Захоплювальний пристрій
Номер патенту: 35973
Опубліковано: 16.04.2001
Автори: Пасічник Віталій Анатолійович, Сімута Роман Русланович

Формула / Реферат
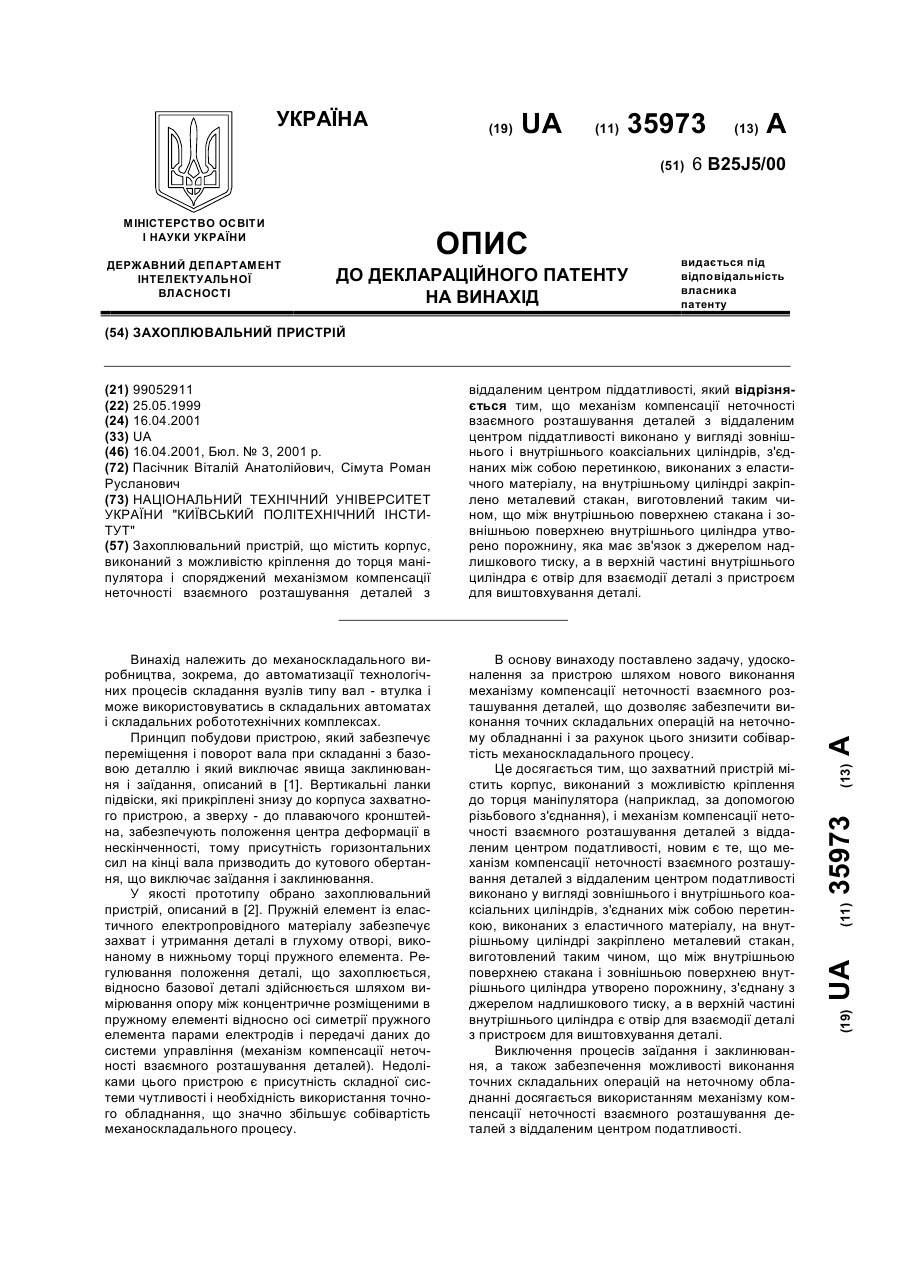
Захоплювальний пристрій, що містить корпус, виконаний з можливістю кріплення до торця маніпулятора і споряджений механізмом компенсації неточності взаємного розташування деталей з віддаленим центром піддатливості, який відрізняється тим, що механізм компенсації неточності взаємного розташування деталей з віддаленим центром піддатливості виконано у вигляді зовнішнього і внутрішнього коаксіальних циліндрів, з'єднаних між собою перетинкою, виконаних з еластичного матеріалу, на внутрішньому циліндрі закріплено металевий стакан, виготовлений таким чином, що між внутрішньою поверхнею стакана і зовнішньою поверхнею внутрішнього циліндра утворено порожнину, яка має зв'язок з джерелом надлишкового тиску, а в верхній частині внутрішнього циліндра є отвір для взаємодії деталі з пристроєм для виштовхування деталі.
