Спосіб і прилад для ручного неруйнуючого контролю порожнистих шворнів осі, які мають профілі поперечного перерізу зі змінними внутрішнім і зовнішнім радіусами
Номер патенту: 100024
Опубліковано: 12.11.2012
Автори: Ногейра де Паула Ренато, Лезаж Фредерік, Ноель Александр
Формула / Реферат
1. Спосіб контролю шворнів осі за допомогою ультразвукових контактних датчиків, який відрізняється тим, що він включає в себе наступні етапи:
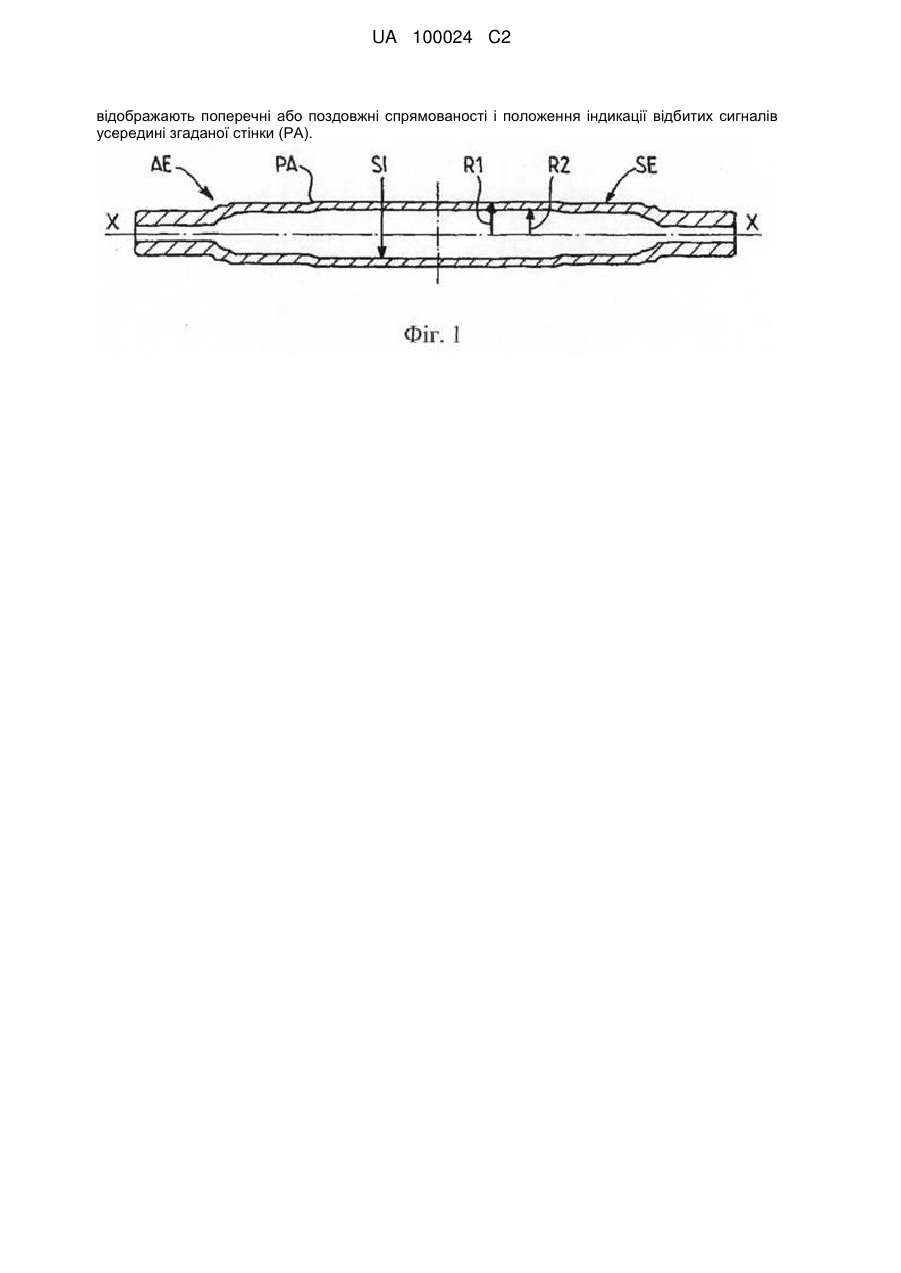
a) розміщення ручним способом щонайменше одного ультразвукового контактного датчика (SU) у першому місці, що вибирають на зовнішній (SE) або внутрішній (SI) поверхні стінки (РА) порожнистого шворня осі (АЕ), причому згадана стінка (РА) має профілі поперечного перерізу зі змінними і відомими зовнішнім і внутрішнім радіусами, причому кожне перше місце вибирають залежно від згаданих профілів поперечного перерізу і можливих габаритних розмірів і умов експлуатації згаданого шворня (АЕ), потім проведення аналізу за допомогою кожного контактного датчика (SU) першої вибраної ділянки згаданої стінки (РА) у першому вибраному кутовому секторі, орієнтованому в першому поздовжньому або поперечному напрямку, для одержання результатів аналізу для різних відносних кутових положень згаданого шворня (АЕ) відносно контактного датчика (SU);
b) встановлення вручну щонайменше одного контактного датчика (SU) у другому місці, що вибирають залежно від профілів поперечного перерізу стінки (РА) і згаданих можливих габаритних розмірів і умов експлуатації шворня (АЕ), потім проведення аналізу за допомогою кожного встановленого вручну контактного датчика (SU) другої вибраної ділянки згаданої стінки (РА) у другому вибраному кутовому секторі, орієнтованому в другому напрямку, протилежному згаданому першому напрямку, для одержання інших результатів аналізу для різних відносних кутових положень згаданого шворня (АЕ) відносно контактного датчика (SU);
c) складання з одержаних згаданих результатів аналізу карт, на яких відображені поперечні або поздовжні спрямованості і положення індикацій відбитих сигналів усередині згаданої стінки (РА).
2. Спосіб за п. 1, який відрізняється тим, що здійснюють перший раз етапи а)-с) шляхом розміщення вручну кожного ультразвукового контактного датчика (SU) на зовнішній поверхні (SE) згаданої стінки (РА) для складання карт, що відображають положення і спрямованості індикацій відбитих сигналів усередині згаданої стінки (РА); потім виконуються другий раз щонайменше етапи а) і с) шляхом розміщення вручну щонайменше одного ультразвукового контактного датчика (SU) на внутрішній поверхні (SI) згаданої стінки (РА) у третьому місці, що вибирають залежно від її профілів поперечного перерізу, а потім досліджують за допомогою кожного контактного датчика (SU) третю вибрану ділянку згаданої стінки (РА) у третьому вибраному кутовому секторі, орієнтованому щонайменше в одному вибраному поздовжньому або поперечному напрямку, для одержання результатів аналізу для різних відносних кутових положень шворня (АЕ) відносно контактного датчика (SU), і складають карти, що відображають положення і спрямованості індикацій відбитих сигналів усередині згаданої стінки (РА).
3. Спосіб за будь-яким з пп. 1 і 2, який відрізняється тим, що етапи а)-с) здійснюють щонайменше один раз шляхом розміщення вручну кожного ультразвукового контактного датчика (SU) на зовнішній (SE) або внутрішній (SI) поверхні згаданої стінки (РА) для проведення ультразвукового аналізу в кутовому секторі, орієнтованому в поздовжньому напрямку, і, таким чином, складають карти, що відображають поперечні спрямованості і положення індикацій відбитих сигналів усередині згаданої стінки (РА), потім повторно виконують також щонайменше один раз етапи а)-с) шляхом розміщення вручну щонайменше одного ультразвукового контактного датчика (SU) на зовнішній (SE) або внутрішній (SI) згаданій поверхні стінки (РА) для виконання ультразвукового аналізу в кутовому секторі, орієнтованому в поперечному напрямку, і, таким чином, складають карти, що відображають поздовжні спрямованості і положення індикацій відбитих сигналів усередині згаданої стінки (РА).
4. Спосіб за будь-яким з пп. 1-3, який відрізняється тим, що після виконання етапу с) передбачають етап d), у ході якого проводять аналіз щонайменше зовнішньої (SE) поверхні згаданої стінки (РА) за допомогою іншої технології аналізу, що відрізняється від технології, яка базується на ультразвукових коливаннях, для одержання результатів аналізу для різних відносних кутових положень щонайменше одного контактного датчика (SU) відносно згаданого шворня (АЕ).
5. Спосіб за п. 4, який відрізняється тим, що після виконання етапу d) передбачають етап e), у ході якого на підставі цих одержаних результатів аналізу складають карти, що відображають положення і спрямованості індикацій поверхні згаданої стінки (PA).
6. Спосіб за будь-яким з пп. 4 і 5, який відрізняється тим, що згадану іншу технологію аналізу вибирають із групи, що включає технологію так званого потоку розсіювання і технологію так званих вихрових струмів.
7. Спосіб за будь-яким з пп. 1-4, який відрізняється тим, що після виконання етапу с) передбачають етап d), у ході якого проводять аналіз щонайменше однієї зовнішньої (SE) поверхні згаданої стінки (РА) з використанням технології так званої перевірки намагніченими частинками (або МРІ) для одержання результатів аналізу поверхні для різних відносних кутових положень згаданого шворня (АЕ) відносно контактного датчика (SU).
8. Спосіб за будь-яким з пп. 1-7, який відрізняється тим, що проводять аналіз кожної з перших, других і, можливо, третіх ділянок згаданої стінки шляхом відносного поздовжнього переміщення щонайменше одного контактного датчика (SU) відносно згаданого шворня (АЕ) і/або шляхом електронного сканування за допомогою щонайменше одного контактного датчика (SU).
9. Спосіб за будь-яким з пп. 1-8, який відрізняється тим, що в процесі щонайменше одного з етапів а), b) і d) досягають різних відносних кутових положень згаданого шворня (АЕ) відносно кожного контактного датчика (SU), приводячи вручну в обертання кожний контактний датчик (SU) відносно згаданого шворня (АЕ).
10. Спосіб за будь-яким з пп. 1-9, який відрізняється тим, що він включає етап f), у ході якого проводять порівняння даних карт, одержаних на етапі с), з даними перших еталонних карт, які були зняті на першому еталонному шворні такого ж типу, що і контрольований, але не має вад, для одержання тільки даних, що містять індикації відбитих сигналів, які не представлені в згаданих перших еталонних картах, і складання, таким чином, корегованих карт.
11. Спосіб за будь-яким з пп. 1-10, який відрізняється тим, що він включає етап g), у ході якого проводять порівняння даних карт, одержаних на етапі с) або f), з даними других еталонних карт, які були зняті на другому еталонному шворні такого ж типу, що і контрольований, але має відомі вади, для одержання тільки даних, що містять індикації відбитих сигналів з відомими вадами, які були представлені в других згаданих еталонних картах, і складання, таким чином, карт вад.
12. Спосіб за будь-яким з пп. 1-11, який відрізняється тим, що він включає етап h), у ході якого проводять порівняння з вибраною амплітудою, що має порогову величину, амплітуд з даними карт, які були одержані на етапі с) або f), для одержання тільки даних, що містять індикації відбитих сигналів, амплітуди яких вищі згаданої амплітуди, що має порогову величину і повідомляє інформацію про наявність вад, і складання, у такий спосіб, карт вад.
13. Спосіб за п. 12, який відрізняється тим, що у випадку виявлення амплітуди, яка вища згаданої амплітуди, що має порогову величину, виробляють сигнал про порушення.
14. Спосіб за будь-яким з пп. 1-13, який відрізняється тим, що він включає етап і), у ході якого на екран (EC) дисплея виводять щонайменше одну карту.
15. Спосіб за будь-яким з пп. 1-14, який відрізняється тим, що використовують контактні датчики (SU), виконані з можливістю випромінювання ультразвукових коливань тільки в одному напрямку зі змінним кутом.
16. Спосіб за п. 15, який відрізняється тим, що згаданий кут міняється від приблизно 0° до приблизно 70° відносно поздовжнього або поперечного напрямку.
17. Спосіб за будь-яким з пп. 1-14, який відрізняється тим, що використовують контактні датчики (SU) типу так званої фазованої решітки, виконані з можливістю випромінювання ультразвукових коливань у напрямках, які знаходяться в заданому кутовому секторі.
18. Спосіб за п. 17, який відрізняється тим, що згаданий кутовий сектор становить від приблизно 0° до приблизно 70° відносно поздовжнього або поперечного напрямку.
