Захоплювальний пристрій
Номер патенту: 32431
Опубліковано: 12.05.2008
Автори: Мошковський Олег Миколайович, Грисюк Олександр Віталійович, Кузнєцов Юрій Миколайович

Формула / Реферат
Захоплювальний пристрій, що містить корпус, закріплений на ньому пневмоциліндр і затискні губки, при цьому пневмоциліндр оснащений поршнем з штоком, а затискні губки виконані у вигляді еластичних балонів і розташовані з боку штокової частини пневмоциліндра, який відрізняється тим, що еластичні балони виконані у вигляді набору кілець тороїдальної форми, співвісно розташованих відносно пневмоциліндра.
Текст
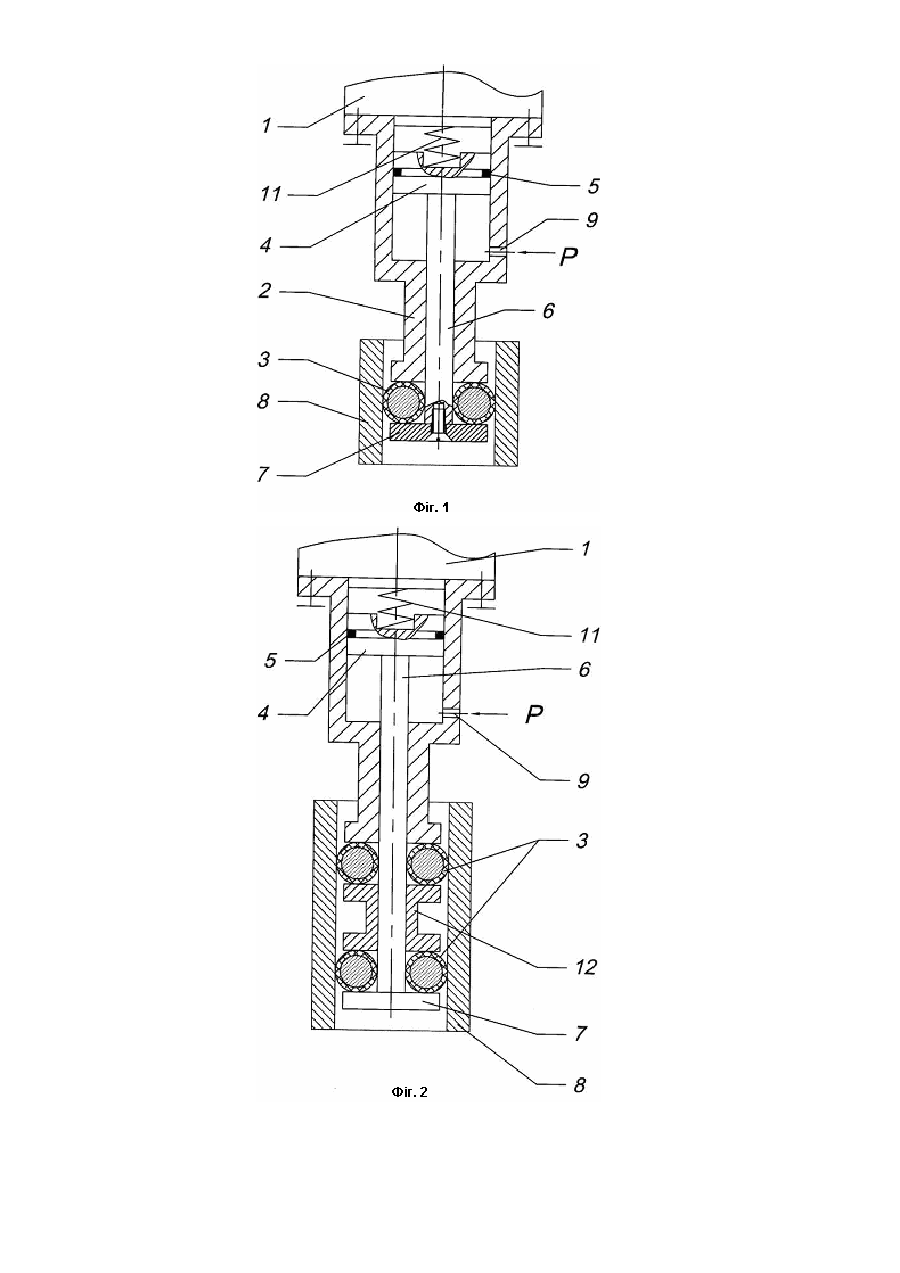
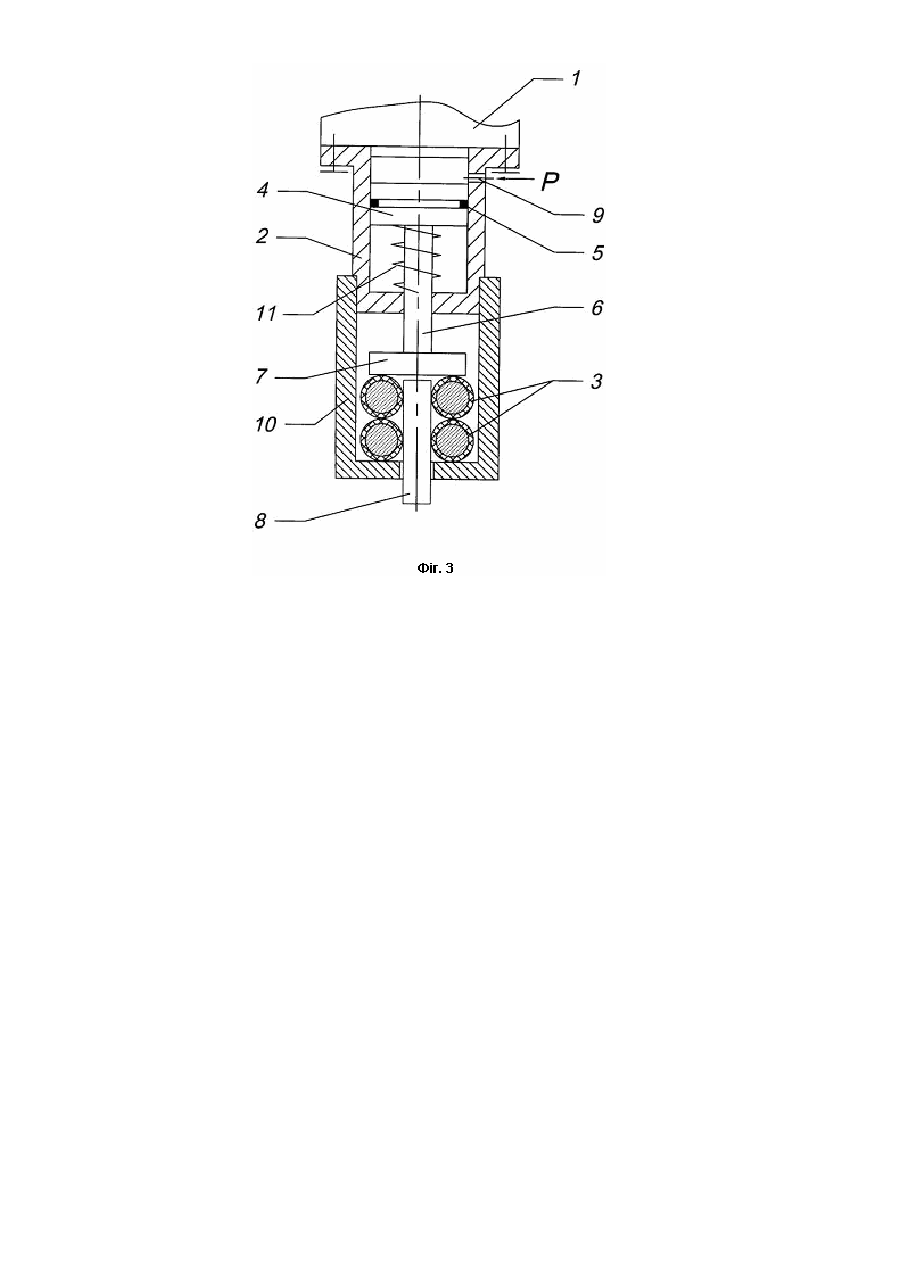
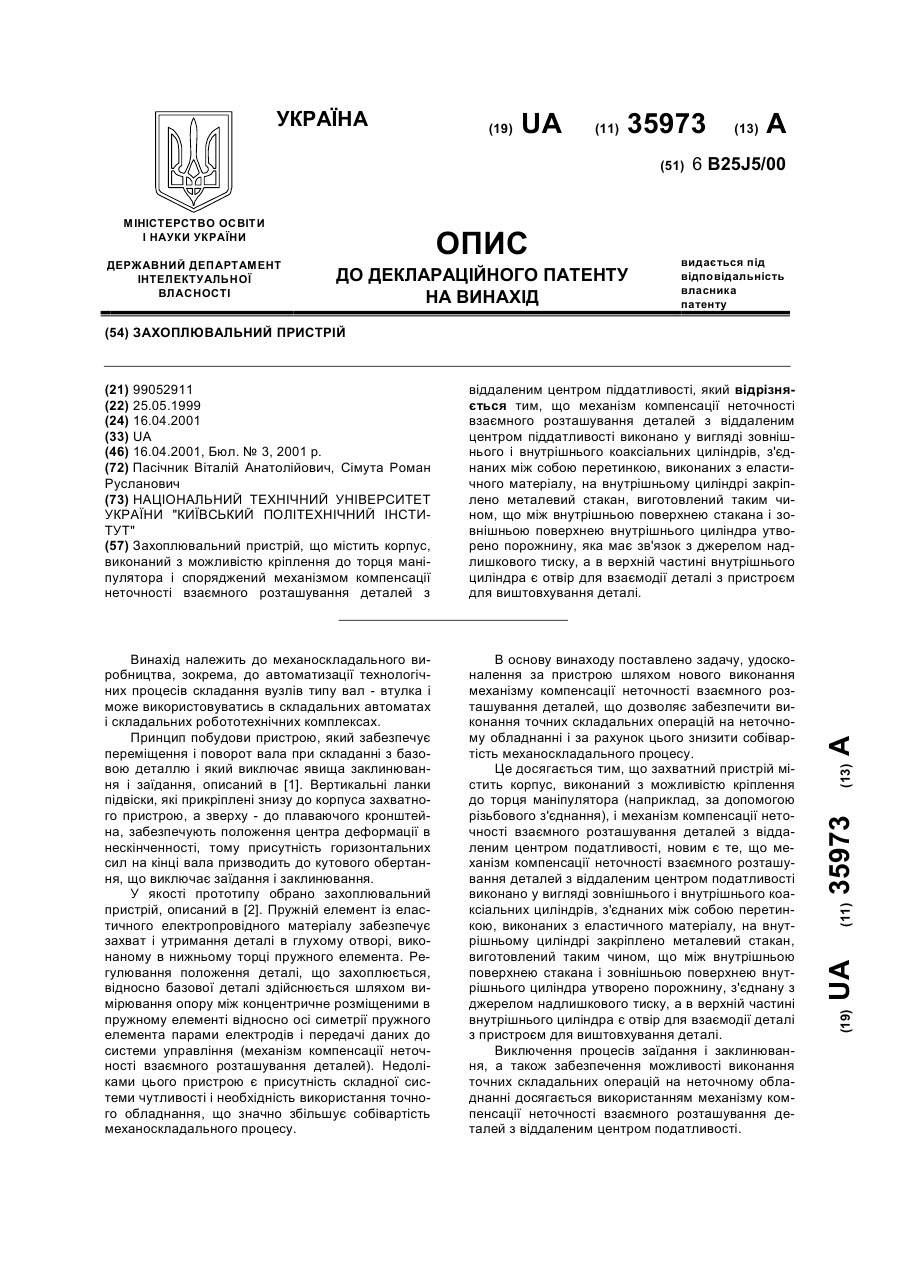
Корисна модель відноситься до галузі машинобудування і може бути використана в маніпуляторах промислових роботів. Відомі захватні пристрої подібного призначення [1], що містять затискні губки з еластичними камерами для захвату деталей по зовнішній і внутрішній поверхням, які мають вигляд оболонки, наприклад, гумової у вигляді стакану, або гофрированної з односторонніми порожніми пальцями. Ці пристрої працюють під дією тиску повітря або рідини і дозволяють компенсувати похибки позиціювання або, навпаки, практично втрачають таку можливість, що є їх недоліком. Відомі також захватні пристрої [2], які виконані у вигляді трубки Бурдона, порожнина якої має можливість зв'язуватися з джерелом живлення робочого середовища завдяки багатоканальним розподілювачам. Недоліком таких захватних пристроїв є обмежені технологічні можливості - захват тільки по зовнішній поверхні деталі і по обмеженій поверхні контакта, а також зміщення осі деталі відносно осі трубки, що знижує точність центрування. Перелічені недоліки відсутні