Текст
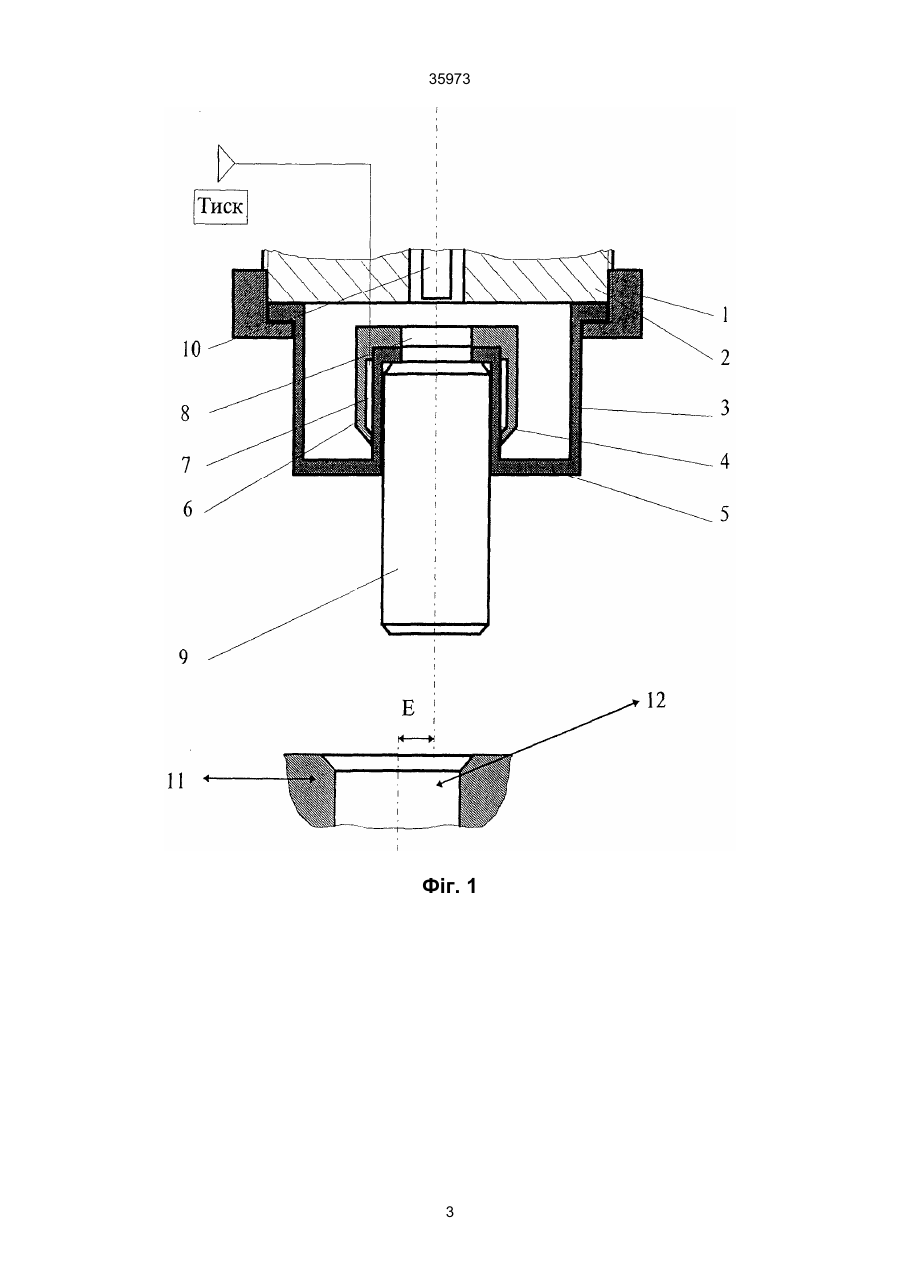
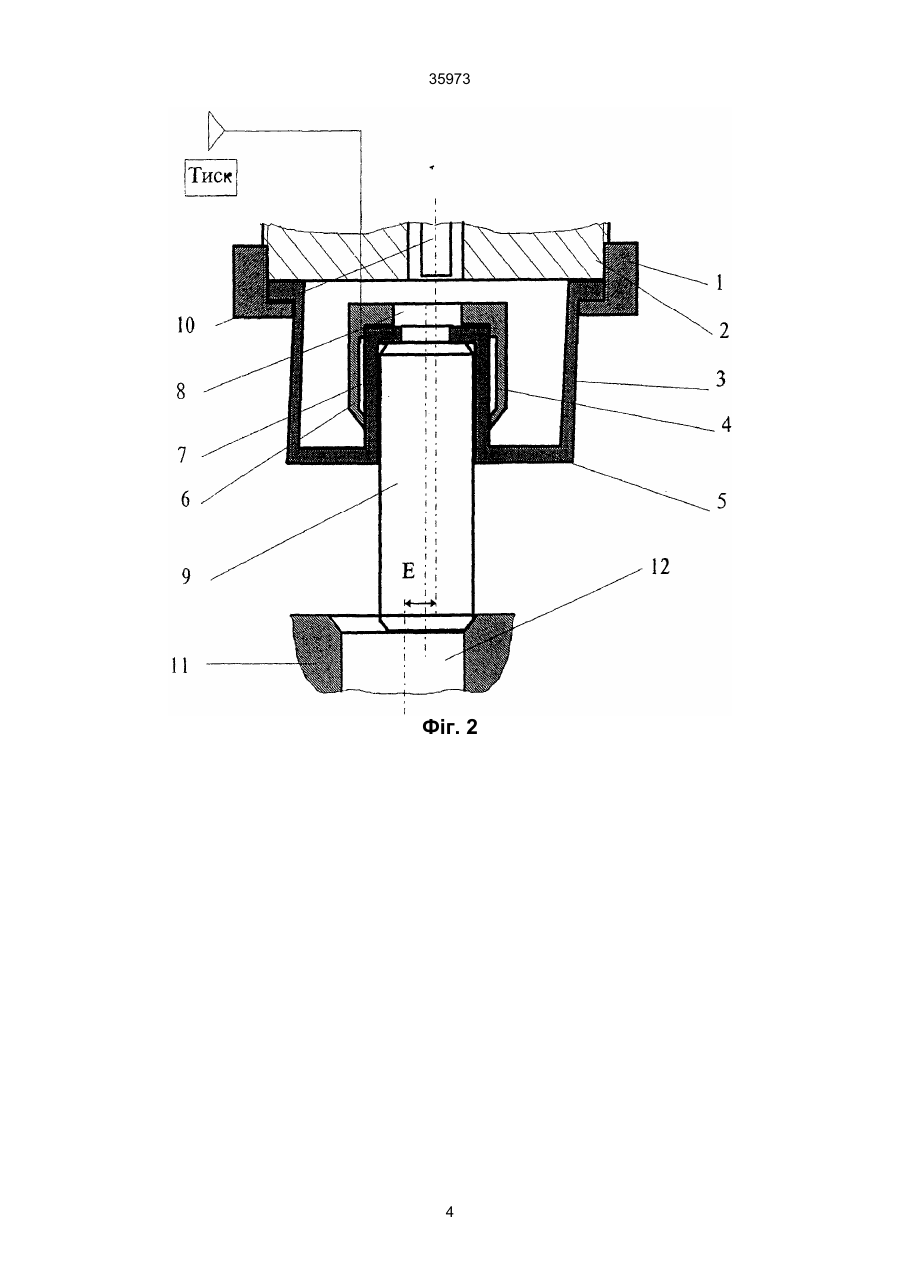
Захоплювальний пристрій, що містить корпус, виконаний з можливістю кріплення до торця маніпулятора і споряджений механізмом компенсації неточності взаємного розташування деталей з 35973 На фіг. 1 зображено загальний вигляд пристрою в розрізі, на фіг. 2 - складальний процес у випадку, якщо ексцентриситет Е буде меншим від суми радіальних розмірів фасок деталей, що складаються, на фіг. 3 - складальний процес у випадку, якщо ексцентриситет Е буде більшим від суми радіальних розмірів фасок деталей. Захоплювальний пристрій складається з корпуса 1, виконаного з можливістю кріплення до торця маніпулятора 2 (наприклад за допомогою різьбового з'єднання), і механізму компенсації неточності взаємного розташування деталей з віддаленим центром податливості , виконаного у вигляді зовнішнього 3 і внутрішнього 4 коаксіальних циліндрів, з'єднаних між собою перетинкою 5, виконаних з еластичного матеріалу. На внутрішньому циліндрі закріплено металевий стакан 6, циліндрична порожнина і тіло якого закінчуються конічним скосом всередину, тобто, між внутрішньою поверхнею стакана і зовнішньою