19. Прилад для контролю шворнів осі, який відрізняється тим, що він містить: І) щонайменше один ультразвуковий контактний датчик (SU), установлюваний для проведення аналізу в вибраному кутовому секторі вибраних ділянок стінки (РА), що має профілі поперечного перерізу з відомими і змінними зовнішнім і внутрішнім радіусами, порожнистого шворня осі (АЕ), і одержання, таким чином, результатів аналізу; II) засоби контролю (МС), установлювані для визначення, залежно від згаданих профілів поперечного перерізу і можливих габаритних розмірів і умов експлуатації згаданого шворня, щонайменше першого і щонайменше другого вибраних місць на зовнішній (SE) або внутрішній (SI) поверхні стінки (РА), де вручну повинен бути розміщений кожний контактний датчик (SU) таким чином, щоб він здійснював аналіз щонайменше першої і щонайменше другої вибраних ділянок згаданої стінки (РА), відповідно щонайменше у першому і щонайменше у другому вибраних кутових секторах, орієнтованих у першому і другому протилежних поздовжньому і поперечному напрямках, і одержував, таким чином, результати аналізу для різних відносних кутових положень згаданого шворня (АЕ) відносно нього (SU), і III) засоби обробки (МТ), установлювані для складання на підставі одержаних результатів аналізу карт, що відображають поперечні або поздовжні спрямованості і положення індикації відбитих сигналів усередині згаданої стінки (РА).
20. Прилад за п. 19, який відрізняється тим, що згадані засоби контролю (МС) установлюються для визначення перед застосуванням вручну на кожному контактному датчику (SU) першого переміщення відносно зовнішньої (SE) поверхні згаданої стінки (РА) для одержання результатів аналізу для різних відносних кутових положень згаданого шворня (АЕ) відносно контактного датчика (SU), потім для визначення перед застосуванням вручну щонайменше на одному контактному датчику (SU) другого переміщення відносно внутрішньої (SI) поверхні згаданої стінки (РА) для проведення ним аналізу щонайменше третьої вибраної ділянки згаданої стінки (РА) щонайменше у третьому вибраному кутовому секторі, орієнтованому в вибраному поздовжньому або поперечному напрямку, і для одержання ним, таким чином, інших результатів аналізу для різних відносних кутових положень згаданого шворня (АЕ) відносно контактного датчика (SU), а також тим, що згадані засоби обробки (МТ) установлюються для складання на підставі згаданих одержаних результатів аналізу карт, що відображають положення і спрямованості індикацій відбитих сигналів усередині згаданої стінки (РА).
21. Прилад за будь-яким з пп. 19 і 20, який відрізняється тим, що згадані засоби контролю (МС) установлюються І) для визначення перед застосуванням вручну на кожному контактному датчику (SU) першого переміщення відносно зовнішньої (SE) або внутрішньої (SI) поверхні згаданої стінки (РА) для виконання ультразвукового аналізу в кутовому секторі, орієнтованому в поздовжньому напрямку, і для одержання результатів аналізу, на підставі яких згадані засоби обробки (МТ) складуть карти, що відображають поперечні спрямованості і положення індикацій відбитих сигналів, а потім II) для визначення перед застосуванням вручну на кожному контактному датчику (SU) щонайменше другого переміщення відносно зовнішньої (SE) або внутрішньої (SI) поверхні згаданої стінки (РА) для виконання ним ультразвукового аналізу в кутовому секторі, орієнтованому в поперечному напрямку, і для одержання ним результатів аналізу, на підставі яких згадані засоби обробки (МТ) складуть карти, що відображають поздовжні спрямованості і положення індикацій відбитих сигналів.
22. Прилад за будь-яким з пп. 19-21, який відрізняється тим, що він містить засоби аналізу поверхні, установлювані для проведення аналізу щонайменше зовнішньої (SE) поверхні згаданої стінки (РА) шляхом іншої технології аналізу, що відрізняється від технології, яка базується на ультразвукових коливаннях, для одержання результатів аналізу для різних відносних положень згаданого шворня (АЕ) відносно кожного контактного датчика (SU).
23. Прилад за п. 22, який відрізняється тим, що згадані засоби обробки (МТ) установлюються для складання на підставі згаданих результатів аналізу, одержаних за допомогою згаданих засобів аналізу поверхні (MAS), карт, що відображають положення і спрямованості індикацій поверхні згаданої стінки (РА).
24. Прилад за будь-яким з пп. 22 і 23, який відрізняється тим, що згадані засоби аналізу поверхні вибираються в групі, що включає засоби аналізу потоку розсіювання і засоби аналізу методом вихрових струмів.
25. Прилад за будь-яким з пп. 19-24, який відрізняється тим, що він містить засоби аналізу поверхні, установлювані для виконання аналізу щонайменше зовнішньої (SE) поверхні згаданої стінки (РА) шляхом перевірки намагніченими частинками (або МРІ) для одержання результатів аналізу поверхні для різних відносних кутових положень згаданого шворня (АЕ) відносно згаданих контактних датчиків (SU).
26. Прилад за будь-яким з пп. 19-25, який відрізняється тим, що згадані засоби контролю (МС) установлюються для здійснення електронного сканування за допомогою щонайменше одного контактного датчика (SU) для виконання ним аналізу частини щонайменше згаданих перших, других і, можливо, третіх ділянок згаданої стінки (PA).
27. Прилад за будь-яким з пп. 19-26, який відрізняється тим, що згадані засоби обробки (МТ) установлюються для здійснення порівняння даних карт, знятих зі згаданого контрольованого шворня (АЕ), з даними перших еталонних карт, які були одержані на першому еталонному шворні такого ж типу, що і контрольований, але не має вад, для збереження тільки даних, що містять індикації відбитих сигналів, які не представлені в згаданих перших еталонних картах, і складання, таким чином, корегованих карт.
28. Прилад за будь-яким з пп. 19-27, який відрізняється тим, що згадані засоби обробки (МТ) установлюються для здійснення порівняння даних карт, одержаних на згаданому контрольованому шворні (АЕ), з даними других еталонних карт, які були зняті з другого еталонного шворня такого ж типу, що і контрольований, але має відомі вади, і для збереження тільки даних, що містять індикації відбитих сигналів з відомими вадами, які були представлені в згаданих других еталонних картах, і складання, таким чином, карт вад.
29. Прилад за будь-яким з пп. 19-28, який відрізняється тим, що згадані засоби обробки (МТ) установлюються для проведення порівняння з вибраною амплітудою, що має порогову величину, амплітуд з даними карт, які були одержані на згаданому контрольованому шворні (АЕ), і збереження тільки даних, що містять індикації відбитих сигналів, амплітуди яких вище згаданої амплітуди, що має порогову величину, і які повідомляють інформацію про наявність вад, і складання, таким чином, карт вад.
30. Прилад за п. 29, який відрізняється тим, що згадані засоби обробки (МТ) установлюються для вироблення сигналу про порушення у випадку визначення амплітуди, яка вища амплітуди, що має порогову величину.
31. Прилад за будь-яким з пп. 19-30, який відрізняється тим, що він містить екран (EC) дисплея, призначений для виведення на нього щонайменше деяких згаданих карт, складених згаданими засобами обробки (МТ).
32. Прилад за будь-яким з пп. 19-31, який відрізняється тим, що кожний контактний датчик (SU) призначений для випромінювання ультразвукових коливань тільки в одному напрямку зі змінним кутом.
33. Прилад за п. 32, який відрізняється тим, що згаданий кут змінюється від приблизно 0° до приблизно 70° відносно поздовжнього або поперечного напрямку.
34. Прилад за будь-яким з пп. 19-31, який відрізняється тим, що кожний контактний датчик (SU) стосується типу фазованої решітки і призначений для випромінювання ультразвукових коливань у напрямках, які знаходяться в вибраному кутовому секторі.
35. Прилад за п. 34, який відрізняється тим, що згаданий кутовий сектор знаходиться у діапазоні від приблизно 0° до приблизно 70° відносно поздовжнього або поперечного напрямку.
Текст
Реферат: Прилад для контролю шворнів осі містить: І) щонайменше один ультразвуковий контактний датчик (SU), призначений для проведення аналізу в вибраному кутовому секторі вибраних ділянок стінки (РА), що має профілі поперечного перерізу з відомими й змінними зовнішніми й внутрішніми радіусами, порожнистого шворня осі (АЕ) і одержання, таким чином, результатів аналізу; II) засоби контролю (МС), призначені для визначення, залежно від згаданих профілів поперечного перерізу й можливих габаритних розмірів і умов експлуатації згаданого шворня щонайменше першого й щонайменше другого вибраних місць на зовнішній (SE) або внутрішній (SI) поверхні стінки (РА), де вручну повинен бути розміщений кожний контактний датчик (SU) таким чином, щоб він здійснював аналіз щонайменше першого й щонайменше другого вибраних ділянок згаданої стінки (РА), відповідно щонайменше у першому й щонайменше у другому вибраних кутових секторах, орієнтованих у першому й другому протилежних поздовжньому й поперечному напрямках, і одержував, таким чином, результати аналізу для різних відносних кутових положень згаданого шворня (АЕ) відносно нього (SU) і III) засоби обробки (МТ), призначені для складання на підставі одержаних результатів аналізу карт, що UA 100024 C2 (12) UA 100024 C2 відображають поперечні або поздовжні спрямованості і положення індикації відбитих сигналів усередині згаданої стінки (РА). UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується шворнів осі, які, наприклад, використовуються в галузі залізничної техніки, зокрема, контролю (або перевірки) таких шворнів за допомогою неруйнуючої технології (неруйнуючих технологій). Фахівцям відомо, що деякі шворні осі, зокрема, шворні, яким необхідно витримувати значні навантаження, повинні бути об'єктом неруйнуючого контролю на різних етапах виробництва й обслуговування для забезпечення відповідності міжнародним стандартам. Відомі способи неруйнуючого контролю досить добре пристосовані для повнотілих (монолітних) шворнів осі. Вони ґрунтуються в основному на акустичному аналізі, здійснюваному за допомогою ультразвукових контактних датчиків, а також, можливо, на проведенні додаткового аналізу, наприклад, на аналізі поверхні або радіографічному аналізі. До стандартів, яким повинні відповідати повнотілі шворні осі, можна віднести, зокрема, NF EN 13261-2004 - для Європи, ISO 5948-1994 і ISO 6933-1986 - для світового співтовариства, М 101/ 90-А для Сполучених Штатів Америки (Association of American Railroads, AAR), NBR 7947-1989 - для Бразилії й JIS E 4502-12002 - для Японії. На підставі одержаних результатів аналізу є можливість визначити місця знаходження поперечних і поздовжніх дефектів і вад усередині утворюючих шворінь цільних матеріалів і встановити, таким чином, відповідає або не відповідає даний шворінь міжнародним стандартам (на етапі виробництва або обслуговування). Недавно була висунута пропозиція замінити деякі повнотілі (або монолітні) шворні осі порожнистимиа шворнями осі, стінка яких має профіль поперечного перерізу зі змінними внутрішнім і зовнішнім радіусами. Ці нові порожнисті шворні кращі, зокрема, тому, що дозволяють домогтися значного зменшення ваги, як правило, приблизно на 30 %, і збільшення тим самим маси перевезеного вантажу, що приводить до зменшення витрати енергії й, таким чином, забруднення середовища. Але при проведенні такого типу контролю порожнистого шворня осі виникають певні проблеми. Дійсно, через наявність профілю поперечного перерізу зі змінним внутрішнім радіусом представляється складним відрізнити відбиті сигнали, що надходять із кутових зон (або кутів), від сигналів, відбитих від дефектів або вад структури. Крім того, розміри значної кількості таких дефектів і (або) вад менше розмірів дефектів і (або) вад, що зустрічаються в повнотілому шворні, що робить їхнє виявлення ще більш складним з урахуванням невеликих відстаней, які переборюються ультразвуком. І, нарешті, розташування на деяких ділянках порожнистого шворня деяких предметів устаткування, зокрема, коліс (що насаджуються з натягом) і гальмових дисків, для утворення осі також здатне привести до виникнення додаткових конструктивних дефектів і (або) вад і навіть збільшенню розмірів деяких конструктивних вад і дефектів, що утворюються в результаті раніше виконаних операцій гарячої малодоходної й механічної обробки. У зв'язку із цим представляється ще більш необхідним здійснювати контроль цих ділянок і прилягаючих до них зон як під час першого складання, так при проведенні операцій по технічному обслуговуванню (з демонтажем або без демонтажу встаткування (устаткувань) осі). Крім того, представляється