в адаптивному схваті маніпулятора [3], який додатково оснащений одностороннім клапаном, що розташований на торці безштокової порожнини пневмоциліндру, а поршень підпружинений відносно згаданого торця і виконаний у вигляді порожнього, відкритого з боку торця, розташованого в безштоковій порожнині пневмоциліндра з додатковими порожнинами. Однак присутній інший недолік - складність системи керування і необхідність введення додаткових каналів зв'язку з порожнинами. Крім того для захвату деталей по внутрішній поверхні це потребує суттєвих змін поза штокової частини, що теж ускладнює конструкцію. Найближчим аналогом, прийнятим за прототип, обраний захватний пристрій [4], що містить корпус, закріплений на ньому пневмоциліндр і затискні губки, при цьому пневмоциліндр оснащений поршнем із штоком, а затискні губки виконані у вигляді еластичних балонів і розташовані з боку штокової частини пневмоциліндра. Суттєвими недоліками прототипу залишаються: по-перше, обмежені технологічні можливості при захваті деталей різної форми, довжини і діаметру; по-друге, зниження точності центрування деталей; по-третє, необхідність ускладнення конструкції за рахунок виконання інших форм і розмірів еластичних балонів; вчетверте, неможливість регулювання сили контактної взаємодії затискних губок в залежності від ваги деталі - об'єкта маніпулювання. В основу корисної моделі поставлена задача удосконалення захватного пристрою шляхом того, що еластичні балони виконані у вигляді набору кілець тороідальної форми, співосно розташованих відносно пневмоциліндра, що дозволяє досягнути технічний результат - підвищити технологічні можливості і точність позиціювання. Розв'язання поставленої задачи досягається тим, що в захватному пристрої, що містить