, губки захоплювача, виконані у вигляді встановлених із можливістю поздовжнього переміщення підпружинених елементів із робочою частиною у вигляді загостреної голки, який відрізняється тим, що загострена голка виконана розрізною по міделеву перерізу, при цьому одна з половин голки виконана нерухомою і жорстко скріплена з корпусом перпендикулярно його поверхні, а друга половина - шарнірно зв’язана з нерухомою половиною і встановлена відносно неї з можливістю повороту.
2. Захоплювач промислового робота за п. 1, який відрізняється тим, що загострена голка виступає відносно корпусу не більш ніж на товщину захоплюваного виробу.
Текст
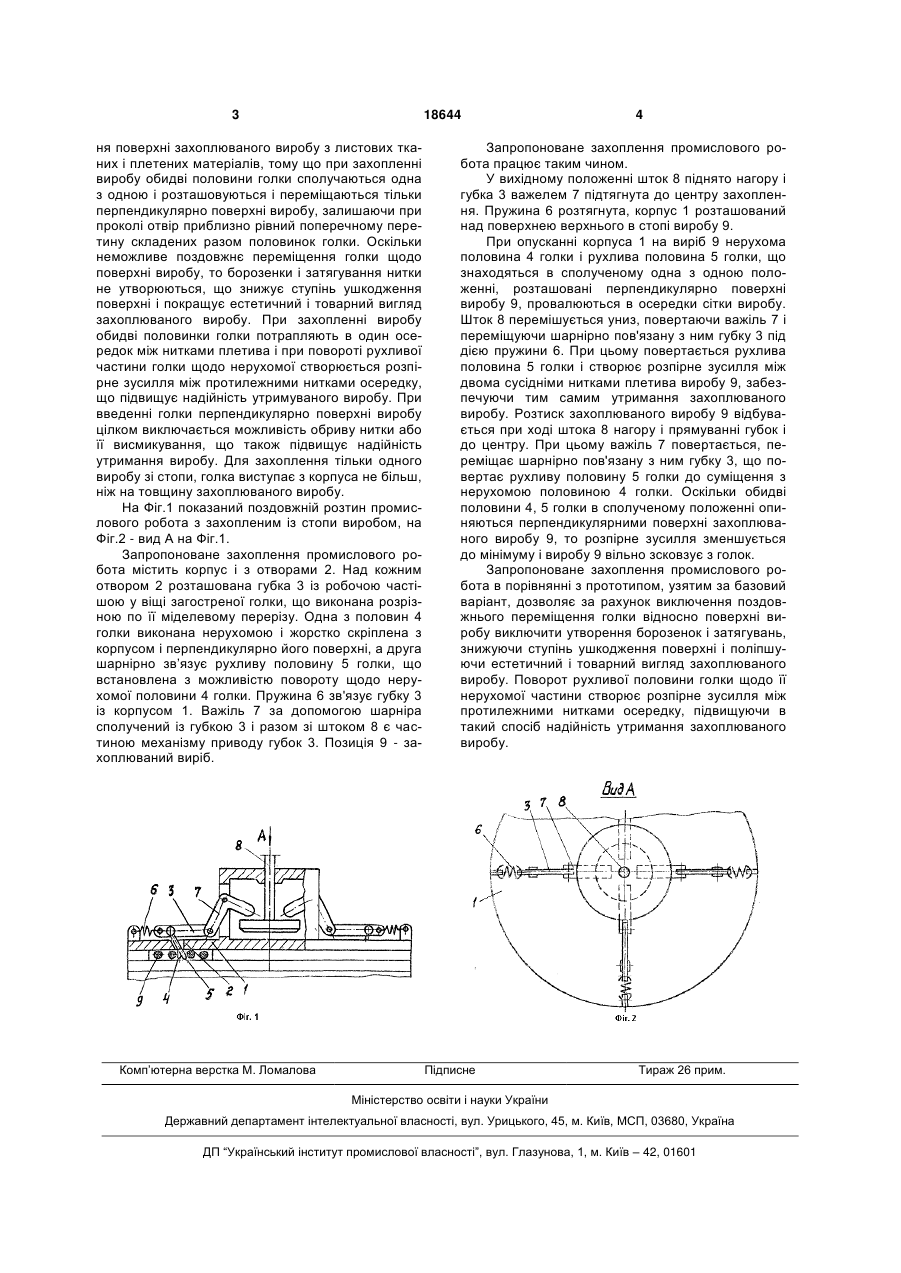
1. Захоплювач промислового робота, що містить корпус, губки захоплювача, виконані у вигляді встановлених із можливістю поздовжнього переміщення підпружинених елементів із робочою частиною у вигляді загостреної голки, який відрізня 3 18644 ня поверхні захоплюваного виробу з листових тканих і плетених матеріалів, тому що при захопленні виробу обидві половини голки сполучаються одна з одною і розташовуються і переміщаються тільки перпендикулярно поверхні виробу, залишаючи при проколі отвір приблизно рівний поперечному перетину складених разом половинок голки. Оскільки неможливе поздовжнє переміщення голки щодо поверхні виробу, то борозенки і затягування нитки не утворюються, що знижує ступінь ушкодження поверхні і покращує естетичний і товарний вигляд захоплюваного виробу. При захопленні виробу обидві половинки голки потрапляють в один осередок між нитками плетива і при повороті рухливої частини голки щодо нерухомої створюється розпірне зусилля між протилежними нитками осередку, що підвищує надійність утримуваного виробу. При введенні голки перпендикулярно поверхні виробу цілком виключається можливість обриву нитки або її висмикування, що також підвищує надійність утримання виробу. Для захоплення тільки одного виробу зі стопи, голка виступає з корпуса не більш, ніж на товщину захоплюваного виробу. На Фіг.1 показаний поздовжній розтин промислового робота з захопленим із стопи виробом, на Фіг.2 - вид А на Фіг.1. Запропоноване захоплення промислового робота містить корпус і з отворами 2. Над кожним отвором 2 розташована губка 3 із робочою частішою у віщі загостреної голки, що виконана розрізною по її міделевому перерізу. Одна з половин 4 голки виконана нерухомою і жорстко скріплена з корпусом і перпендикулярно його поверхні, а друга шарнірно зв’язує рухливу половину 5 голки, що встановлена з можливістю повороту щодо нерухомої половини 4 голки. Пружина 6 зв'язує губку 3 із корпусом 1. Важіль 7 за допомогою