складним і навіть неможливим здійснювати цей аналіз на деяких ділянках шворня, коли на останньому встановлене встаткування, з використанням існуючих способів контролю. Таким чином, технічним завданням винаходу є спосіб і прилад для неруйнуючого контролю, що дозволяє вручну здійснювати точний контроль більшої частини й, по можливості, повністю порожнистого шворня осі (або в цілому пустотілого (трубчастого) виробу, утвореного в результаті обертання), у тому числі, коли останній постачений устаткуванням. У зв'язку із цим у ньому пропонується спосіб контролю порожнистого шворня осі, що включає в себе наступні етапи: а) розміщення ручним способом щонайменше одного ультразвукового контактного датчика в першому місці, що вибирається на зовнішній або внутрішній поверхні стінки порожнистого шворня осі, причому ця стінка має профіль поперечного перерізу зі змінними й відомими зовнішніми й внутрішніми радіусами, причому кожне місце вибирається залежно від цих профілів поперечного перерізу й можливих габаритних розмірів і умов експлуатації шворня, потім проведення аналізу за допомогою кожного контактного датчика першої вибраної ділянки стінки в першому вибраному кутовому секторі, орієнтованому в першому поздовжньому або поперечному напрямку, для одержання результатів аналізу для різних відносних кутових положень шворня відносно контактного датчика; b) встановлення вручну щонайменше одного контактного датчика в другому місці, що завжди вибирається залежно від профілів поперечного перерізу й можливих габаритних розмірів і умов експлуатації шворня, потім проведення аналізу за допомогою кожного встановленого контактного датчика другої вибраної ділянки стінки в другому вибраному 1 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 60 кутовому секторі, орієнтованому в другому напрямку, протилежному першому напрямку, для одержання інших результатів аналізу для різних відносних кутових положень шворня відносно контактного датчика; с) складання з одержаних результатів аналізу карт, на яких відображені поперечні або поздовжні спрямованості й положення індикацій відбитих сигналів усередині стінки. У цьому випадку під терміном "індикація відбитого сигналу" варто розуміти інформацію, одержану в стінці шляхом відбиття від границі розділу (матеріал-повітря) або від дефекту або також (структурного) вади. Крім того, у цьому випадку під терміном "дефект" варто розуміти частина стінки, що приводить до утворення відбитого сигналу з амплітудою менше заданої граничної величини, якому, таким чином, не властиво бути основою для вибракування шворня. І, нарешті, у цьому випадку під терміном "вада" варто розуміти частину стінки, що приводить до утворення відбитого сигналу, амплітуда якого більша заданої граничної величини, якому, таким чином, властиво приводити до вибракування шворня. Спосіб відповідно до винаходу може забезпечити одержання результатів відповідно до численних варіантів, деякі з яких щонайменше характерні, можуть поєднуватися один з одним, зокрема: - можна, наприклад, здійснити перший раз етапи а) і с) шляхом розміщення вручну кожного ультразвукового контактного датчика на зовнішній поверхні стінки для складання карт, що відображають положення й спрямованості індикацій відбитих сигналів усередині стінки; потім можна виконати другий раз щонайменше етапи а) і с) шляхом розміщення вручну щонайменше одного ультразвукового контактного датчика на внутрішній поверхні стінки в третьому місці, що вибирається залежно від її профілів поперечного перерізу, а потім досліджувати за допомогою кожного контактного датчика третю вибрану ділянку стінки в третьому вибраному кутовому секторі, орієнтованому щонайменше в одному вибраному поздовжньому або поперечному напрямку, для одержання результатів аналізу для різних відносних кутових положень шворня відносно контактного датчика, і скласти карти, що відображають положення й спрямованості індикацій відбитих сигналів усередині стінки; - можна, наприклад, здійснити щонайменше один раз етапи а) і с) шляхом розміщення вручну кожного ультразвукового контактного датчика на зовнішній або внутрішній поверхні стінки для проведення ультразвукового аналізу в кутовому секторі, орієнтованому в поздовжньому напрямку, і скласти, таким чином, карти, що відображають поперечні спрямованості й положення індикацій відбитих сигналів усередині стінки, потім можна повторно виконати також щонайменше один раз етапи а) і с) шляхом розміщення вручну щонайменше одного ультразвукового контактного датчика на зовнішній або внутрішній поверхні стінки для виконання ультразвукового аналізу в кутовому секторі, орієнтованому в поперечному напрямку, і скласти, таким чином, карти, що відображають поздовжні спрямованості й положення індикацій відбитих сигналів усередині стінки; - після виконання етапу с) можна, наприклад, передбачити етап d), у ході якого проводиться аналіз щонайменше зовнішній поверхні стінки за допомогою іншої технології аналізу, яка відрізняється від технології, що базується на ультразвукових коливаннях, для одержання результатів аналізу для різних відносних кутових положень щонайменше одного контактного датчика відносно шворня, а також, можливо, етап е), у ході якого на підставі цих одержаних результатів аналізу складаються карти, що відображають положення й спрямованості індикацій поверхні стінки. Наприклад, згадана інша технологія аналізу може бути вибрана із числа так званої технології потоку розсіювання й так званої технології вихрових струмів. - після виконання етапу с) можна, наприклад, передбачити етап d), у ході якого проводиться аналіз щонайменше однієї зовнішньої поверхні стінки з використанням технології так званої перевірки намагніченими частинками (або Magnetic Particule Inspection (MPI) – контроль методом магнітного порошку) для одержання результатів аналізу поверхні для різних відносних кутових положень шворня відносно контактного датчика; - можна, наприклад, проводити аналіз кожного з перших, других і, можливо, третіх ділянок стінки шляхом відносного поздовжнього переміщення щонайменше одного контактного датчика відносно шворня й (або) шляхом електронного сканування за допомогою щонайменше одного контактного датчика; - у процесі щонайменше одного з етапів а), b) і d) можна, наприклад, одержати різні відносні кутові положення шворня відносно кожного контактного датчика із числа контактних датчиків, приводячи в обертання кожний контактний датчик відносно цього шворня; - він може включати етап f), у ході якого проводиться порівняння даних карт, одержаних на етапі с), з даними перших еталонних карт, які попередньо були зняті на першому еталонному 2 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 шворні такого ж типу, що й контрольований, але не має вад, для одержання тільки даних, що містять індикації відбитих сигналів, які не були представлені в перших еталонних картах, і складання, таким чином, "корегованих" карт; - він може включати етап g), у ході якого проводиться порівняння даних карт, одержаних на етапі с) або f), з даними других еталонних карт, які були зняті на другому еталонному шворні такого ж типу, що й контрольований, але має відомі вади, для одержання тільки даних, що містять індикації відбитих сигналів з відомими вадами, які були представлені в других еталонних картах, і складання, таким чином, карт вад; - він може включати етап h), у ході якого проводиться порівняння з вибраною амплітудою, що має граничну величину, амплітуд з даними карт, які були одержані на етапі с) або f), для одержання тільки даних, що містять індикації відбитих сигналів, амплітуди яких вище амплітуди, що має граничну величину, і, отже, що повідомляють інформацію про наявність вад, і складання, таким чином, карт вад. У випадку виявлення амплітуди, що вище амплітуди, що має граничну величину, представляється можливим подавати сигнал про порушення. - він може включати етап i), що полягає у виведенні на екран дисплея щонайменше однієї карти; - можуть, наприклад, використовуватися контактні датчики, здатні випромінювати ультразвукові коливання тільки в одному напрямку зі змінним кутом. Наприклад, кут може мінятися приблизно від 0º до приблизно 70º відносно поздовжнього або поперечного напрямку. - як варіант можуть, наприклад, використовуватися контактні датчики типу так званої фазованої решітки (або "phased array"), здатні випромінювати ультразвукові коливання в напрямках, які знаходяться в заданому кутовому секторі. Наприклад, кутовий сектор може становити від приблизно 0° до приблизно 70° відносно поздовжнього або поперечного напрямку. Слід зазначити, що етапи а) -с) повинні виконуватися в такому порядку, однак інші згадані етапи d)-i) не обов'язково повинні здійснюватися в такому порядку. Зокрема, етап i) цілком може випливати після етапу с). У винаході також пропонується прилад для контролю шворня осі, призначений для практичної реалізації представленого вище способу. Цей прилад, зокрема, містить: - щонайменше, один ультразвуковий контактний датчик, призначений для аналізу в вибраному кутовому секторі вибраних ділянок стінки, що має профілі поперечного перерізу з відомими й змінними зовнішніми й внутрішніми радіусами, порожнистого шворня осі й одержання, таким чином, результатів аналізу; - засоби контролю, призначені для визначення залежно від профілів поперченого перетину й можливих габаритних розмірів і умов експлуатації шворня щонайменше першого й щонайменше другого вибраних місць на зовнішній або внутрішній стінці, де вручну повинен бути розміщений кожний контактний датчик таким чином, щоб він здійснював аналіз щонайменше першої й щонайменше другої вибраних ділянок стінки відповідно щонайменше в першому й щонайменше у другому вибраних кутових секторах, орієнтованих у першому й другому протилежних поздовжньому або поперечному напрямках, і одержував, таким чином, результати аналізу для різних відносних кутових положень шворня відносно неї; - засоби обробки, призначені для складання на підставі одержаних результатів аналізу карт, що відображають поперечні або поздовжні спрямованості й положення індикації відбитих сигналів усередині стінки. Даний прилад, відповідно до винаходу, здатний забезпечити одержання результату відповідно до численних варіантів, деякі з яких щонайменше характерні, можуть поєднуватися один з одним, і зокрема: - його засоби контролю можуть бути призначені для визначення перед застосуванням вручну на кожному контактному датчику першого переміщення відносно зовнішньої поверхні стінки для одержання результатів аналізу для різних відносних кутових положень шворня відносно кожного контактного датчика, потім для визначення перед застосуванням вручну щонайменше на одному контактному датчику другого переміщення відносно внутрішньої поверхні стінки для проведення ним аналізу щонайменше третьої вибраної ділянки стінки щонайменше у третьому вибраному кутовому секторі, орієнтованому в вибраному поздовжньому або поперечному напрямку, і для одержання ним, таким чином, інших результатів аналізу для різних відносних кутових положень шворня відносно кожного контактного датчика. У цьому випадку засоби обробки призначені для складання на підставі 3 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 одержаних результатів аналізу карт, що відображають положення й спрямованості індикацій відбитих сигналів усередині стінки; - його засоби контролю можуть бути призначені I) для визначення перед застосуванням вручну на кожному контактному датчику першого переміщення відносно зовнішньої або внутрішньої поверхні стінки для виконання ультразвукового аналізу в кутовому секторі, орієнтованому в поздовжньому напрямку, і для одержання результатів аналізу, на підставі яких засоби обробки складуть карти, що відображають поперечні спрямованості й положення індикацій відбитих сигналів, а потім II) для визначення перед застосуванням вручну на кожному контактному датчику щонайменше другого переміщення відносно зовнішньої або внутрішньої поверхні стінки для виконання їм ультразвукового аналізу в кутовому секторі, орієнтованому в поперечному напрямку, і для одержання ним результатів аналізу, на підставі яких засоби обробки складуть карти, що відображають поздовжні спрямованості й положення індикацій відбитих сигналів; - він може містити засоби аналізу поверхні, призначені для проведення аналізу щонайменше зовнішній поверхні стінки шляхом іншої технології аналізу, що відрізняється від технології, що базується на ультразвукових коливаннях, для одержання результатів аналізу для різних відносних положень шворня відносно контактного датчика. У цьому випадку засоби обробки, можливо, будуть