Система регулювання натягу ниток основи з урахуванням радіуса навоя, який змінюється
Номер патенту: 41128
Опубліковано: 12.05.2009
Автори: Якимчук Сергій Георгійович, Китаєв Олександр Васильович, Якимчук Георгій Сергійович
Формула / Реферат
Система регулювання натягу ниток основи з урахуванням зміни радіуса навоя, який змінюється, що складається з вимірювальної ланки, ланки порівняння, підсилювача потужності і привідного двигуна постійного струму з якірним керуванням, яка відрізняється тим, що вимірювальна ланка складається з одного датчика комбінованого типу, виконаного у вигляді поворотної рами, механічно зв'язаної з валом сельсина-датчика.
Текст
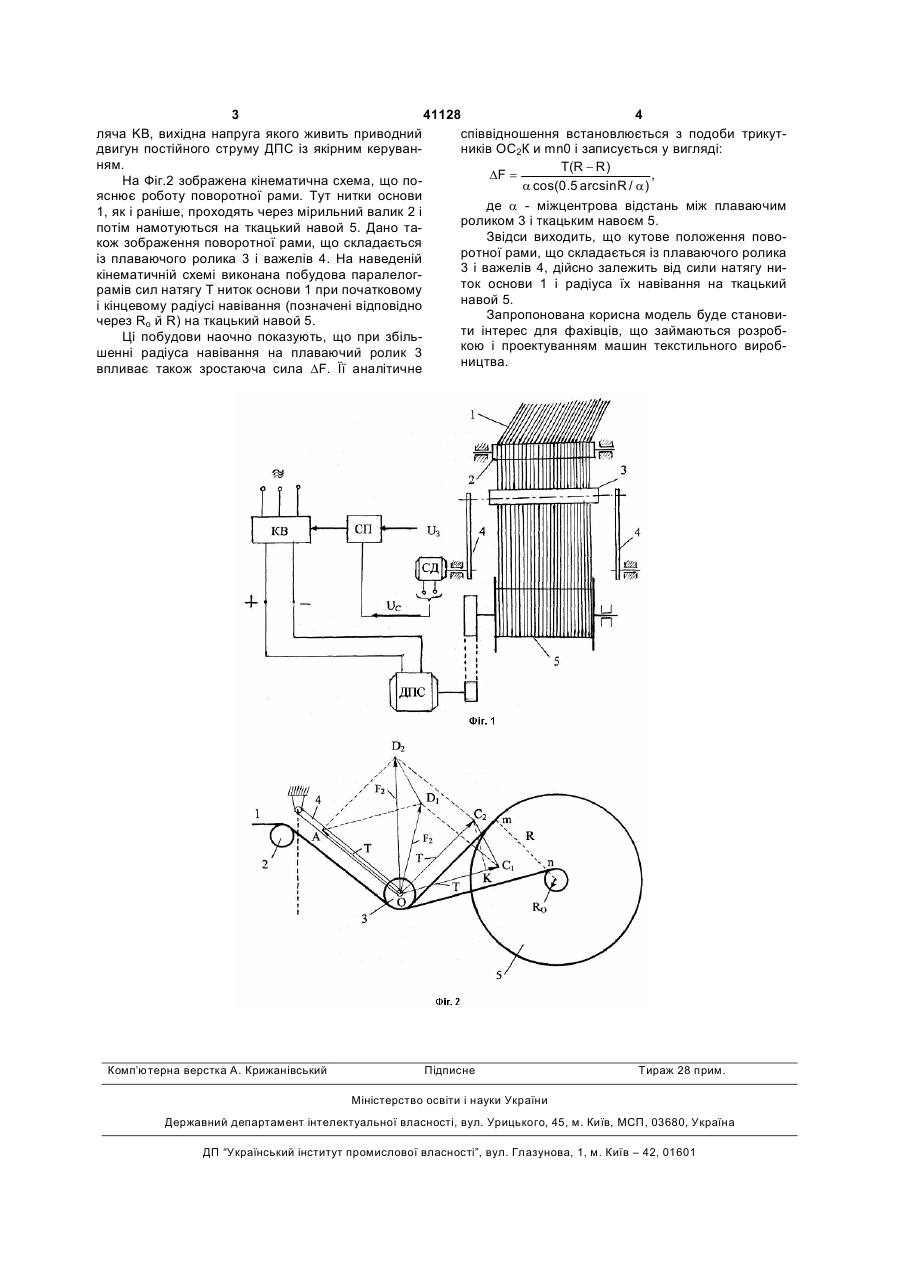
Система регулювання натягу ниток основи з урахуванням зміни радіуса навоя, який змінюється, що складається з вимірювальної ланки, ланки порівняння, підсилювача потужності і привідного двигуна постійного струму з якірним керуванням, яка відрізняється тим, що вимірювальна ланка складається з одного датчика комбінованого типу, виконаного у вигляді поворотної рами, механічно зв'язаної з валом сельсина-датчика. (19) (21) u200812870 (22) 04.11.2008 (24) 12.05.2009 (46) 12.05.2009, Бюл.№ 9, 2009 р. (72) ЯКИМЧУК ГЕОРГІЙ СЕРГІЙОВИЧ, UA, КИТАЄВ ОЛЕКСАНДР ВАСИЛЬОВИЧ, UA, ЯКИМЧУК СЕРГІЙ ГЕОРГІЙОВИЧ, UA (73) ХЕРСОНСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ, UA 3 41128 4 ляча KB, вихідна напруга якого живить приводний співвідношення