поверхнею внутрішнього циліндра 4 утворено порожнину 7, яка з'єднана з джерелом надлишкового тиску, а в верхній частині внутрішнього циліндра 4 є отвір 8 для взаємодії деталі 9 з пристроєм для виштовхування деталі 10 (штоком). У початковому положенні шток 10 заховано в маніпуляторі 2. Пристрій працює наступним чином. Для захоплення деталі 9 маніпулятор разом з захоплюючим пристроєм переміщується в зону, де встановлені об'єкти маніпулювання. Коли деталь 9 повністю заходить всередину внутрішнього циліндра 4, рука робота зупиняється, в порожнину 7 подається тиск, стінки внутрішнього циліндра 4 деформуються, тим самим затискуючи (захоплюючи) деталь 9. Після транспортування деталі 9 на позицію складання на якій вже встановлена базова деталь 11 з отвором 12, рука робить разом із складаль ним пристроєм і деталлю 9 позиціонується над складальною зоною і опускається. При цьому можливі три випадки. Перший, коли ексцентриситет Е дорівнює нулю (на фіг. не показано), тоді складання виконується без проблем. Другий, коли ексцентриситет Е менший за суму радіальних розмірів фасок деталей 9 і 11. Тоді при опусканні маніпулятора деталь 9 буде ковзати по фасці отвору 12 