призначені для складання на підставі цих результатів аналізу, одержаних шляхом аналізу поверхні, карт, що відображають положення й спрямованості індикацій поверхні стінки. Наприклад, засоби аналізу поверхні вибираються із числа засобів аналізу потоку розсіювання й засобів аналізу методом вихрових струмів. - він може містити засоби аналізу поверхні, призначені для виконання аналізу щонайменше зовнішньої поверхні стінки шляхом перевірки намагніченими частинками (або MPI) для одержання результатів аналізу поверхні для різних відносних кутових положень шворня відносно контактного датчика; - його засоби контролю можуть бути призначені для здійснення електронного сканування за допомогою щонайменше одного контактного датчика для виконання ним аналізу частини щонайменше перших, других і, можливо, третіх ділянок стінки; - його засоби обробки можутьбути призначені для здійснення порівняння даних карт, знятих з контрольованого шворня, з даними перших еталонних карт, які були одержані на першому еталонному шворні такого ж типу, що й контрольований, але не має вад, для збереження тільки даних, що містять індикації відбитих сигналів, які не представлені в перших еталонних картах, і складання, таким чином, корегованих карт; - його засоби обробки можуть бути призначені для здійснення порівняння даних карт, одержаних на контрольованому шворні, з даними других еталонних карт, які були зняті із другого еталонного шворня такого ж типу, що й контрольований, але що мають відомі вади, для збереження тільки даних, що містять індикації відбитих сигналів з відомими вадами, які були представлені в других еталонних картах, і складання, таким чином, карт вад; - його засоби обробки можуть бути призначені для проведення порівняння c вибраною амплітудою, що має граничну величину, амплітуд з даними карт, які були одержані на контрольованому шворні, і збереження тільки даних, що містять індикації відбитих сигналів, амплітуди яких вище має граничну величину амплітуди, і які повідомляють інформацію про наявність вад, і складання, таким чином, карт вад. Його засоби обробки можуть бути призначені для подачі сигналу про порушення у випадку визначення амплітуди, яка вища амплітуди, що має граничну величину. - він може містити екран дисплея для виведення на нього щонайменше деяких карт, складених його засобами обробки; - кожний контактний датчик, наприклад, може бути призначений для випромінювання ультразвукових коливань тільки в одному напрямку зі змінним кутом, наприклад, від приблизно 0° до приблизно 70° відносно поздовжнього або поперечного напрямку; - як варіант кожний контактний датчик може бути типу фазованої решітки й призначений для випромінювання ультразвукових коливань у напрямках, які знаходяться в вибраному кутовому секторі, наприклад, від приблизно 0° до приблизно 70° відносно поздовжнього або поперечного напрямку. Інші відмітні ознаки й переваги винаходу стануть видні після вивчення нижченаведеного детального опису й прикладених фігур креслення, на яких: Фіг.1 схематично зображує вигляд поздовжнього перетину прикладу порожнистого шворня осі, не оснащеного устаткуванням; 4 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг.2 схематично зображує вид поздовжнього перетину частини прикладу порожнистого шворня осі, оснащеного устаткуванням; Фіг.3 схематично й функціонально зображує приклад практичної реалізації приладу для контролю, відповідно до винаходу; Фіг.4А і 4В схематично зображує два приклади розміщення контактного датчика у двох різних вибраних місцях на зовнішній поверхні частини стінки шворня (вигляд у перспективі) для проведення поздовжнього аналізу; Фіг.5 схематично зображує приклад розміщення контактного датчика в вибраному місці на зовнішній поверхні частини стінки шворня (вигляд у перспективі) для проведення поперечного аналізу; Фіг.6 схематично зображує приклад розміщення контактного датчика в вибраному місці внутрішньої поверхні частини стінки шворня (вигляд у перспективі) для проведення поздовжнього аналізу; Фіг.7А-7С зображують перші ділянки частини стінки, зверху яких розміщені три мононаправлених контактних датчики, що переміщаються в поздовжньому напрямку праворуч ліворуч, для кутів випромінювання, які дорівнюють, відповідно, 30°, 45° і 60°, орієнтованих у першому поздовжньому напрямку; Фіг.8А-8С зображують другі ділянки частини стінки, показаної на фіг.7А-7С, зверху який розміщені три аналогічних мононаправленних контактних датчики, що переміщаються в поздовжньому напрямку ліворуч праворуч, для кутів випромінювання, рівних, відповідно, 30°, 45° і 60°, орієнтованих у другому поздовжньому напрямку; Фіг.9А и 9В зображують перші й другі ділянки частини стінки, показаної на фіг.7А-7С, зверху який розміщені три контактних датчики типу фазованої решітки для кутів випромінювання від 30° до 70°, орієнтованих, відповідно, у перших і другому поздовжньому напрямках; Фіг.10 зображує третю ділянку частини стінки, зверху якої на внутрішній поверхні розміщений контактний датчик типу фазованої решітки для кутового сектора від 30° до 70°, орієнтованого в поздовжньому напрямку; Фіг.11А і 11В зображують два приклади карт, одержуваних на одній і тій же стінці шворня осі. Прикладені фігури креслення можуть не тільки служити як доповнення до винаходу, але також, якщо буде потреба, сприяти розумінню його опису. Метою винаходу є забезпечення ручного неруйнуючого контролю більшої частини й, по можливості, повністю порожнистого шворня осі, у тому числі, коли на останньому встановлене устаткування. Надалі вважається, що контрольовані порожнисті шворні призначені для використання як складені елементи осей вантажних або пасажирських вагонів. Однак, винахід не обмежується таким застосуванням. Він стосується в дійсності всіх типів пустотілих (трубчастих) виробів, утворених у результаті обертання, які піддаються впливу експлуатаційних навантажень, наприклад, навантажень до втомлюваної напруги, і стінка яких має профіль поперечного перерізу з відомими й змінними зовнішніми й внутрішніми радіусами. Як це показано на фіг.1, порожнистий шворінь (осі) АЕ містить стінку РА, що визначається за допомогою операцій гарячої малодохідної й механічної обробки й має в остаточному підсумку профілі поперечного перерізу зі змінними зовнішнім R1 і внутрішнім R2 радіусами. Слід зазначити, що радіальна товщина (тобто в напрямку, перпендикулярному поздовжньої осі ХХ) не обов'язково є постійною. Інакше кажучи, профілі поперечного перерізу із зовнішнім R1 і внутрішнім R2 радіусами не обов'язково накладаються в близькій гомотетії. Ручний контроль шворня даного типу незалежно від того, чи оснащений він устаткуванням EQ (зокрема, колесами й (або) гальмовими дисками), як це показано в прикладі, зображеному на фіг.2, навіть у тому випадку, якщо устаткування вже встановлене на вагоні, або шворінь не оснащений устаткуванням, як це показано в прикладі, зображеному на фіг.1, здійснюється за допомогою приладу для контролю аналогічного типу, схематично й функціонально представленого на фіг.3. Такий прилад містить щонайменше один ультразвуковий контактний датчик SU (у цьому випадку зображено сім одиниць), один контрольний блок МС і один блок обробки МТ, а також, переважно, один дисплей ЕС. Слід зазначити, що контрольний блок МС, блок обробки МТ і дисплей ЕС можуть входити до складу мікро-евм (або робочої станції) МО, приєднаної до контактних датчиків SU, як це показано як приклад, що не має обмежувального характеру, на фіг.3. Надалі вважається, що прилад містить щонайменше два контактних датчики SU. Ультразвукові контактні датчики SU можуть бути встановлені для випромінювання ультразвукових коливань тільки в одному напрямку, кут якого заданий, але може мінятися якщо буде потреба, або належати до типу так званої фазованої решітки ("phased array"), тобто 5 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 60 встановлюватися для випромінювання ультразвукових коливань у декількох напрямках, що знаходяться у кутовому секторі, що вибирається залежно від потреб (завдяки кутовому електронному скануванню). Представляється також можливим одержати еквівалент переміщення в поздовжньому напрямку датчика за допомогою електронного сканування. У першому (мононаправленому) випадку кожний контактний датчик SU містить один елемент виявлення, призначений для прийому відбитих від стінки РА сигналів, що є предметом аналізу. У другому випадку (контактного датчика типу фазована решітка) кожний контактний датчик SU містить кілька елементів виявлення, призначених для прийому відбитих від стінки РА, що є предметом аналізу сигналів після їхньої променезаломлюваності й (або) відбиття (можливо, багаторазового) під різними кутами. Варто нагадати, що елементи виявлення, як правило, виконуються з композитного матеріалу й установлюються на трансдукторах. Піддані порушенню елементи виявлення контактного датчика формують розбіжний аналізуючий пучок. Форма останнього і його загальний напрямок нахилу можуть бути змінені електронним способом шляхом уведення часових затримок на рівні моментів порушення вибраних елементів виявлення контактного датчика. "Віртуальним контактним датчиком" звичайно називають сполучення елементів виявлення контактного датчика й можливих відповідних часових затримок, які застосовуються для формування пучка, що аналізує, у загальному заданому напрямку. Контактний датчик типу фазована решітка можуть, таким чином, являти собою множину (наприклад, кілька десятків) віртуальних контактних датчиків залежно від комбінацій, предметом яких він є. Частота порушення трансдукторів звичайно становить близько декількох мегагерц (2-5 Мгц). Ці ж елементи виявлення у випадку, якщо вони не порушені шляхом випромінювання, служать для вловлювання сигналів, відбитих від границі розділу матеріалповітря або матеріал-рідина, що свідчать про наявність дефектів і вад. Вони утворюють, таким чином, вимірювальні перетворювачі типу передачі/прийому. Профіль поперечного перерізу із внутрішнім R2 і зовнішнім R1 радіусами, які має стінка РА, а також можливі габаритні розміри й умови експлуатації шворня АЕ аналізуються, наприклад, за допомогою програмного забезпечення моделювання типу CIVA 8.0 (розроблене й поширюється в торговельних мережах Комісаріатом з атомної енергії, СЕА) для визначення кількості контактних датчиків SU, які будуть необхідні для проведення аналізу в повному обсязі або тільки вибраній частині шворня АЕ з обліком їх типу (мононаправленого або типу фазованої решітки, а в другому випадку - кількості елементів виявлення), а також того, що вони можуть бути орієнтовані для здійснення поздовжніх або поперечних аналізів у протилежних першому й другому напрямках. У цьому випадку під терміном "поздовжній аналіз" варто розуміти аналіз, здійснюваний для пошуку вад і (або) дефектів, орієнтованих, переважно, у поздовжньому напрямку або що мають невеликий кут нахилу відносно поздовжнього напрямку ХХ (гострий кут, як правило, становить менше ±25°, переважно, менше ±5°). Іноді використовується термін похилості положення для позначення такої спрямованості вади. Цей аналіз здійснюється за допомогою пучка, що випускається в напрямку, перпендикулярному поздовжньому напрямку ХХ, тобто загальний напрямок якого по суті продовжує поширюватися в площині, перпендикулярної поздовжньому напрямку ХХ, або також становить невеликий гострий кут (як правило, менше ±10°) із цим перпендикулярним напрямком. Крім того, у цьому випадку під терміном "поперечний аналіз" варто розуміти аналіз, здійснюваний для пошуку вад і (або) дефектів, орієнтованих, переважно, у поперечному напрямку або що мають невеликий кут нахилу відносно площини, перпендикулярної поздовжньому напрямку ХХ (гострий кут, як правило, становить менше ±25°, і, переважно, менше ±5°). Іноді використовується термін похилості для позначення такої спрямованості вади. Цей аналіз здійснюється за допомогою пучка, що випускається в напрямку, паралельному поздовжньому напрямку ХХ, тобто загальний напрямок якого по суті продовжує поширюватися в площині, у якій властиво розташовується поздовжній напрямок ХХ, або також становить невеликий гострий кут (як правило, менше ±10°) із цим поздовжнім напрямком. Крім того, у цьому випадку під терміном "умови експлуатації шворня" варто розуміти вміст простору, що оточує його при проведенні контролю. Дійсно, буде зрозуміло, що коли необхідно здійснювати контроль шворня АЕ, установленого на вагоні, що, у свою чергу, розташований на рейках, то ділянки, які можна буде контролювати, можуть бути значно меншими. З урахуванням форм профілів поперечного перерізу із внутрішнім R2 і зовнішнім R1 радіусами, які, як