встановлюється з подоби трикутдвигун постійного струму ДПС із якірним керуванників ОС2К и mn0 і записується у вигляді: ням. T(R - R) DF = , На Фіг.2 зображена кінематична схема, що поa cos(0.5 arcsinR / a ) яснює роботу поворотної рами. Тут нитки основи де a - міжцентрова відстань між плаваючим 1, як і раніше, проходять через мірильний валик 2 і роликом 3 і ткацьким навоєм 5. потім намотуються на ткацький навой 5. Дано таЗвідси виходить, що кутове положення повокож зображення поворотної рами, що складається ротної рами, що складається із плаваючого ролика із плаваючого ролика 3 і важелів 4. На наведеній 3 і важелів 4, дійсно залежить від сили натягу никінематичній схемі виконана побудова паралелогток основи 1 і радіуса їх навівання на ткацький рамів сил натягу Т ниток основи 1 при початковому навой 5. і кінцевому радіусі навівання (позначені відповідно Запропонована корисна модель буде становичерез Ro й R) на ткацький навой 5. ти інтерес для фахівців, що займаються розробЦі побудови наочно показують, що при збількою і проектуванням машин текстильного виробшенні радіуса навівання на плаваючий ролик 3 ництва. впливає також зростаюча сила DF. Її аналітичне Комп’ютерна верстка А. Крижанівський Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of tension of beam thread taking into account change of radius of beam
Автори англійськоюYakymchuk Heorgii Serhiiovych, Kytaiev Oleksandr Vasyliovych, Yakymchuk Serhii Heorhiiovych