корпус, закріплений на ньому пневмоциліндр і затискні губки, при цьому пневмоциліндр оснащений поршнем із штоком, а затискні губки виконані у вигляді еластичних балонів і розташовані з боку штокової частини пневмоциліндра, новим є те, що еластичні балони виконані у вигляді одного або кількох кілець тороідальної форми. Завдяки цьому, при різній кількості кілець в наборі в залежності від ваги, форми і розмірів деталі можливо спростити конструкцію, регулювати силу затиску і забезпечити захват по зовнішній і внутрішній поверхням деталей. Співвісне розташування набору кілець відносно пневмоциліндра дозволяє підвищити точність центрування або позиціювання. Суть корисної моделі пояснюється кресленнями, де на Фіг.1 зображено поперечний переріз захватного пристрою з одним еластичним тороідальним кільцем для захвату коротких кільцевих деталей по внутрішній поверхні; на Фіг.2 - поперечний переріз захватного пристрою з набором еластичних тороїдальних кілець для захвату довгомірних трубних деталей по внутрішній поверхні; Фіг.3 - поперечний переріз захватного пристрою з набором еластичних тороідальних кілець для захвату циліндричних (або гранних) деталей по зовнішній поверхні. Захватний пристрій містить корпус 1 (Фіг.1), закріплений на ньому пневмоциліндр 2 і затискні губки 3, які виконані у вигляді еластичних кільцевих балонів тороідальної форми. Пневмоциліндр 2 оснащений поршнем 4 з ущільнюючими кільцями 5 і штоком 6, на торці якого прикріплений упорний диск 7. Еластичні тороїдальні кільця 3 (Фіг.1, 2) співосно розташовані завдяки штоку 6 відносно пневмоциліндра 2. Для затиску деталі 8 використовується тиск Р повітря, яке подається в отвір 9 пневмоциліндра 2 (Фіг.1-3). Співосність набору еластичних кілець 3 забезпечується