правило, утворюють стінку РА шворня АЕ, а також можливих габаритних розмірів і умов експлуатації останніх кут випромінювання мононаправленого контактного датчика SU звичайно повинен мати можливість мінятися від приблизно 0° до приблизно 70° відносно поздовжнього напрямку ХХ, а кутовий сектор випромінювання контактного датчика SU 6 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 60 типу фазована решітка, як правило, повинен бути знаходиться у діапазоні від приблизно 0° до приблизно 70° відносно поздовжнього напрямку ХХ. Після визначення контрольним блоком МС для кожного контактного датчика SU (першого) вибраного місця, у якому він повинен бути спочатку й вручну розміщений відносно шворня АЕ для проведення аналізу першої вибраної ділянки стінки РА в першому вибраному кутовому секторі, орієнтованому в першому поздовжньому або поперечному напрямку, а також, можливо, (другого) вибраного місця, у якому він повинен бути надалі вручну розміщений відносно шворня АЕ для проведення аналізу другої вибраної ділянки стінки РА в другому вибраному кутовому секторі, орієнтованому в другому поздовжньому або поперечному напрямку, протилежному першому напрямку, представляється можливим вручну розташувати контактні датчики SU у їх відповідних вибраних перших місцях. Таке розміщення ручним способом контактних датчиків SU відносно шворня АЕ залежно від потреб (і конфігурації шворня АЕ) може здійснюватися в перших вибраних місцях, розташованих або на зовнішній поверхні SE стінки РА, або на внутрішній поверхні SI цієї стінки РА. Наприклад, можна починати із проведення аналізів за допомогою ультразвукових коливань шляхом розміщення контактних датчиків SU на зовнішній поверхні SE стінки РА, а потім, можливо, доповнити ці аналізи шляхом розміщення надалі контактних датчиків SU на внутрішній поверхні SI стінки РА, тобто усередині порожнистого шворня АЕ. Однак, зворотний порядок також можливий. З'єднання контактних датчиків SU із внутрішньою SI або зовнішньою SE поверхнею стінки РА може бути виконане будь-якими відомими фахівцям засобами, зокрема, за допомогою гліцерину або шляхом занурення у воду, переважно, змішану з антикорозійною речовиною. На фіг.4А і 4В зображені два приклади розміщення контактного датчика SU у двох вибраних місцях зовнішньої поверхні SE частини стінки РА шворня АЕ для проведення поздовжнього аналізу. На фіг.5 також зображений приклад розміщення контактного датчика SU в вибраному місці зовнішньої поверхні SE частини стінки РА шворня АЕ для проведення поперечного аналізу. На фіг.6 також зображений приклад розміщення контактного датчика SU в вибраному місці внутрішньої поверхні SI частини стінки РА шворня АЕ для проведення поздовжнього аналізу. Важливо відзначити, що контактний датчик SU може проводити аналіз виділеної для нього ділянки або шляхом її утримання на рівні вибраного місця, або шляхом її переміщення фахівцем вручну в поздовжньому й (або) поперечному напрямку між вихідним положенням (відповідає спочатку вибраному положенню) і кінцевим положенням (відповідає іншому вибраному положенню), можливо, із проходженням одного або декількох проміжних положень (кожне відповідає іншому вибраному місцю). Замість переміщення ручним способом або також на додаток до такого переміщення деякі контактні датчики SU можуть застосовуватися в режимі електронного сканування під контролем контрольного блоку МС для здійснення аналізу частини щонайменше ділянок стінки РА. Варто нагадати, що електронне сканування забезпечується контактним датчиком SU шляхом використання деяких з його елементів виявлення, розташованих в вибраних осередках його фазованої решітки, і шляхом виділення для цих вибраних елементів виявлення заданих затримок для здійснення послідовного випромінювання. Такий режим "електронного" переміщення є переважним, оскільки він виключає необхідність переміщення вручну контактного датчика SU. Контрольний блок МС призначений для визначення, залежно від внутрішнього й зовнішнього профілів поперечного перерізу контрольованого шворня АЕ й можливих габаритних розмірів і умов експлуатації останнього щонайменше перших і других вибраних місць на зовнішній SE або внутрішній SI поверхні стінки РА, де повинні бути розміщені вручну контактні датчики SU для проведення ними аналізу перших і других вибраних ділянок стінки РА, відповідно, у першому й другому вибраному кутовому секторах, орієнтованих у протилежних перший і другому поздовжніх (напрямок ХХ) або поперечних (напрямок, перпендикулярний напрямку ХХ) напрямках, і для одержання ними, таким чином, результатів аналізу для різних відносних кутових положень шворня АЕ відносно контактних датчиків SU. Слід зазначити, що використовуване для здійснення аналізу усієї вибраної ділянки стінки РА рішення залежить від типу наявного в розпорядженні контактного датчика SU, а у випадку застосування контактних датчиків типу фазована решітка, крім того, і від кількості утворюючих її елементів виявлення. Дійсно, далі буде зрозуміло, що, якщо кількість елементів виявлення контактного датчика SU забезпечує покриття виділенї для них ділянки стінки РА, то відсутня необхідність передбачати ручне поздовжнє переміщення, оскільки воно може бути замінено електронним скануванням. Наприклад, якщо контактному датчику SU необхідно покривати 7 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 60 ділянку стінки РА, витягнутий у поздовжньому напрямку на відстань, яка дорівнює 100 мм, то він повинен містити щонайменше 200 елементів виявлення зі стороною 0,5 мм, розділені попарно, наприклад, на відстань, яка дорівнює приблизно 0,1 мм. Варто нагадати, що чим менше розміри елементів виявлення, тим ширше можуть бути аналізовані кутові сектори. Можна знайти компромісне рішення між кількістю елементів виявлення контактних датчиків SU і надаваними електронним скануванням можливостями збільшення покриття для виключення поздовжніх переміщень, здійснюваних ручним способом. Слід також зазначити, що застосування контактних датчиків типу фазована решітка є більше переважним, ніж використання мононаправлених контактних датчиків, оскільки воно дозволяє домогтися кращої цілісності в тому самому аналізованому кутовому секторі, крім при цьому необхідність будь-якого кутового переміщення джерела ультразвукових коливань. Відповідно до винаходу, після розміщення вручну контактних датчиків SU на зовнішній SE або внутрішній SI поверхні стінки РА в перших місцях (вибрані залежно від їх профілів поперечного перерізу й можливих габаритних розмірів і умов експлуатації шворня АЕ) кожний із цих контактних датчиків SU приступає до проведення аналізу першої ділянки стінки РА, що для нього була визначена контрольним блоком МС, у першому вибраному кутовому секторі, орієнтованому в першому поздовжньому або поперечному напрямку. Кожний контактний датчик SU може, таким чином, одержувати результати аналізу, дійсні для поточного відносного кутового положення шворня АЕ відносно згаданого контактного датчика SU. Здійснюючи кутове переміщення контактних датчиків SU відносно шворня АЕ в вибраних послідовних кутових секторах, кожний контактний датчик SU може забезпечувати одержання нових результатів аналізу після виконання кожного кутового переміщення. Таким чином, є можливість розташовувати результат аналізу відносно цілісності периметра кожного першого ділянки стінки, що перевіряється, РА. Ці результати аналізу містять, наприклад, кути випромінювання, моменти випромінювання й прийому ультразвукових коливань (або, що є рівнозначним, часові інтервали між моментами випромінювання й прийому) і кути прийому. Вони передаються, наприклад, контактними датчиками SU у контрольний блок МС, що зобов'язаний їх розмістити в пам'яті MY відповідно до поздовжніх і кутових положень перших ділянок, що перевіряються, відносно вибраної системи відліку, а також, можливо, ідентифікатора використовуваного для їх одержання контактного датчика SU. Далі щонайменше деякі контактні датчики SU вручну розміщаються на зовнішній SE або внутрішній SI поверхні стінки РА в других місцях (вибрані залежно від їх профілів поперечного перерізу й можливих габаритних розмірів і умов експлуатації шворня АЕ) для того, щоб вони приступилися до проведення аналізу других ділянок стінки РА, які для них відповідним чином були визначені, у других вибраних кутових секторах, орієнтованих у другому поздовжньому або поперечному напрямку, протилежному першому напрямку. Наприклад, якщо перший напрямок відповідає напрямку, що випливає ліворуч праворуч уздовж поздовжньої осі ХХ, той другий напрямок відповідає напрямку, що випливає праворуч ліворуч уздовж згаданої поздовжньої осі ХХ. Аналогічним чином, якщо перший напрямок відповідає напрямку, що випливає ліворуч праворуч уздовж другої осі, перпендикулярної поздовжньої осі ХХ, той другий напрямок відповідає напрямку, що випливає праворуч ліворуч згаданої другої осі. Кожний розміщений вручну контактний датчик SU може, таким чином, одержувати результати аналізу, дійсні для його поточного відносного кутового положення відносно шворня АЕ в вибраних послідовних кутових секторах, причому кожний контактний датчик SU може забезпечувати одержання нових результатів аналізу після здійснення кожного кутового переміщення. Таким чином, є можливість розташовувати результат аналізу відносно цілісності периметра кожного другого ділянки стінки, що перевіряється, РА. Ці результати аналізу передаються, наприклад, контактними датчиками SU у контрольний блок МС, що зобов'язаний їх розмістити в пам'яті MY відповідно до поздовжніх і кутових положень других ділянок, що перевіряються, відносно вибраної системи відліку, а також, можливо, ідентифікатора використовуваного для їхнього одержання контактного датчика SU. Як це треба з фіг.7-10, такий подвійний аналіз, виконуваний у протилежних напрямках, дозволяє перевіряти (по необхідності) повністю або тільки частину шворня осі АЕ. Зокрема, Фіг.7А-7С зображують перші ділянки частини стінки, які можуть бути покриті трьома мононаправленими контактними датчиками, які розміщаються на зовнішній SE поверхні й переміщаються в поздовжньому напрямку праворуч ліворуч, для кутів випромінювання, які дорівнююють, відповідно, 30°, 45° і 60°, орієнтованих у першому поздовжньому напрямку (треба праворуч ліворуч); 8 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг.8А-8С зображують другі ділянки цієї ж частини стінки, які можуть бути покриті трьома такими ж мононаправленими контактними датчиками, які розміщаються на зовнішній SE поверхні й переміщаються в поздовжньому напрямку ліворуч праворуч, для кутів випромінювання, які дорівнюють, відповідно, 30°, 45° і 60°, орієнтованих у другому поздовжньому напрямку (треба ліворуч праворуч); Фіг.9А зображує перші ділянки цієї ж частини стінки, які можуть бути покриті трьома контактними датчиками типу фазована решітка, які розміщаються на зовнішній SE поверхні, для кута випромінювання, що знаходиться в діапазоні від 30° до 70°, орієнтованого в першому поздовжньому напрямку (треба праворуч ліворуч); Фіг.9В зображує другі ділянки цієї ж частини стінки, які можуть бути покриті трьома такими ж контактними датчиками типу фазована решітка, які розміщаються на зовнішній SE поверхні, для кута випромінювання, що знаходиться в діапазоні від 30° до 70°, орієнтованого в другому поздовжньому напрямку (треба ліворуч праворуч); Фіг.10 зображує треті ділянки цієї ж частини стінки, які можуть бути покриті одним контактним датчиком типу фазована решітка, що розміщається на внутрішній поверхні SI, для кута випромінювання, що знаходиться в діапазоні від 30° до 70°, орієнтованого в поздовжньому напрямку (треба ліворуч праворуч). З урахуванням форм профілів поперечного перерізу із внутрішнім R2 і зовнішнім R1 радіусами, які, як правило, утворюють стінку РА шворня АЕ, а також можливих габаритних розмірів і умов експлуатації останніх кут випромінювання мононаправленого контактного датчика SU звичайно повинен мати можливість мінятися від приблизно 0° до приблизно 70° відносно поздовжнього ХХ або поперечного напрямку, а кутовий сектор випромінювання контактного датчика SU типу фазована решітка, як правило, повинен бути знаходиться у діапазоні від приблизно 0° до приблизно 70° відносно поздовжнього ХХ або поперечного напрямку. Кожна стрілка з подвійним напрямком, зображена на фіг.7-10, показує поздовжнє збільшення (першої) ділянки, аналіз якої проводиться за допомогою контактного датчика SU (розміщений зверху). Далі буде зрозуміло, що габаритний розмір і (або) умови експлуатації шворня осі АЕ значно зменшує (зменшують) у деяких його частинах поздовжнє збільшення ділянок, які