Двозахватний пристрій промислового робота
Номер патенту: 18720
Опубліковано: 15.11.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович, Годунко Максим Олегович

Формула / Реферат
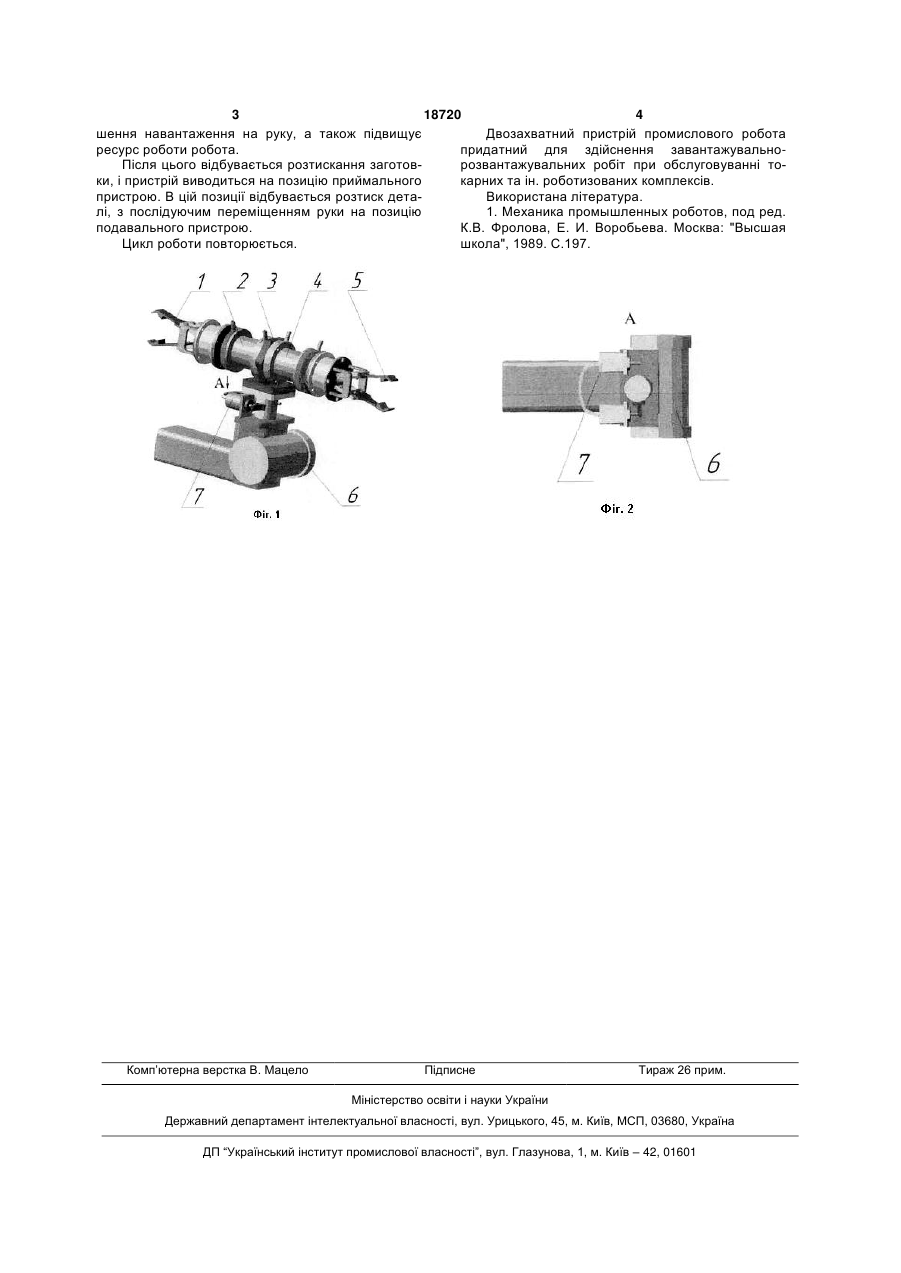
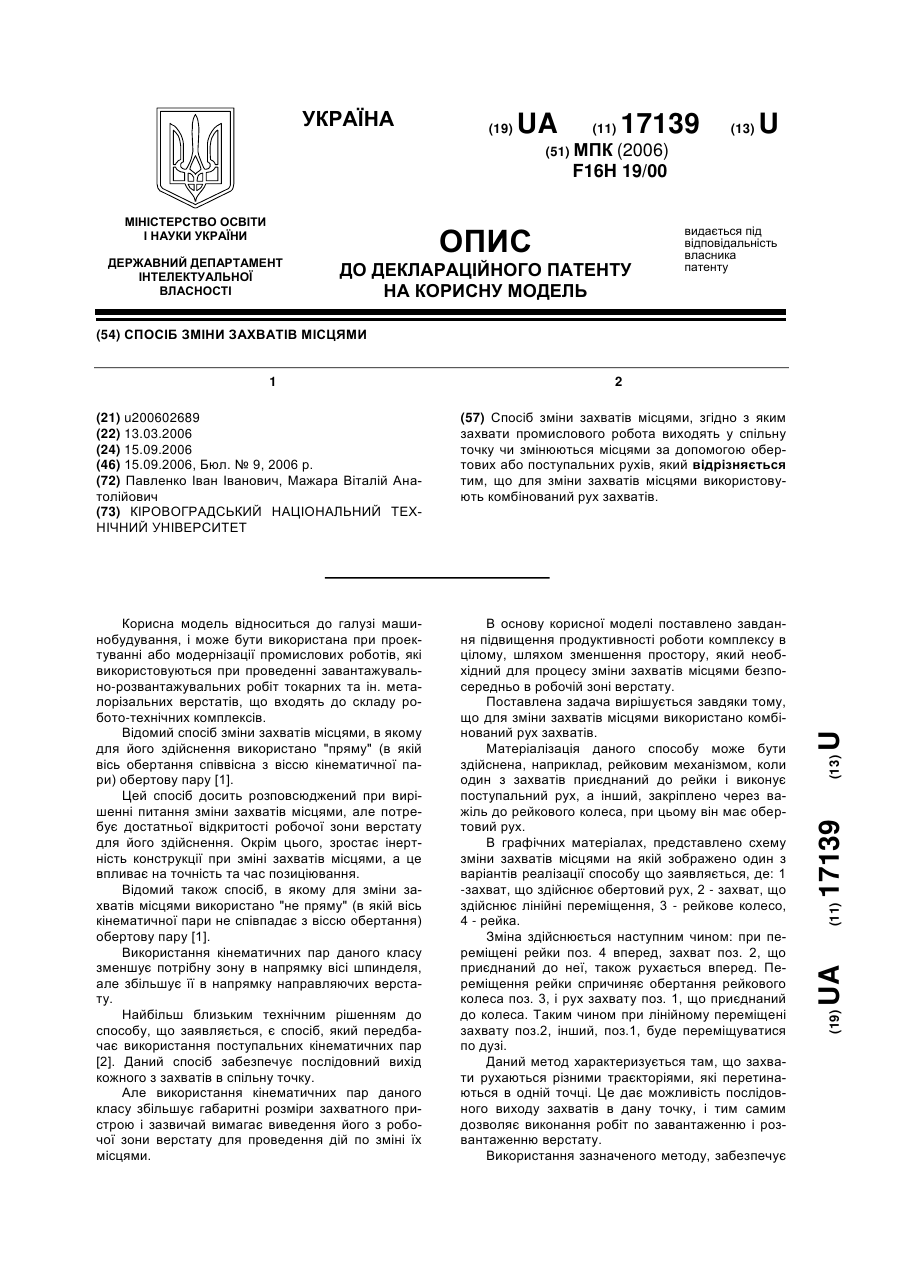
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, який складається з механізму зміни захватів місцями, фланця, кисті та захватів, який відрізняється тим, що його устатковано гальмівним механізмом, а вісь захвату виконано паралельно осі руки робота.
2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що як гальмівний механізм використано гідравлічні демпфери.