Назва патенту російськоюСистема регулирования натяга нитей основы с учетом изменения радиуса навоя
Автори російськоюЯкимчук Георгий Сергеевич, Китаев Александр Васильевич, Якимчук Сергей Георгиевич
МПК / Мітки
МПК: B65H 59/00, B65H 77/00
Мітки: ниток, навоя, урахуванням, радіуса, основі, змінюється, натягу, система, регулювання
Код посилання
<a href="https://ua.patents.su/2-41128-sistema-regulyuvannya-natyagu-nitok-osnovi-z-urakhuvannyam-radiusa-navoya-yakijj-zminyuehtsya.html" target="_blank" rel="follow" title="База патентів України">Система регулювання натягу ниток основи з урахуванням радіуса навоя, який змінюється</a>
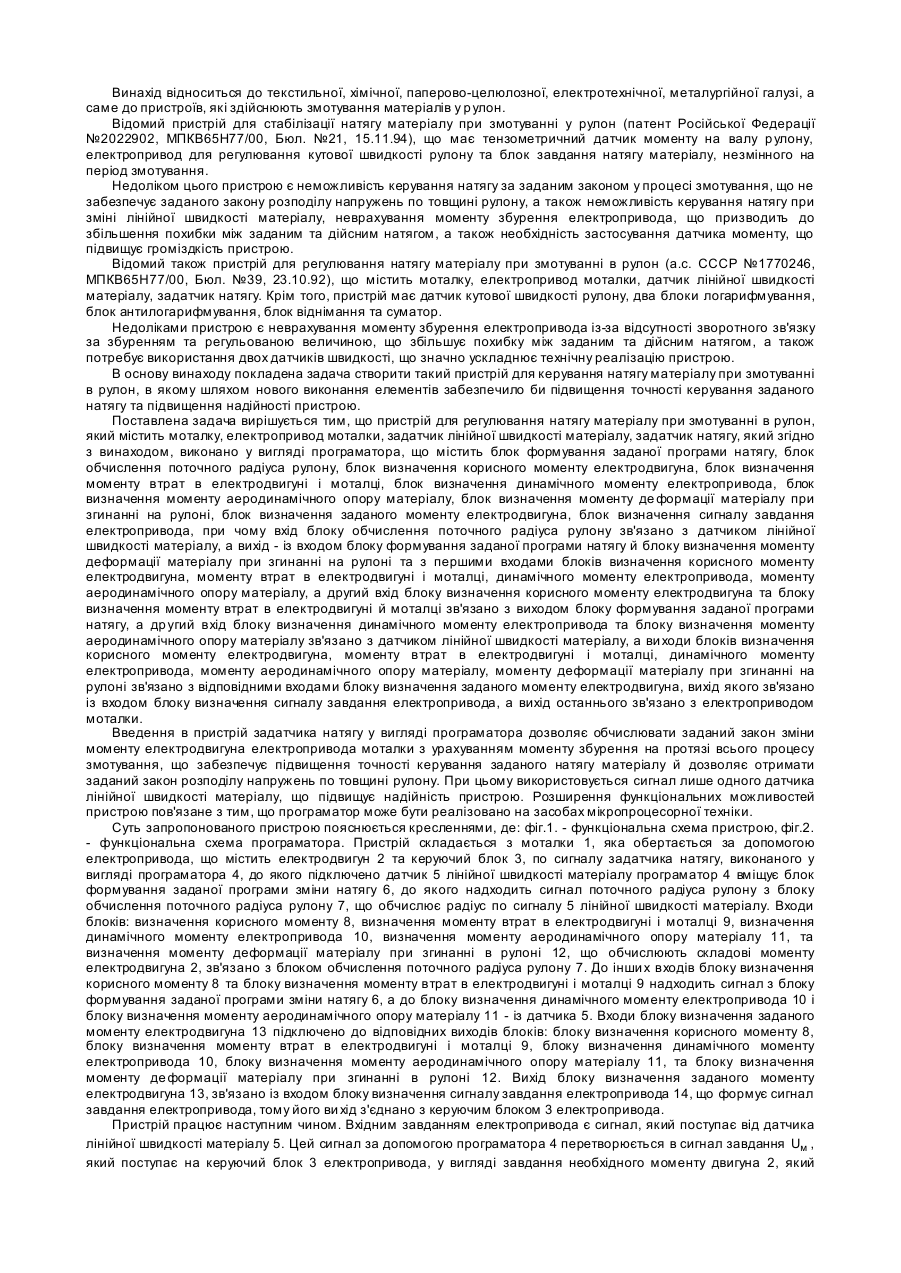
Пристрій для регулювання натягу матеріалу при змотуванні в рулон
Номер патенту: 70226
Опубліковано: 15.09.2004
Автори: Теряєв Віталій Іванович, Кириченко Юрій Олексійович, Кострицький Валерій Всеволодович, Островерхов Микола Якович
МПК: B65H 77/00
Мітки: змотуванні, рулон, натягу, регулювання, матеріалу, пристрій
Формула / Реферат:
Пристрій для регулювання натягу матеріалу при змотуванні в рулон, який містить моталку, яка обертається за допомогою електроприводу, який складається з електродвигуна та системи керування, датчик лінійної швидкості матеріалу, вихід якого зв'язаний з виходом блока логарифмування сигналу датчика лінійної швидкості матеріалу, датчик кутової швидкості рулона, вихід якого зв'язано з входом блока логарифмування сигналу датчика кутової швидкості...