доти, доки не зайде у отвір (фіг. 2), при цьому змінює своє положення вісь зовнішнього циліндра 3. У третьому випадку (фіг. 3) ексцентриситет Е більший за суму радіальних розмірів фасок деталей 9 і 11. Тоді, при опусканні маніпулятора, після торкання торців деталей 9 і 11, деталь 9 почне повертатися навколо точок А і Б (на фіг. 3) вони спроектовані в одну) проти годинникової стрілки доти, поки кут повороту не стане достатньо великим для того, щоб деталь 9 увійшла у отвір 12 базової деталі 11. При цьому змінюють своє положення осі обох циліндрів 3 і 4. Після складання деталей 9 і 11, тиск в порожнині 7 знімають і деталь 9 звільнюється. При цьому можливий випадок, що деталь 9 не зможе висковзнути із порожнини внутрішнього циліндра 4. Тому разом із відводом маніпулятора шток 10 виштовхує деталь 9 із порожнини внутрішнього циліндра 4. Механізм компенсації неточності взаємного розташування деталей з віддаленим центром податливості може бути виконаним у вигляді будьяких геометричних фігур (призм, сфер і т. і.) чи їх комбінацій. Джерела інформації: 1. Промышленные роботы: Конструирование, управление, эксплуатация. Костюк В.И., Гавриш А.П., Ямпольский Л.