Текст
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, який складається з механізму зміни захватів місцями, фланця, кисті та захватів, який відрізняється тим, що його устатковано гальмівним механізмом, а вісь захвату виконано паралельно осі руки робота. 2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що як гальмівний механізм використано гідравлічні демпфери. (19) (21) u200605886 (22) 29.05.2006 (24) 15.11.2006 (46) 15.11.2006, Бюл. № 11, 2006 р. (72) Павленко Іван Іванович, Мажара Віталій Анатолійович, Годунко Максим Олегович (73) КІРОВОГРАДСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ 3 18720 4 шення навантаження на руку, а також підвищує Двозахватний пристрій промислового робота ресурс роботи робота. придатний для здійснення завантажувальноПісля цього відбувається розтискання заготоврозвантажувальних робіт при обслуговуванні токи, і пристрій виводиться на позицію приймального карних та ін. роботизованих комплексів. пристрою. В цій позиції відбувається розтиск детаВикористана література. лі, з послідуючим переміщенням руки на позицію 1. Механика промышленных роботов, под ред. подавального пристрою. К.В. Фролова, Е. И. Воробьева. Москва: "Высшая Цикл роботи повторюється. школа", 1989. С.197. Комп’ютерна верстка В. Мацело Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDouble-gripper device of industrial robot
Автори англійськоюPavlenko Ivan Ivanovych, Mazhara Vitalii Anatoliiovych, Hodunko Maksym Olehovych
Назва патенту російськоюДвухзахватное устройство промышленного робота
Автори російськоюПавленко Иван Иванович, Мажара Виталий Анатольевич, Годунко Максим Олегович
МПК / Мітки
МПК: B23Q 3/06, B25J 18/00
Мітки: двозахватний, промислового, пристрій, робота
Код посилання
<a href="https://ua.patents.su/2-18720-dvozakhvatnijj-pristrijj-promislovogo-robota.html" target="_blank" rel="follow" title="База патентів України">Двозахватний пристрій промислового робота</a>
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович
МПК: F16S 5/00
Мітки: промислового, робота, пристрій, двозахватний
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Двозахоплювальний пристрій промислового робота

Номер патенту: 18300
Опубліковано: 15.11.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: B65H 09/00
Мітки: промислового, робота, пристрій, двозахоплювальний
Формула / Реферат:
Двозахоплювальний пристрій промислового робота для одночасного затискання двох деталей, що складається з корпусу, в якому розміщені шток-рейка, з поршнем всередині, та рейкове колесо, пневмоциліндра, важеля, фланця та захоплювачів, який відрізняється тим, що його устатковано рейковим механізмом, а один із захоплювачів виконано підпружиненим.
Адаптивний захватний пристрій інтелектуального робота

Номер патенту: 14569
Опубліковано: 15.05.2006
Автори: Кондратенко Юрій Пантелійович, Швець Едуард Анатолійович
МПК: B25J 15/00
Мітки: робота, пристрій, адаптивний, захватний, інтелектуального
Формула / Реферат:
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, інтерфейс якого містить чотири входи і чотири виходи, у губках виконані напрямні пази, у яких з можливістю переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість...
Спосіб зміни захватів місцями
Номер патенту: 17139
Опубліковано: 15.09.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: F16H 19/00
Мітки: місцями, захватів, спосіб, зміни
Формула / Реферат:
Спосіб зміни захватів місцями, згідно з яким захвати промислового робота виходять у спільну точку чи змінюються місцями за допомогою обертових або поступальних рухів, який відрізняється тим, що для зміни захватів місцями використовують комбінований рух захватів.
Спосіб промислового виробництва шипучих алкогольних напоїв (варіанти) і пристрій для його здійснення
Номер патенту: 77050
Опубліковано: 16.10.2006
Автор: Мічев Георгі Асенов
Мітки: шипучих, варіанти, виробництва, спосіб, пристрій, алкогольних, напоїв, здійснення, промислового
Формула / Реферат:
1. Спосіб промислового виробництва шипучих алкогольних напоїв, за яким вихідну суміш готують і піддають спиртовому бродінню в герметичному просторі, стабілізують і фільтрують, виконуючи все цe в одному і тому ж герметичному просторі, а отримані напої залишають у вказаному просторі до моменту їх споживання, причому фільтрування і стабілізацію здійснюють одночасно, який відрізняється тим, що спиртове бродіння є керованим, при цьому температуру...
Попередній патент: Спосіб відвалоутворення
Наступний патент: Штанга обприскувача з динамічним гасником коливань
Випадковий патент: Тканий фільтрувальний рукав