Прилад управління натягом ниток основи на ткацьких верстатах
Номер патенту: 40456
Опубліковано: 16.07.2001
Автори: Чугін Валерій Віталійович, Тіманов Віктор Миколайович, Трубіна Олена Анатоліївна
МПК: D03D 49/04
Мітки: управління, основі, натягом, верстатах, ниток, ткацьких, прилад
Формула / Реферат:
Прилад управління натягом ниток основи на ткацьких верстатах, що містить механізм приводу натискувальних планок, розташований по обидва боки ткацького верстату з можливістю хитання відносно горизонтальної осі і змонтований між ними засіб компенсації натягу ниток основи у вигляді пари натискувальних планок, одна із яких розташована над верхньою площиною основних ниток, а друга - під нижньою площиною основних ниток, який відрізняється тим, що...
Пристрій для регулювання натягу матеріалу при змотуванні в рулон
Номер патенту: 70861
Опубліковано: 15.10.2004
Автори: Кириченко Юрій Олексійович, Кострицький Валерій Всеволодович, Островерхов Микола Якович, Теряєв Віталій Іванович
МПК: B65H 77/00
Мітки: натягу, регулювання, рулон, змотуванні, пристрій, матеріалу
Формула / Реферат:
Пристрій для регулювання натягу матеріалу при змотуванні в рулон, який містить моталку, електропривід моталки, датчик лінійної швидкості матеріалу, задатчик натягу, який відрізняється тим, що задатчик натягу виконано у вигляді програматора, який містить блок формування заданої програми натягу, блок обчислення поточного радіуса рулону, блок визначення корисного моменту електродвигуна, блок визначення моменту втрат в електродвигуні і моталці,...
Пристрій для регулювання значення радіального зазору-натягу

Номер патенту: 37609
Опубліковано: 10.12.2008
Автори: Кисловська Юлія Олександрівна, Ковальов Віктор Дмитрович, Мельник Максим Сергійович
МПК: F16C 25/00
Мітки: зазору-натягу, пристрій, регулювання, значення, радіального
Формула / Реферат:
Пристрій для регулювання значення радіального зазору-натягу, що містить радіальний дворядний роликопідшипник з конічним внутрішнім отвором та гайку для регулювання радіального зазору-натягу в підшипнику, який відрізняється тим, що зовнішнє кільце встановлено в корпусі шпиндельного вузла за допомогою цангового елемента, який з'єднаний з гідроциліндром, має можливість зміщення в осьовому напрямку, а також на підшипнику встановлений датчик...