насадкою 10 (Фіг.3), яка в свою чергу сцентрована відносно пневмоциліндра 2. Відвід штока 6 забезпечує сила пружності еластичних кілець 3 із замкненим в них повітрям, або додатково (для надійності розтиску) пружина 11 (Фіг.1-3). При маніпулюванні довгомірними деталями, між еластичними тороідальними кільцями 3 можливе використання проміжної втулки 12 (Фіг.2). Захватний пристрій працює наступним чином. Шток 6 з кільцем 3 вільно входить в отвір деталі 8 (Фіг.1) або вільно охоплює ззовні деталь 8 (Фіг.3). Повітря під тиском Р подається через отвір 9 в поза штокову порожнину пневмоциліндра, переміщуючи поршень 4 і шток 6 так, що стискаються (сплющуються) еластичні тороїдальні кільця 3. Це забезпечує зміну діаметра затискної поверхні кілець 3, натяг в зоні їх контактування з деталлю 8 з нормальною (радіальною) силою, яка надійно утримує деталь 8 від випадання, або вириву, під силами тертя між поверхнями кілець і деталі. Для звільнення деталі 8 після завантаження в робочу позицію тиск повітря знімається (Р=0), а шток 6 з поршнем 4 під дією пружини 11 відходять у вихідне положення. Налагодження захватного пристрою на форму, розмір і силу затиску деталі здійснюються кількістю еластичних тороідальних кілець 3, їх розмірами, а також тиском повітря Р в системі керування пневмоприводом. Джерела інформації. 1. Хмельницький Ю.В. Расчёт и конструирование захватных устройств промышленных роботов - К.: УМК ВО, 1990. - 76с.(рис.15 [а, б, г] стр.8) 2. А.с. СССР №1815222. Устройство для захвата детали. МПК B25J15/12, B25J15/00, опублик. 15.09.93г. Бюл.№18. 3. Заявка Франции №2601612. Захватное устройство МПК В25 11/00, 1988г. 4. Патент РФ №2021099. Адаптивный схват манипулятора. МПК B25J15/12, опублик. 15.10.94г. Бюл. №19.