технічно можуть бути проаналізовані (покриті) тим самим контактним датчиком SU. Зокрема, це стосується частин, розташованим під колесами, у яких є більша ймовірність наявності структурних вад, обумовлених необхідністю насадження з натягом і (або) стерпними навантаженнями, і які, таким чином, повинні бути предметом, по можливості, найбільш точної й повної перевірки (аналізу). Дані аналізу, що зберігаються, витягають за допомогою блоку обробки МТ, що зобов'язаний, таким чином, здійснити їхнє групування відповідно до зон шворня, до яких вони ставляться, для складання карт, які відображають поперечні або поздовжні спрямованості й положення індикації відбитих сигналів усередині стінки РА. Слід зазначити, що індикації відбитих сигналів є результатом відбиття або від границі розділу матеріал-повітря або матеріал-вода, або від дефекту, або також від вади. Також слід зазначити, що поздовжні аналізи особливо пристосовані для виявлення поперечних дефектів і вад, які, як правило, найбільш часто зустрічаються, у той час як поперечні аналізи особливо пристосовані для виявлення поздовжніх дефектів і вад. Факт проведення перевірки матеріалів у двох протилежних один одному напрямках і, таким чином, у вкрай різних напрямках проведення аналізу дозволяє виявляти дефекти й вади більш маленьких розмірів і у зв'язку із цим більшу кількість дефектів і вад, ніж із застосуванням способів і приладів для контролю попереднього рівня техніки, які призначені для повнотілих (або монолітних) шворнів. Але це також дозволяє забезпечити гарне виявлення усередині стінки РА дефектів і вад, що мають нахилену й скошену форму (або "tiltes"). Слід зазначити, що блок обробки МТ може, якщо буде потреба, установлюватися таким чином, щоб проводити "зіставлення" відносних результатів аналізу в ідентичних зонах, що представляють собою зони покриття першої (перших) і (або) другої (других) ділянок стінки. Таким чином, вони можуть становити "чорнові" карти цих зон покриття, можливо, тривимірного типу (3D). Масиви даних, утворюючих "чорнові" карти, переважно, заносяться на згадку MY. Таким чином, ці карти можуть або виводитися на екран ЕС дисплея в індивідуальному порядку (одна за іншою) або згрупованими (трохи в те саме час) для проведення аналізу фахівцем, або спочатку автоматично аналізуватися, а потім перетворюватися в "кореговані" карти або карти "вад", які можуть бути виведені на екран ЕС дисплея в індивідуальному порядку або згрупованими. 9 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 60 На "чорнових" картах можуть виконуватися численні види порівняльного аналізу. Наприклад, блок обробки МТ може бути призначений для проведення порівняння даних щонайменше деяких карт, які були одержані на контрольованому шворні АЕ, з даними перших еталонних карт, які були зняті на першому еталонному шворні такого ж типу, що й контрольований, але не має вад. У цьому випадку блок обробки МТ зберігає тільки дані, що містять індикації відбитих сигналів, які не були представлені в перших еталонних картах, для складання корегованих карт, які заносяться блоком обробки на згадку MY. Як варіант або доповнення блок обробки МТ може бути призначений для проведення порівняння даних щонайменше деяких карт ("чорнових" або "корегованих"), одержаних на шворні АЕ, з даними других еталонних карт, які були зняті на другому еталонному шворні такого ж типу, що й контрольований, але утримуючу відому вади. У цьому випадку блок обробки МТ зберігає тільки дані, що містять індикації відбитих сигналів з відомими вадами, які представлені в других еталонних картах, для складання карт вад, які заносяться блоком обробки на згадку MY. Як варіант або доповнення блок обробки МТ може бути призначений для проведення порівняння c вибраною амплітудою, що має граничну величину, амплітуд індикацій відбитих сигналів, що утримуються щонайменше на деяких картах. У цьому випадку блок обробки МТ зберігає тільки дані, що містять індикації відбитих сигналів, амплітуди яких вище амплітуди, що має граничну величину, і які у зв'язку із цим, як уважається, мають вади, для складання карт вад. Крім того, може також розглядатися варіант формування блоком обробки МТ сигналу про порушення (звукового й (або) зорового, котрий виводиться на екран ЕС дисплея) щораз, коли МТ буде встановлено, що амплітуда вище амплітуди, що має граничну величину). На фіг.11А і 11В зображені два приклади "чорнових" карт, одержаних на одній і тій же стінці РА шворня осі АЕ. Виявлені структурні вади позначені позицією DS. Як раніше вказувалося, аналіз стінки РА можна зробити шляхом розміщення вручну контактних датчиків SU на зовнішній стороні SE або також на внутрішній стороні SI. Однак представляється також можливим розглянути варіант здійснення подвійного аналізу, наприклад, спочатку шляхом розміщення вручну контактних датчиків SU на зовнішній поверхні SE, потім шляхом розміщення вручну деяких контактних датчиків SU на внутрішній поверхні SI. Якщо бути більше точним, то в цьому випадку контактні датчики SU розміщаються вручну на зовнішній поверхні SE стінки РА в перших вибраних місцях, і за допомогою цих контактних датчиків SU проводиться аналіз перших вибраних ділянок стінки РА в перших вибраних кутових секторах, орієнтованих у першому поздовжньому (або поперечному) напрямку, для одержання результатів аналізу для різних кутових положень контактних датчиків SU відносно шворня АЕ. Потім щонайменше деякі з контактних датчиків SU розміщаються вручну на зовнішній поверхні SE стінки РА в других вибраних місцях, і за допомогою цих контактних датчиків SU проводиться аналіз других вибраних ділянок стінки РА в других вибраних кутових секторах, орієнтованих у другому поздовжньому (або поперечному) напрямку, протилежному першому напрямку, для одержання результатів аналізу для різних кутових положень контактних датчиків SU відносно шворня АЕ. І, нарешті щонайменше деякі з контактних датчиків SU розміщаються вручну на внутрішній поверхні SI стінки РА в третіх вибраних місцях, і за допомогою цих контактних датчиків SU проводиться аналіз третіх вибраних ділянок стінки РА в третіх вибраних кутових секторах, орієнтованих щонайменше в одному поздовжньому (або поперечному) напрямку й навіть у двох протилежних напрямках, для одержання результатів аналізу для різних кутових положень контактних датчиків SU відносно шворня АЕ. Блоком обробки МТ, таким чином, на підставі сукупності результатів аналізу складаються карти, що відображають положення й спрямованості індикацій відбитих сигналів усередині стінки РА. Такий подвійний аналіз, виконуваний із зовнішньої й внутрішньої сторони, може дозволити покрити всю сукупність ділянок стінки, що перевіряються, РА, у той час як це може бути визнано нездійсненним шляхом проведення тільки одного аналізу, здійснюваного із зовнішньої сторони, з урахуванням профілів поперечного перерізу цієї стінки РА й (або) габаритних розмірів і (або) умов експлуатації шворня АЕ. Представляється також можливим провести перший поздовжній аналіз у двох напрямках (як це вказувалося вище) і із зовнішньої сторони (або внутрішньої сторони), а потім другий поперечний аналіз щонайменше в одному напрямку й із зовнішньої сторони (або із внутрішньої сторони) для складання карт, що відображають поперечні спрямованості й положення індикацій відбитих сигналів усередині стінки РА, і карт, що відображають поздовжні спрямованості й положення індикацій відбитих сигналів усередині цієї ж стінки РА. 10 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 60 Представляється також можливим провести перший поздовжній аналіз у двох напрямках і із зовнішньої сторони, а потім другий поперечний аналіз щонайменше в одному напрямку й із внутрішньої сторони. Представляється також можливим провести перший поперечний аналіз у двох напрямках і із внутрішньої сторони, а потім другий аналіз щонайменше в одному напрямку й із зовнішньої сторони. У цілому можуть розглядатися будь-які комбінації поздовжнього (поздовжніх) і поперечного (поперечних) аналізів, проведених із внутрішньої й зовнішньої сторони. Слід зазначити, що для проведення аналізів із внутрішньої сторони в окремих випадках може знадобитися коригувальне розточення щонайменше країв порожнистих шворнів осі АЕ для забезпечення розміщення щонайменше одного контактного датчика SU усередині цього шворня АЕ проти внутрішньої поверхні SI стінки РА, а також його, можливого, переміщення ручним способом. Слід також зазначити, що місця розміщення контактних датчиків SU, різні кути або різні кутові сектори проведення аналізу за допомогою ультразвукових коливань кожного з контактних датчиків SU і ділянки стінки, призначені для різних контактних датчиків, можливо, можуть бути визначені контрольним блоком МС залежно від умови (умов). Таким чином, можна розглядати, що частина контролю буде здійснюватися за допомогою одного пучка, продовження загальної спрямованості якого по суті розташовується в площині, що має, у свою чергу, поздовжній напрямок ХХ, і на ділянках стінки, що містять попарно заданий коефіцієнт покриття, що становить, наприклад, 50 %, і (або) що частина контролю буде здійснюватися за допомогою послідовних пучків, продовження загальної спрямованості яких по суті розташовується в площинах, що утворюють гострі кути з даним поздовжнім напрямком ХХ, які перетинаються під кутами від 0° до +20° і від 0° до -20°. Крім того, кут нахилу елементів виявлення контактного датчика SU може вибиратися залежно від потреби. Як приклад, що не носить обмежувального характеру, може бути вибраний кут в 45° відносно поздовжнього напрямку ХХ. Слід також зазначити, що, як це відомо фахівцям, коефіцієнт підсилення кожного трансдуктора повинен бути предметом коректування на етапі перевірки за еталоном, наприклад, для забезпечення відповідності амплітуди сигналу, одержуваного на першому відбитому сигналі, одержаному від границі розділу стінки РА, амплітуді, яка дорівнює, наприклад, приблизно 50 % загального динамічного діапазону амплітуди, використаної для карт. Крім того, етап перевірки за еталоном також містить, переважно, першу частину, призначену для одержання вищезгаданих еталонних карт, які відображають результати аналізів за допомогою ультразвукових коливань, проведених на еталонному порожньому шворні осі, аналогічного типу, що й шворінь, що буде контролюватися, але неушкодженому, тобто не має структурних дефектів і вад. Ця перша частина етапу перевірки за еталоном дозволяє в дійсності заздалегідь мати відомості про відбиті сигнали, які утворяться в результаті геометричної форми стінки РА (зокрема, кути й у цілому зони, у яких внутрішній R2 або зовнішній R1 радіус істотно міняються) і, таким чином, їх диференціювати від відбитих сигналів, які утворяться структурними дефектами й вадами контрольованого порожнистого шворня осі АЕ. Етап перевірки за талоном може також містити другу частину, призначену для одержання вищезгаданих еталонних карт, які є відбиттям результатів аналізів, виконаних за допомогою ультразвукових коливань на еталонному порожньому шворні осі, аналогічного типу, що й шворінь осі, що повинен стати предметом контролю, але еталон якого містить типові структурні або штучні дефекти (наприклад, характерні насічки або порожнини), в вибраних місцях. Ці типові структурні або штучні дефекти визначені відповідно до технічних умов і (або) стандартів, які закріплюють граничну величину сортування дефектів і вад. Коли амплітуда сигналу, відбитого від природної вади, менше граничної величини сортування, то має місце бути дефект. У зворотному випадку (більше граничної величини) має місце бути вада. Ця друга частина етапу перевірки за еталоном дозволяє в дійсності заздалегідь мати відомості про відбиті сигнали, які утворяться типовими структурними або штучними вадами й, таким чином, мати можливість легше виявляти на картах шляхом порівняння із граничною величиною сортування "об'єкти", які формують відбиті сигнали (або оцінки відбитого сигналу на екрані індикатора) аналогічних типів, що й у контрольованих порожнистих шворнях осі АЕ. Після завершення поздовжнього й (або) поперечного аналізу за допомогою ультразвукових коливань порожнистого шворня осі АЕ надалі представляється можливим здійснити вручну щонайменше один додатковий аналіз іншого типу. Наприклад, можна провести аналіз зовнішньої поверхні SE стінки РА для одержання результатів аналізу поверхні для різних відносних положень шворня АЕ відносно засобів аналізу поверхні. 