С., Карлов А.Г. - К.: Вища шк., 1985. - 359 с. 2. Авторское свидетельство СССР № 1808693 (МКИ 5 В25 J 15/00), 1993. 2 35973 Фіг. 1 3 35973 Фіг. 2 4 35973 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюGripping device
Автори англійськоюPasichnyk Vitalii Anatoliiovych, Simuta Roman Ruslanovych
Назва патенту російськоюЗахватное устройство
Автори російськоюПасечник Виталий Анатольевич, Симуна Роман Русланович
МПК / Мітки
МПК: B25J 5/00
Мітки: пристрій, захоплювальний
Код посилання
<a href="https://ua.patents.su/5-35973-zakhoplyuvalnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Захоплювальний пристрій</a>
Вузол осьової фіксації деталей

Номер патенту: 749
Опубліковано: 15.03.2001
Автори: Омеляненко Володимир Миколайович, Ситнік Анатолій Володимирович
Мітки: осьової, фіксації, деталей, вузол
Формула / Реферат:
1. Вузол осьової фіксації деталей, який містить в собі охоплювану деталь з кільцевою проточкою, d якій установлено знімну шайбу, який відрізняється тим, що шайба установлена з ексцентриситетом до охоплюваної деталі, має внутрішній діаметр, який більше або дорівнює зовнішньому діаметру охоплюваної деталі, і зафіксована від зміщення в поперечній площині.2. Вузол за п. 1, який відрізняється тим, що шайба зафіксована від зміщення в...