шарніра сполучений із губкою 3 і разом зі штоком 8 є частиною механізму приводу губок 3. Позиція 9 - захоплюваний виріб. Комп’ютерна верстка М. Ломалова 4 Запропоноване захоплення промислового робота працює таким чином. У вихідному положенні шток 8 піднято нагору і губка 3 важелем 7 підтягнута до центру захоплення. Пружина 6 розтягнута, корпус 1 розташований над поверхнею верхнього в стопі виробу 9. При опусканні корпуса 1 на виріб 9 нерухома половина 4 голки і рухлива половина 5 голки, що знаходяться в сполученому одна з одною положенні, розташовані перпендикулярно поверхні виробу 9, провалюються в осередки сітки виробу. Шток 8 перемішується униз, повертаючи важіль 7 і переміщуючи шарнірно пов'язану з ним губку 3 під дією пружини 6. При цьому повертається рухлива половина 5 голки і створює розпірне зусилля між двома сусідніми нитками плетива виробу 9, забезпечуючи тим самим утримання захоплюваного виробу. Розтиск захоплюваного виробу 9 відбувається при ході штока 8 нагору і прямуванні губок і до центру. При цьому важіль 7 повертається, переміщає шарнірно пов'язану з ним губку 3, що повертає рухливу половину 5 голки до суміщення з нерухомою половиною 4 голки. Оскільки обидві половини 4, 5 голки в сполученому положенні опиняються перпендикулярними поверхні захоплюваного виробу 9, то розпірне зусилля зменшується до мінімуму і виробу 9 вільно зсковзує з голок. Запропоноване захоплення промислового робота в порівнянні з прототипом, узятим за базовий варіант, дозволяє за рахунок виключення поздовжнього переміщення голки відносно поверхні виробу виключити утворення борозенок і затягувань, знижуючи ступінь ушкодження поверхні і поліпшуючи естетичний і товарний вигляд захоплюваного виробу. Поворот рухливої половини голки щодо її нерухомої частини створює розпірне зусилля між протилежними нитками осередку, підвищуючи в такий спосіб надійність утримання захоплюваного виробу. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGripper of industrial robot
Назва патенту російськоюЗахват промышленного робота
МПК / Мітки
МПК: B25J 15/04
Мітки: промислового, захоплювач, робота
Код посилання
<a href="https://ua.patents.su/2-18644-zakhoplyuvach-promislovogo-robota.html" target="_blank" rel="follow" title="База патентів України">Захоплювач промислового робота</a>
Двозахватний пристрій промислового робота

Номер патенту: 18720
Опубліковано: 15.11.2006
Автори: Годунко Максим Олегович, Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: B23Q 3/06, B25J 18/00
Мітки: двозахватний, робота, пристрій, промислового