11 UA 100024 C2 5 10 15 20 25 30 35 Серед можливо використовуваних технологій проведення аналізу можна, зокрема, виділити технологію аналізу так званого потоку розсіювання й технологію аналізу так званих вихрових струмів. Деякі із цих технологій є кращими, оскільки вони надають дані аналізу поверхні, на підставі яких можна скласти карти, що відображають положення й спрямованості вад поверхні стінки РА. Масиви даних, що утворюють карти вад поверхні, переважно, зберігаються в пам'яті MY для того, щоб згадані карти вад поверхні можна було б вивести на екран ЕС дисплея або в індивідуальному порядку (одна за іншою), або згрупованими (трохи в те саме час), можливо, з картами структурних вад (виходять за допомогою ультразвукових коливань) для проведення аналізу фахівцем і (або) зіставлення з картами, одержуваними за допомогою контактних датчиків SU. Це також може дозволити за допомогою приладу зробити автоматичне порівняння карт вад поверхні й карт, одержаних за допомогою ультразвукових коливань. Слід зазначити, що також можна проводити аналіз поверхні типу MPI (Magnetic Particle Inspection - магнітно-порошковий контроль). Варто нагадати, що така технологія полягає в покритті зовнішньої поверхні SE стінки РА намагніченими частинками й проявником, у намагнічуванні перевіряються стінки М, а потім у візуальному спостереженні (неозброєним оком) під ультрафіолетовими променями UV за відхиленнями спрямованості цих намагнічених часток, причому відхилення спрямованості обумовлені присутністю вад або дефектів. Негативною стороною такої технології проведення аналізу поверхні є те, що вона не дозволяє в цей час надавати карти вад поверхні, а також у тому, що вона ґрунтується винятково на візуальному спостереженні фахівця, що здійснює контроль над шворнем АЕ, і вимагає надалі зорового, а не автоматичного візуального порівняння з картами, одержаними за допомогою ультразвукових коливань. Таким чином, виникає залежність від того, як це буде інтерпретовано фахівцем, а також від непередбачених випадків. Слід також зазначити, що карти, які розглядалися раніше, можуть належати до будь-яких відомих фахівцям типам, зокрема, типу A-Scan, B-Scan, C-Scan, D-Scan, S-Scan (або Sector Scan). Як приклад, що носить винятково ілюстративний характер, можна, наприклад, скласти карти типу S-Scan, які надають індикації місця розташування в обсязі - одна карта для кожного положення контактного датчика. Завдяки винаходу представляється можливим виявляти дефекти й вади, що мають товщину приблизно 2 мм (тобто приблизно 5 % номінальної товщини стінки РА в радіальному напрямку), довжину приблизно 5 мм і ширину приблизно 1 мм. Крім того, можуть бути виявлені поздовжні й поперечні дефекти й вади, що мають нахил з гострими кутами, як правило, менше ±25° і, переважно, менше ±5°. Крім того, можуть бути виявлені поздовжні або поперечні порожнини (flaws), які містять кути розходження напрямків (tilt angles), здатні досягати приблизно 60°. Винахід не обмежується прикладами способів і приладу для контролю порожнистих шворнів осі, опис яких наведений раніше тільки як ілюстрація, і охоплює всі варіанти, які можуть бути розглянуті фахівцем у рамках нижченаведеної формули. ФОРМУЛА ВИНАХОДУ 40 45 50 55 1. Спосіб контролю шворнів осі за допомогою ультразвукових контактних датчиків, який відрізняється тим, що він включає в себе наступні етапи: a) розміщення ручним способом щонайменше одного ультразвукового контактного датчика (SU) у першому місці, що вибирають на зовнішній (SE) або внутрішній (SI) поверхні стінки (РА) порожнистого шворня осі (АЕ), причому згадана стінка (РА) має профілі поперечного перерізу зі змінними і відомими зовнішнім і внутрішнім радіусами, причому кожне перше місце вибирають залежно від згаданих профілів поперечного перерізу і можливих габаритних розмірів і умов експлуатації згаданого шворня (АЕ), потім проведення аналізу за допомогою кожного контактного датчика (SU) першої вибраної ділянки згаданої стінки (РА) у першому вибраному кутовому секторі, орієнтованому в першому поздовжньому або поперечному напрямку, для одержання результатів аналізу для різних відносних кутових положень згаданого шворня (АЕ) відносно контактного датчика (SU); b) встановлення вручну щонайменше одного контактного датчика (SU) у другому місці, що вибирають залежно від профілів поперечного перерізу стінки (РА) і згаданих можливих габаритних розмірів і умов експлуатації шворня (АЕ), потім проведення аналізу за допомогою кожного встановленого вручну контактного датчика (SU) другої вибраної ділянки згаданої стінки (РА) у другому вибраному кутовому секторі, орієнтованому в другому напрямку, протилежному згаданому першому напрямку, для одержання інших результатів аналізу для різних відносних кутових положень згаданого шворня (АЕ) відносно контактного датчика (SU); 12 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 60 c) складання з одержаних згаданих результатів аналізу карт, на яких відображені поперечні або поздовжні спрямованості і положення індикацій відбитих сигналів усередині згаданої стінки (РА). 2. Спосіб за п. 1, який відрізняється тим, що здійснюють перший раз етапи а)-с) шляхом розміщення вручну кожного ультразвукового контактного датчика (SU) на зовнішній поверхні (SE) згаданої стінки (РА) для складання карт, що відображають положення і спрямованості індикацій відбитих сигналів усередині згаданої стінки (РА); потім виконуються другий раз щонайменше етапи а) і с) шляхом розміщення вручну щонайменше одного ультразвукового контактного датчика (SU) на внутрішній поверхні (SI) згаданої стінки (РА) у третьому місці, що вибирають залежно від її профілів поперечного перерізу, а потім досліджують за допомогою кожного контактного датчика (SU) третю вибрану ділянку згаданої стінки (РА) у третьому вибраному кутовому секторі, орієнтованому щонайменше в одному вибраному поздовжньому або поперечному напрямку, для одержання результатів аналізу для різних відносних кутових положень шворня (АЕ) відносно контактного датчика (SU), і складають карти, що відображають положення і спрямованості індикацій відбитих сигналів усередині згаданої стінки (РА). 3. Спосіб за будь-яким з пп. 1 і 2, який відрізняється тим, що етапи а)-с) здійснюють щонайменше один раз шляхом розміщення вручну кожного ультразвукового контактного датчика (SU) на зовнішній (SE) або внутрішній (SI) поверхні згаданої стінки (РА) для проведення ультразвукового аналізу в кутовому секторі, орієнтованому в поздовжньому напрямку, і, таким чином, складають карти, що відображають поперечні спрямованості і положення індикацій відбитих сигналів усередині згаданої стінки (РА), потім повторно виконують також щонайменше один раз етапи а)-с) шляхом розміщення вручну щонайменше одного ультразвукового контактного датчика (SU) на зовнішній (SE) або внутрішній (SI) згаданій поверхні стінки (РА) для виконання ультразвукового аналізу в кутовому секторі, орієнтованому в поперечному напрямку, і, таким чином, складають карти, що відображають поздовжні спрямованості і положення індикацій відбитих сигналів усередині згаданої стінки (РА). 4. Спосіб за будь-яким з пп. 1-3, який відрізняється тим, що після виконання етапу с) передбачають етап d), у ході якого проводять аналіз щонайменше зовнішньої (SE) поверхні згаданої стінки (РА) за допомогою іншої технології аналізу, що відрізняється від технології, яка базується на ультразвукових коливаннях, для одержання результатів аналізу для різних відносних кутових положень щонайменше одного контактного датчика (SU) відносно згаданого шворня (АЕ). 5. Спосіб за п. 4, який відрізняється тим, що після виконання етапу d) передбачають етап e), у ході якого на підставі цих одержаних результатів аналізу складають карти, що відображають положення і спрямованості індикацій поверхні згаданої стінки (PA). 6. Спосіб за будь-яким з пп. 4 і 5, який відрізняється тим, що згадану іншу технологію аналізу вибирають із групи, що включає технологію так званого потоку розсіювання і технологію так званих вихрових струмів. 7. Спосіб за будь-яким з пп. 1-4, який відрізняється тим, що після виконання етапу с) передбачають етап d), у ході якого проводять аналіз щонайменше однієї зовнішньої (SE) поверхні згаданої стінки (РА) з використанням технології так званої перевірки намагніченими частинками (або МРІ) для одержання результатів аналізу поверхні для різних відносних кутових положень згаданого шворня (АЕ) відносно контактного датчика (SU). 8. Спосіб за будь-яким з пп. 1-7, який відрізняється тим, що проводять аналіз кожної з перших, других і, можливо, третіх ділянок згаданої стінки шляхом відносного поздовжнього переміщення щонайменше одного контактного датчика (SU) відносно згаданого шворня (АЕ) і/або шляхом електронного сканування за допомогою щонайменше одного контактного датчика (SU). 9. Спосіб за будь-яким з пп. 1-8, який відрізняється тим, що в процесі щонайменше одного з етапів а), b) і d) досягають різних відносних кутових положень згаданого шворня (АЕ) відносно кожного контактного датчика (SU), приводячи вручну в обертання кожний контактний датчик (SU) відносно згаданого шворня (АЕ). 10. Спосіб за будь-яким з пп. 1-9, який відрізняється тим, що він включає етап f), у ході якого проводять порівняння даних карт, одержаних на етапі с), з даними перших еталонних карт, які були зняті на першому еталонному шворні такого ж типу, що і контрольований, але не має вад, для одержання тільки даних, що містять індикації відбитих сигналів, які не представлені в згаданих перших еталонних картах, і складання, таким чином, корегованих карт. 11. Спосіб за будь-яким з пп. 1-10, який відрізняється тим, що він включає етап g), у ході якого проводять порівняння даних карт, одержаних на етапі с) або f), з даними других еталонних карт, які були зняті на другому еталонному шворні такого ж типу, що і контрольований, але має відомі вади, для одержання тільки даних, що містять індикації відбитих сигналів з відомими вадами, які були представлені в других згаданих еталонних картах, і складання, таким чином, карт вад. 13 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 60 12. Спосіб за будь-яким з пп. 1-11, який відрізняється тим, що він включає етап h), у ході якого проводять порівняння з вибраною амплітудою, що має порогову величину, амплітуд з даними карт, які були одержані на етапі с) або f), для одержання тільки даних, що містять індикації відбитих сигналів, амплітуди яких вищі згаданої амплітуди, що має порогову величину і повідомляє інформацію про наявність вад, і складання, у такий спосіб, карт вад. 13. Спосіб за п. 12, який відрізняється тим, що у випадку виявлення амплітуди, яка вища згаданої амплітуди, що має порогову величину, виробляють сигнал про порушення. 14. Спосіб за будь-яким з пп. 1-13, який відрізняється тим, що він включає етап і), у ході якого на екран (EC) дисплея виводять щонайменше одну карту. 15. Спосіб за будь-яким з пп. 1-14, який відрізняється тим, що використовують контактні датчики (SU), виконані з можливістю випромінювання ультразвукових коливань тільки в одному напрямку зі змінним кутом. 16. Спосіб за п. 15, який відрізняється тим, що згаданий кут міняється від приблизно 0° до приблизно 70° відносно поздовжнього або поперечного напрямку. 17. Спосіб за будь-яким з пп. 1-14, який відрізняється тим, що використовують контактні датчики (SU) типу так званої фазованої решітки, виконані з можливістю випромінювання ультразвукових коливань у напрямках, які знаходяться в заданому кутовому секторі. 18. Спосіб за п. 17, який відрізняється тим, що згаданий кутовий сектор становить від приблизно 0° до приблизно 70° відносно поздовжнього або поперечного напрямку. 19. Прилад для контролю шворнів осі, який відрізняється тим, що він містить: І) щонайменше один ультразвуковий контактний датчик (SU), установлюваний для проведення аналізу в вибраному кутовому секторі вибраних ділянок стінки (РА), що має профілі поперечного перерізу з відомими і змінними зовнішнім і внутрішнім радіусами, порожнистого шворня осі (АЕ), і одержання, таким чином, результатів аналізу; II) засоби контролю (МС), установлювані для визначення, залежно від згаданих профілів поперечного перерізу і можливих габаритних розмірів і умов експлуатації згаданого шворня, щонайменше першого і щонайменше другого вибраних місць на зовнішній (SE) або внутрішній (SI) поверхні стінки (РА), де вручну повинен бути розміщений кожний контактний датчик (SU) таким чином, щоб він здійснював аналіз щонайменше першої і щонайменше другої вибраних ділянок згаданої стінки (РА), відповідно щонайменше у першому і щонайменше у другому вибраних кутових секторах, орієнтованих у першому і другому протилежних поздовжньому і поперечному напрямках, і одержував, таким чином, результати аналізу для різних відносних кутових положень згаданого шворня (АЕ) відносно нього (SU), і III) засоби обробки (МТ), установлювані для складання на підставі одержаних результатів аналізу карт, що відображають поперечні або поздовжні спрямованості і положення індикації відбитих сигналів усередині згаданої стінки (РА). 