Пристрій для клеймування деталей верху і підкладки взуття
Номер патенту: 30304
Опубліковано: 15.11.2000
Автори: Поліщук Олег Степанович, Кармаліта Анатолій Костянтинович
МПК: A43D 8/00
Мітки: пристрій, взуття, деталей, верху, клеймування, підкладки
Формула / Реферат:
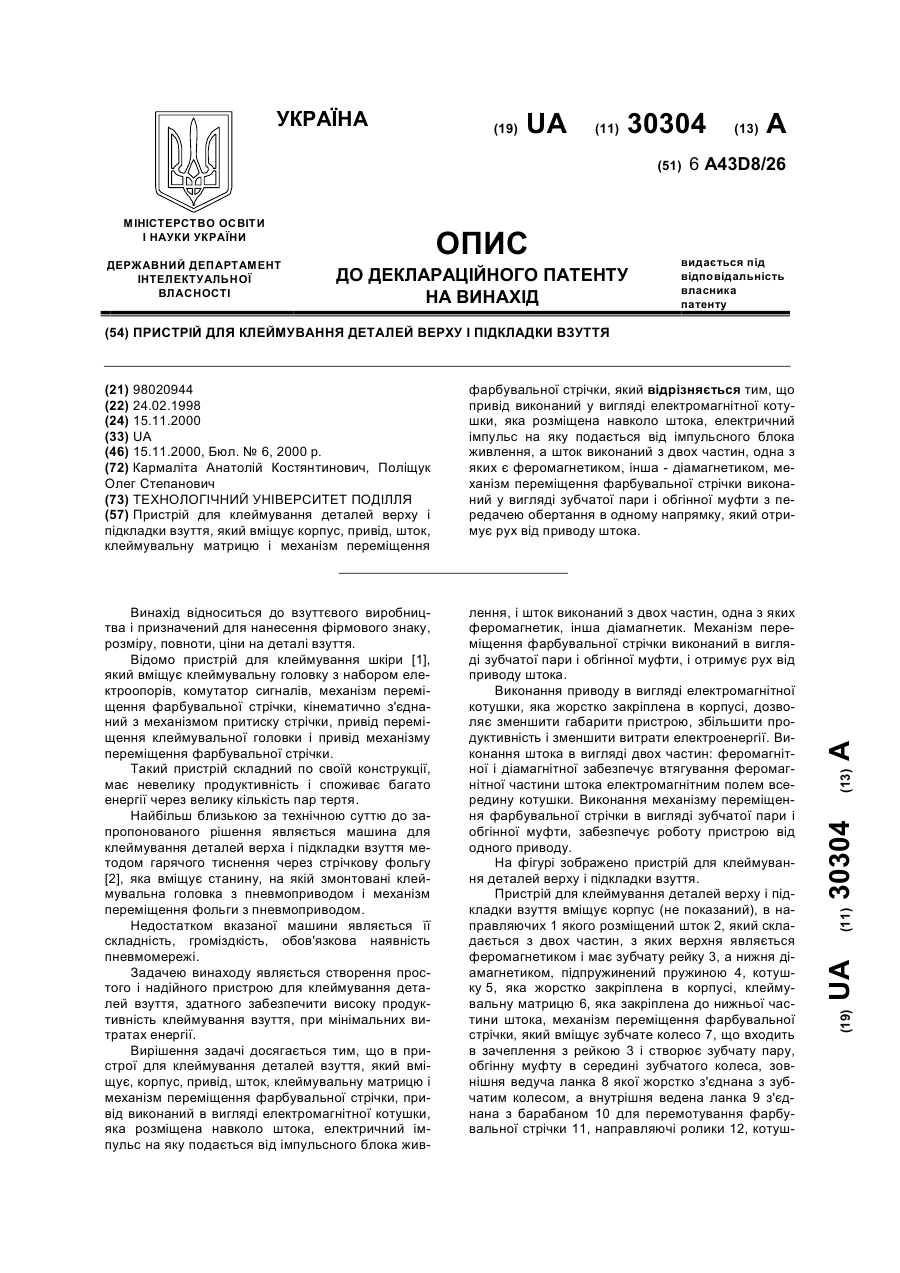
Пристрій для клеймування деталей верху і підкладки взуття, який вміщує корпус, привід, шток, клеймувальну матрицю і механізм переміщення фарбувальної стрічки, який відрізняється тим, що привід виконаний у вигляді електромагнітної котушки, яка розміщена навколо штока, електричний імпульс на яку подається від імпульсного блока живлення, а шток виконаний з двох частин, одна з яких є феромагнетиком, інша - діамагнетиком, механізм переміщення...
Магнітний пристрій для закріплення феромагнітних деталей
Номер патенту: 30869
Опубліковано: 15.12.2000
Автори: Федоров Федір Олександрович, Пилипенко Юрій Дмитрович, Кушнір Володимир Миколайович
Мітки: пристрій, феромагнітних, закріплення, магнітний, деталей
Текст:
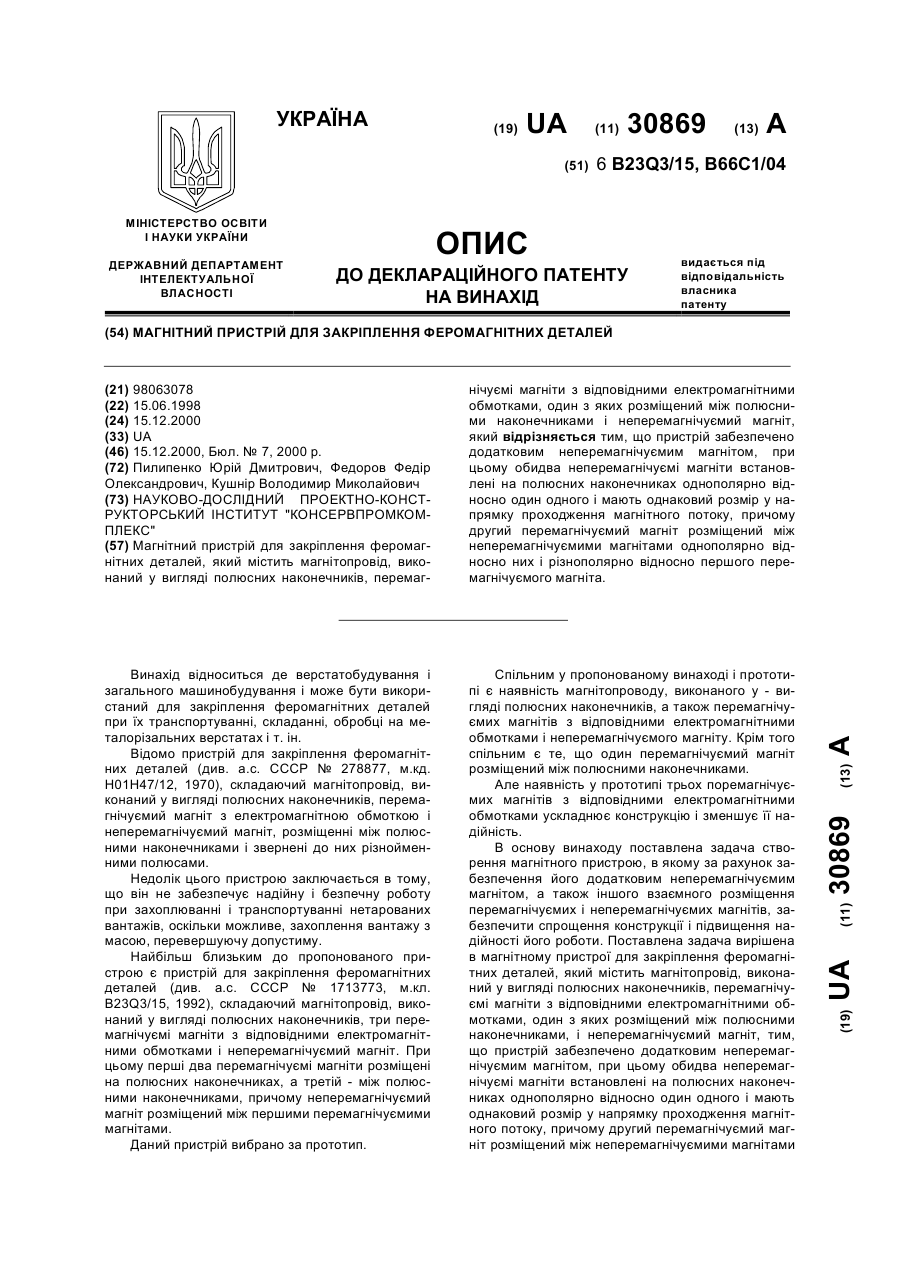