ДивитисяДодаткова інформація
Назва патенту англійськоюGripping device
Автори англійськоюKuznetsov Yurii Mykolaiovych, Hrysiuk Oleksandr Vitaliiovych, Moshkovskyi Oleh Mykolaiovych
Назва патенту російськоюЗахватное устройство
Автори російськоюКузнецов Юрий Николаевич, Грисюк Александр Витальевич, Мошковский Олег Николаевич
МПК / Мітки
МПК: B25J 15/00, B25J 15/12, B25B 11/00
Мітки: захоплювальний, пристрій
Код посилання
<a href="https://ua.patents.su/3-32431-zakhoplyuvalnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Захоплювальний пристрій</a>
Захоплювальний пристрій промислового робота

Номер патенту: 32260
Опубліковано: 12.05.2008
Автори: Годунко Максим Олегович, Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: B65H 9/10
Мітки: промислового, робота, пристрій, захоплювальний
Формула / Реферат:
Захоплювальний пристрій промислового робота, що складається з пневмоциліндра, в якому розміщені поршень зі штоком, та приєднаних до штока затискних важелів з чотирма призматичними затискними елементами, який відрізняється тим, що два призматичні затискні елементи виконано рухомими.
Захоплювальний пристрій для поштучного відділення, захоплювання і переміщення плоских еластичних деталей верху взуття

Номер патенту: 25851
Опубліковано: 27.08.2007
Автори: Бурко-Бурчак Олег Юрійович, Горященко Сергій Леонідович
МПК: B65H 3/32
Мітки: плоских, верху, деталей, захоплювання, поштучного, пристрій, відділення, переміщення, взуття, захоплювальний, еластичних
Формула / Реферат:
Захоплювальний пристрій для поштучного відділення, захоплювання і переміщення плоских еластичних деталей верху взуття, що містить захоплювальний орган, який відрізняється тим, що захоплювач виконаний у вигляді барабана з можливістю обертання, зовнішня поверхня якого покрита шаром матеріалу із підвищеним коефіцієнтом тертя, який через фронтальні кришки з'єднаний з валом, до якого приєднаний електромагніт з можливістю повороту на 5°, при цьому...
Захоплювальний пристрій
Номер патенту: 35973
Опубліковано: 16.04.2001
Автори: Сімута Роман Русланович, Пасічник Віталій Анатолійович
МПК: B25J 5/00
Мітки: захоплювальний, пристрій
Формула / Реферат:
Захоплювальний пристрій, що містить корпус, виконаний з можливістю кріплення до торця маніпулятора і споряджений механізмом компенсації неточності взаємного розташування деталей з віддаленим центром піддатливості, який відрізняється тим, що механізм компенсації неточності взаємного розташування деталей з віддаленим центром піддатливості виконано у вигляді зовнішнього і внутрішнього коаксіальних циліндрів, з'єднаних між собою перетинкою,...
Захоплювальний пристрій
Номер патенту: 28423
Опубліковано: 10.12.2007
Автори: Нуржинський Борислав Богданович, Гук Зіновій Васильович
МПК: B66C 1/22
Мітки: пристрій, захоплювальний
Формула / Реферат:
Захоплювальний пристрій, що містить балку зі скобою для навішування на гак крана, елементи зубчастого зачеплення, шарнірно змонтовані на кінцях балки, захоплювачі і рукоятки, який відрізняється тим, що елементи зубчастого зачеплення кожного кінця балки розташовані в горизонтальній площині і виконані у вигляді двох зубчастих коліс, постійно зчеплених проміжною шестірнею між ними, в поперечній до балки площині знизу до валів зубчастих коліс з...
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович
МПК: F16S 5/00
Мітки: робота, пристрій, двозахватний, промислового
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Попередній патент: Пристрій для аерації рідини в ферментерах
Наступний патент: Цанговий патрон
Випадковий патент: Розсадосадильна машина