20. Прилад за п. 19, який відрізняється тим, що згадані засоби контролю (МС) установлюються для визначення перед застосуванням вручну на кожному контактному датчику (SU) першого переміщення відносно зовнішньої (SE) поверхні згаданої стінки (РА) для одержання результатів аналізу для різних відносних кутових положень згаданого шворня (АЕ) відносно контактного датчика (SU), потім для визначення перед застосуванням вручну щонайменше на одному контактному датчику (SU) другого переміщення відносно внутрішньої (SI) поверхні згаданої стінки (РА) для проведення ним аналізу щонайменше третьої вибраної ділянки згаданої стінки (РА) щонайменше у третьому вибраному кутовому секторі, орієнтованому в вибраному поздовжньому або поперечному напрямку, і для одержання ним, таким чином, інших результатів аналізу для різних відносних кутових положень згаданого шворня (АЕ) відносно контактного датчика (SU), а також тим, що згадані засоби обробки (МТ) установлюються для складання на підставі згаданих одержаних результатів аналізу карт, що відображають положення і спрямованості індикацій відбитих сигналів усередині згаданої стінки (РА). 21. Прилад за будь-яким з пп. 19 і 20, який відрізняється тим, що згадані засоби контролю (МС) установлюються І) для визначення перед застосуванням вручну на кожному контактному датчику (SU) першого переміщення відносно зовнішньої (SE) або внутрішньої (SI) поверхні згаданої стінки (РА) для виконання ультразвукового аналізу в кутовому секторі, орієнтованому в поздовжньому напрямку, і для одержання результатів аналізу, на підставі яких згадані засоби обробки (МТ) складуть карти, що відображають поперечні спрямованості і положення індикацій відбитих сигналів, а потім II) для визначення перед застосуванням вручну на кожному контактному датчику (SU) щонайменше другого переміщення відносно зовнішньої (SE) або внутрішньої (SI) поверхні згаданої стінки (РА) для виконання ним ультразвукового аналізу в кутовому секторі, орієнтованому в поперечному напрямку, і для одержання ним результатів аналізу, на підставі яких згадані засоби обробки (МТ) складуть карти, що відображають поздовжні спрямованості і положення індикацій відбитих сигналів. 14 UA 100024 C2 5 10 15 20 25 30 35 40 45 50 55 22. Прилад за будь-яким з пп. 19-21, який відрізняється тим, що він містить засоби аналізу поверхні, установлювані для проведення аналізу щонайменше зовнішньої (SE) поверхні згаданої стінки (РА) шляхом іншої технології аналізу, що відрізняється від технології, яка базується на ультразвукових коливаннях, для одержання результатів аналізу для різних відносних положень згаданого шворня (АЕ) відносно кожного контактного датчика (SU). 23. Прилад за п. 22, який відрізняється тим, що згадані засоби обробки (МТ) установлюються для складання на підставі згаданих результатів аналізу, одержаних за допомогою згаданих засобів аналізу поверхні (MAS), карт, що відображають положення і спрямованості індикацій поверхні згаданої стінки (РА). 24. Прилад за будь-яким з пп. 22 і 23, який відрізняється тим, що згадані засоби аналізу поверхні вибираються в групі, що включає засоби аналізу потоку розсіювання і засоби аналізу методом вихрових струмів. 25. Прилад за будь-яким з пп. 19-24, який відрізняється тим, що він містить засоби аналізу поверхні, установлювані для виконання аналізу щонайменше зовнішньої (SE) поверхні згаданої стінки (РА) шляхом перевірки намагніченими частинками (або МРІ) для одержання результатів аналізу поверхні для різних відносних кутових положень згаданого шворня (АЕ) відносно згаданих контактних датчиків (SU). 26. Прилад за будь-яким з пп. 19-25, який відрізняється тим, що згадані засоби контролю (МС) установлюються для здійснення електронного сканування за допомогою щонайменше одного контактного датчика (SU) для виконання ним аналізу частини щонайменше згаданих перших, других і, можливо, третіх ділянок згаданої стінки (PA). 27. Прилад за будь-яким з пп. 19-26, який відрізняється тим, що згадані засоби обробки (МТ) установлюються для здійснення порівняння даних карт, знятих зі згаданого контрольованого шворня (АЕ), з даними перших еталонних карт, які були одержані на першому еталонному шворні такого ж типу, що і контрольований, але не має вад, для збереження тільки даних, що містять індикації відбитих сигналів, які не представлені в згаданих перших еталонних картах, і складання, таким чином, корегованих карт. 28. Прилад за будь-яким з пп. 19-27, який відрізняється тим, що згадані засоби обробки (МТ) установлюються для здійснення порівняння даних карт, одержаних на згаданому контрольованому шворні (АЕ), з даними других еталонних карт, які були зняті з другого еталонного шворня такого ж типу, що і контрольований, але має відомі вади, і для збереження тільки даних, що містять індикації відбитих сигналів з відомими вадами, які були представлені в згаданих других еталонних картах, і складання, таким чином, карт вад. 29. Прилад за будь-яким з пп. 19-28, який відрізняється тим, що згадані засоби обробки (МТ) установлюються для проведення порівняння з вибраною амплітудою, що має порогову величину, амплітуд з даними карт, які були одержані на згаданому контрольованому шворні (АЕ), і збереження тільки даних, що містять індикації відбитих сигналів, амплітуди яких вище згаданої амплітуди, що має порогову величину, і які повідомляють інформацію про наявність вад, і складання, таким чином, карт вад. 30. Прилад за п. 29, який відрізняється тим, що згадані засоби обробки (МТ) установлюються для вироблення сигналу про порушення у випадку визначення амплітуди, яка вища амплітуди, що має порогову величину. 31. Прилад за будь-яким з пп. 19-30, який відрізняється тим, що він містить екран (EC) дисплея, призначений для виведення на нього щонайменше деяких згаданих карт, складених згаданими засобами обробки (МТ). 32. Прилад за будь-яким з пп. 19-31, який відрізняється тим, що кожний контактний датчик (SU) призначений для випромінювання ультразвукових коливань тільки в одному напрямку зі змінним кутом. 33. Прилад за п. 32, який відрізняється тим, що згаданий кут змінюється від приблизно 0° до приблизно 70° відносно поздовжнього або поперечного напрямку. 34. Прилад за будь-яким з пп. 19-31, який відрізняється тим, що кожний контактний датчик (SU) стосується типу фазованої решітки і призначений для випромінювання ультразвукових коливань у напрямках, які знаходяться в вибраному кутовому секторі. 35. Прилад за п. 34, який відрізняється тим, що згаданий кутовий сектор знаходиться у діапазоні від приблизно 0° до приблизно 70° відносно поздовжнього або поперечного напрямку. 15 UA 100024 C2 16 UA 100024 C2 17 UA 100024 C2 18 UA 100024 C2 Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 19
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and apparatus for automatic non-destructive testing of tubular axle shafts with variable internal and external radius profiles
Автори англійськоюLesage, Frederic, Noel, Alexandre, Nogueira de Paula, Renato
Назва патенту російськоюСпособ и прибор для ручного неразрушающего контроля полых шкворней оси, которые имеют профили поперечного сечения с переменными внутренним и внешним радиусами
Автори російськоюЛезаж Фредерик, Ноель Александр, Ногейра де Паула Ренато
МПК / Мітки
МПК: G01S 15/89, G01M 17/00, G01N 29/265, G01N 29/22, G01N 29/06
Мітки: шворнів, неруйнуючого, змінними, перерізу, прилад, контролю, осі, радіусами, спосіб, профілі, зовнішнім, порожнистих, поперечного, ручного, внутрішнім, мають
Код посилання
<a href="https://ua.patents.su/21-100024-sposib-i-prilad-dlya-ruchnogo-nerujjnuyuchogo-kontrolyu-porozhnistikh-shvorniv-osi-yaki-mayut-profili-poperechnogo-pererizu-zi-zminnimi-vnutrishnim-i-zovnishnim-radiusami.html" target="_blank" rel="follow" title="База патентів України">Спосіб і прилад для ручного неруйнуючого контролю порожнистих шворнів осі, які мають профілі поперечного перерізу зі змінними внутрішнім і зовнішнім радіусами</a>
Спосіб і пристрій для автоматичного неруйнуючого контролю трубчастих колісних осей з профілями з змінними внутрішнім і зовнішнім радіусами
Номер патенту: 98964
Опубліковано: 10.07.2012
Автори: Ногейра де Паула Ренато, Ноель Александр, Лезаж Фредерік
МПК: G01N 29/06, G01N 29/22, G01N 29/00, G01N 29/26, G01S 15/00, G01M 17/00
Мітки: зовнішнім, пристрій, колісних, автоматичного, трубчастих, неруйнуючого, контролю, внутрішнім, змінними, профілями, осей, радіусами, спосіб
Формула / Реферат:
1. Спосіб контролю колісних осей за допомогою ультразвукового(их) зонда(ів), який відрізняється тим, що цей спосіб включає наступні етапи, на яких:a) розміщують на контрольному стенді (ВС) трубчасту колісну вісь (АЕ), що містить стінку (РА), яка має профілі із змінними і відомими зовнішнім і внутрішнім радіусами;b) розміщують щонайменше один ультразвуковий зонд (SU) на зовнішній (SE) або на внутрішній (SI) поверхні згаданої...
Захоплювач профільних деталей з змінними параметрами відповідно до поперечного перерізу деталі (конструкції)
Номер патенту: 46240
Опубліковано: 15.05.2002
Автор: Ясиновий Анатолій Сергійович
МПК: B25B 25/00
Мітки: параметрами, відповідно, захоплювач, поперечного, деталей, деталі, змінними, конструкції, профільних, перерізу
Формула / Реферат:
Захоплювач профільних деталей (конструкцій), що містить основний важіль і два додаткових, який відрізняється тим, що основний важіль виконаний у вигляді двох протилежних одна одній площин з вертикальними прорізами, яких один і більше, до подовжніх прорізів, площини не жорстко приєднані до силової шпильки, один кінець якої з різзю взаємодіє з упорною гайкою з відповідною різзю, а другий кінець аналогічно - різзю з зрізаним конусом, центральним...
Штамп для отримання порожнистих деталей з зовнішнім та внутрішнім фланцем
Номер патенту: 65528
Опубліковано: 12.12.2011
Автори: Грудкіна Наталія Сергіївна, Алієва Лейла Іграмотдіновна, Мартинов Сергій Володимирович
МПК: B21J 13/02
Мітки: внутрішнім, зовнішнім, фланцем, деталей, штамп, порожнистих, отримання
Формула / Реферат:
Штамп для отримання порожнистих деталей з зовнішнім та внутрішнім фланцем, який містить контейнер, нижню півматрицю, верхню півматрицю, на котру спирається блок пружин та до якої приєднані тяги, який відрізняється тим, що до конструкції штампа входить порожнистий пуансон та протипуансон, верхня оправка, що підпружинена, та нижня оправка.
Спосіб виробництва багатошарових металевих труб із внутрішнім і зовнішнім плакованими покриттями
Номер патенту: 20160
Опубліковано: 15.01.2007
Автори: Бідношея Марина Валентинівна, Петруняк Володимир Ярославович, Бідношея Марія Олександрівна
МПК: B23K 20/10, B23K 20/04
Мітки: спосіб, плакованими, багатошарових, виробництва, металевих, внутрішнім, труб, зовнішнім, покриттями
Формула / Реферат:
1. Спосіб виробництва багатошарових металевих труб із внутрішнім і зовнішнім плакованими покриттями, що включає формування двох стрічок із сталі та іншого металу в трубну заготовку, її гаряче деформування, зварювання внутрішнього і зовнішнього швів трубних заготовок, наступне стикове зварювання з одержанням труби, який відрізняється тим, що для виробництва багатошарових металевих труб використовують металевий лист, який по ширині має на...
Спосіб нарізування зубчатих виробів з зовнішнім та внутрішнім неевольвентним зачепленням
Номер патенту: 43044
Опубліковано: 27.07.2009
Автори: Федорінов Володимир Анатолійович, Нечаєва Лілія Анатолієвна, Коновалов Олексій Дмитрович, Бобух Іван Олексійович, Бобух Олексій Іванович
МПК: B23F 21/00
Мітки: нарізування, зовнішнім, зачепленням, зубчатих, неевольвентним, внутрішнім, виробів, спосіб
Формула / Реферат:
Спосіб нарізування зубчатих виробів з зовнішнім та внутрішнім неевольвентним зачепленням, профіль котрого має увігнуті ділянки, інструментом, ріжучі кромки котрого мають відповідний профіль, з подачею інструмента до дотику базової поверхні, який відрізняється тим, що спряжені кромки циліндричної поверхні деталі та профільних пазів обробляються ріжучою кромкою того ж інструмента, а кривизна ділянок, що обробляють кромки, зворотна кривизні...
Попередній патент: Шихта для виготовлення хромоксидних вогнетривів
Наступний патент: Спосіб виготовлення каталізатора синтезу вуглеводнів та використання його в процесі синтезу вуглеводнів
Випадковий патент: Пристрій розгальмування колодкового гальма