...фіг. 2 - у включеному на повну потужність стані; - фіг. 3 - у виключеному стані. Магнітний пристрій для закріплення феромагнітних деталей включає магнітопровід, виконаний у вигляді полюсних наконечників 1 і 2, розміщений між ними перемагнічуємий магніт 3 з електромагнітною обмоткою 4, неперемагнічуємий магніт 5, перемагнічуємий магніт 6 з електромагнітною обмоткою 7 і додатковий неперемагнічуємий магніт 8. При цьому неперемагнічуємі магніти 5...
Пристрій для газокисневого різання і зварювання металів

Номер патенту: 770
Опубліковано: 15.03.2001
Автори: Лисенко Юрій Миколайович, Кагановський Андрій Йосипович
МПК: B23K 7/00, F23D 14/42, B23K 5/00, F23D 14/40
Мітки: різання, пристрій, газокисневого, зварювання, металів
Формула / Реферат:
1. Пристрій для газокисневого різання і зварювання металів, який містить корпус з виконаними в ньому, каналами подачі кисню і горючого газу, наконечник з мундштуком, інжектор і змішувальну камеру з циліндричною частиною і дифузором, який відрізняється тим, що циліндрична частина змішувально; камери пристрою виконана в одній деталі з інжектором, указана деталь виконана змінною, а в корпусі виконана порожнина для установки указаної змінної...