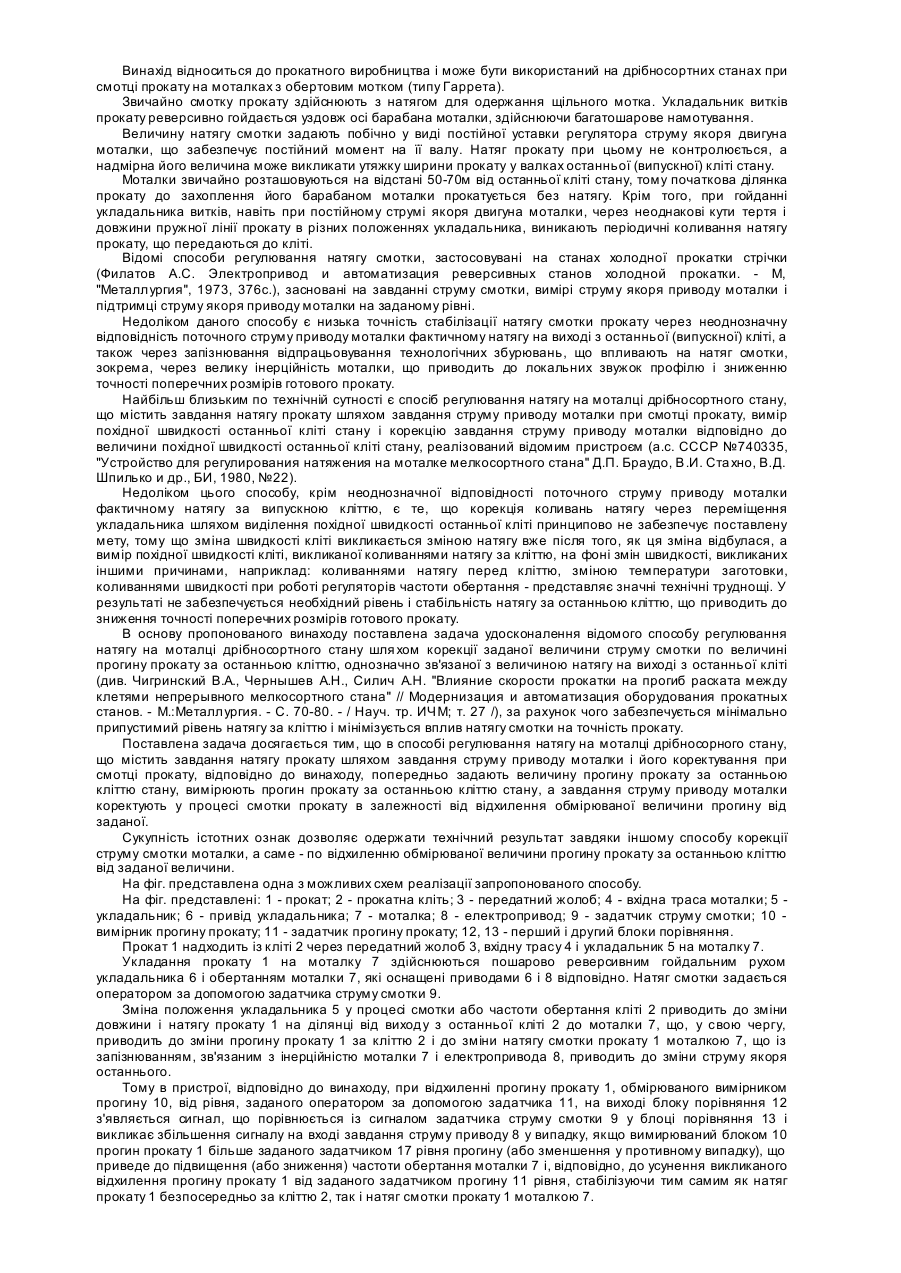
Спосіб регулювання натягу на моталці дрібносортного стану
Номер патенту: 63426
Опубліковано: 15.01.2004
Автори: Кекух Анатолій Володимирович, Політов Ігор Віталійович, Козуненко Анатолій Григорович, Куваєв Володимир Миколайович, Чигринський Володимир Олександрович, Скляр Олександр Всеволодович, Карпинський Юрій Пантелеймонович, Щур Віталій Андрійович, Шеремет Володимир Олександрович, Бабенко Михайло Антонович
МПК: B21C 47/00
Мітки: спосіб, стану, натягу, моталці, регулювання, дрібносортного
Формула / Реферат:
Спосіб регулювання натягу на моталці дрібносортного стану, за яким задають натяг прокату шляхом задавання струму приводу моталки і його коректування при змотуванні прокату, який відрізняється тим, що попередньо задають величину прогину прокату за останньою кліттю стану, вимірюють прогин прокату за останньою кліттю стану, а задавання струму приводу моталки коректують у процесі змотування прокату залежно від відхилення вимірюваної величини його...
Попередній патент: Машина для очищення насіння
Наступний патент: Роторно-пульсаційний апарат
Випадковий патент: Спосіб фітотерапії вторинних імунодефіцитних станів