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, який складається з механізму зміни захватів місцями, фланця, кисті та захватів, який відрізняється тим, що його устатковано гальмівним механізмом, а вісь захвату виконано паралельно осі руки робота.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що як гальмівний механізм використано гідравлічні демпфери.
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович
МПК: F16S 5/00
Мітки: робота, двозахватний, промислового, пристрій
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Двозахоплювальний пристрій промислового робота

Номер патенту: 18300
Опубліковано: 15.11.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: B65H 09/00
Мітки: робота, промислового, двозахоплювальний, пристрій
Формула / Реферат:
Двозахоплювальний пристрій промислового робота для одночасного затискання двох деталей, що складається з корпусу, в якому розміщені шток-рейка, з поршнем всередині, та рейкове колесо, пневмоциліндра, важеля, фланця та захоплювачів, який відрізняється тим, що його устатковано рейковим механізмом, а один із захоплювачів виконано підпружиненим.
Струминний захоплювач
Номер патенту: 33825
Опубліковано: 15.02.2001
Автори: Савків Володимир Богданович, Лобур Тарас Богданович, Проць Ярослав Іванович, Козбур Ігор Романович
МПК: B25J 15/06
Мітки: захоплювач, струминний
Текст:
...циліндричними поверхнями корпуса 1 і об'єкта б, в ньому виникає аеродинамічний ефект, що характеризується переважаючою у порівняні з силою тертя, присмоктуючою дією струменя. В результаті чого відбувається процес захоплення об'єкта. Притягнутий до сопла 5 та вільно рухомий на утвореній в зазорі 7 повітряній подушці, об'єкт фіксується від зміщення в осьовому напрямку за допомогою бічних упорів (на кресленні не позначено). Додатковий ефект...
Струминний захоплювач

Номер патенту: 32349
Опубліковано: 15.12.2000
Автори: Проць Ярослав Іванович, Лобур Тарас Богданович, Козбур Ігор Романович, Савків Володимир Богданович
МПК: B25J 15/06
Мітки: струминний, захоплювач
Текст:
...повітря, зумовлює обмежену площу охоплення струменем зовнішньої сферичної поверхні об'єкта, що призводить до низької вантажопідйомності і точності центрування в результаті малої дії аеродинамічного ефекту. В основу винаходу поставлено задачу шдаищити точність позиціювання і вантажопідйомність захоплювача-присоса при маніпулюванні об'єктами з яскраво вираженою сферичною поверхнею, шляхом виконання на торці корпуса порожнини сферичної форми з...
Попередній патент: Пристрій для змащування бокової поверхні рейки підйомно-транспортного засобу
Наступний патент: Процес виготовлення виробів
Випадковий патент: Апарат електрохімічного очищення стічних вод