Пристрій для відокремлення та захвату м’яких плоских деталей зі стосу
Номер патенту: 34912
Опубліковано: 15.03.2001
Автори: Тітовський Юрій Ігорович, Поліщук Ганна Володимирівна, Коновал Віктор Павлович
МПК: B65H 20/00
Мітки: м'яких, захвату, відокремлення, плоских, стосу, деталей, пристрій
Формула / Реферат:
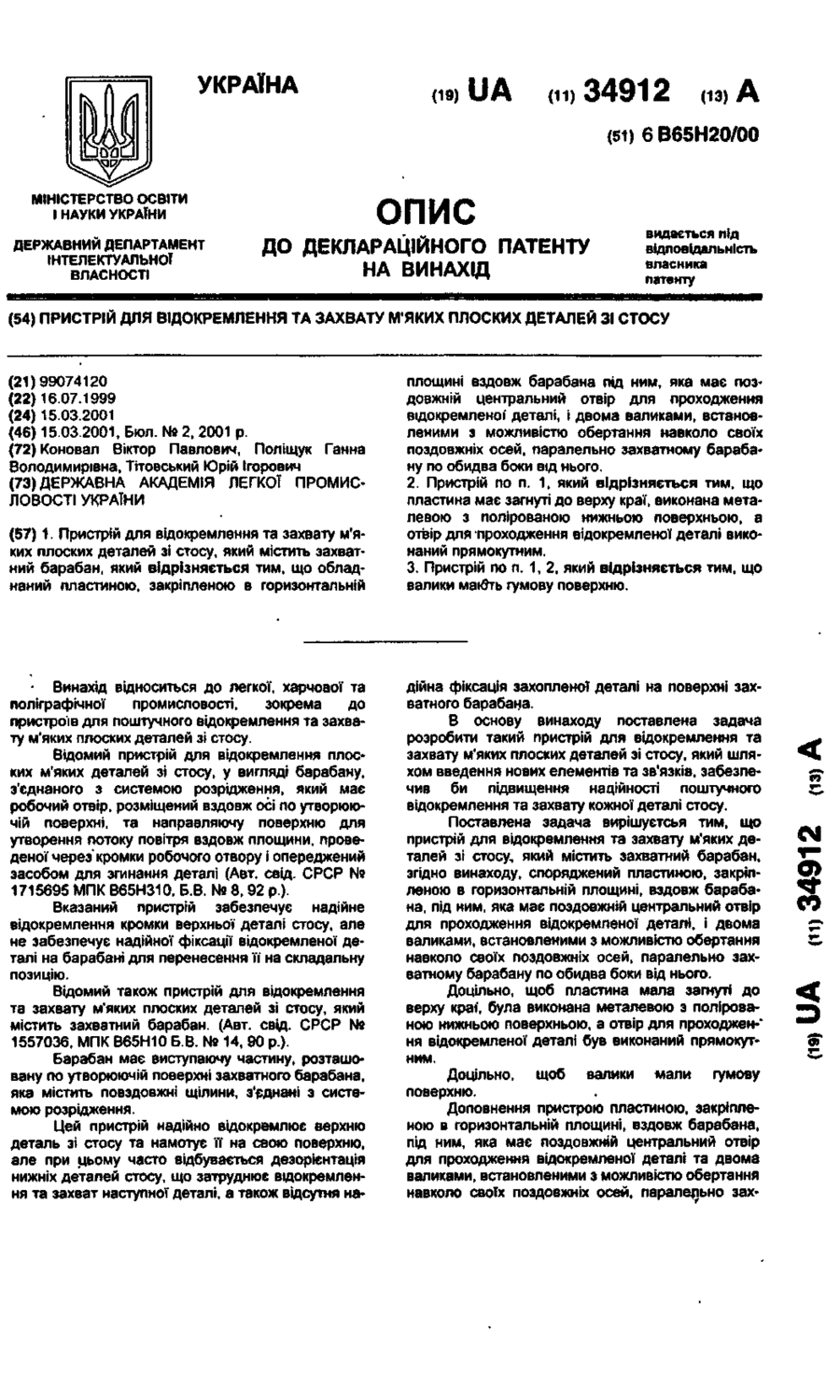
1. Пристрій для відокремлення та захвату м'яких плоских деталей зі стосу, який містить захватний барабан, який відрізняється тим, що обладнаний пластиною, закріпленою в горизонтальній площині вздовж барабана під ним, яка має поздовжній центральний отвір для проходження відокремленої деталі, і двома валиками, встановленими з можливістю обертання навколо своїх поздовжніх осей, паралельно захватному барабану по обидва боки від нього.2....
Попередній патент: Озоно-терапевтичний апарат
Випадковий патент: Безалкогольний напій "віва"